24Сʱ���Ķ�������
![]()
24Сʱ���Ķ�������
![]()
ժҪ
����������ύͨѹ��,����β��,ʯ��ȼ�ϴ����ķ�,����������Ⱦ,����������ǹ�ע�Ľ���Ҳ�ǵ��������������������,��ͳ��ͨ������������������³�������ʯ��ȼ�ϡ���Ⱦ���ܵȱ���������,����һ���µĽ�ͨ���߳���,��˫��ƽ�������������С,������ǿ,������ɫ��Դ����,��β���ŷ�,������Ⱦ������,��Ϊ�������ɵ��ص�,��չ���ȵ�,������������о�,�쳣���ӡ�����˫��ƽ����Ƹ���,����ǿ���ϡ������ԡ�ǿ���ȶ���,��ͳPID���Ʒ�ʽ���Ѵﵽ�ϺõĿ���Ч��,��˱�����������������PID���Ʋ���,�����ͳPID���Ʋ��Ե�ȱ��,ʵ���Ż����ơ�
�������IJ������Ȳ��öԳƵķ�ʽ����˫��ƽ���е���,�ڴ˿�ܻ�����,������������,�����������շ��̽���ϵͳ��ѧģ��,Ϊ�����㷨����ṩ��ʽ����,��ζ�˫��ƽ����ص�·������·��������·����ʾ��·��������·�������Ӳ���������,�Ӳ��ƽ̨,������ݸ�Ӳ��ģ�鹦��Ҫ��,�������ģ���������д���,ʹ���ܹ������������ڸô����Ӳ��ƽ̨�Ļ�����,��������㷨,�Աȴ�ͳ˫��ƽ�PID���Ʋ���,�Ľ��䲻��,��ƻ����������˫��ƽ�PID���Ʋ���,ʵ�����Ż�����,ʹ˫��ƽ�����ƽ�⡢ƽ����ʻ�ȹ�����,���ָ��ȶ�״̬��
����ͨ������˫��ƽ�ģ�ͽ��п����㷨ʵ��Ч��ʵ��֤,�Աȴ�ͳPID�����㷨����Ч��,���������ͬ������,�����ƽ��ʱ˫��ƽ���DZ仯�����Լ�ƽ������ʱ˫��ƽ������������,�Աȷ���,��֤���������Ļ���������PID�����㷨��˫��ƽ�,������߱仯��С,���и�Ϊƽ�ȡ�
�����ؼ���:ƽ�;������;PID����
Abstract
����In today's society, trafSc pressure, vehicle exhaust, consume a lot of fuel oil, air pollution, haze is liie focus of our attention is the moment we are committed to solve the problem of traditional vehicles because of its large volume, trafSc jam, consumption of fuel oil, energy and pollution problems looming, in need of a new traffic tools, and two wheeled balancing car because of its small size, strong maneuverability, the xise of green energy supply, no emissions, no pollution and many other features, has become the focus of cvirrent research, the development of hot spots, all countrin in the world to study abnormal attention. But the balance of the car wheel control is complicated, nonlinear, strong coupling, strong stability, the traditional PID control method is difficult to achieve good COtrol effect,this paper proposes the neural network PID control strategy based on the traditional PID control strategy to realize the optimization control of defects.
����This paper first establishes the two vooeeled balancing car mechanical frame adopts symmetrical way, based on the framework, stress analysis, the mathematical model was set up based on the Lagrange equation, the fonnula provided the foundation for the subsequent algorithm design, followed by the owner of two wheeled balancing control circuit, detection circuit drive circuit�� dsplay circuit power supply circuity Bluetooth and other hardware design and build the hardware platform, and thai according to the functional requirements of each module, design related software module, base so that a can work normally and in this so6 hardware platform buHt on the integrated control algorithm, compared with the traditional double balanced car PED control strategy, and improve its defects, the design of neiural network wheel balance the car PID control strategy based on the realization of optimal control of the two wheeled balancing car in self balancing, balanced driving process, To maintain a more stable state.
