24小时论文定制热线
![]()
24小时论文定制热线
![]()
摘 要
交通事故引发的人员伤亡问题备受人们关注,为减少交通事故的发生,对汽车防碰撞系统的研究意义重大。汽车防碰撞系统可有效提高车辆的主动安全性,预防碰撞事故的发生。论文以汽车防碰撞系统的雷达作为研究对象,主要研究内容如下:
首先提出了汽车防碰撞系统的性能要求。通过对比分析毫米波雷达、激光雷达、视觉、超声波和红外线传感器的工作特性,确定了毫米波雷达方案作为汽车防碰撞系统的传感器,并对毫米波雷达工作过程和结构进行了研究。建立安全距离模型,计算得到防止碰撞的安全距离。
然后根据汽车防碰撞系统性能要求,选择采用调频连续波雷达,并研究了调频连续波雷达的工作原理。对 MFSK、LFMCW、FSK、SFCW 四种工作体制测距测速原理进行研究,选择采用 MFSK 体制和 LFMCW 体制进行仿真试验。确定了雷达系统的参数后,使用 MATLAB 软件建立汽车防碰撞雷达系统模型,并分别在单目标和多目标环境下进行仿真,测得目标的距离和相对速度。结果表明雷达参数设置合理,雷达系统设计满足要求,MFSK 体制测距测速精度和准确率优于LFMCW 体制,确定 MFSK 体制雷达应用于汽车防碰撞系统。
最后分析汽车使用环境,确定了汽车防碰撞系统雷达的噪声主要为高斯白噪声的特性。依据基本理论,提出小波变换、卡尔曼滤波和经验模态分解三种去噪算法。使用 ADS 软件仿真汽车防碰撞系统雷达的含噪中频信号,应用三种去噪方法进行信号处理,得到去噪后的中频信号。结果表明小波变换和卡尔曼滤波去噪效果较好,经验模态分解较差。
本文在雷达工作体制和信号去噪方面的研究成果,有利于提高雷达测量目标信息的准确度和速度,提高汽车防碰撞系统工作性能,对基于毫米波雷达的自动驾驶研究也有一定指导意义。
关键词:汽车防碰撞系统;雷达;测距测速;信号去噪
Abstract
The casualties of traffic accident cause people's attention. In order to reduce the occurrence of traffic accidents, the study of automobile anti-collision system is of great significance. Automobile anti-collision system improves vehicle's active safety effectively and prevents the happening of the collision. This paper select automobile anti-collision system radar as the research object, the main research content is as follows:
At first, proposing the requirements of automobile anti-collision system performance. By comparing the working characteristic of millimeter wave radar, laser radar, vision, ultrasonic and infrared sensors, using the millimeter wave radar sensor in automobile anti-collision system and researching the and structure of the millimeter wave radar. Safety distance model is established, then obtaining the safety distance through calculating.
Secondly, according to the requirements of automobile anti-collision system performances, selecting the frequency modulated continuous wave radar and researching the working principle of frequency modulated continuous wave radar. Researching the ranging principle of MFSK, LFMCW, FSK, SFCW, choosing MFSK and LFMCW.Setting up the radar system parameters, using MATLAB to establish automotive anti-collision radar system model and measuring the distance and relative velocity of the target under the environment of single objective and multi-objective. The results show that the radar parameters and system design meet the requirements.MFSK's precision and accuracy is better than that of LFMCW.
Finally, analysis the characteristics of noise in automobile anti-collision system. The main radar noise is Gaussian white noise. Based on basic theory, putting forward the denoising algorithm of wavelet transform and kalman filter and the empirical mode decomposition. Using ADS simulate the intermediate frequency signal in automobile anti-collision system and the using those denoising methods in signal processing. Results show that the effect of wavelet transform and kalman filtering is better than empirical mode decomposition.
This paper research the radar system and signal denoising, which improve the accuracy of measurement and the performance of automobile anti-collision system. This paper also in favor of the research of autopilot based on millimeter wave radar.
