24аЁЪБТлЮФЖЈжЦШШЯп
24аЁЪБТлЮФЖЈжЦШШЯп
еЊвЊ
ЁЁЁЁдкЙЄвЕЩњВњжаЃЌЛњаЕЪжЕФдЫгУПЩвдДѓДѓМѕЧсШЫРрЕФРЭЖЏИКЕЃЃЌЦ№ЕНСЫВЛПЩЬцДњЕФзїгУЁЃЙЄвЕЛњаЕЪжДІдкЛњаЕбЇЕШЖрбЇПЦЕФНЛВцСьгђЃЌЬхЯжСЫИїбЇПЦЕФЯШНјЫЎЦНЁЃЛљгкЩњВњМАбаОПЕФашвЊЃЌБОЮФНЋеыЖдЛљгкЕЅЦЌЛњПижЦЕФ 4R ФЃаЭЛњаЕЪжНјаабаОПЃЌЖдИУаЭЛњаЕЪжзїдЫЖЏбЇЗжЮіМАЖЏСІбЇЗжЮіЃЌШЗЖЈИУаЭЛњаЕЪжЕФдЫЖЏПижЦЗНАИЃЌЮЊЪЕМЪдЫааЬсЙЉвЛЖЈЕФРэТлвРОнЁЃ
ЁЁЁЁЖдвЛИіШЗЖЈВЮЪ§ЕФ 4R ФЃаЭЛњаЕЪжНјааМђЛЏМАВЮЪ§ЛЏЃЌЛцжЦГіЛњЙЙМђЭМЃЌНЈСЂЯЕЭГзјБъЯЕЃЌЭЦЕМГіЛњаЕЪжФЉЖЫЮЛжУЗНГЬЁЃдкЪЕМЪПижЦжаЃЌЭљЭљЪЧвбжЊЛњаЕЪжИїЪжБлВЮЪ§МАЛњаЕЪжФЉЖЫвЊДяЕНЕФЮЛжУЃЌЫљвдБОЮФЛЙНЋЖдЛњаЕЪжЯЕЭГЕФдЫЖЏЗНГЬНјааЗДЯђЧѓНтЁЃ
ЁЁЁЁдкЪЕМЪгІгУжаЃЌЭљЭљашвЊЛњаЕЪжзівЛаЉБкеЯЕФдЫЖЏВпТдЃЌЫљвдБОЮФНЋдкЛњаЕЪждЫЖЏбЇЕФЛљДЁЩЯНјааЙьМЃЙцЛЎЮЪЬтбаОПЃЌВЂЩшЖЈЛњаЕЪжФЉЖЫНјааПеМфжБЯпдЫЖЏЁЃЖдБШЖўДЮЖрЯюЪНФтКЯЗЈКЭШ§ДЮЖрЯюЪНФтКЯЗЈЕУЕНЕФЙьМЃЖдЛњаЕЪжФЉЖЫдЫЖЏОЋЖШЕФгАЯьЃЌВЂНјааЭЌНзДЮЧ§ЖЏКЏЪ§ВЛЭЌУмЖШЯИЛЏЯТЃЌЖдЙьМЃЙцЛЎЕФгАЯьЁЃ
ЁЁЁЁБОЮФвд 4R ФЃаЭЛњаЕЪжЮЊЛљДЁЃЌвд Visual Studio 2010 ЮЊПЊЗЂЦНЬЈЃЌвд AP203 ИёЪНЕФЭМаЮЮФМўЮЊЪ§ОнЃЌБржЦвЛИіЛљгк AP203 ЕФ 4R ЛњаЕЪждЫЖЏЗТецШэМўЃЌбщжЄЛњаЕЪждЫЖЏбЇЗжЮіЁЃ
ЁЁЁЁБОЮФвд 4R ФЃаЭЛњаЕЪжЯЕЭГЮЊЦНЬЈЃЌВЩгУжаЖЯПижЦЗНЪНБржЦЛњаЕЪжПижЦГЬађЃЌВЩгУVisual Studio 2010 ШэМўПЊЗЂЦНЬЈБржЦЛњаЕЪжЩЯЮЛЛњПижЦГЬађЃЌЪЕЯжЖдЛњаЕЪжЕФПижЦЁЃЭЈЙ§ЪЕбщЃЌПЩвдбщжЄЛњаЕЪждЫЖЏбЇЗжЮіЕФе§ШЗадЁЃ
ЁЁЁЁБОЮФдкЖдЛњаЕЪжНјаадЫЖЏбЇЗжЮіЕФЛљДЁЩЯЃЌдЫгУСЫ ADAMS ШэМўЦНЬЈЃЌЖдЛњаЕЪжЕФЖЏСІбЇЬиадНјааСЫЗжЮіЃЌЕУГі 4R ФЃаЭЛњаЕЪжЕФЖЏСІбЇЬиадЃЌВЂдйДЮЖд 4R ЛњаЕЪжЯЕЭГЕФЙьМЃЙцЛЎЮЪЬтНјаабщжЄЁЃ
ЁЁЁЁЙиМќДЪЃК4R ЛњаЕЪжЃЌдЫЖЏбЇЃЌAP203ЃЌЙьМЃЙцЛЎЃЌЖЏСІбЇ
Abstract
ЁЁЁЁIn industrial production, the use of mechanical hand can greatly reduce the burden of human labor, and the mechanical hand plays an irreplaceable role. The industrial manipulator combines mechanics with other disciplines, set the advanced level of various disciplines. Based on production and research needs, this paper will focus on the research of 4R model based on single chip microcomputer control, the kinematics analysis and dynamic analysis of this type of manipulator.
