24Сʱ���Ķ�������
24Сʱ���Ķ�������
����ժҪ�����ڼ�����ij�����ʻ��ƫ��ά�����IJ�������, �о��������ԭ��������ṹ����, ������Ӱ��������Ŀ�������, ̽���˼�С�������ķ���.������������������ʵ����Ҫ������ϵͳӲ�������������, ������һ���ڶ�ά������������ʻ��ƫ�����Զ�����ϵͳ.ͨ���Բ��Է����ĸĽ����Բ������ݵķֲ㴦������С�������, �Բ��Ե�������������㹤ҵ�����ֳ�����ƫ����ϵͳ�ĸ߾��ȡ���ǿ�ȡ���Ч�ʺͶ�������Ե�����.�������:��ϵͳʵ�������÷ǽӴ�ʽ������ʽ�Զ�����ȷ�����ٵز���������ʻ��ƫ��, ϵͳ�������С��2 cm, ����������������ҵ�����߳�����ʻ��ƫ����Ҫ��.
�����ؼ��ʣ�����; ��ƫ; ������; ��ά����; �����;
����Abstract��The two-dimensional measuring method of vehicle driving wandering was proposed based on the laser ranging, and the testing principle and the general structure scheme were investigated. The possible influencing factors on testing error were analyzed, and the method for reducing testing error was discussed. Based on the actual need of online testing of offline vehicles, the system hardware and software were designed, and the online automatic testing system was developed. The test error was reduced by the improved test method and the hierarchical processing of test data, and the logical control of test points to the system was used to meet the demand of industrial test site with high precision, high strength, high efficiency and multi-task test. The results show that the system with non-contact measurement method can realize automatic, accurate and rapid measurement of vehicle driving wandering. The test error of the system is less than 2 cm, which can meet the requirements of automobile manufacturer's wandering detection.
����Keyword��automobile; driving wandering; laser ranging; two-dimensional parameter; online testing;
����ά������ֱ����ʻ���ִ������Ļ���Ҫ��, Ҳ���г���ȫ����Ҫ��֤.Ȼ��, ���������������װ����������в��ɱ���ش���һ�����, ��˴������������������ܻ����ٲ��ִ�����ʻ��ƫ����[1-4].Ŀǰ, ���ڵIJ����������쳧���Ѿ�ʹ�û�������ͼ��ij�����ʻ��ƫ���߲���ϵͳ[3-4]���������߳�������ƫ��, ���ص����豸�ṹ�Ƚϸ���, ��װ�����ԡ��궨��ά���Ƚ�����, �ɱ�Ҳ�ϸ�.���, �����ڼ�����ij�����ʻ��ƫ��ά�����IJ�������, �о������ԭ��������ṹ����, ����Ӱ��������Ŀ�������, ̽�ּ�С�������ķ���.
����1 ��ϵͳ������Ӳ����ɼ�����
����ϵͳ����������ɼ�������ͼ1��ʾ, ������Ӳ����Ҫ�����������ܵ���������3������ϵ�6�����Ե�Ԫ��3����ʽ��翪�ء�3��AP (�����źŽ����) �����.