Keywords:automobile anti-collision system, radar, distance and velocity measurement,signal denoising
大众集团推出 Front Assist 城市紧急刹车系统,其工作车速范围为 0-30km/h,将毫米波雷达集成在车辆头部车标中,行车电脑根据探测到的车速和车距信息判断是否有碰撞危险。若有危险车载蜂鸣器会发出声音提醒驾驶员,驾驶员若没有及时反应,车辆会自动制动。奥迪汽车公司推出 Audi pre sense front safetysystem,保护车辆行驶中周围其他交通参与者,检测汽车前方可能发生追尾碰撞的交通状况,提供不同级别的响应辅助驾驶员。根据驾驶者反应,该系统采取发出警报、部分制动、全力制动三阶段措施,同时可自动开启危险警告灯、束紧安全带、关闭车窗以及天窗。该系统可以使汽车碰撞前速度最大降低40km/h,降低 事 故 后果。梅 赛德 斯—奔驰 公司 开发 的预 防性 安全 系统(PRE-SAFE),配备短程、中程、远程三种雷达以监控车辆前方区域,该预警安全系统的可探知出前方目标的相对速度和距离,根据安全距离判断危险情况,在事故即将发生时发挥作用,将危险信息显示给驾驶员并发送到汽车控制系统,可激活执行机构进行刹车辅助操作。奔驰公司经过测试,该系统在车辆时速低于 50km/h 时可以避免车祸发生,车速高于 50km/h 而低于 72km/h 时可以最高降低车祸严重程度的 41%。博世集团的预测性紧急制动系统基于智能传感器技术不断监视车辆周围目标,能给提前检测出潜在的危险情况[7]。在紧急情况时,预测性紧急制动系统会发出警报,必要时系统会自动介入以避免碰撞或缓解事故后果。该系统配备中距离和远距离雷达传感器,可确保在恶劣天气条件下传感器可以正常工作,通过多传感器数据融合提高测量的范围、可靠性和准确性。
沃尔沃汽车公司的 City Safety 城市安全系统是一项主动防撞技术,它能够帮助驾驶员避免城市交通中常见的低速追尾事故。沃尔沃汽车公司预计该系统能够减少一半的追尾事故,最大程度的减少损失。当车速达到 30Km/h 时系统自动启动,通过位于车辆前部的雷达系统监视交通状况,特别是车头 6m 范围内的状况。
当检测到前车制动或有障碍物阻挡本车行驶时,系统发出警报并开始介入制动或控制方向盘。该系统的计算速度可达到每秒 50 次,可根据距离和车速计算出需要制动的时刻。此外,沃尔沃汽车公司还推出 CWAB(Collision Warning withAuto Brake),该系统雷达可探测车辆前方 150 米范围,最大可能降低碰撞发生时的车速,从而降低事故造成的乘员伤害。两种系统相互配合,共同构成沃尔沃防碰撞主动安全系统。