ЁЁЁЁFor 4R manipulator with certain parameters, the model is simplified and parametric, the diagram draw of mechanism is drawn, the coordinate system is established, and the tip position equation of the manipulator is derived. In the actual control, the parameters of the manipulator are usually known and the position of the manipulator can be achieved, so this paper will also solve the motion equation of the manipulator system.
ЁЁЁЁIn practical application, it is often required to avoid some wall obstacle, so this paper will study the trajectory planning based on robot manipulator kinematics, and set the end of the manipulator to carry out the space linear movement. The polynomial fitting method is used in this paper to find the driving function. And the influence of the trajectory of the two fitting and the three fitting on the accuracy of the manipulator end motion, and the influence of different density of the same order driving function on the trajectory planning are compared. In this paper, based on the 4R model, the software, Studio Visual 2010, is used as the development platform, and the graphics file of AP203 format are used as the data to compile the 4R manipulator motion simulation software based on AP203 which can conduct the verification of Manipulator Kinematics.
ЁЁЁЁIn this paper, the 4R manipulator model system as a platform, the method of interrupt control on the manipulator is used, by using Visual Studio 2010 software development platform, PC control software is developed to control the manipulator system, the Objective of manipulator control can be realized. Through the experiment, the correctness of the kinematics analysis on the manipulator can be verified.
ЁЁЁЁIn this paper, on the base of the completion of the manipulator kinematics analysis, the dynamic analysis of the manipulator is carried out and the dynamic characteristics of the 4R model are also obtained by using Adams. By using the platform of ADAMS, the trajectory planning problem of the 4R manipulator system is verified again.