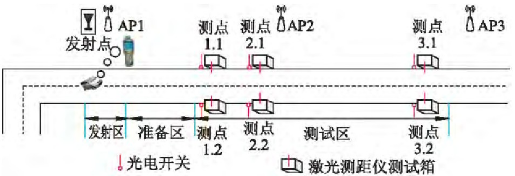
ͼ1 ������Ӳ������ͼ
����2����ά��������ԭ�����㷨
����2.1�����Զ�ά����ϵ�Ľ���
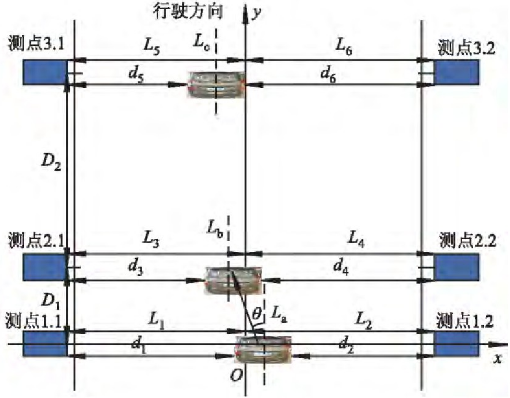
����ϵͳ��ʼ��װʱ, Ҫ��ÿ������м�������λ��У, ʹ��ÿ����ļ�����������ļ����ڿռ�������ȫ�غ� (Ϊ�˱�֤�������ݵ�һ���Լ�ȷ��) .����������λ�ù̶���, �ҳ����Ե�·�������߲��Դ�Ϊ������y������, �Բ��1 (����1����) ��2���������Ƿ����ļ�������·��ͶӰ�õ����߶�Ϊ������x������, ���·�����ߵĽ���Ϊ����ԭ�㽨����ά��������ϵ[5].������ʵ�ʹ���Ӧ�ü��豸��ʼ��װ�����к��ѱ�֤������֮������λ����ȫ��ȷ, ���Գ�ʼ��װ��ɺ�Ҫ���豸���б궨, ������ÿ����ȷ������.����ԭ����ͼ2��ʾ, �Dz��1.1 (��1�����п�����·���IJ��) ����Ϊ (-L1, 0) , ���1.2 (��1�����п�����·�Ҳ�IJ��) ����Ϊ (L2, 0) ;���2.1����Ϊ (-L3, D1) , ���2.2����Ϊ (L4, D1) ;���3.1����Ϊ (-L5, D1+D2) ;���3.2����Ϊ (L6, D1+D2) .
ͼ2 ����ԭ��ͼ
����2.2������ԭ�����㷨
����������ά��������ϵ��, �����Գ�������ͨ�������ʱ, ���Եõ�3�� (��6��) ����ֵ (�þ���ֵ��ͨ���ɼ����ɼ����������ǵĵ������ݲ��ڳ����м��㴦���õ���) , �ֱ�Ϊd1, d2, d3, d4, d5, d6.�Բ��Գ�����y�᷽�� (����ǰ������) �ij���������Ϊ, ����ͨ�������ʱ������ (����ά��������) �ֱ�ΪV1 (La, 0) , V2 (Lb, D1) , V3 (Lc, D1+D2) .��ͼ2��֪, ���ø������Ҳ��IJ������ݿɵò��Գ���ʻ�������ʱ������Ϊ
������ʵ�ʲ�����, ��������������IJ��ʱ, �ܻ���y�᷽���и��нǼ�ʻ���, ����θ.��D1≈5 m, ��ƫ������������Ϊ50~90 km·h-1, ����Գ����ɲ��1ʻ����2����ʱ��Ϊ0.20~0.36 s.���ڸ�ʱ���С, ��������:���Գ����ɲ��1ʻ����2ʱ, ��x���ϵ�λ�����ɸó���������1ʱ��ʻ����������, ������������ζ�ʱ���ڳ�����ƫ������x������ı仯.��ͼ2�ɵ�

�������Գ���������1ʱ��ʻ���Ϊ

������֪�ų���ʻ��ǶԲ��Գ�����ƫ����Ӱ��, �ɵ�����ƫ��Ϊ

����3�����Ծ���Ӱ�����ؼ���Ӧ��������
����ϵͳ����������Ҫ�뼤�����ǵIJ��������Լ����ݲɼ��봦��Ӳ/�����ľ����й�.��Ҫ��ȡһ���IJ�����������֤���Եľ���.
