24小时论文定制热线
24小时论文定制热线
摘要
四旋翼飞行器是通过对多传感器数据的融合和解算,获取出自身的姿态欧拉角,进而通过PID控制器控制四个带螺旋奖的电机,使其完成垂直起飞、息停、自由飞行等动作。四旋翼飞行器涉及多学科的融合,包括自动控制技术、微电子技术、多传感器融合技术、电机学、空气动为学等技术,具有非常高的研究价值。
而且,因为它的体积小、灵活方便等特性,现在在许多应用领域都开始出现它的身影,如航拍、侦査、测绘、运输等,应用前景十分广阔。
本文的工作主要是针对飞行器控制和视频传输的距离限制问题,提出了一种基于嵌入式Linux, 3G网络和STM32控制器的飞行器传输控制系统。
论文主要研究内容如下:
1:系统总体设汁及硬件平台。完成对系统概况的介绍和硬件平台的选择,采用ARM9+STM32的硬件架构,保证了系统的稳定和实时性,选择了开发所需的丹发板,摄像头型号,3G传输的制式和模块的型号,W及选择嵌入式Linux作为传输的系统。
2:四旋翼飞行器设计。主要完成STM32下驱动的开发,完成对MPU6050和HMC5883的读数,基于四元数的数据融合和姿态解算,并利用经典PK)控制器完成对飞行器的稳定控制。
3:嵌入式Linux的移植。根据开发板的硬件平台和实际应用,完成对嵌入式Linux内核的裁剪、配置和编译,编译了 Bootloader启动程序,制作了 yaffs2文件系统。
4:系统应用软件的设计。完成对视频服务器应用软件Mjpg-streamer和Web服务器的搭建和移植,完成对STM32控制端口的驱动开发和应用程序,编译移植了 3G网卡驱动,完成了 3G拨号上网脚本,完成了基于C#的上位机控制程序的编写。
关键词:四旋翼飞行器;嵌入式Linux; 3G视频传输
ABSTRACT
Quad-rotor aircraft is through the multi-sensor data fusion solves for their own state,to control the four motors with a propeller,to complete the vertical takeoff,hover,free night and otoer activities .Quad-rcrtor aircraft involved in mcrtor leaming,aerodynamics,automatic control science and other tochniques to broaden its research value and range. Moreover , because of its small size ,flexible ,easy to carry and other features,and now are beginning to appear in its pi*esence in many application areas ,such as aerial phcrtography ,reconnaissance ,mapping and otoer,very broad application prospects.
The main work of this paper is to limit the problem of aircraft control and video transmission distance for the proposed based on embedded Linux , 3G network and aircraft controllers STMS 2 transmission control system.
1: System design and hardware platforms. Compleb overview of the system and hardware platfbrm of choice introduced, using ARM9+STM32 hardware architocture,ensuring 1:he stability of the system and real-time,chose to develop the i*equii:ed model development board , camera model,3G transmi巧ion standard and modules ,as well as the transport of choice for embedded Linux system.
2: The four-rcrtor design. Mainly to complete the driving STM3 2 development, complete MPU6050 and HMC5883 readings quaternion based data integration and attitude solution and using cascade PID control of toe aircraft to complete toe stable.
3: Embedded Linux transplant. According to board's hardware platfbrm and application,complex embedded Linux kernel cutting, configuration and compilation, compiled Bootloader start the program,produced yaffs2 file system.
4: System application software design. Completion of toe video server application software to build and porting Mjpg-streamer and web servers, completo STM32 control port driver development and applications,compiled transplanted 3G network card driver, complete 3G dial-up script, complete C# based PC write control program.
