总裁椅是一款专为企业管理人员设计的高档办公座具, 在市面上总裁椅的款式有很多, 但绝大部分是不提供休闲功能的, 随着社会节奏的加快, 客户对座椅的休闲功能需求也越来越大。
以下为本篇论文正文:
摘 要:针对客户需求, 依据人机工程学原理设计了一款总裁椅用搁脚机构。运用Adams软件对建立的三维模型进行运动学仿真, 验证了机构的运动特性, 基于AWE环境对机构进行有限元分析, 校核了结构的强度和刚度, 在实物样机的基础上进行力学性能测试。结果表明, 设计的搁脚机构满足人机尺寸要求和运动平稳性要求, 结构的静强度、疲劳强度和刚度符合BIFMA测试标准, 试验研究结果与有限元分析结果相符合。
关键词:人机工程学; 搁脚机构; 运动学仿真; 有限元分析; 样机测试;
Abstract:According to customers' needs, Based on ergonomics principle, a Boss Chair footrest was designed. Using Adams software to take kinematics simulation, which has verified the movement characteristics of the organization. Based on finite element analysis AWE environment on the organization, To check the strength and stiffness of the structure. On the basis of the physical prototype, to take mechanical properties test. It turned out that the footrest meet requirements of ergonomics size and movement stability, static strength, fatigue strength and stiffness of the structure conform to the BIFMA test standard. The testing results coincided with the finite element analysis.
Keyword:Ergonomics; Footrest; Kinematics simulation; Finite element analysis; Prototype test;
一、引言