����3.1���������ǵIJ������ȷ���
����Ӱ�켤�����Dz���������Ҫ�����ڲ����غ��ⲿ����.�����ڲ��������������������ڲ����Ե�Ԫ������Ӧ�ṹ����֤��, ���Ҫ��������Ӱ����������ȵ��ⲿ����.�ⲿ������Ҫ�뱻���������б�Ƕȡ�������������ʹֲڶȡ������������ɫ�й�[6].�������߳�����������ɫ���������ʹֲڶ��ǹ̶���, ��Բ�������Ӱ���С, ����ͨ������궨��������, �ʶ���2��Ӱ�����ز����������.
������ʵ�ʲ����б����������б�̶ȶԲ������ȵ�Ӱ��ϴ�.�����������б��ָ�ڹ�㴦����ķ��߷����������ķ����غ�, ��нdz�Ϊ��б��.���ű����������б�ǵIJ�ͬ, ��������������ɢ���ռ�ֲ��������仯, �Ӷ����½������ڵ�λ����ǡ���λʱ���ڽ��յ��Ĺ����������仯, ��͵��²���ֵ��ʵ��ֵ��һ��ƫ��.���������������ص�:��λ��һ��ʱ, ��б������������б�ǵ����������;����б��һ��ʱ, ��б����������λ�Ƶ����������[7].���, ���ڼ������ǵIJ������ȶ���, ��Ҫ���ڶ�Ӧ��㴦�ij�����������б�ǵĴ�С�Լ�����������λ�ƵĴ�С.
����3.1.1��ʻ��ǶԲ��Ծ��ȵ�Ӱ��
������ʵ����ƫ������, ���Գ���ʻ����ʱ�ܻ����һ����ʻ��� (�ܼ�ʻԱ�����������������ص�Ӱ��) , ������������ƫ�����㷨���ų���ʻ��Ƕ���ƫ����Ӱ��, �������ڳ���ʻ���Խ��, �����³������������бԽ��������б��Խ��, ����ʹ�ò��������Խ��[8];������һ��, ���ȿ���ͨ������궨��������, ��ξ���Ҫͨ����С���Գ�����ʻ�������С�������.
����3.1.2��������λ�ƶԲ��Ծ��ȵ�Ӱ��
����������ʵ����ƫ�����в��Գ���ʻ�����ʱ�����һ������б��, ����б��һ��, ��б����������λ�Ƶ����������.���Գ���ʻ����ǰ�ᴥ����ǰ����Ӧ�Ĺ�翪��, �Ӷ������������ǽ��в���, �������еĵ����ɼ�����ɼ���ʱ�������ǵĵ��������źŲ����䴫������, ��������������㴦����õ���Ӧ�ľ���ֵ������ֵ.�������ǵIJ����ٶȼ�����ʸߴ�3 k Hz, �ֽ��ɼ����IJ���������Ϊ1 k Hz.���ڳ�����x�᷽���ϵ�����ֵ������ų���������λ�Ƶ����������, ����������ѡ��������������ֵ�IJ�����ԽСԽ�� (���Ǽ���������dz�����ijһ�̶���) , Ȼ�����Գ����ڲ���������ʻ�ٶ�Ϊ50~90 km·h-1, ����������Ϊ4 m, ������ͨ����������ʱ�� (���ڹ�翪�غͼ������ǵľ���ܽ�, ����ʱ��ʱ���Խ�����Բ���) Ϊ0.159~0.288 s, �����ʱ����, �����ϲɼ��������ݵ���Ϊ159~288������Ӧ�ľ���ֵ����Ϊ159~288��.��˼�������ȡ��������������ij�̶��㴦��Ӧ������ֵ, ��ֻ��ѡȡ������ijһ�����Ӧ�IJ���������Ϊ����x������ֵ�ļ���ο�ֵ.�ֽ������������Ϊ3���� (�Ⱦ��) :��ͷ����������β, ��ÿһ���ֶ�Ӧ�����ݵ���ӦΪ53~96��.���ڳ�ͷ�ͳ�β��λ�����ͽϴ�, ���ҵ��������ڳ�����ʱ (�������ǵIJ�������·��Ĵ�ֱ����ԼΪ80 cm, ���յ����Գ���ǰ�յ�) , ��ʱ������������������Ӧ�ľ���ֵ, ���������ֱȽ�ƽ��, �����ڲ������С, �ʺ���Ϊ�����������������.��ѡ�������������ݵ�������, ���п��ܻᵼ�²������ƫ��.����, ѡȡ���Գ���ͨ�����ʱ�ɼ�������Ч���ݵ��ж�Ӧ�ڳ��������ǰ50������Ϊ�����������ο���.