日产公司推出 NISSAN i-SAFETY 系统,该系统中前方碰撞紧急制动系统可在 10-80km/h 车速范围内工作,当检测到碰撞发生的危险时,先会通过仪表盘发出警示图像和声音,若驾驶者未采取应对,系统会介入制动,车辆停止后保持静止状态 2 秒。富士通与松下合作开发了可检测行人的 79GHz 频带毫米波雷达,能在 0.1 秒时间之内检测、分辨出车辆前方 40m 以内间隔最小 20cm 的行人和非机动车[8]。该雷达系统采用了 CMOS 技术构成了雷达收发电路,大规模产业化生产可降低很大的成本,可以使更多普通级车辆配备碰撞预警系统,以低成本获得车辆周围交通情况。本田汽车公司推出 Honda SENSING 系统,其中包括碰撞缓解制动系统 CMBS(Collision Mitigation Brake System),利用毫米波雷达检测前方并自动刹车以降低因驾驶员注意力不集中发生的碰撞事故几率,车速小于 30km/h 时可自动制动到车辆静止。丰田汽车公司、电装株式会社以及三菱汽车公司三家公司联合开发先进雷达技术,在世界范围内率先推出采用相控阵技术的电子扫描式毫米波雷达。该型号汽车用雷达具有结构紧凑,抗干扰性好的优势,采用调频连续波测距方式,具备很好的目标识别性能。马自达汽车公司的 i-ACTIVENSE 是一套整合式的智能安全辅助系统,可为驾驶者提供行车辅助信息,一定程度的降低交通事故风险,保护车内乘员的生命安全,全面提升汽车的主动安全性。该主动安全系统包含 SCBS(Smart City Brake Support)和SBS(Smart Brake Support)两个子系统,分别作为低速和中高速刹车辅助系统。
在车辆前部安装毫波雷达和摄像头等传感器,侦测前方障碍车辆或其他物体,先以灯光和声音警示驾驶员,以辅助驾驶员正确认知危险而提早作出反应,若驾驶员无反应措施则系统刹车自动防御,避免或减轻碰撞的伤害。丰田汽车公司于 2015 年在日本市场推出 Toyota Safety Sense(TSS)规避碰撞辅助套装,分为 TSS-C 和 TSS-P 两个版本,区别在于 TSS-P 相对于 TSS-C 增加行人预防碰撞和动态雷达巡航功能。TSS-P 采用毫米波雷达和摄像头传感器组合,TSS-C 采用红外激光雷达和摄像头组合,该系统工作车速区间为 15-180km/h,且需满足与前车速度差至少为 15km/h。当与前车速度差大于 30km/h 时,该系统会提供辅助制动力。