ЁЁЁЁKey Words: 4R manipulator, Kinematics, AP203, Trajectory Planning, Dynamics
ЁЁЁЁЛњаЕЪжЃЌзїЮЊвЛжжБЛЙуЗКЪЙгУЕФЯжДњЛЏЩњВњЯпИЈжњЩшБИЃЌМЏГЩСЫЖржжбЇПЦЃЌАќРЈЃКЛњаЕбЇЃЌЕчЦјбЇЕШЖржжбЇПЦЃЌВЂЧвОпгаНЯИпЕФСщЛюадЃЌФмЙЛТњзуЩњВњЙ§ГЬжаЕФШсаджЦдьвЊЧѓЁЃЛњаЕЪжЕФНсЙЙНЯЮЊИДдгЃЌЕЋзмЬхЩЯЫЕжївЊгЩЛњаЕЪжжїЬхЃЌЧ§ЖЏЯЕЭГМАПижЦЯЕЭГзщГЩЃЌЦфжаЛњаЕжїЬхПЩгЩЛњаЕЪжЕФЭЮВПЃЌЛњаЕЪжЕФЪжБлЃЌЛњаЕЪжЕФЭѓВПКЭЛњаЕЪжЕФжДааЛњЙЙзщГЩЁЃ
ЁЁЁЁЙЄвЕЛњаЕЪжЕФжДааЛњЙЙЪЧЛњаЕЪжЭъГЩИЈжњЩњВњЕФживЊЛњЙЙЃЌЦфжївЊЕФНсЙЙАќРЈШ§жжаЮЪНЃКЛњаЕЪНМаГжЦїаЭжДааЛњЙЙЁЂПЩЮќИНЪНжДааЛњЙЙвдМАПЩаЏДјзЈгУЙЄОпЕФжДааЛњЙЙЁЃЙЄвЕЛњаЕЪжЕФЧ§ЖЏЯЕЭГгаЫФжжГЃгУБэЯжаЮЪНЃКгУвКбЙЧ§ЖЏЕФЧ§ЖЏЯЕЭГЁЂгУЦјбЙЧ§ЖЏЕФЧ§ЖЏЯЕЭГЁЂЕчЦјЧ§ЖЏЯЕЭГвдМАЛњаЕЧ§ЖЏЕФЧ§ЖЏЯЕЭГ[2]ЁЃЦфжавдвКбЙЧ§ЖЏЯЕЭГКЭЦјбЙЧ§ЖЏЯЕЭГгІгУНЯЮЊЙуЗКЁЃзїЮЊЙЄвЕЛњаЕЪжЕФПижЦжаЪрЃЌЛњаЕЪжЕФПижЦЯЕЭГПЩвдИљОнОпЬхЕФЩњВњашвЊЃЌПижЦЙЄвЕЛњаЕЪждЫЖЏЕНжИЖЈЕФЙЄЮЛЃЌЭъГЩЯргІЕФЖЏзїжИСюЁЃЛњаЕЪжЕФПижЦЯЕЭГМШПЩвдПижЦЛњаЕЪжЭъГЩНкХФЪНЩњВњЃЌЭъГЩВњЦЗЕФДѓЙцФЃЩњВњЃЌгжФмЭЈЙ§ИќИФФкжУГЬађЃЌЭъГЩШсадЛЏжЦдьЁЃ
ЁЁЁЁЙЄвЕЛњаЕЪжОпгавдЯТМИИіЬиЕуЃК
ЁЁЁЁ(1)ПЩБрГЬЛЏЁЃЙЄвЕЛњаЕЪжЕФПижЦЯЕЭГПЩвдЭЈЙ§ИќИФФкжУПижЦГЬађЃЌДяЕНШсадЛЏЩњВњЕФФПЕФЁЃЙЄвЕЛњаЕЪжПижЦЕЅдЊЕФПЩБрГЬадМШПЩвдЪЙжааЁаЭЦѓвЕОпгаШсаджЦдьЕФФмСІЃЌФмЙЛИќКУЕигІЖдаЁХњСПЩњВњЃЌгжПЩвдЪЙЦѓвЕЭъГЩГЬЪНЛЏЕФДѓЙцФЃЩњВњЁЃ