����3.2�����ݲɼ��봦�����ֵľ��ȷ���
����ϵͳ���ݲɼ��봦�����������Ҫ����ϵͳ��̬�궨ʱ����������Լ���̬����ʱ���������.
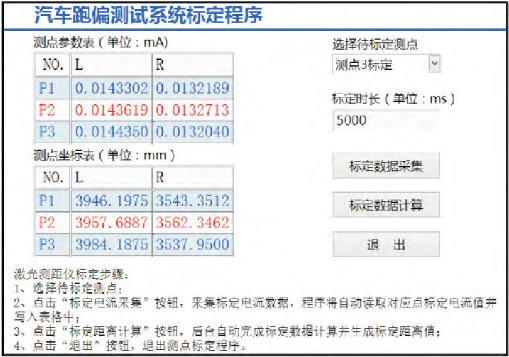
����3.2.1��ϵͳ��̬�궨��������
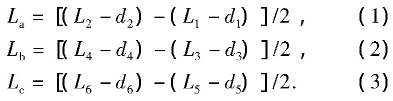
����ϵͳ��װ��ɺ�, Ϊ�˱�֤���Ծ���, ����Ҫ�������ڲ������Ķ�ά�����¸����ȷ������ֵ (����ά����) , ���DZ��ϲ������ȵ�ǰ��.�궨������ͼ3��ʾ.
ͼ3 ϵͳ�궨ʾ��ͼ
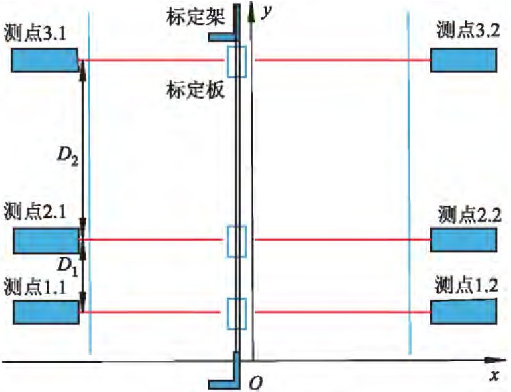
������2���궨��[9]�������ܵ����������ҷֱ�λ�ڲ��1�Ͳ��3����, �����˱궨��������2����˿�� (�γ�һ����ƽ��) , ��3��궨��ͨ��ϸ�߹��ڸ�˿�����ҷֱ������3����㴦 (�ڿ�ʼ�궨�ȶ�ÿ�����������༤�����ǵ�λ�ý���У, ʹ���༤���ڿռ����غ�) , ͨ������ˮƽ�ǵ����궨�ܺͱ궨���λ��, ʹ�궨������ƽ����·�洹ֱ��ͶӰ��·���ϵ��߶����·�������غ�.���ڱ궨���������Ϊ3.0 mm, ���Ա궨����ʱ�����x����������Ӧ����1.5 mm.��������ʼ�궨�����Ķ�ά����ֵ (������y����ͨ���ֹ�����) , �����������б궨����, ��ͼ4��ʾ.���ձ궨�����˵�������������, ���ɵõ������ı궨����, ͬʱ���������ǵ���ʾ����Ҳ����ʾ����Ӧ�ľ���ֵ.�궨�����ͼ4��ʾ, ��֪ϵͳ��̬�궨���������� (ͨ�����ݲɼ��봦���õ�������) �������±1 mm����.