Keywords: Four-rotor; Embedded Linux; 3G Video Transmission
无人飞行器(UAV)是一种利用空气提供升力,不需要载人操作,可W自主飞行或者用无线遥控控制飞行,可一次使用或可回收的飞行装置W。近几年得益于微电子、信息技术、材料、电池等技术的发展,无人机正被广泛的应用在军事领域和民用领域。军事上凭借其灵活、起降简单、造价低廉、隐蔽性好等特点,在情报侦查、空中支援作战、电子站任务等都逐渐开始发挥其重要作用;民用上在通信中继、喷洒农药、运输、火灾抢险、摄影、测绘等领域作用逐渐凸显W。
无人飞行器大致可分为固定翼和旋翼两种。虽然固定翼发展较旋翼早很多,但旋翼飞行器因其灵活多变,可悬停、垂直起降、翻滚等特性越来越受到欢迎,尤其是多旋翼飞行器相比较直升机而言不需要多余的螺旋浆来抵消反扭力矩,更不需要开发者研究学习复杂的空气动力学设计和对旋翼浆距的多重调节等专业知识因此近几年来多旋翼飞行器得到了长足的发展。虽然得益于微电子技术的进步、传感器工艺的提、电池续航能力的提升、动力装置的改善和新材料的应用,使得多旋翼飞行器无论在性能还是自主控制方面都有很大的提升但受制于无线距离和载重等方面的影响,多旋翼飞行器在控制距离和传输距离上一直没有突破。
本文试图通过利用当前成熟的通讯网络(3G),把飞行器接入互联网,来突破当前尤其是民用领域对飞行器控制和传输的距离限制,实现随时、随地对飞行器的控制。并通过搭建嵌入式Linux平台,把整个系统实现在一个稳定、高效的平台系统之上,更加方便于系统的后期开发和改进W及集成的稳定高效。
国外对四旋翼飞行器的研究较早。20世纪初的时候,一位名叫Charles Richet的法国科学家就研制出一个微型旋翼飞行器;其学生在1906年制造了第一架载人的直升机,虽然飞行髙度只有1.5m;年,GeorgeDeBothezat与美国军方合作研制出一架大型的四旋翼直升机,但因存在的问题一直无法解决而放弃;1M6年,Convertawing对四旋翼飞行器机械结构进行了改进,优化了控制算法,四旋翼飞行器取得了成功W。此阶段的飞行器都是人为控制,其稳定性和操作性都非常差,受限于技术发展等原因,此后的几十年间,多旋翼飞行器的发展一直停滞不前。
直到二十一世纪,随着微电子技术、惯性技术、控制科学与理论、材料学、电机等技术的进步和发展,多旋翼飞行器也得到了快速的发展进步。
国外对四旋翼飞行器研究的院校和机构较多,包括斯坦福大学,麻神理工大学,宾夕法尼亚大学等。其中宾夕法尼亚大学GPASPS实验室设计的四旋翼飞行器通过安装的摄像头惯性传感器及红外的判断姿态和位置,能够实现室内稳定的飞行、悬停、翻滚、避障等动作。
美国知名的Draganflyer是制造定位于航拍的多旋翼飞行器额公司。其最新产品DranganflyerX4-P,大小为87x87x30cm,最大起飞载重可达2470g,其飞行高度可达2428m,一次充电可飞行20-25分钟,可实现自动起飞,自动巡航,定点等功能。
亚马逊公式是美国最大的电子商务平台,在自动化和智能化的仓储、分栋和运输等领域都处于行业领先和引领的地位。其在2013年就提出用无人机递送服务,其研发多的多旋翼飞行器可W每小时80公里的速度飞化并最多可携带2.2公斤的货物。顾客从下单到取货只需30分钟。
国内研究起步较晚,但近年来也有许多大学和科研机构开始关注并研究多旋翼飞行器,并取得不错的进展和成果,如哈尔滨工业大学,北京航空航天大学,南京航空航天大学,清华大学,国防科技大学,山东大学等。我国北京航空航天大学的张博翰利用双目视觉的灰度立体匹配的方法实现无人机室内走廊飞行,包括横向位置标定,检测障碍物等W。