通用汽车公司的 CMB/CMS 碰撞缓解主动刹车系统,能够本车道内前方目标车辆,当本车与其他车辆碰撞预计时间小于 2 秒,系统发出警报,当驾驶员没有进行制动且本车与其他车辆预计碰撞时间小于 0.5 秒,系统自动刹车以避免或减轻碰撞伤害。福特汽车公司开发了 ACS(Adaptive City Stop)汽车防碰撞系统,该系统主要针对低速城市道路下的追尾碰撞事故,在车速小于 30km/h 自动运行保障车辆主动安全,当车速小于 15km/h 时可避免碰撞的发生。该系统采用激光雷达传感器,安装于车辆前风挡玻璃处,能够探测车辆前方 10 米左右的障碍物,并且可探测多个目标,在仪表台显示目标距离信息,距离过近时发出警报声,当侦测到将要碰撞时系统会介入制动。此外,ACS 系统可调节灵敏度,避免在城市拥堵路况下系统过多介入制动而影响正常驾驶。德尔福派克电气公司研发的电子扫描雷达模块,采用了目前国际普遍的 76GHz 频率,其扫描距离远,角度覆盖范围宽广,可同时扫描多达 64 个目标[10]。该雷达模块可探测前方目标的状态,对于不同的目标,系统会根据相对距离与驾驶员反应时间,对发生碰撞的可能性进行估计,并将信息传达给驾驶员。在车辆有碰撞危险时,通过灯光闪烁和制造报警声音提醒驾驶员采取措施,如果驾驶员没有及时采取有效措施解除碰撞危险,紧急自动刹车系统(AB)和刹车辅助(ABA)系统会启动控制车辆以避免碰撞发生或者减轻碰撞所造成的后果。
河南护航实业有限公司研发的智能紧急刹车系统可在时速 3-120km/h 范围内实现主动防撞功能,可有效降低 80%事故率。江苏赛博电子有限公司开发的汽车防碰撞系统,雷达工作频率为 38GHz,可对车辆前方运动或静止的物体进行探测,能够获取到多达 20 个目标的信息,精度可达 0.5m,并且可以判断出潜在的危险并发出警报[11]。中国科学院上海微系统与信息技术研究所开发的SAE100 型毫米波防撞雷达系统成为我国车用雷达研究的先驱。该防撞雷达系统采用三角波调制的线性调频连续波 LFMCW 体制的工作方式,其雷达工作频率为 35GHz ,信号处理部分采用 DSP 芯片,抗干扰性能良好,具备远距离探测能力,测距范围大于 100m,能够检测车辆前方速度小于 100km/h 的单一障碍物目标,并能根据障碍物的危险程度进行报警[12]。中国科学院上海微系统与信息技术研究所又成功研制出拥有自主知识产权的小型防撞雷达系统,其雷达前端芯片为首款国产雷达前端芯片,为国内汽车防碰撞系统用雷达的研究和发展奠定了良好基础。清华大学智能交通信息系统实验室针对交通系统中碰撞问题,以改善交通安全为目标,综合运用信息处理、通信、控制和计算机等先进技术,在统计信号和实时信号处理方面展开研究,研发车辆智能防撞系统。华中科技大学研制出一种应用于汽车防碰撞系统的雷达,采用工作体制为线性调频连续波类型的毫米波雷达,使用 32 位单片机进行控制[13]。上海交通大学卓斌教授带领的研究团队提出了一套基于毫米波雷达的智能车路协同主动安全系统,它综合分析雷达数据和周边环境信息,通过数据融合技术为驾驶员提供行车安全信息。此外,国内的很多高校例如国防科技大学、吉林大学、北京理工大学、重庆大学、长安大学、同济大学等也进行了汽车防碰撞系统方面的研究。