ͼ4 �궨�������ͼ
����3.2.2��ϵͳ��̬������������
�����趨�������ǵ����Ϊ������ģ�������, ������Ϊ�����ֵ�����.�������ǵ�MF (multifunctional) �����������翪�ؽ��ն� (��翪���dzɶ�ʹ�õ�, �ɷ���˺ͽ��ն����) ���ź����������, ϵͳ���Թ����е���翪��δ������ʱ�������Ǵ��ڴ���״̬, �����о������, ��ʱ����ģ�������ֵΪ20.5 m A;����翪�ر�����ʱ, �������Ǵ��ڿ���״̬, ��ʼ�������, ��ʱ�����Ծ���С�ڼ��������趨�IJ�����Χ����Сֵ, �����ģ�������ֵΪ3.5 m A;�����Ծ�������趨�IJ�����Χ�����ֵ, �����ģ�������ֵΪ20.5 m A;�����Ծ������趨�IJ������뷶Χ��, �����ģ�������ֵΪ4.0~20.0 m A, ��Ϊ��Ч����ֵ.����ǵIJ�����ΧΪ200~30 000 mm�ɵ�, �����������Ĺ�ϵʽΪ

����ʽ��:dΪ����, mm;IΪ����, m A.
������ʽ (7) ��֪, ϵͳ��̬���������Ҫ�ɸ�����Ч���� (4.0~20.0 m A��Χ�ڵĵ���ֵ��Ϊ��Чֵ) �������ΔI (�ɵ����ɼ��������������ڲ���·���������) �Լ���Ч�����������岨���ϴ��µ���� (�ɼ������Ƕ�̬����ʱ���������) ����.
�������ڵ�����Ч��������I�����ΔI����, Ҫʹ���С�Ƚ����� (���Ǹ������߾��ȵ�Ӳ��, ��ͬʱ�ɱ�Ҳ��������) , ���������ľ���ͨ�����ݴ����ķ����������پ���ֵd�����Δd.���ڼ������ǵ���Ч����ģ���������Χ��4.0~20.0m A�̶�, �����Ӧ�IJ�����Χ200~30 000 mm�ɵ�, ��Δd=1 862.50ΔI, ��������ϵͳ����Ҫ���ǰ����, �������������Dz�����Χ����СһЩ, ���������С.���������ǵIJ�����Χ����Ϊ500~6 000 mm (�ò�����Χ�Ǹ��ݲ���ά�����趨��) , �����������Ĺ�ϵʽΪ

������ʱΔd'=343.75ΔI, ��ΔIһ���������, ʽ (8) �������Δd'���Ա�ʽ (7) �м������ΔdҪС, ����������С.
����ѡȡ���Գ���ͨ�����ʱ�ɼ�������Ч�������ݵ��ж�Ӧ�ڳ������������ǰ50�����ݵ���Ϊ�����������ο���, ������ȡ�ӳ����ͼ��ͼ5��ʾ.
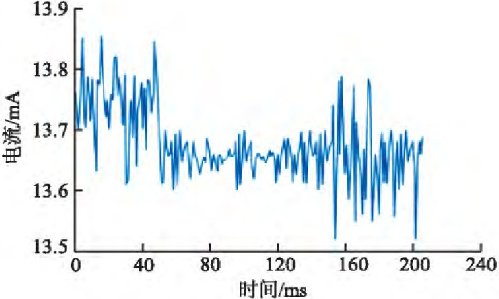
�������Բ��1.1�ļ������ǵIJ�������Ϊ���ݽ��з���, ���Գ��������ò��ʱ��������ȡ����ɼ�������Ч����������ͼ6��ʾ.���ɼ���207�����ݵ�, ���ճ����е��㷨, ��ȡ������Ч���ݵ㼴�Ǵӵ�69�����ݵ㵽��118�����ݵ�, ��ͼ6���Կ����м�ε�����������˵����ݸ��ȶ�.