总裁椅是一款专为企业管理人员设计的高档办公座具, 在市面上总裁椅的款式有很多, 但绝大部分是不提供休闲功能的, 随着社会节奏的加快, 客户对座椅的休闲功能需求也越来越大。搁脚机构作为人体腿部支撑的重要结构逐渐出现在总裁椅中, 而大部分搁脚机构是手动抽出并翻转的, 操作上多有不便, 基于“老板们”对高质量的办公状态的追求, 电动式总裁椅用搁脚机构应运而生。
本文根据某椅业的研发项目, 依据人机工程学原理, 设计一款功能合理, 强度、寿命达标的搁脚机构。在结构模型的基础上进行运动学仿真, 得到相关力、角速度等函数曲线以验证模型的运动特性, 通过有限元分析, 得出结构的强度和寿命。制作实物样机进行试验研究。
二、 搁脚机构设计
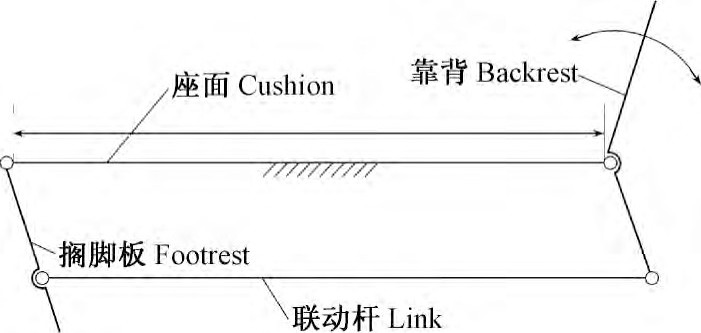
搁脚机构作为人腿部的重要支撑平台, 依据人机工程学要求, 应具备一定的运动平稳性[1], 不能存在较大的速度和加速度突变, 否则将对用户的身体和心理上产生不适感。同时, 按照人机尺寸要求, 为了保证搁脚机构对腿部有良好的支撑, 搁脚板打开时应该与地面保持水平, 且距离座面前端为390 mm~440 mm, 同时, 搁脚板收回的角度应为110°~120°, 才能使收回的搁脚机构美观大方、容腿空间充足 (人在坐姿状态下, 小腿姿势多变, 例如后屈、前伸等) .依据传统总裁椅设计规则, 坐面距地面的最低高度为320 mm, 因此, 在搁脚板展开的过程中要避免最前端触及地面, 同时在最终的展开状态下能达到搁脚板所要求的长度。参考目前市场上的办公椅搁脚机构展开形式, 常见的是平面四杆机构如图1所示, 搁脚板是由内向外翻转展开, 其特点是两曲柄 (靠背和搁脚板) 始终保持平行, 且角位移、角速度和角加速度始终相等, 搁脚板的运动是与靠背是联动的, 缺乏一定的独立性, 且不能根据个人需求而任意调节;联动杆过长, 外露过多, 可能挤压夹手;椅背后仰角度有限, 使得搁脚板打开角度不够;由于考虑到脚板展开时要避免触碰到地面, 搁脚板的长度会有所限制。
图1 平面四杆机构简图Fig.1 Planar four-bar mechanism diagram
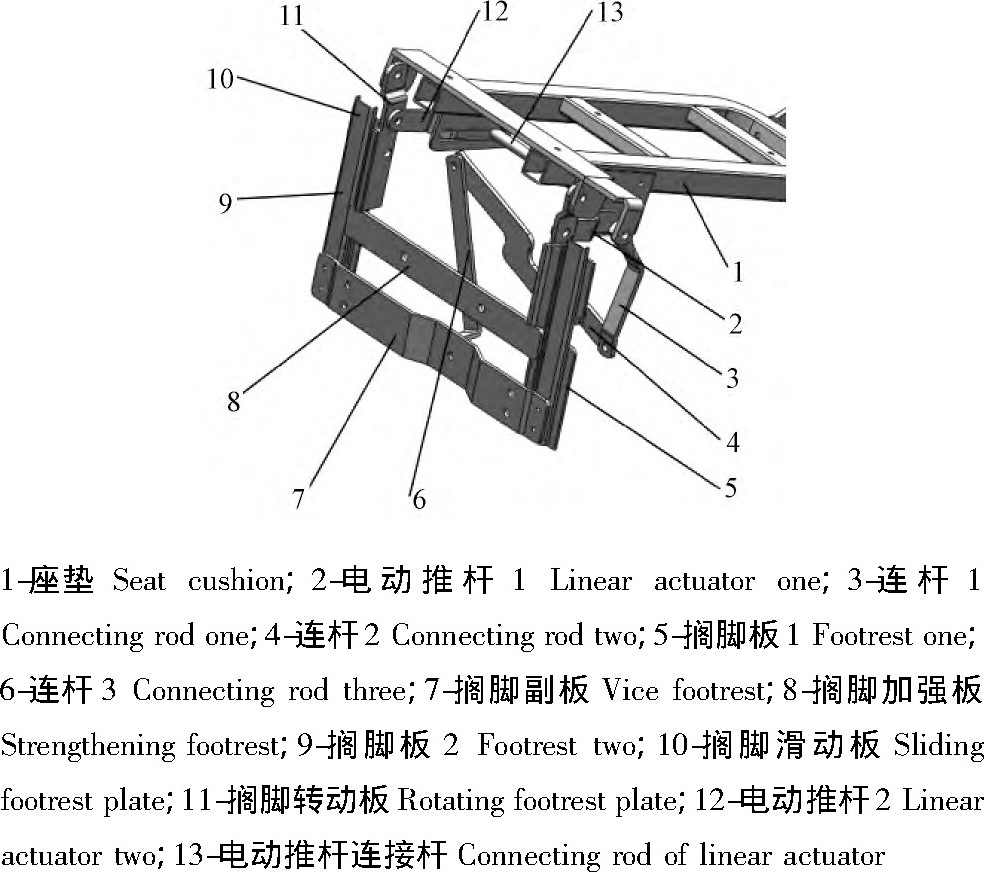
借鉴上诉的搁脚板翻转展开形式, 并在此基础上, 将联动杆作为驱动的电动推杆, 使传统座椅的双曲柄机构改进成曲柄滑块机构[2], 这样不仅可以实现搁脚板的独立运动, 而且还能将电动推杆向内“收缩”, 从而避免了夹手情况的发生;搁脚板的展开可以不受靠背运动的限制而达到水平的位置, 利于放松小腿;为了解决搁脚板长度不够的问题, 在搁脚板上添加一个由推杆和搁脚副板组成的二级杆组, 其中搁脚副板与搁脚板组成移动副, 电动推杆打开时, 搁脚板的展开与副板的移动能同步进行, 且副板向前移至超过390 mm, 从而达到要求的设计长度, 在收回时, 搁脚板迅速收回且避免了与地面的触碰。通过曲柄滑块机构上添加二级杆组的方式实现了传统搁脚的性能提升, 依照以往设计经验和人机尺寸要求, 将搁脚板长度设定为240mm, 再添加搁脚副板, 经过结构设计获得如图2所示的搁脚机构模型。