����The actual effect of the control algoritbm by making two wheeled balancing car model, compared with the traditional PID control algorithm to control the effect of external conditions under the same conditions, detection of self balancing two wheeled balancing car when the angle changes curve and smooth operation when the car running two wheeled balancing angle curve, comparison, verification of double balance car neural network PID control algorithm based on the the design proposed changes, smaller angle curve, operation more smoothly.
����Keywords: Balance car; neural network; PID control
���������ı�����,�ı�����,�������,������С�21������ʯ��Ϊȼ�ϵij��������ǵ��������洦�ɼ�,��������Ŀǰ���е���Ҫ��ͨ����,�������ž��õķ�չ,��������ˮƽ�����,����˽��С�γ�ҲԽ��Խ����ռ������ǵ�����������������·�ϳ����ĉ���,��Ӧ������Ҳ��֮����,�������ԡ���Ϊ���Եľ�����Ⱦ��ӵ����
����������ͳ�Ʊ���,����ÿ������ʮ�������ٶ�����ͥ�γ�,���о�����ʯ�ͻ�ʯȼ��Ϊ��Ϊ,����������β���ŷ�,�Ի�������˼������Ⱦ�������е���������������β��,��֮�������µĿ�����Ⱦ�������ء�
��������������ڴ�������β�����ŷ�,������������Խ��Խ��,PM2.5��������,���ѳ�Ϊ�������������ע�Ļ���,��վ����ܼ��Ȳ������,���ݻ�����������2016��ǰH���ȿ�����������,��������13������ǰH����ƽ����������������Ϊ60.8%,�������������������,���ܴ������ݻ�����������2016��ǰH���ȿ�����������,��������13������ǰH����ƽ����������������Ϊ60.8%,��ͬŷ���ȷ�����ҵ����������ٷ�֮��ʮ���ϱ������,��Ȼ����Զ������β���ŷ�,���µĻ�����Ⱦ,�Ӷ�������������������Ӱ�����ǵĽ������С�
���������ij�������·����,��֮������ӵ����������Ҳ��������,ÿ������°�߷���,������Զ��·��,��Ϊ�������µĵ�·ӵ��,���Dz��IJ���ǰһ����Сʱ����,ͬ�����°��{��ҲҪ����������,��Щ�ط����籱���Ϻ��ȽϷ�����г���ʱ��ռ�ϰ�ʱ�����Խ��Խ��,�������������ٷ�֮��:ʮ��
����ÿ������ij�������,�ķѼ����ʯ����Դ,�ҹ�ʯ����Դ�����ḻ,Ϊ��������,ÿ���Ի������ʯ��ȼ��,�����й�ͳ�ƾֵ�����ͳ������,����10�·��й�ʯ���ս��������ﵽ645��Ͱ,������ͬ��ʯ�͵��ս�������623��Ͱ,�й�ʯ�ͽ�Ի���ѳ�Խ����,ʹ���й������ʯ��Դ�ڹ������,�Թ���������������ԡ�
���������������,��չ����Դ����,����ʯ��ȼ��ʹ����,��������β��������Ⱦ,�������н�ͨѹ��,��������о������ˡ���ǰҲ�ǹ��Ҵ�Ϊ��չ�ķ���,�ݲ���ȫͳ��δ��������ҽ�Ͷ���������ʽ����ڻ�����Ⱦ����,����Դ���������벹�����ڴ˴�������֧�ֻ�����,�綯�����Դ�����չ,��Ϊ��ǰ�о����ȵ�,Ҳ��δ����ͨ���������ž����ҵ��ֵ��������綯�����������˫��ƽ�,���������������������γ�,�������������ŵ���Ϊ֧�ŵ�,�Զ�ƽ����������,�������С,��������Ч��Դ,��Яʱ�����ʵ��ŵ㡣
�����ڹ�ҵ����,��һ�����ҹ������ᳫ���й��������й�����ת��֮·,��������Ϊ��ҵ�������̵��Ƚ����ܴ�����,ӵ�д�����ҵ�����˿��Լ�����ҵ�����˹��ɱ�,���Ч��,��߲�ƷƷ��,���й�����ĺ�Ҳ�ؼ�����,��ͳ������ҵ,��ҵ����·����Σ��,���������ܲ���ȫ,���еͳɱ���С�ͻ������˴����˻������˴����ڹ�ҵ�������ָ���·��,����Ч�����������,���Ͱ�ȫ����,��Լ�ɱ������й�һ�㹤ҵ����������һ�����Ӵ��ϵͳ,�����ڹ�ͬЭ�������ӹ������Ʒ,��ԭ�ϻ��ڵ��ӹ�����,�ٵ���Ʒ����,��������洢����,�������ڶ���Ҫ��Ա�����Э����ͨ,��Ʒ����,����ͳ��ͨ�������������������������,������խ������ͨ��ͨ��,����·����Ը���,���������ij��������ת���,����Ա����·;��Ͻ�Զ,�������,�������һ�����С,ת�����ĵ綯������,��������������̵ij�����Ա�����ܹ����ٱ������,�ڹ���Ч���Ͻ����кܴ�����,������tU������Ĵ�����,����˫��ƽ�������������Ҫ��,�������С,ת�����,�ٶ���ԽϿ�,�ɱ��͵�,ӵ���������,������Ӧ���ڹ�ҵ����
����˫��ƽ�ĿǰӦ�÷�Χ�ܿ�,ǰ������,���ǿ��������Ƚϸ���,�����������ۺϿ��Ƶ�,�ҿ��ƹ��̾��з�����ǿ�������,����PID�����㷨Ӧ�ù㷺,�㷨����,�ṹ��,�ձ������ڵ���������ƺ͵������˶�������ϵͳ,�����ڸ���ϵͳ��һ���ľ�����,������������ܹ���ֵرƽ����ӵķ�����ϵͳ,ѧϰ����Ӧ���ز�ȷ����ϵͳ�Ķ�̬����,�Ż�����,���к�ǿ��³���Ժ��ݴ��ԡ�
�������IJ���������PID���Ʋ��ԡ����P�ۿ��ƹ����еĶ�����������Լ�ǿ���������⡣
��������˫��ƽ���·��ƣ�
DSPоƬ

ARMоƬ
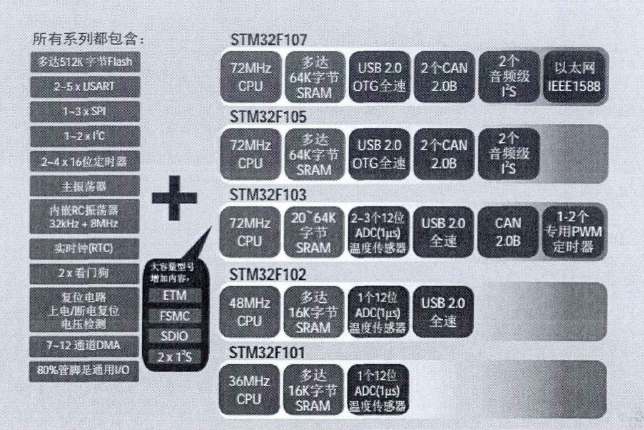
Cortex-3ϵ��оƬ��Դ
Jlink������
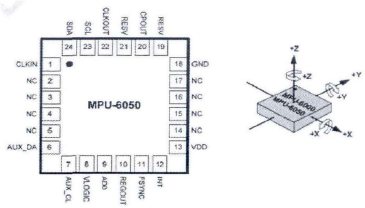
MPU6065
MPU6065ԭ��ͼ
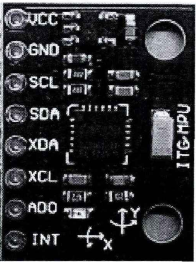
MPU6065оƬʵ��ͼ
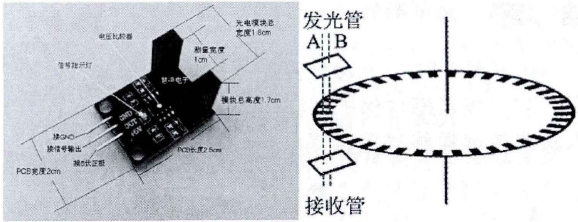
����������
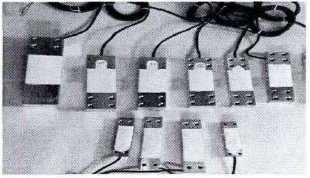