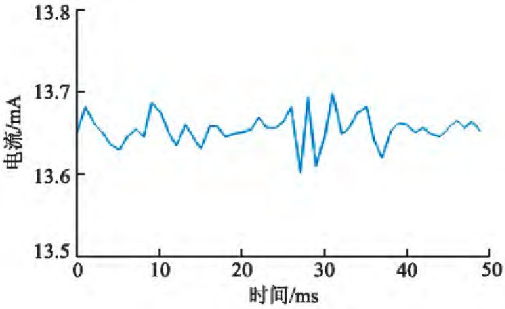
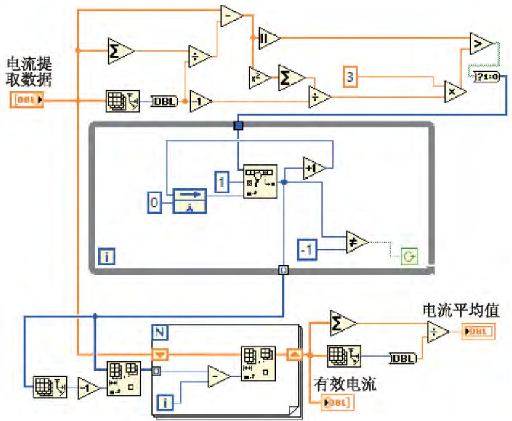
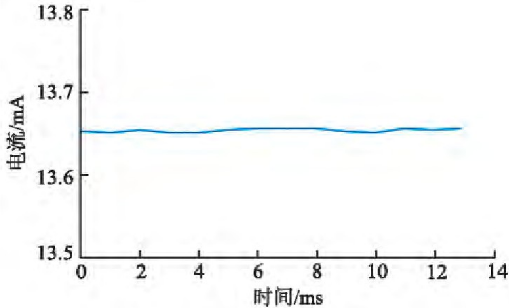
������ȡ���ĵ���������ͼ7��ʾ, ��ȡ���ĵ���Ϊ (13.65±0.05) m A, ��Δd'=343.75ΔI��֪, ��ʱ�ľ������ΪΔd'=±17.19 mm.��ʱ�������������Ҫ��, Ӧ����ȡ����Ч�����������ݴ���.���ݴ������ӳ����ͼ��ͼ8��ʾ.
ͼ5 ������ȡ�ӳ����ͼ
ͼ6 ��Ч��������ͼ
ͼ7 ��ȡ�ĵ�������ͼ
ͼ8 ���ݴ����ӳ����ͼ
�������ݴ�������: (1) �������ƽ��ֵ��d, ������в�Δi=di-��d, i=1, 2, …, n; (2) �����ƫ��Ĺ���ֵe; (3) �б�ִ����, ��|Δi|≥3eʱ, ��������Ӧ�ĵ�������ֵ; (4) ��ʣ�µ���Ч��������ȡ����ƽ��ֵ��Ϊ�ò���������ֵ�ļ���ֵ.�����ݴ�����������õ��ĵ���������ͼ9��ʾ, ��ͼ7���, �õ��ĵ������ݸ��Ӿ�ȷ.
ͼ9 ������ĵ�������ͼ
����4��ϵͳ�������Ʒ���
����4.1��ϵͳ�������Ʋ���
����ϵͳ�IJ�������:����Ա��ʻ���Գ���������ƫ�����ܵ�, ��ʻ������źŷ�����ʱ�����ֳ��ն�����Ӧ�IJ����źŷ��ͼ�, �ֳ��ն���ͨ��ϵͳ�����߾������������������Ӳ����������Ͳ����ź�[10], �������յ������ź�ʱ���������, ���Գ�������ͨ��3����, ������������Խ�������䷢���ֳ��ն�.