三、 搁脚机构运动学仿真
1、 仿真前处理
对于建立的三维模型, 要通过Adams来对虚拟样机[3]的运动性能进行验证, 并为电机的选型提供一定的理论参考。搁脚的运动有展开和收回两个环节, 本文仅对展开过程进行仿真。首先将建立好的模型进行简化, 再将三维模型转换成Parasolid格式导入到Adams中, 设置好重力场、材料名称及属性等, 零件材料为普通碳素结构钢Q235, 根据实际运动情况创建各相邻构件之间的运动副。
图2 总体结构模型Fig.2 Total structural model
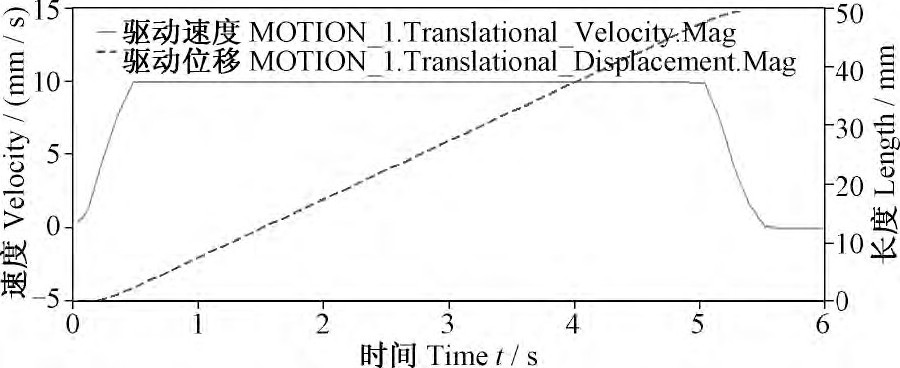
在电动推杆与座框的移动副上添加驱动, 通过研究电动推杆的运动特性可知, 其运动过程几乎是匀速的, 只是在启动和停止的0.5 s存在加速度。初选搁脚电机行进速度为10 mm/s, 运行时间为5.5 s, 在0s~0.5 s内电机由启动快速加速到10 mm/s, 接下来0s~0.5 s的时间内电机将以10 mm/s的速度匀速行进, 当5 s时刻接收到停止信号时, 电机将在0.5 s的时间内停止下来, 整个行程50 mm.选择Adams中的STEP函数[4]来定义推杆的驱动, 运行速度函数为step (time, 0, 0, 0.5, 10) +step (time, 0.5, 0, 5, 0) +step (time, 5, 0, 5.5, -10) , 运行的位移及速度曲线如图3所示。
图3 驱动运行的速度位移曲线Fig.3 Speed curve and displacement curve of driving
根据测试标准BIFMA X5.1-2011要求, 搁脚在伸出的过程中, 在未与人体小腿接触的这段时间内, 搁脚不分担人体重力, 当转至一定角度时, 搁脚与小腿接触, 此时原本由坐面承担的力有一部分逐渐向搁脚转移, 搁脚受力逐渐增大。搁脚在0 s~1.8 s的过程中受力为0, 而在1.8 s~3.2 s过程中受力逐渐增大到200 N, 3.2 s~5.5 s的这段时间小腿与地面脱离, 小腿重力全部由搁脚承担, 所以受力为200 N至最后, 赋予其施力函数step (time, 0, 0, 1.8, 0) +step (time, 1.8, 0, 3.2, 200) +step (time, 3.2, 0, 5.5, 0) .
