24小时论文定制热线
![]()
24小时论文定制热线
![]()
摘要:当前的船舶电子控制系统控制过程高度集中, 如果其中某一部件损坏, 很可能导致整个控制系统无法正常运行, 提出一种基于嵌入式的船舶电子控制系统设计方法, 按照的功能要求对舰船电子控制系统进行模块划分, 并对系统的各个功能模块结构进行设计;为了改善当前方法设计的控制系统灵活性较差和工作效率较低的问题, 对船舶电子控制系统的驱动、电源、视频、测距、控制中心等进行模块化功能设计;选取实时性较强的VxWorks嵌入式操作系统作为舰船电子控制系统的主控制系统, 测试结果表明:设计的控制系统实现了驱动功能和控制功能的模块化, 能够保障船舶相关工作的顺利进行。
关键词:舰船; 电子控制系统; 模块化; 嵌入式;
Abstract:Control system of ship electronic control the process of the highly centralized, if one part is damaged, it may cause the whole control system can not run normally, a marine electronic control system design method based on embedded system, according to the functional requirements of the modules of ship electronic control system, and each functional module of the system structure the design; in order to improve the design method of the control system of poor flexibility and work efficiency is low, the drive, the electronic control system of ship power, video, distance measurement and control center of the modular function design; the main control system selects the real-time embedded operating system Vx Works as the ship electronic control system and the test results show that the designed control system realizes modular drive function and control function, can Enough to ensure the smooth progress of the related work of the ship.
Keyword:Ship; electronic control system; modularization; embedded;
船舶多采用电子控制系统进行相关工作, 主要是通信工作, 通过铺设在海底电缆, 进行电信传输。随着经济全球化和互联网技术的蓬勃发展, 船舶智能化程度呈逐年上升趋势, 通过电子控制系统完成通信已经逐渐成为船舶通信的一项最重要手段。当前舰船电子控制系统以开架式结构作为载体, 通过搭载各种类型先进的传感器设备与检测仪器, 完成工程。该系统已经在海底石油、航道水运障碍物排除、大坝检测与维修、海洋资源科考、海洋事故搜救打捞、国防军事等领域得到了成功应用。但是由于舰船电子控制系统作业环境的复杂性和不确定性, 以及任务的类型不同需要搭载的设备类型也不相同, 需要对舰船电子控制系统的优化设计研究[1]。
1、基于嵌入式的舰船电子控制系统的模块化设计
1.1、系统模块划分与结构设计
船舶电子控制系统的各个功能模块应该具有以下特性[2–3]:
1) 系统的每个模块单元都应该具备独立完成某一特定任务的能力;2) 系统的每个模块单元都应该具有单独的驱动系统, 电子控制系统本身的重量和惯性都应该尽量小, 以保证进行时具有最佳的运动特性和动作特性;3) 系统的每个功能模块都应该具有良好的装配性能和较强的通信能力, 便于协调系统各个功能模块之间的工作;4) 系统的每个功能模块都应该具有一定的数据信息处理能力;5) 设计系统软件部分时应该保证舰船电子控制系统的通讯稳定性、实时性、可靠性、易维护性和高精度性。
为了保证舰船电子控制系统设计质量, 舰船电子控制系统的各个节点包装均以圆柱形体为主。综合考虑舰船电子控制系统的需要, 将系统功能模块划分为3类, 如图1所示。
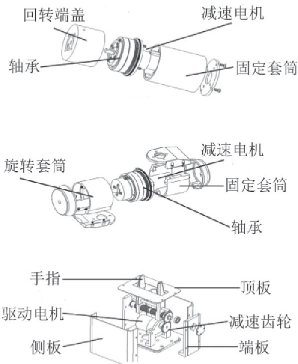
图1 模块设计
1.1.1、舰船电子控制系统的单自由度功能模块
非偏置型摇摆模块能够避免偏置型摇摆模块会增加舰船电子控制系统的额外力矩, 影响系统模块化控制系统的平衡性, 使得舰船电子控制系统运动学与动力学求解上的难度增加的弊端。为此设计舰船电子控制系统时采用摇摆模块的非偏置型结构。
1.1.2、舰船电子控制系统的多自由度功能模块