����Ϊ�˱�֤��̨�������в���ʱϵͳ������ֲ�����Ӧ�����������ݻ��ҡ��ֳ��ն˽��ղ������Խ��������, ������Ʋ���: (1) ���ó�������Ķ��к���ʹ�ֳ��ն˷��͵IJ����ź������Լ��������Ӧ�������ݰ����Ⱥ�˳������кͳ����� (�����ȳ�, ������) , �������ܱ�֤��̨��������ʱ�����ܿ�����Ӧ��ÿ̨���������������Զ�������ֲ��Ի���; (2) ������ͨ�ų�����Ϊÿ���ֳ��ն� (���ն˵�IP��ַ��ͬ) ��������Ӧ��IP��ַ���䲻ͬ�����ݴ洢��, �����洢��Ӧ�IJ����ź��Լ����Խ��������.�������ܱ�֤��̨������������ʱ���ֳ��ն˽��յ��IJ��Խ��������ֻ���; (3) �����������źŲ��� (�ֳ��ն˷������ݵ���) ʱ, ���ܻ���ַ���ʧ�ܵ����, Ϊ�˱�֤���������ϵͳ����������, ��ͨ��C#�����������ֳ��ն��źŷ��Ͳ���, ������Ա�����ͼ�֮���ֳ��ն˽���500 ms�ļ��ʱ�䲻�ϵ����������Ͳ����ź�, ֱ�����ͳɹ�[11].�������ܱ�֤����ʧ��ʱ������ʻ���źŷ�������ʱҲ�ܳɹ����Ͳ����źŲ����������IJ���.
������������, ͨ����Ӧ�Ŀ��Ʒ���ʹ��ϵͳ�ڸ���״���¶�����������.
����4.2��ϵͳ����
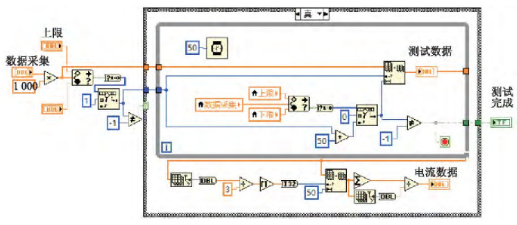
�����ھ���ǰ�ڲ���ϵͳ�Ĵ��, ��������Ҫ�Ը�ϵͳ���в���, ϵͳ�����ܵ���ͼ10��ʾ, ���Ե�Ԫ��ͼ11��ʾ.������������ʻ��������ֱ���˹���������ƫ��, �ʲ��ù켣�� (������Ӧ���ֵĹ켣��) �˹���������ƫ��.�ö�̨���Գ��������������в��� (�˹�����ʱ�Բ�ͬ��ɫ�Ĺ켣�߶Բ�ͬ������������) , �ɲ��Խ�� (ȡ������Ϣ) ��֪, �ò���ϵͳ�ܱ�֤��̨���������������в����Ҳ������С��2 cm, ������ʵ�ʲ���Ҫ��.

ͼ10 ϵͳ�����ܵ�

ͼ11 ϵͳ���Ե�Ԫ
����5������
����1) ÿ������ڲ��Ե�·���������װ1ֻ�����ഫ����, ���Գ�������浽��������װ��ľ���ת��Ϊ�Գ�����������ƽ������������װ�����IJ���, �ɴ˱�������·�治ƽ�����������±��������3�����ʱ3ֻ�����ഫ�����Գ���������IJ�ͬ�����������.
����2) ��ÿ���������õĶ������ݽ��з��ࡢ��ѡ���쳣�������ȴ���, ����С�˲������.
����3) ���õ�1, 2��������ñ������ʻ���У�����Խ��, ��Ч����ʻ��������µIJ������.
����4) ���ö��к���, ��Ч�����������ʻ��ƫ�����Զ����������׳��ֵĶ�������������������Թ���, ����Խ���뱻����Ķ�Ӧ��ϵ���ҵ�����.ͨ�����۷����Լ�����, ��֤�˸�ϵͳ���о��ȸߡ���Ӧ�졢��Ӧ��ǿ���ŵ�, ����ϵͳ������, �����ɱ���ά���ɱ���, ��װ�����Ժ�ά������.��ϵͳ����Ŀǰ���������̾���ʵ������, ����������Ҳ����һ����ʵ�ü�ֵ.