2、 仿真后处理及仿真结果分析
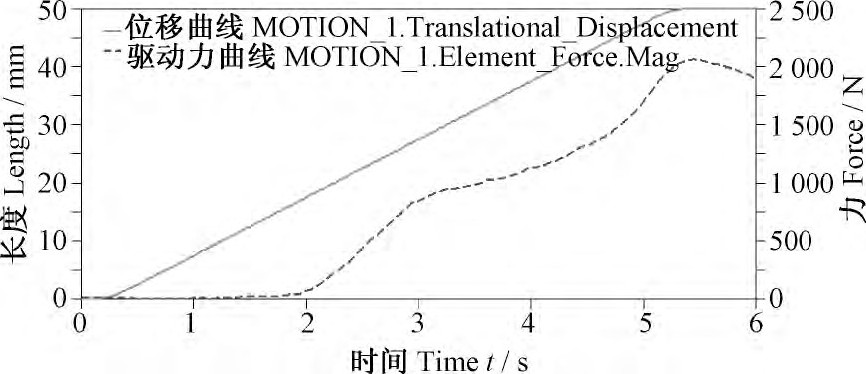
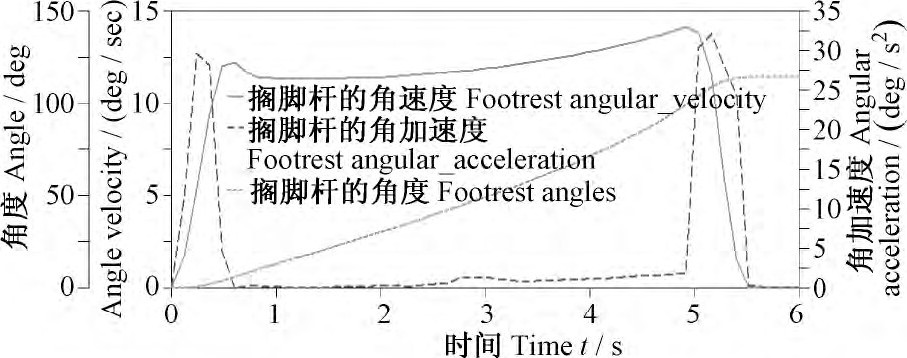
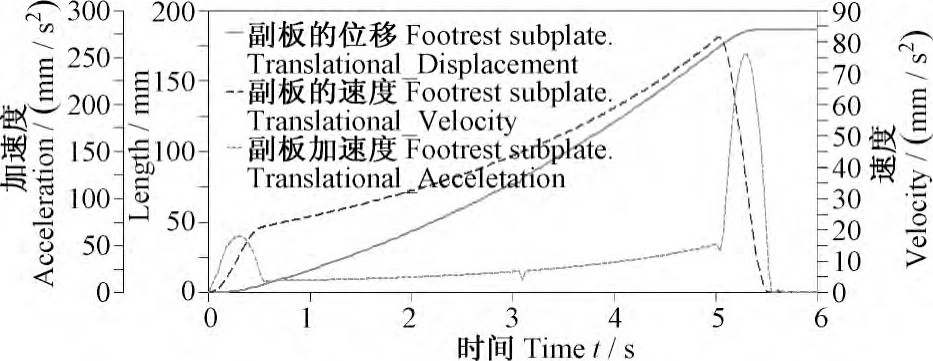
通过仿真得到驱动力和位移曲线如图4所示, 搁脚杆角度、角速度和角加速度曲线图5, 搁脚副板运动速度、加速度曲线如图6所示。
图4 驱动力和位移曲线Fig.4 Driving force curve and displacement curve
图5 搁脚杆的角度, 角速度, 角加速度曲线Fig.5 Angles, Angular_Velocity and angular_Acceleration curve of footrest
图6 搁脚副板运动位移、速度、加速度曲线Fig.6 Angles, Angular_Velocity and angular_Acceleration curve of vice footrest
从图4可知, 在电机运行50 mm期间, 从小腿接触搁脚开始, 电机所受载荷逐步上升, 且没有载荷突变情况, 最大负载为2 000 N左右, 这为电动推杆的选型提供重要依据。由图5可知, 搁脚杆旋出的角度约为120°, 最大的角速度不到15 deg/s且角加速度在起始与结束的0.5 s时间内有突变的情况发生, 分析知是由于电机的启动与停止引起的, 而且突变是在短时间内发生且未出现重大突变, 是在人体可接受的范围内, 可认为搁脚杆翻转平稳顺畅。分析搁脚副板运动图像 (图6) 可知:副板运动最大位移为190 mm, 加上搁脚板长度240 mm, 最大伸展长度可达430 mm, 且在搁脚板转至最低处时, 结合图5、图6观察可知, 副板伸出量不到50 mm, 未接触地面, 因此, 搁脚板的设计符合人机尺寸要求。副板运动速度平稳, 没有冲击, 满足运动平稳性。
四、 机构有限元分析
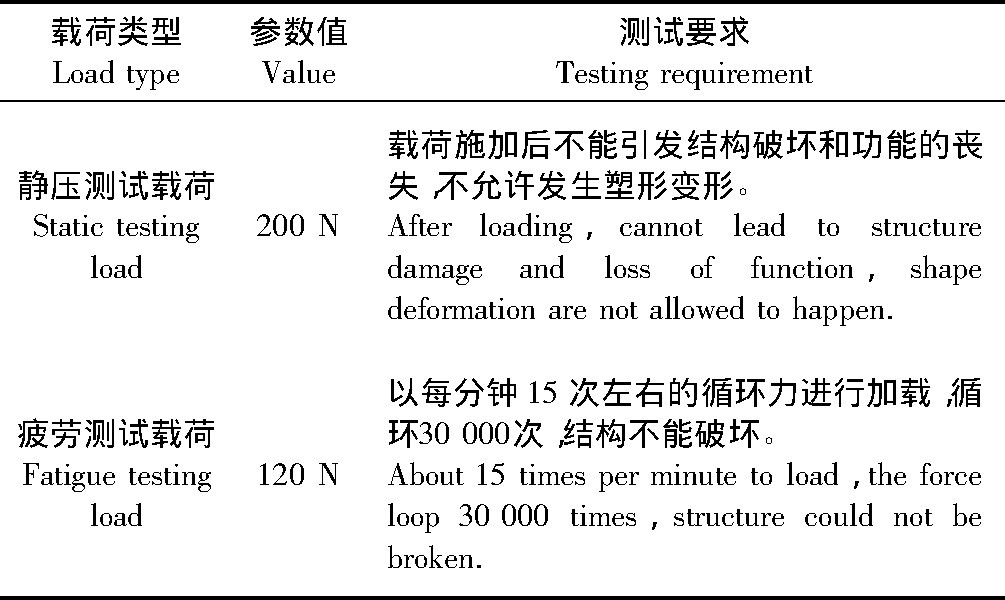
搁脚机构除了需要满足一定的人机尺寸和运动平稳性要求, 还需要满足行业标准规定的强度及刚度要求。搁脚属于经常活动的机构, 按照用户对搁脚机构的使用情况以及BIFMA测试标准, 主要对样机进行静压强度测试及疲劳强度测试, 测试载荷的主要类型、参数值及要求如表1.
表1 测试载荷的具体内容Tab.1 The content of the test load
1、 结构静力学分析