舰船电子控制系统的多自由度功能模块具有结构紧凑的特点, 能够在海底作业空间有限的情况下实现电子控制系统相对复杂的控制, 图2为设计的一种舰船电子控制系统两自由度功能模块。该功能模块的设计能够避免舰船电子控制系统交汇结构和偏置结构的缺陷。
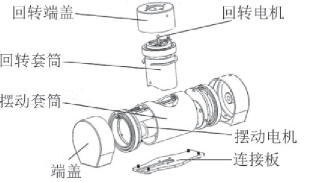
图2 舰船电子控制系统的两自由度功能模块设计
1.1.3、舰船电子控制系统的连接功能模块
舰船电子控制系统的连接功能模块有2种:一种是一般连接模块;另一种是辅助连接模块, 一般连接模块用来调整舰船电子控制系统各个关节的间距和方位, 能够根据工作需要建立舰船电子控制系统构形。另外, 为了实现舰船电子控制系统重构特定, 需要对辅助连接模块进行了设计。
1.2、舰船电子控制系统的模块化控制系统设计
舰船电子控制系统的模块化控制系统由多个功能模块根据工作需要连接在一起, 这些功能模块在驱动和功能性能上具有相对独立性, 在执行时还能够有机结合[4]。
1) 系统的驱动功能模块设计
由于系统电路板空间有限, 尽量在满足功能模块电机的驱动功率条件下选用体积小的芯片。
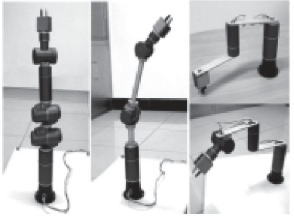
图3 舰船电子控制系统构形图
2) 系统的控制中心功能模块设计
选用ARM系列的STM32微处理器作为系统的主控制芯片。结构设计如图4所示。
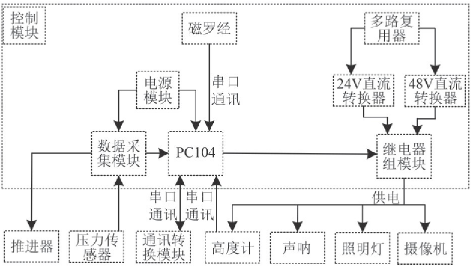
图4 系统的控制中心功能模块设计
3) 系统的感知功能模块设计
该功能模块用于运动模块感知舰船电子控制系统运动的位置, 并检测舰船电子控制系统是否超出了运动模块界限。
4) 系统的电源功能模块设计
该模块是基于德州仪器生产的降压开关型LM2596芯片搭建的, 具有固定频率振荡器和基准稳压器, 能够很好地保护系统电压, 应对系统的突发状况, 且能够为其他芯片提高稳定的电源, 协调系统各个功能模块的工作。
5) 系统的视频功能模块设计
该功能模块主要由高清舰船摄像头与智能云视频采集卡2部分组成。
6) 系统的测距功能模块设计
选取基于AVR MEGA 2560设计的超声波测距系统。根据超声波测距系统统计的时间差来计算舰船电子控制系统的测量距离。
7) 系统的通信功能模块设计
该功能模块的设计是用于和系统其他功能模块之间的通信工作, 共享和协调工作信息, 共同完成工作。
1.3、系统软件结构设计
由于工作环境复杂多变, 控制系统软件效率一定要具有高效性和及时性。Vx Works嵌入式操作系统具有较强的实时性特点, 设计一种基于Vx Works的控制系统软件。软件结构分为舰船电子控制系统监测层、舰船电子控制系统控制层、舰船电子控制系统执行层和舰船电子控制系统数据管理层4部分。
2、实验分析
在湖泊区域进行了舰船电子控制系统模拟试验, 分别对航行功能进行了多次实验测试, 获得了大量实验数据。
2.1、舰船电子控制系统的自主定向航行试验
舰船电子控制系统的自主定向航行是指舰船电子控制系统保持给定的航向角航行, 即使舰船电子控制系统受到干扰偏离了原始航线, 仍然能遵循原航向角继续航行。在湖泊区域进行自主航行测试如图5所示。从图5中可以看出, 舰船电子控制系统能较快到达设计的期望航向, 并且与设计的期望控制结构基本吻合。
2.2、舰船电子控制系统的自主定速航向试验
舰船电子控制系统的自主定速航向试验是指舰船电子控制系统在进行时能够自动地保持航速, 并且以固定的速度航行通信, 图6是采用本文方法根据舰船电子控制系统实际定速试验数据绘制出的实际航速与期望航速之间的对比曲线图。从图6中可以看出, 舰船电子控制系统能较快到底设计的期望航速, 尽管舰船电子控制系统的期望航速与实际航速之间存在一定偏差, 但舰船电子控制系统航速维持的比较稳定。
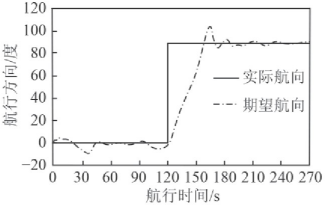
图5 舰船电子控制系统自主定向航行试验
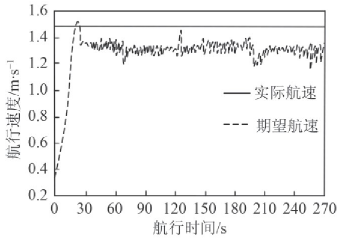
图6 舰船电子控制系统自主定向航速试验
3、结语
本文研究基于嵌入式模块化思想对船舶电子控制系统进行了设计, 丰富了舰船电子控制系统模块种类, 为舰船电子控制系统工作构形提供了更加丰富的选择;设计的以圆柱形为主的舰船电子控制系统形体结构和非偏置式结构的摇摆模块提高了系统工作刚度和平衡性, 能够保障舰船电子控制系统通信工作的稳定进行;采用的Vx Works嵌入式操作系统具有较强的实时性特点, 能够保证控制系统软件效率高效性和及时性的要求。
参考文献
[1]敬强, 解玉文, 高安洁, 等.舰船电子控制系统建模及运动控制系统研究[J].机床与液压, 2017, 45 (3) :89-91.
[2]王洪斌, 李程, 王跃灵, 等.基于Arduino和蓝牙技术的六足电子控制系统控制系统设计[J].黑龙江大学自然科学学报, 2015, 32 (4) :533-537.
[3]刘慧婷, 冯金金, 张明.舰船电子控制系统操纵系统优化控制研究[J].计算机仿真, 2016, 33 (5) :299-303.
[4]窦京, 王志东, 凌宏杰, 等.一种模态切换舰船电子控制系统初步设计[J].舰船科学技术, 2015, 37 (3) :94-100.