���������
����[1]��ҫ��, ������.���ڽ�����Ӱ����������������ƫ����ϵͳ����[J].�й����̻�еѧ��, 2011, 9 (4) :476-481.HE Y H, LI X F.Vehicle-wandering testing system based on close-range photogrammetric technology[J].Chinese Journal of Construction Machinery, 2011, 9 (4) :476-481. (in Chinese)
����[2]�����, ���˱�, ��, ��.���ڼ�����ij�����ʻ��ƫ����ϵͳ[J].��·������, 2012 (3) :5-7.RONG R B, YAN Y B, FANG Y, et al.Vehicle-wandering testing system based on laser ranging[J].Highways&Automotive Applications, 2012 (3) :5-7. (in Chinese)
����[3]������, ���, ������, ��.����˫Ŀ�Ӿ��ij�����ʻ��ƫ�����Զ����ϵͳ[J].�й���е����, 2015, 26 (1) :130-134.ZHOU X L, LI C, LIU H L, et al.On-line automatic vehicle driving wandering test system based on binocular vision[J].China Mechanical Engineering, 2015, 26 (1) :130-134. (in Chinese)
����[4]�³���, ����, ����, ��.��������ͼ��ij�����ʻ��ƫ���߲�������[J].����ѧ, 2014, 39 (9) :102-106.CHEN C J, WANG G, LIU Y, et al.An automatic automobile deflection measurement method based on digital image[J].Science of Surveying and Mapping, 2014, 39 (9) :102-106. (in Chinese)
����[5]Ǯ��Ԫ, ��ҫ��, �����.������ά�˶���������ϵͳ�����о�[J].�人������ѧѧ�� (��ͨ��ѧ�빤�̰�) , 2016, 40 (2) :365-368.QIAN F Y, HE Y H, SONG P J.Research on the development of non-contact two dimensional automobile running track test system[J].Journal of Wuhan University of Technology (Transportation Science&Engineering) , 2016, 40 (2) :365-368. (in Chinese)
����[6]����.���ڼ���������������ϵͳ�о�[J].��ѧ����, 2002, 24 (2) :7-12.CHEN L.The 3-dimension measuring system based on the laser ranging[J].Optical Instruments, 2002, 24 (2) :7-12. (in Chinese
����[7]���˻�, ������, �Ÿ���.���ڼ�����Ĵ�ߴ����Ӧ���о�[J].�����DZ�ѧ��, 2009, 30 (3) :481-485.QU X H, DAI J F, ZHANG F M.Application study on laser ranging in large-scale measurement[J].Chinese Journal of Scientific Instrument, 2009, 30 (3) :481-485. (in Chinese)
����[8]������.ʻ��Ƕ���ƫ���Խ��Ӱ��ķ����о�[J].�人������ѧѧ�� (��Ϣ��������̰�) , 2015, 37 (5) :438-441.WANG H X.Influence of entering angles on wandering test values[J].Journal of WUT (Information&Management Engineering) , 2015, 37 (5) :438-441. (in Chinese)
����[9]��ҫ��, ����.������ʻ��ƫ����ϵͳ�б궨�ܵ����[J].�人������ѧѧ�� (��Ϣ��������̰�) , 2014, 36 (2) :185-189.HE Y H, XIONG T.Calibration frame in vehicle driving wandering test system[J].Journal of WUT (Information&Management Engineering) , 2014, 36 (2) :185-189. (in Chinese)
����[10]HE Y H, YANG C, SHANG B.Vehicle driving wandering test system based on Lab VIEW[C]��SAE International.USA:SAE Publication Group, Paper Number:2010-01-0998.
����[11]ZHOU Z T, HE Y H, WANG D.Research on wireless communication strategy in online automatic test system for vehicle driving wandering[C]��SAE International.USA:SAE Publication Group, Paper Number:2015-26-0236.