结构静力学分析主要用于分析结构在静载荷作用下的位移、应力、应变等响应的, 它不考虑惯性和阻尼的影响, 其矩阵方程[5]如下
式中, δ-总体位移列阵;
K-总体刚度矩阵;
R-总体载荷列阵, 结构静力学分析时为常量。
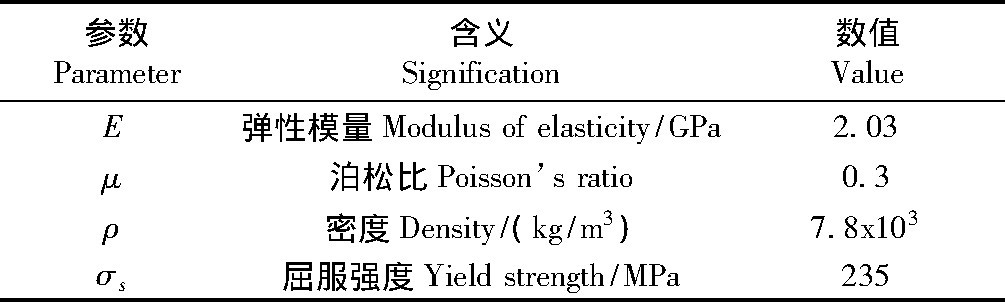
针对样机测试中的静压强度测试, 首先将模型简化, 再导入到Ansys workbench中的Static Structural模块, 定义结构的材料属性如表2.定义接触类型[6]:搁脚滑动板与搁脚板之间有摩擦且发生相对滑动, 接触类型设定Frictional;搁脚转动板与搁脚板之间没有相对运动, 设置为Bonded;存在转动副的构件之间设置为No separation.然后进行网格划分, 并对模型施加约束, 依照测试要求, 将坐面施加固定约束, 对搁脚最前缘危险部位施加200 N载荷, 由于BIFMA测试标准中考虑了安全系数的影响, 因此, 可用材料的屈服极限[7]来衡量有限元分析的结果, 仿真后得到等效应力和整体变形云图如图7所示。
表2 材料属性Tab.2 Material Properties
图7 搁脚机构的等效应力及变形云图Fig.7 Equivalent stress and total deformation contours of the footrest
根据仿真结果可以看出, 机构的最大等效应力为190.54 MPa, 小于材料的屈服强度, 最大变形量为1.57 mm, 存在较小的弹性变形, 不会发生塑性变形, 这说明机构符合静压强度测试要求。
2、 搁脚机构疲劳分析
根据之前的静压测试仿真结果可知, 机构在200 N的载荷下不会失效, 因此在疲劳载荷120 N的作用下, 应力值也不会超过材料的强度极限, 但在持续的交变载荷的作用下结构可能会有疲劳破坏, 所以需要对机构进行疲劳分析。
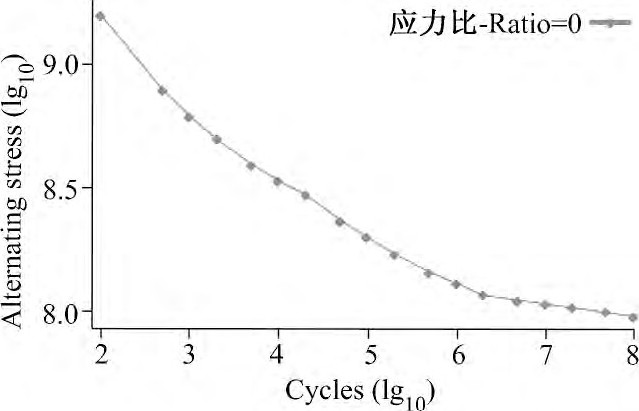
分析疲劳测试要求可知, 测试载荷为脉动循环载荷, 交变应力的循环特征为0, 搁脚所受的循环应力比其极限强度小, 当载荷重复次数超过105后才会发生疲劳, 属于高周疲劳, 采用应力疲劳 (stress-based) 理论[8].在添加疲劳工具Fatigue Tool前还要输入材料的应力-寿命 (S-N) 曲线 (图8) .
图8 材料的S-N曲线Fig.8 S-N curve of the material
