24小时论文定制热线
![]()
24小时论文定制热线
![]()
摘要:为了保障驾驶安全, 设计了基于自适应障碍物识别和目标跟踪的汽车防撞系统。根据激光雷达工作原理, 提出了自适应阈值的最近邻聚类算法用于障碍物识别;根据城市交通实际状况, 提出了基于当前统计模型的自适应Kalman滤波跟踪方法;为了提高驾驶舒适度, 提出了融入驾驶员习惯的预瞄安全距离模型;对车体进行改装后实验, 结果表明的算法能够快速跟踪移动目标, 并且具有很高的跟踪精度;在防碰撞试验中, 设计的主动防撞系统能够在安全距离及时制动车辆, 说明了防撞系统的安全可靠性。
关键词:汽车; 主动防撞系统; 自适应阈值最近邻聚类算法; 当前统计模型; 预瞄安全距离模型;
Abstract:To improve the driving safety, automobile collision avoidance system based on adaptive obstacle recognition and target tracking is designed. Depend on working principle of laser radar, the nearest neighbor clustering algorithm with adaptive threshold used to recognize obstacle. Rely on fact of city traffic, adaptive Kalman filter based on current statistical model is put forward to track the goal. To improve comfort level of driver, driver previewer safety distance model integrated with driving habit is raised. A car is refitted to carry out the trial, the result shows that tracking algorithm can convergence quickly with high precision, which can satisfy the use requirement. In the collision requirement, the collision system can stop the vehicle at safe distance in time, which clarifies safe reliability of the collision system.
Keyword:Automobile; Initiative Collision Avoidance System; The Nearest Neighbor Clustering Algorithm with Adaptive Threshold; Current Statistical Model; Driver Previewer Safety Distance Model;
1、引言
随着道路设施的改善和汽车性能的提高, 汽车的行驶速度大幅提高, 但是随着汽车持有量的增加, 道路状况呈现复杂的景况, 交通事故频繁发生, 造成了巨大的人员财产损失。经分析, 造成交通事故的原因包括酒后驾驶、能见度低、司机误判、跟车距离较近等, 其中司机误判占70%左右。当前汽车的安全保护措施是在事故发生后的被动措施, 研究的汽车防撞系统是在事故发生前的主动保护措施, 通过比较当前车距与安全车距判断车辆应正常行驶还是制动。
目前国内的主动防撞系统研究主要集中在院校和科研院所[1-4]。研究层次还处于理论研究和实验阶段, 并未实现产业化。某大学的研究目前处于领先水平, 它建立了驾驶员模型和人机闭环控制系统模型;某大学研究的THMR-V智能车, 传感器为GPS定位、摄像机视觉、激光雷达测距, 执行机构包括转向、制动等, 部分系统处于国际领先水平。目前国内还没有研发出价格合适的样机, 同时存在虚警率高的问题。
为了进一步推动汽车防撞系统的理论研究, 将防撞系统分解为信息获取、障碍物识别、目标跟踪、安全评估四部分, 使用聚类分析法识别障碍物, 使用自适应卡尔曼滤波跟踪目标, 建立了驾驶员预瞄安全距离模型, 最终构建了汽车的主动防撞系统。
2、汽车防撞系统使用说明与设计
2.1、防撞系统使用说明
设计的汽车防撞系统适用于城市道路条件下, 此时车速一般限制在40km/h以下;在同一条街行驶时, 路面情况变化不大, 路面附着系数较大且变化不大;汽车在行驶过程中没有闯红灯等违反交通法规的行为, 车辆均正常行驶。
2.2、防撞系统设计
设计的汽车防撞系统, 如图1所示。其中, 信息采集包括由激光雷达组成的测距测速系统、由车速传感器组成的自车车速测量系统。障碍物识别使用的是自适应阈值的最邻域聚类算法;目标跟踪使用的是自适应Kalman滤波算法;使用驾驶员预瞄安全距离模型, 用于判断当前车距与安全车距的大小关系, 若当前车距大于安全车距则算法重复, 否则进行制动使车辆减速。
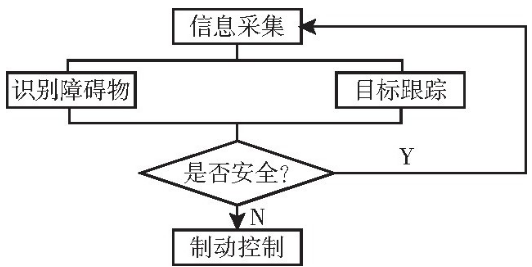
图1 汽车防撞系统设计
3、障碍物识别算法
3.1、最近邻聚类算法
选用的激光雷达对车前物体进行等角度扫描, 所以属于同一障碍物的数据必然连续, 最近邻聚类分析法[5]就是以此为理论依据, 对于距离较近的点认为是同一物体, 距离出现突变的点认为是不同物体。对于激光雷达测得的同一帧数据中相邻的两个数据Pi-1 (xi-1, yi-1) 和Pi (xi, yi) , 其距离记为di, 即:

将两点间距离与阈值dth比较, 若di>dth则认为两点处于不同物体上, 两点不属于同一类;若di燮dth则认为两者在同一物体上, 两点为同一类数据。
3.2、自适应阈值最近邻聚类算法
在最近邻聚类算法中, 阈值dth的选择至关重要。若dth选择较小, 则容易将同一物体的数据归为不同物体;若dth选择较大, 则容易将不同物体的数据归为同一物体。在激光雷达的等角度扫描中, 记其扫描角度为λ, 扫描示意图, 如图2所示。
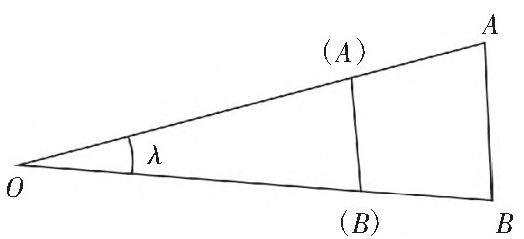
图2 激光雷达等角度扫描
从图中可以看出, 对于等角度扫描, 物体距离O点越远, AB间的距离也越大, 这意味着要根据目标点与测试点的距离自适应地调整阈值dth。记物体与测试点的距离为R, 雷达角度分辨率为λ, 则自适应阈值定义为dth=R*sinλ, 选用的激光雷达角度分辨率为λ=π/360, 属于小角度, 为了简化计算, 将自适应阈值重新定义为:

通过以上算法就可以实现数据的聚类, 但是物体要到达一定尺寸才能成为障碍物, 这就要求同一类数据要达到一定数量, 设定数据量阈值N, 当同一类数据大于N时, 将其确定为障碍物, 当同一类数据小于N时, 此类数据被忽略。
4、目标跟踪
4.1、目标机动模型
目前常见的汽车机动模型包括常速度模型、常加速度模型、Singer模型, 这三种机动模型的运动规律性较强, 不适用于状况复杂的城市交通, 选用的是当前统计模型[6-7]。当前统计模型的主要思想是, 若汽车在当前时刻以某一加速度运动, 那么在下一时刻汽车的加速度只会出现在上时刻加速度某一邻域内, 而不会出现加速度的突变或跳跃。下面首先介绍当前统计模型原理。当前方汽车的加速度方向为正时, 加速度的概率密度为:

式中:amax—正向最大加速度;a—汽车加速度;μ—大于0的常数。
当前方汽车加速度方向为负时, 加速度的概率密度为:

若前方车辆加速度为0, 则其加速度概率密度为蒂利克雷函数, 即:Pr (a) =δ (a) (5)
为了更好地分析当前统计模型, 可以使用matlab画出加速度概率密度曲线, 由于篇幅限制, 在此不再给出, 通过分析可以看出, 汽车加速度的概率密度与当前加速度均值有关, 只要能够计算出汽车当前时刻的加速度均值, 就能够得到汽车的加速度概率密度分布。为了将此模型应用于自适应卡尔曼滤波算法, 下面建立当前统计模型的空间方程。在当前统计模型中, 汽车的加速度为一阶时间相关模型, 其表达式为:

式中:x″ (a) —汽车运动的加速度; —加速度均值;a (t) —均值为0的加速度白噪声;α—激动频率;w (t) —高斯噪声。
由式 (6) 可以推导出:

在当前统计模型中, 选取状态变量 , 选取观测变量Z (k) =[x (k) , y (k) ], 建立当前统计模型的空间方程和观测方程为:

根据式 (6) 和式 (7) 可以给出式 (8) 中的Φ (k) 、U (k) 、H的具体表达式。
4.2、目标的跟踪算法
Kalman滤波利用前一时刻的估计值与当前时刻的观测值, 得到当前时刻的测试结果, 是一种常用的信息融合算法。在Kalman滤波中, 当过程噪声较大时, 说明预测值可信度低, 要增加观测值在输出值中的比重;相反的, 当过程噪声较小时, 说明预测值可信度高, 那么就要增加预测值在输出值中的比重, 因此可以通过过程噪声Q (k) 的大小, 自适应[8]地调整增益矩阵K (k) 。
下面就是给出过程噪声Q (k) 的计算公式就可以实现自适应卡尔曼滤波[9]。在当前统计模型中, 过程噪声Q (k) 为:

式中:Qx (k) 、Qy (k) —汽车X、Y方向上的过程噪声协方差阵。
且有:

5、车辆安全状态决策
经过对障碍物的识别和对前方目标的跟踪, 自车已经能够获取足够的车辆信息, 下面就是根据这些信息, 对自车行驶的安全状态进行决策。车辆的安全状态决策分为安全时间决策和安全距离决策两种。在车辆驾驶过程中, 根据驾驶习惯可以将司机分为冒进型、平稳性和谨慎型, 每种司机评估的安全距离不同, 为了给司机舒适的驾驶状态, 要将司机的驾驶习惯融入到驾驶安全状态决策中, 这种习惯更容易融入到安全距离中, 因此提出了融入驾驶员习惯的预瞄安全距离模型[10]。记自车行驶时间tg (驾驶员反应时间) 后与前车碰撞的临界车距为Slim, 驾驶员自认为的最小安全距离为Df, 则:

式中:Shabit—驾驶员驾驶习惯决定的常量, 按照冒进型、平稳型、谨慎型取不同的值, 一般为 (2~5) m。而碰撞临界车距Slim计算公式为:

式中:x′ (t) —自身运动速度;xb′ (t) —障碍物运动速度。
当传感器测量到的车距小于Df时, 则汽车判断为危险车距, 进行制动;当测得的车距大于Df时, 则判断为安全车距, 继续正常行驶。
6、实验验证
6.1、目标跟踪实车试验
首先对汽车进行改装, 使用车辆为马自达6, 将LMS-111激光雷达安装于车牌正上方, 将雷达的扫描范围定义为±45°;对ABS自动系统进行改装, 使其能够自动制动;将轮速传感器测得的自车车速实时传至控制器, 改装后车辆, 如图3所示。