ЁЁЁЁ(2)ЭЈгУадЁЃдкДѓХњСПЩњВњжаЃЌЙЄвЕЛњаЕЪжЕФЭЈгУадПЩвдЮЊЦѓвЕНкЪЁДѓСПзЪН№ЃЌВЂЧвПЩвдЬсИпЦѓвЕЕФЩњВњаЇТЪЁЃЦѓвЕПЩвдЭЈЙ§ИќЛЛЛњаЕЪжФЉЖЫжДааЛњЙЙРДТњзуИїаЭКХВњЦЗЕФИЈжњЩњВњЁЃ
ЁЁЁЁ(3)ЙЄвЕЛњаЕЪжЕФбаОПСьгђДІгкЛњаЕбЇЃЌЕчзгаХЯЂбЇЃЌЕчЦјбЇЕШИїбЇПЦЕФНЛВцЕиДјЁЃ
ЁЁЁЁвђДЫЃЌЙЄвЕЛњаЕЪжММЪѕЗЂеЙашвЊИїбЇПЦЭЌЪБЗЂеЙЃЌаЭЌзїгУ[3]ЁЃЭЌЪБЃЌЙЄвЕЛњаЕЪжЕФЗЂеЙвВПЩвдДйНјвдМАМьбщИїбЇПЦЗЂеЙЫЎЦНЃЌЪЕЯжИїбЇПЦЭЌЪБНјВНЁЃ
ЁЁЁЁдкЙЄвЕЛЏЩњВњжаЃЌЙЄвЕЛњаЕЪждкИїСьгђжаЖМЗЂЛгСЫОйзуЧсжиЕФзїгУЁЃЙЄвЕЛњаЕЪжВЛНіПЩвдШУВњвЕЙЄШЫДгЗБжиПндяЕФСїЫЎЯпЩњВњжаНтЭбГіРДЃЌЛЙПЩвдАДееЩњВњЙЄвевЊЧѓЃЌНјааИпаЇЕФДѓХњСПЩњВњКЭВњЦЗЕФаЁХњСПЪджЦЃЌЬсИпСЫЩњВњЦѓвЕЕФЩњВњаЇТЪЁЃдкЖёСгЕФЙЄПіЬѕМўЯТЃЌЙЄвЕЛњаЕЪжПЩвдНјааЮоШЫЛЏзївЕЃЌДѓДѓЕиЬсИпЩњВњШЫдБЕФзївЕАВШЋадЃЌЪЕЯжАВШЋЩњВњЁЃ
ЁЁЁЁдкЙЄвЕЛњаЕЪжЕФЩшМЦгыПижЦжаЃЌЖдЛњаЕЪжНјаадЫЖЏбЇЗжЮіКЭЖЏСІбЇбаОПЪЧЩшМЦПижЦЛњаЕЪжЕФЙиМќММЪѕ[7]ЁЃЬНОПЛњаЕЪждЫЖЏбЇПЩвдПижЦЛњаЕЪжЕНДяжИЖЈЕФЮЛжУЃЌЖјбаОПЛњаЕЪжЖЏСІбЇЮЪЬтПЩвдНтОіЛњаЕЪжЧ§ЖЏСІОиЮЪЬтЁЃдкЙЄвЕЩњВњжаЃЌЭљЭљашвЊЙЄвЕЛњаЕЪжзіЬиЖЈЙьМЃдЫЖЏЛђепЪЧБкеЯЙІаЇЁЃЖјЬиЖЈЙьМЃПЩвдЭЈЙ§ЪБМфЧјМфФкЕФжБЯпФтКЯЕУЕНЃЌЫљвдЛњаЕЪжЕФжБЯпдЫЖЏЪЧжюЖрЬиЖЈЙьМЃдЫЖЏЕФЛљДЁЁЃбаОПЙЄвЕЛњаЕЪжЕФЖЏСІбЇЮЪЬтЃЌПЩвдОіЖЈЙиНкЧ§ЖЏЕчЛњЕФзюаЁЧ§ЖЏСІОиЃЌЗНБудкЩшМЦНзЖЮбЁдёЯргІЕФЧ§ЖЏЕчЛњЁЃЭЈЙ§ЗжЮіЛњаЕЪжЕФЖЏСІбЇЬиадРДЬсИпЛњаЕЪжПижЦЦЗжЪЃЌвдЪЕЯжИќОЋШЗЕФЙьМЃИњзйЃЌвдЦкДяЕНЛњаЕЪжЕФзюгХадФмКЭзюгХПижЦ[8]ЁЃ
ЁЁЁЁБОЮФвдЛљгкЕЅЦЌЛњЮЊПижЦЯЕЭГЕФ 4R ФЃаЭЛњаЕЪжНјаабаОПЃЌШчЭМ 1.2 ЫљЪОЁЃбаОПЛњаЕЪжЕФдЫЖЏбЇРэТлЃЌВЂвд Visual Studio 2010 ЮЊЦНЬЈБржЦдЫЖЏбЇЗТецШэМўЖдЧѓНтГіЕФдЫЖЏбЇРэТлМгвдбщжЄЁЃГ§ДЫжЎЭтЃЌБОЮФЛЙНЋНјааЕЅЦЌЛњГЬађЕФБржЦЃЌдкдЪаэЕФЮѓВюЗЖЮЇФкЖдЛњаЕЪждЫЖЏбЇРэТлНјааЪЕР§бщжЄЁЃБОЮФвддЫЖЏбЇРэТлЮЊЛљДЁЃЌНЋЖд 4R ЛњаЕЪжНјааПеМфжБЯпЙьМЃЙцЛЎЁЃБОЮФЛЙНЋЖд 4R ФЃаЭЛњаЕЪжНјааЖЏСІбЇЗжЮіЃЌЗжЮіЯЕЭГдкПеМфжБЯпЙьМЃЙцЛЎдЫЖЏЯТИїЙиНкгІЬсЙЉЕФзюаЁзЊОиЃЌЗНБуНјааЪЕМЪЛњаЕЪжЩшМЦжабЁШЁЕчЛњВЮПМЁЃ
ЁЁЁЁ4RЛњаЕЪждЫЖЏЙьМЃЙцЛЎМАдЫЖЏПижЦбнЪОЃК
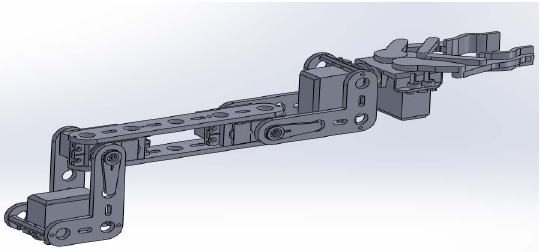
Solidworks жаЛњаЕЪжФЃаЭ
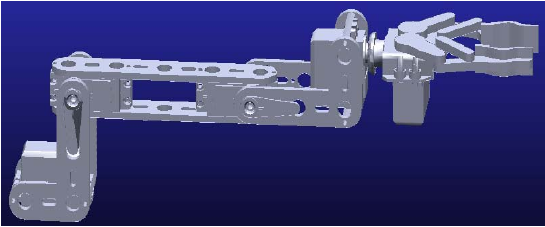
ADAMS жаЛњаЕЪжФЃаЭ
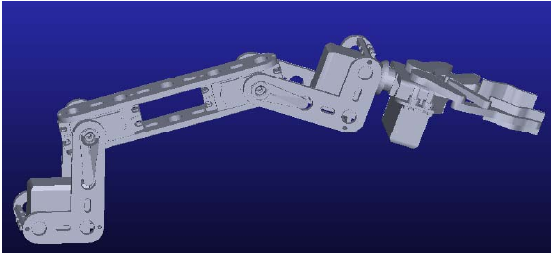
ADAMS дМЪј
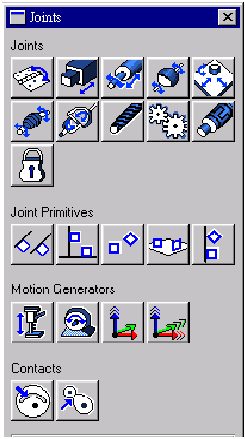
ЛњаЕЪжЮЛжУ
ЛњаЕЪжЙьМЃ
ФПТМ
ЁЁЁЁеЊвЊ
ЁЁЁЁAbstract
ЁЁЁЁЕк 1 еТ аїТл
ЁЁЁЁЁЁЁЁ1.1 ПЮЬтбаОПБГОА