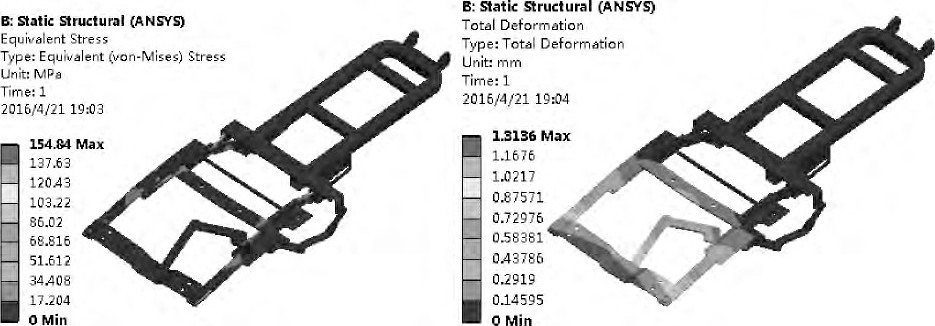
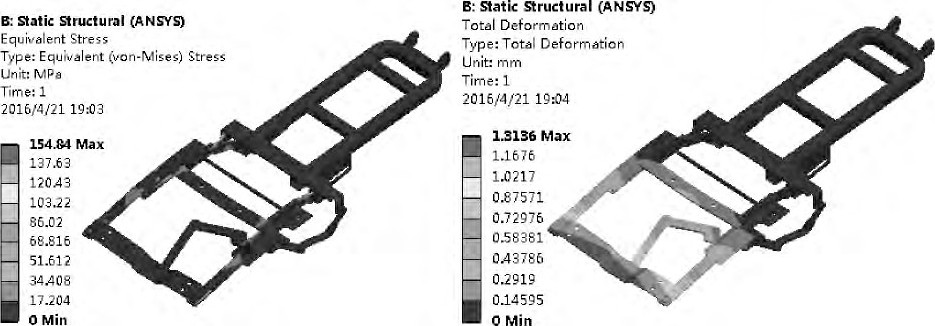
尽管疲劳与循环或重复载荷有关, 但使用的结果却是基于线性静力学分析, 而不是谐分析, 首先进行静力分析得到应力分布及变形云图如图9所示。结果显示最大等效应力为154.84 MPa, 低于材料的屈服极限, 最大变形量为1.31 mm, 满足刚度要求。
图9 搁脚机构的等效应力云图及变形云图Fig.9 Equivalent stress and total deformation contours of the footrest
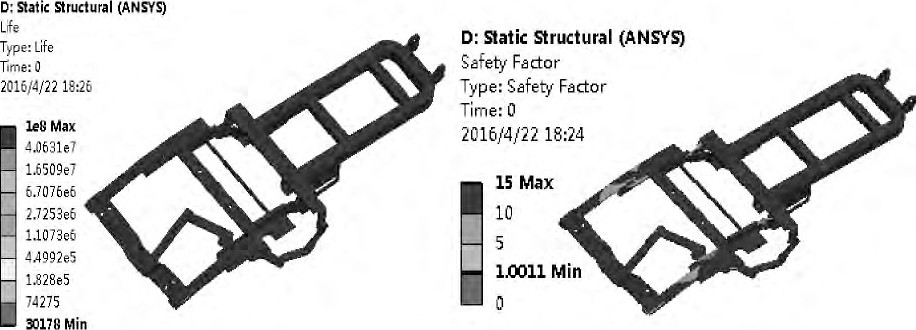
在设置Fatigue Tool参数时, 需要考虑搁脚的构件外形、尺寸因数和表面质量的影响, 不同的加工方法和表面热处理也会明显的影响搁脚机构的持久极限, 设置强度因子为0.8.测试标准要求循环加载次数为30 000次, 设置设计寿命输入30 000次, 比例因子为2, 并采用Goodman应力修正模型, 添加疲劳寿命云图和安全系数云图, 运行求解得到结果如图10所示。
图1 0 搁脚机构寿命分布和安全因子云图Fig.10 Life and safety factor contours of the footrest
由仿真结果可知, 机构的活动关节处是疲劳寿命最薄弱的地方, 但也达到了测试要求, 寿命均在30 000次以上, 机构寿命为30 000次的安全系数也大于1, 这表明该搁脚机构的强度和刚度在疲劳测试载荷下是可靠的。
五、 实物样机试验
根据之前的理论研究, 制作实物样机, 考虑到实物与设计模型会有一定的误差, 为了尽可能的模拟样机的实际受力环境, 在完成铁件部分制作后, 还应完成外观软包加工, 最后在浙江某椅业测试中心进行样机力学性能测试。
1、 搁脚静压测试
在静压测试时, 将座椅的五星脚固定, 并用牵引绳将座面拉牢, 然后将搁脚机构完全展开, 在搁脚板前端处逐渐施加200 N垂直向下的静压力, 并保持30 s, 然后移除载荷。测试如图11所示。
测试结果显示, 搁脚机构并未发生较大的变形, 且在测试之后搁脚功能完好, 因此, 测试用过。
图1 1 静压强度测试Fig.11 Static strength testing
2、 搁脚疲劳破坏测试
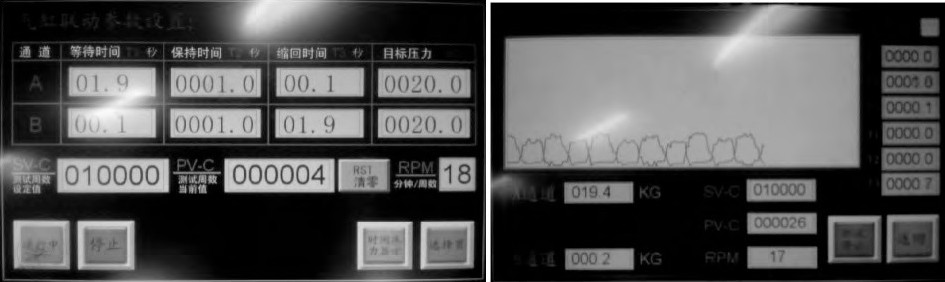