图3 改装车辆
为了保证实验安全且保护实验装备, 将车辆相对于障碍物的运动改进为障碍物相对于车辆的运动, 具体方法为:将实验汽车静止在某处, 实验人员在车辆前方20m处靠近车辆, 实验人员的行走方式与速度不做规定, 数据的采集使用LMS-111激光雷达配套应用软件SOPAS ET软件, 雷达的采样周期为0.106s, 采集数据共150个。得到的位置跟踪误差、速度跟踪误差, 如图4、图5所示在目标跟踪的实车试验中, 对实验人员的运动方式不做规定, 符合在城市轨道中运动多变的特点。从跟踪效果看, 基于当前统计模型的自适应跟踪方法能够快速地收敛, 并且位置和速度的跟踪精度较高, 能够满足使用要求。
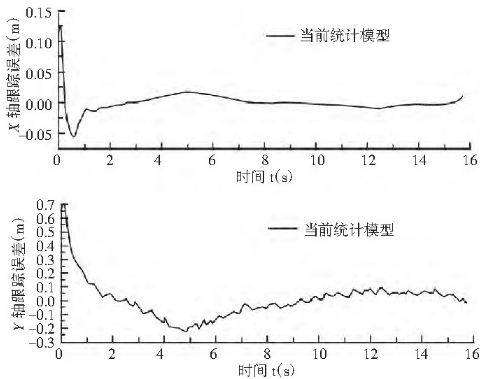
图4 X轴、Y轴位置跟踪误差
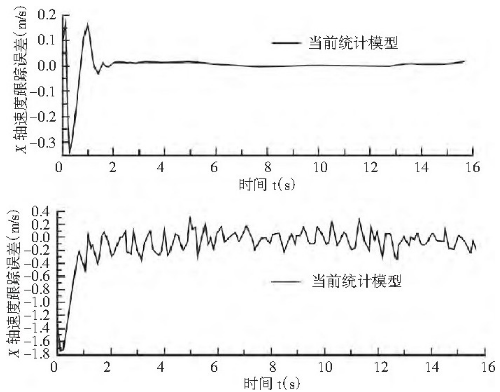
图5 X轴、Y轴速度跟踪误差
6.2、主动防撞系统试验
在试验时为确保安全, 使用一足够大的纸箱作为障碍物, 实验路面的附着系数φ=0.7, 则汽车全力制动加速度为a1=φg, 驾驶员的驾驶预判时间一般为 (1.2~2.0) s, 这里取为tg=1.5s, 驾驶习惯取值Shabit=2.0m。为了对主动防撞系统进行验证, 在不同速度下对汽车进行试验。车辆以一定速度驶向障碍物, 雷达检测到前方障碍物且实时测量车辆与障碍物的距离, 当距离达到安全距离阈值时, 制动系统制动车辆直至停止, 将最终的制动距离进行存储, 得到的制动距离散点, 如图6所示。
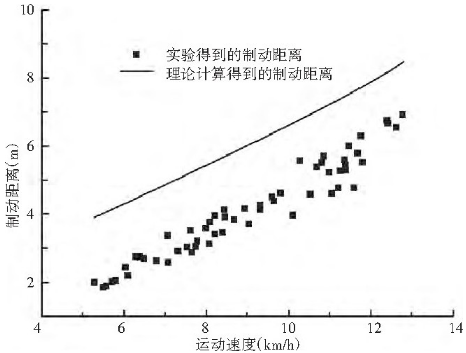
图6 制动距离
从图中可以看出, 汽车在速度增加的情况下, 制动距离也不断增加, 而且制动距离的增加幅度要大于运动速度的增加幅度。而且汽车制动距离与理论距离大致保持2m距离, 这2m距离就是根据驾驶员驾驶习惯预留出的安全距离Slim, 这充分说明了汽车防撞系统的安全性和有效性, 它能够在安全距离附近将汽车刹住, 防止碰撞障碍物。
7、结论
设计了汽车主动防撞系统, 将系统分为四个部分, 包括信息提取、障碍物识别、目标跟踪、安全状态决策四个部分。使用了自适应最邻域聚类算法辨识自车前方障碍物, 给出了基于当前统计模型的自适应Kalman滤波跟踪方法, 提出了融入驾驶员驾驶习惯的预瞄安全距离模型, 使用实车实验验证了涉及系统的安全可靠性。
参考文献
[1]高振海, 管欣, 郭孔辉.模糊决策理论在驾驶员行为研究中的应用[J].系统工程理论与实践, 2001, 21 (6) :104-107. (Gao Zhen-hai, Guan Xin, Guo Kong-hui.The Application of Fuzzy Decision Theory in the Research of Driver Behavior[J].System EngineeringTheory&Practice, 2001, 21 (6) :104-107.)
[2]李玉芳.FMCW毫米波雷达系统中频电路及信号处理研究[Z].上海微系统与信息技术研究所, 2002. (Li Yu-fang.Research on if Circuit and Signal Processing of FMCW Millimeter Wave Radar System[Z].Shanghai Institute of Microsystem and Information Technology, 2002.)
[3]吴涛.考虑驾驶员避撞行为特性的汽车前方防碰撞系统研究[D].长春:吉林大学, 2014. (Wu Tao.Study on Forward Collision Avoidance System Considering Drivers’Collision Avoidance Behavior Characteristic[D].Changchun:Jilin University, 2014.)
[4]邹媛.车联网节点定位及监控系统的设计与研究[D].上海:上海交通大学, 2015. (Zhou Yuan.Design and Research of Vehicular Networking’s Node Location and Monitoring System[D].Shanghai:Shanghai Jiaotong University, 2015.)
[5]饶卫振, 金淳, 黄英艺.求解TSP问题的最近邻域与插入混合算法[J].系统工程理论与实践, 2011, 31 (8) :1419-1428. (Yao Wei-zhen, Jin Chun, Huang Ying-yi.Hybrid Algorithm of the Nearest Neighbor and Insertion for the Traveling Salesman Problem[J].System Engineering-Theory&Practice, 2011, 31 (8) :1419-1428.)
[6]黄伟平, 徐毓, 王杰.基于改进“当前”统计模型的非线性机动目标跟踪算法[J].控制理论与应用, 2011, 28 (12) :1723-1728. (Huang Wei-ping, Xu Min, Wang Jie.A Nonlinear Maneuver-tracking Algorithm Based on Modified Current Statistical Model[J].Control Theory&Applications, 2011, 28 (12) :1723-1728.)
[7]黄伟平, 徐毓, 王杰.基于改进“当前”统计模型的转弯机动跟踪算法[J].控制与决策, 2011, 26 (9) :1412-1416. (Huang Wei-ping, Xu Min, Wang Jie.Algorithm based on modified current statistic mode for turn maneuver[J].Control and Decision, 2011, 26 (9) :1412-1416.)
[8]王向华, 覃征, 杨新宇.基于多次卡尔曼滤波的目标自适应跟踪算法与仿真分析[J].系统仿真学报, 2008 (23) :6458-6460. (Wang Xiang-hua, Tan Zheng, Yang Xin-yu.Adaptive Algorithm Based on Multi-Kalman Filter for Target Tracking and Simulation Analyses[J].Journal of System Simulation, 2008 (23) :6458-6460.)
[9]符拯, 王书满, 刘丙杰.自适应卡尔曼滤波的最新进展[J].战术导弹技术, 2009 (6) :62-66. (Fu Zheng, Wang Shu-man, Liu Bing-jie.An Overview of the Development of Adaptive Kalman Filtering[J].Tactical Missile Technology, 2009 (6) :62-66.)
[10]吴祚龙.驾驶员预瞄的改进算法及其输入信息融合的研究[D].长春:吉林大学, 2011. (Wu Zuo-long.Research on Improved Algorithm for Driver Preview and Fusion of Input Information[D].Changchun:Jilin University, 2011.)