我国在汽车防碰撞系统的研究上起步较晚,与国外发达国家相比存在一定的差距。对汽车碰撞系统的研究主要集中在各大高校和科研院所,水平停留在试验阶段,没有商业化大规模生产的产品。目前汽车防碰撞系统还存在雷达误报警率高,抗干扰能力差等问题,车载雷达传感器性能仍需提高,对雷达信号处理的优化研究十分必要。
对雷达系统信号处理的研究早期主要集中于设计雷达接收机以尽可能的使雷达的脉冲或连续波信号的信噪比达到最佳。North 应用他的研究成果匹配滤波器理论,大幅度提高了雷达信号的检测性能[14]。Woodward 应用 Shannon 提出的基础信息论进行雷达信号处理形成了经典雷达检测理论,从而推动了最佳准则检测方法的发展[15];之后,Woodward 又提出了波形设计概念和雷达模糊原理,发表于他的着作《概率论和信息论在雷达中的应用》中,该书为雷达系统的后续研究奠定了坚实基础,对进一步促进发展雷达信号处理理论意义重大。为了提高雷达性能,雷达的发射信号改为使用线性调频脉冲信号,代替了传统的简单脉冲信号,这项改进使得雷达系统获得了更为准确测得相对距离、速度数值信息和提高了相对距离、速度识别分辨率。相位编码的脉冲压缩技术也得到了较快发展和成功应用。雷达信号处理成为一门独立学科,吸引大量科研工作者投入研究[16]。
数字技术的发展推动了雷达信号处理学科中出现了数字信号处理新方法并且进入实际运用。数字信号处理代表性方法为快速傅立叶变换(Fast FourierTransform, FFT)。快速傅立叶变换方法是一种快速算法,该方法改进了离散傅立叶变换(Discrete Fourier Transform, DFT),从而减少了计算量。采用快速傅立叶变换方法进行雷达信号处理,凭借计算量小的优势可以提高响应速度,从而提高雷达系统的性能,快速傅立叶变换法成为雷达信号处理的常用方法[17]。
因快速傅立叶变换算法本身存在的特定缺陷,普通的快速傅立叶算法无法满足一些雷达系统的信号处理要求,使用者对雷达系统性能的要求不断提高,快速傅立叶变换算法计算量与计算精度之间存在的矛盾在高性能雷达系统中尤为突出[18]。因此研究者们对传统的快速傅立叶变换开展了改进研究工作,快速傅立叶变换算法得到进一步发展以满足更高要求的雷达系统信号处理的需要[19]。从传统快速傅立叶变换算法的算法、计算量以及计算精度三个方面进行研究改进,出现了比较多的新改进方法例如结合拉普拉斯反变换的快速傅立叶变换算法、自适应快速傅立叶变换算法、经典 Zoom-FFT 算法和自适应 Zoom-FFT 频域细化算法等[20]。