搁脚机构通过静压测试之后, 还需进行疲劳强度测试, 首先以同样的方式将座椅固定, 在搁脚板前端上表面施加120 N, 以每分钟20次左右的频率间歇性加载30 000次。疲劳测试动态界面如图12所示。
图1 2 疲劳测试动态界面Fig.12 Dynamic fatigue test interface
测试结果显示, 样机结构无明显损坏, 机构完成测试后, 搁脚收回时存在些许不流畅, 但功能没有丧失, 测试通过。
六、 结语
本文依据人机工程学原理设计了一款可自动伸展与回收的总裁椅用电动搁脚机构, 在三维模型的基础上, 运用Adams软件进行虚拟样机的运动学仿真, 验证了机构满足人机尺寸要求和运动平稳性要求。基于Ansys workbench环境对机构的静强度、疲劳强度和刚度进行仿真分析, 结果表明机构的力学性能能达到BIFMA测试标准。制作出实物样机并试验, 测试结果满足要求, 验证了理论研究的准确性。
参考文献:
[1]王继承。产品设计中的人机工程学第二版[M].北京:化学工业出版社2013:10-46.WANG Ji Cheng.Ergonomics in the design of products[M].Beijing:Chemical Industry Press, 2013:40-46 (In Chinese) .
[2]孙桓, 陈作模, 葛文杰。机械原理[M].北京:高等教育出版社, 2006:123-157.SUN Heng, CHEN Zuo Mo, GE Wen Jie.Mechanical principles[M].Beijing:Higher Education Press, 2006:123-157 (In Chinese) .
[3]黎育红, 聂凌霄。基于ADAMS虚拟样机的多体系统动力学仿真[J].武汉大学学报, 2010, 43 (6) :757-761.LI Yu Hong, NIE Ling Xiao.ADAMS virtual prototype-based multibody system dynamics simulation[J].Journal of Wuhan University, 2010, 43 (6) :757-761 (In Chinese) .
[4]刑俊文, 陶永忠。MSC.ADAMS/VIEW高级培训教程[M].北京:清华大学出版社, 2004:33-58.XING Jun Wen, TAO Yong Zhong.MSC.Adams/VIEWSenior training tutorial[M]Beijing:Tsinghua University Press, 2004:33-58 (In Chinese) .