国际空中机器人大赛始创于1991年,2012年首次在中国设立亚太赛区,与美国赛区同步进行。按照比赛规程,空中机器人需自主完成极具挑战性的任务。
目前为第6巧任务,背景是潜伏于某情报机构的特工称一份拟破坏全球安全的机密计划书藏匿于某偏远小镇的一个安全机构中,该特工已经侦测到该机构有一个安全缺口,计划用一架小型自主飞行器潜入该机构核也部位,窃取相关机密信息。
该任务于2013年亚太赛区的比赛之中被清华大学代表队完成W,其在德国Ascending Technologies GmbH公司生产的Pelican四轴飞行器的基础之上,主要利用向前的摄像头,向下的摄像头W及激光雷达等利用WIFI传输到地面,进行数据处理。
商业上,国内的大疆(DJI)是比较成功的多旋翼研发制造公司。从无人机飞控系统到整体航拍方案、从多轴云台到高清图传,DJI大疆创新以“飞行影像系统”为核也发展方向,其产品已被广泛用于航拍、电影、农业、地产、新闻、消防、救援、能源、遥感测绘、致生动物保护等领域,并不断地融入新的行业应用。
3G网络四旋翼飞行器软件设计:
用电脑浏览器看到的视频流
在平板电脑浏览器看到视频流
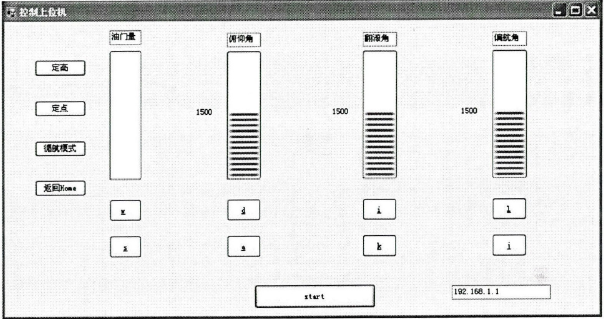
上位机界面图
VMware虚拟机下安装的红帽企业版6Linux系统
Linux桌面
登陆SMB服务器后的共享文件
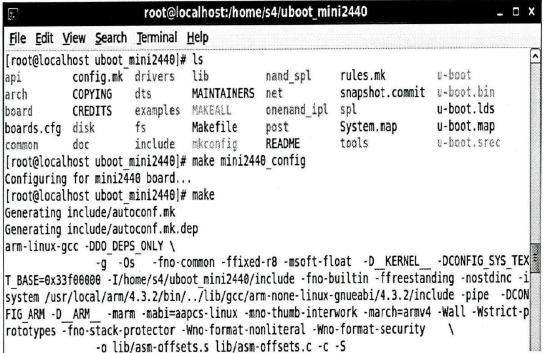
编译u-boot
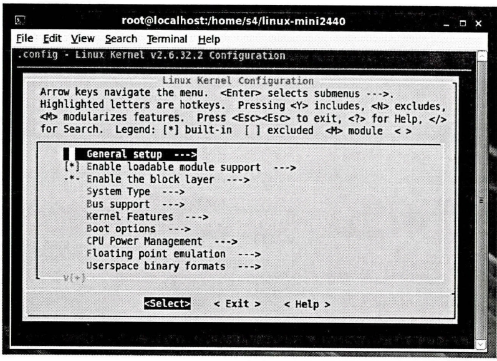
Linux内核配置菜单
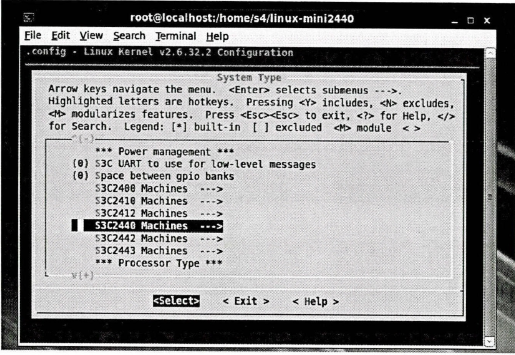
在菜单中选择S3C2440类型
目录
摘要
ABSTRACT
第一章 绪论
1.1 课题背景及意义
1.2 四旋翼飞行器国外国内研究现状
1.2.1 国外研究
1.2.2 国内研究
1.3 论文研究的内容
第二章 系统总体设计和软件平台
2.1 系统总体设计架构
2.2 系统硬件设计方案
2.2.1 开发板
2.2.2 摄像头
2.2.3 3G 网卡
2.2.4 飞控模块
2.3 本章小结
第三章 四旋异飞行器设计
3.1 四旋翼飞行器飞行原理
3.2 四旋翼飞行器总体设计
3.2.1 主控芯片
3.2.2 惯性模块
3.2.3 气压髙度计
3.3 数据融合和姿态解算
3.4 经典PID控制
3.5 本章小结
第四章 嵌入式Linux系统的搭建
4.1 引言
4.2 开发环境的建立
4.2.1 安装 Red Hat Enterprise Linux 6
4.2.2 Windows 和 Linux 文件共享
4.2.3 NFS服务器搭建
4.2.4 安装交叉工具链
4.3 U-boot移植和编译
4.3.1 U-boot 体系结构
4.3.2 U-boot 移植过程
4.4 嵌入式Linux系统内核移植和根文件系统
4.5 本章小结
第五章 系统软件设计
5.1 Mjpg-streamer 移植
5.1.1 Mjpg-streamer简介及系统结构
5.1.2 Mjpg-streamer 移植
5.2 3G拨号上网的实现
5.2.1 3G网卡模块驱动移植
5.2.2 拨号上网实现
5.3 上位机设计
5.4 Linux系统控制应用程序和驱动程序的实现
5.4.1 驱动程序
5.4.2 应用程序
5.5 本章小结
第六章 总结与展望
6.1 总结
6.2 展望
参考文献
致谢
(如您需要查看本篇毕业设计全文,请您联系客服索取)