对改进快速傅立叶变换算法研究的同时,研究者们在其他类型算法的研究上也取得了突破性成果,以最大嫡法和谱估计法(Multiple Signal Classification,MUSIC) 法为代表。J.P. Berg 提出了最大嫡谱估计法,采用的是自相关函数的最大嫡延拓原理,按最大嫡原则对未知延迟点上的自相关函数进行外推计算[21]。
最大嫡法大大提高了雷达系统信号的分辨率,最大嫡法不需要对数据加窗,在处理高信噪比的信号时没有谱旁瓣的影响,这两个特性使得最大嫡法相比快速傅立叶变换方法优势显着。R. O. Schmidt 提出谱估计 MUSIC 算法。谱估计法将雷达系统的观测信号视为由噪声和有用信号共同作用,把观测空间分解为噪声子空间和信号子空间,根据子空间的正交性构造代价函数,谱估计法基于矩阵特征分解进行计算[22]。MUSIC 算法能够更突出信号的主峰,整体更光滑,MUSIC算法对常见的谐波信号参数估计都适用,不同的信噪比下的信号处理结果基本一致[23]。
小波分析开辟了新的数学发展领域,数学理论研究价值深刻,工程应用范围广阔,特别在信号去噪方面优势巨大,具有理论和实践双重意义。研究者们一直在对小波进行深入研究,小波分析逐渐建立起完善的数学体系和深厚的理论基础。小波分析理论的研究与其实际应用过程联系紧密,理论和应用相互促进发展,小波分析在诸多科学、工程领域得到广泛应用,取得了显着的成果。
小波分析具有时间平移和多尺度分辨率的特点,可同时进行时频分析[24]。小波分析与傅里叶变换相比,小波分析在时域和频域上都是局部变换,而傅立叶变换只在频域上是局部的。短时距傅里叶变换(Shot-time Fourier Transform, STFT)虽然时域和频域都是局部化的,但频率和时间的分辨率存在问题,而小波能够通过多分辨率分析给出更好的信号的表示,对信号进行多尺度细化分析,从而更为有效地从信号中提取有用信息。傅立叶变换在处理实际非稳定信号时效果较差,其优势在于处理性质随时间稳定不变的信号。小波分析是傅里叶变换的一种改进,能够有效处理许多傅里叶变换难以解决的问题,小波分析在雷达信号处理领域发挥着十分重要的作用[25]。
汽车防碰撞系统雷达设计系统模拟:
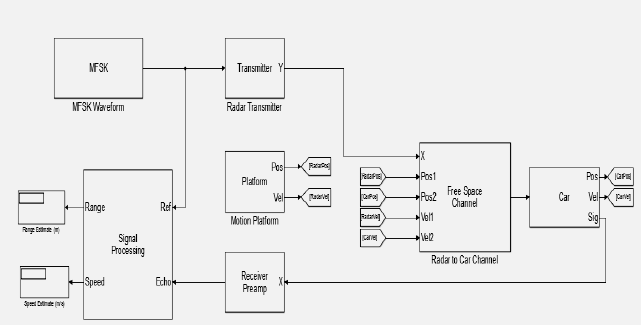
汽车防碰撞系统测距测速仿真模型
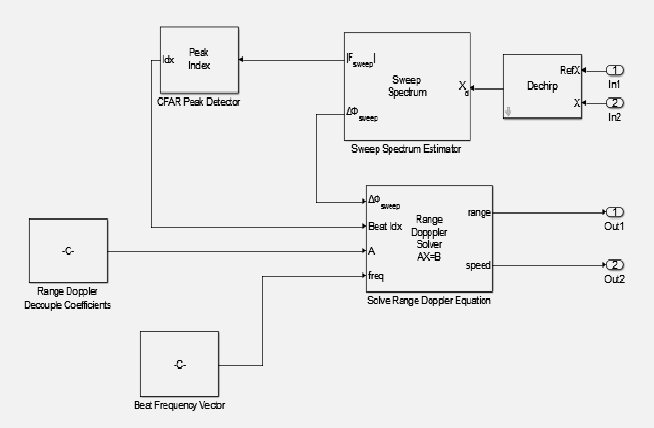
MFSK 体制信号处理子系统
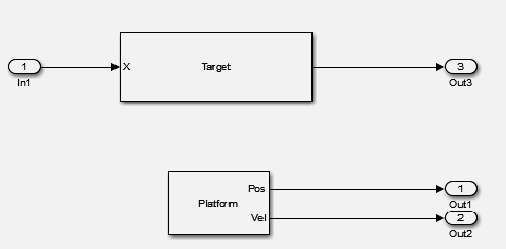
Car 模块子系统