[5]高耀东, 宿福存。ANSYS workbench机械应用精华30例[M].北京:电子工业出版社, 2007:267-322.GAO Yao Dong, SU Fu Cun.ANSYS workbench Mechanical application of essence of 30 cases[M].Beijing:Electronic Industry Press, 2007:267-322 (In Chinese) .
[6]陈德民, 张宏, 蔡青格, 等。车用磁流变离合器设计与性能实验[J].机械强度, 2016, 38 (01) :049-053.CHEN De Ming, ZHANG Hong, CAI Qing Ge, et al.Design and performance test of automative magneto-rheologicial fluid clutch[J].Journal of Mechanical Strength, 2016, 38 (01) :049-053 (In Chinese) .
[7]毕运波, 董辉跃, 柯映林。航空铝合金薄壁件加工变形有限元仿真与分析[J].浙江大学学报, 2008, 42 (3) :397-402.BI Yun Bo, DONG Hui Yue, KE Ying Lin.Finite element simulation and analysis of deformation in machining of aeronautical aluminum alloy thin-walled workpiece[J].Journal of Zhejiang University, 2008, 42 (3) :397-402 (In Chinese) .
[8]赵福星, 史海秋, 耿中行。一种适用于应力疲劳和应变疲劳的通用寿命模型[J].航空动力学报, 2003 (1) :140-145.ZHAO Fu Xing, SHI Hai Qiu, GENG Zhong Xing.General life model adapted to both stress fat igue and strain fatigue[J].Journal of Aerospace Power, 2003 (1) :140-145 (In Chinese) .