ЁЁЁЁЁЁЁЁ1.2 ЙњФкЭтЛњаЕЪжЗЂеЙЯжзД
ЁЁЁЁЁЁЁЁЁЁЁЁ1.2.1 ЙњЭтЛњаЕЪжЗЂеЙЯжзД
ЁЁЁЁЁЁЁЁЁЁЁЁ1.2.2 ЙњФкЛњаЕЪжЗЂеЙЯжзД
ЁЁЁЁЁЁЁЁЁЁЁЁ1.2.3 ПЮЬтРДдДМАбаОПвтвх
ЁЁЁЁЕк 2 еТ 4R ЛњаЕЪждЫЖЏбЇЗжЮі
ЁЁЁЁЁЁЁЁ2.1 ЛњаЕЪждЫЖЏбЇИХФю
ЁЁЁЁЁЁЁЁ2.2 4R ЛњаЕЪждЫЖЏбЇЗжЮі
ЁЁЁЁЁЁЁЁЁЁЁЁ2.2.1 4R ЛњаЕЪждЫЖЏбЇе§ЮЪЬтЗжЮі
ЁЁЁЁЁЁЁЁЁЁЁЁ2.2.2 4R ЛњаЕЪждЫЖЏбЇФцЮЪЬтЗжЮі
ЁЁЁЁЁЁЁЁ2.3 БОеТаЁНс
ЁЁЁЁЕк 3 еТ 4R ЛњаЕЪжЙьМЃЙцЛЎЗТецШэМўбаОП
ЁЁЁЁЁЁЁЁ3.1 AP203 ИХФюНщЩм
ЁЁЁЁЁЁЁЁ3.2 ЭМаЮЮФМўНтЮі
ЁЁЁЁЁЁЁЁ3.3 ЭМаЮЮФМўжиЙЙ
ЁЁЁЁЁЁЁЁ3.4 ЙьМЃЙцЛЎ
ЁЁЁЁЁЁЁЁЁЁЁЁ3.4.1 ЖўДЮЖрЯюЪНФтКЯ
ЁЁЁЁЁЁЁЁЁЁЁЁ3.4.2 Ш§ДЮЖрЯюЪНФтКЯ
ЁЁЁЁЁЁЁЁЁЁЁЁ3.4.3 ЕШЗжУмЖШЗжЮі
ЁЁЁЁЁЁЁЁ3.5 БОеТаЁНс
ЁЁЁЁЕк 4 еТ 4R ЛњаЕЪж ADAMS ЖЏСІбЇЗТец
ЁЁЁЁЁЁЁЁ4.1 ADAMS ШэМўМђНщ
ЁЁЁЁЁЁЁЁ4.2 ЖЏСІбЇЫуЗЈМђНщ
ЁЁЁЁЁЁЁЁ4.3 ADAMS ФЃаЭЕМШы
ЁЁЁЁЁЁЁЁ4.4 ADAMS НЈСЂдМЪјЬѕМў
ЁЁЁЁЁЁЁЁ4.5 ADAMS Ч§ЖЏЬѕМў
ЁЁЁЁЁЁЁЁ4.6 ЙьМЃЙцЛЎдк ADAMS ШэМўЯТбщжЄ
ЁЁЁЁЁЁЁЁ4.7 БОеТаЁНс
ЁЁЁЁЕк 5 еТ 4R ФЃаЭЛњаЕЪжЪЕбщЪЕЯж
ЁЁЁЁЁЁЁЁ5.1 ЪЕбщЛЗОГМђНщ
ЁЁЁЁЁЁЁЁ5.2 4R ЛњаЕЪждЫЖЏбЇЪЕбщ
ЁЁЁЁЁЁЁЁ5.3 БОеТаЁНс
ЁЁЁЁЕк 6 еТ НсТлгыеЙЭћ
ЁЁЁЁЁЁЁЁ6.1 НсТл
ЁЁЁЁЁЁЁЁ6.2 еЙЭћ
ЁЁЁЁВЮПМЮФЯз
ЁЁЁЁдкбЇбаОПГЩЙћ
ЁЁЁЁжТаЛ
ЃЈШчФњашвЊВщПДБОЦЊБЯвЕЩшМЦШЋЮФЃЌЧыФњСЊЯЕПЭЗўЫїШЁЃЉ