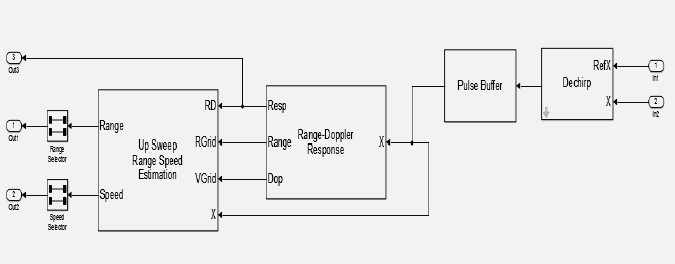
LFMCW 体制信号处理子系统
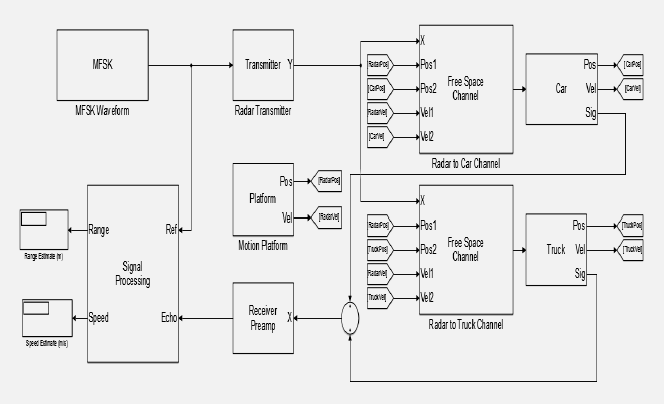
MFSK 体制雷达多目标测距测速仿真模型
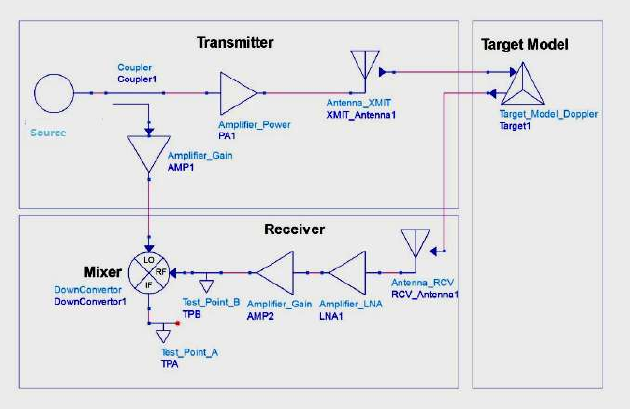
汽车防碰撞装雷达系统仿真模型
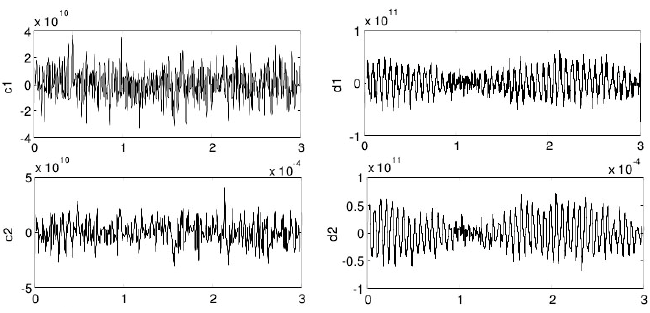
含噪中频信号的小波变换去噪结果
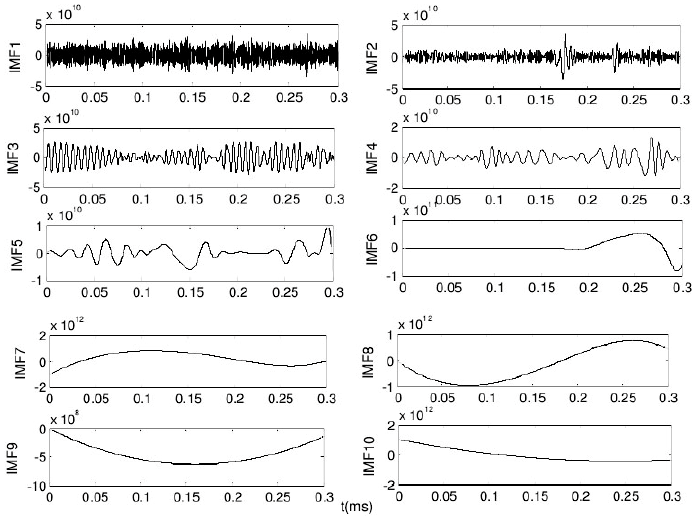
经验模态分解各阶 IFM 分量
目 录
摘要
Abstract
第 1 章 绪论
1.1 研究背景、意义和目的
1.1.1 研究背景
1.1.2 研究意义
1.1.3 研究目的
1.2 研究现状
1.3 主要研究内容及章节安排
第 2 章 汽车防碰撞系统传感器研究
2.1 汽车防碰撞系统传感器性能要求
2.2 汽车防碰撞系统传感器方案
2.2.1 毫米波雷达传感器
2.2.2 视觉传感器
2.2.3 超声波传感器
2.2.4 红外线传感器
2.2.5 激光雷达传感器
2.3 雷达传感器工作过程与结构
2.4 安全距离模型
2.5 本章小节
第 3 章 汽车防碰撞系统雷达工作体制
3.1 雷达类型选择
3.2 调频连续波雷达工作原理
3.3 调频连续波雷达测速测距原理
3.3.1 频移键控体制测速测距原理
3.3.2 线性调频连续波测速测距原理
3.3.3 步进调频连续波体制测速测距原理
3.3.4 多频移键控体制测速测距原理
3.4 雷达工作体制选择
3.5 本章小结
第 4 章 汽车防碰撞系统雷达信号去噪方法
4.1 雷达信号去噪概述
4.2 小波变换
4.2.1 小波变换基本原理
4.2.2 小波阈值去噪算法
4.3 卡尔曼滤波
4.3.1 卡尔曼滤波理论基础
4.3.2 卡尔曼滤波基本算法
4.3.3 卡尔曼滤波去噪算法
4.4 经验模态分解
4.4.1 经验模态分解原理
4.4.2 经验模态分解去噪算法
4.5 本章小节
第 5 章 汽车防碰撞雷达系统仿真
5.1 雷达参数选择
5.2 汽车防碰撞系统测距测速仿真
5.2.1 单目标测距测速仿真
5.2.2 多目标测距测速仿真
5.2.3 仿真结果分析
5.3 汽车防碰撞系统雷达中频信号去噪仿真
5.3.1 小波变换去噪仿真
5.3.2 卡尔曼滤波去噪仿真
5.3.3 经验模态分解去噪仿真
5.3.4 去噪仿真结果分析
5.4 本章小结
第 6 章 结论与展望
6.1 结论
6.2 工作展望
参考文献
攻读硕士学位期间论文发表及科研情况
致 谢
(如您需要查看本篇毕业设计全文,请您联系客服索取)