ѹ��������
Ŀ��¼
����ժ��Ҫ
����Abstract
����1������
��������1.1 �����������
��������1.2 �������о���״
������������1.2.1 ����������״
������������1.2.2 �����о���״
��������1.3 ������Ҫ��������
��������1.4 ������֯�ṹ
����2 ˫��ƽ��Ľṹ��������ѧģ�ͽ���
��������2.1 ˫��ƽ�ԭ������е�ṹ���
������������2.1.1 ˫��ƽ�ƽ��ԭ��
������������2.1.2 ˫��ƽ��ṹ���
��������2.2 ˫��ƽ���ѧģ�ͽ���
������������2.2.1 ˫��ƽ�����ϵ����
������������2.2.2 ˫��ƽ�ϵͳģ�ʹ
������������2.2.3 ˫��ƽ�ϵͳ�ٶȼ��ܶ�����
������������2.2.4 ˫��ƽ�ϵͳ״̬����
��������2.3 ������
����3 ˫��ƽ���Ӳ����·���
��������3.1 ˫��ƽ�Ӳ����·�������
��������3.2 ˫��ƽ��ص�·���
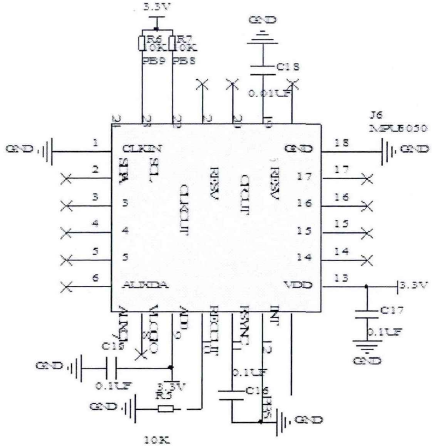
������������3.2.1 ��Сϵͳ���
������������3.2.2 ����λ��·���
������������3.2.3 JTAG��·���
��������3.3 ˫��ƽ�����·���
������������3-3.1 �����ǵ�·���
������������3.3.2 �ٶȼ���·���
������������3.3.3 ѹ������·���
��������3.4 ˫��ƽ�������·���
��������3.5 ˫��ƽ�����ģ�����
��������3.6 ˫��ƽ���Դģ�����
������������3.6.1 ��Դ��������·���
������������3.6.2 ��Դ��·���
��������3.7 ˫��ƽ���ʾģ�����
��������3.8 ������
����4 ˫��ƽ��������������㷨���
��������4.1 ˫��ƽ�������������
��������4.2 ˫��ƽ����������
��������4.3 ˫��ƽ�������·�������
��������4.4 ˫��ƽ�����ģ��������
������������4.4.1 ����ģ�����
������������4.4.2 ����ͨ������
��������4.5 ˫��ƽ����ģ��������
������������4.5.1 ��ѹģ���������
������������4.5.2 ѹ��ģ��������֭
������������4.5.3 �������ģ���������
������������4.5.4 ��̬��ⵥԪMPU6065ģ���������
��������4.6 ˫��ƽ��Ż������㷨���
������������4.6.1 ����PID����
������������4.6.2 �����������PID����
��������4.7 ������
����5 ˫��ƽ���ʵ����֤�����
��������5.1 ��ƽ����֤
��������5.2 ��ʻƽ����֤
��������5.3 ������
����6 ������չ��
��������6.1 �ܽ�
��������6.2 չ��
���������
������л
��������Ҫ�鿴��ƪ��ҵ���ȫ�ģ�������ϵ�ͷ���ȡ��
���Ŷ�ά�뱣�浽���

����ɨһɨ�����ʶ��
1.������水ť����QQ��
3008637063
2.��QQ�����Ӻ���/Ⱥ
ճ��QQ�ţ�����Ϊ����