24小时论文定制热线
24小时论文定制热线
摘要
精密减速器因其具有传动比变化范围大、结构紧凑、精度高等特点,广泛的应用于工业机器人、数控装备、航空工业等精度要求高的场合。本文针对工业机器人用减速器的使用要求,对工业机器人常用减速器如RV、谐波等的综合性能参数检测的方法进行了研究,并开发出一套测试系统。该系统主要完成精密减速器传递精度、背隙、扭转刚度、回差、机械效率、启停转矩、空载摩擦转矩等性能的测量。通过大量的实验数据对被测减速器的性能参数进行评估,对减速器设计制造有一定参考意义。本文依据减速器的测试要求,基于虚拟仪器技术并围绕对减速器性能参数的检测设计了一套综合测试系统,主要内容有:
1.首先分析了工业机器人用精密减速如RV、谐波等的主要性能参数,然后参考国家标准和目前国内外常见测试的方法,确定出本系统减速器各参数的试验方法和计算方法。
2.根据精密减速器的测试要求,基于MATLAB/Simulink建立减速器输入/输出端的动态模型,重点分析机械结构对减速器加载端扭矩波动的影响。
3.结合虚拟仪器技术,基于LabVIEW图形化编程语言,设计出一个可对整个测试过程进行控制和监控的人机界面,主要包含软件架构的设计以及各子模块的设计如电机控制模块、数据釆集模块等。
经近一年调试,该系统已在己有测试平台上进行了测试,试验效果良好,实现了预期功能。
关键词:精密减速器,性能参数,LabVIEW,Simulink
Abstract
Due to its wide range of transmission ratios, compact structure and high precision, precision retarders are commonly used in applications such as industrial robots, numerical control equipment and aerospace industries that require high accuracy. Aiming at the requirements of the use of speed reducers for industrial robots, a set of test systems is developing that can achieve measure about comprehensive performance parameters of Precision Reducer, Such as RV and harmonics for industrial robots. The system mainly completes the measurement of the transmission precision, backlash, torsional stiffness, hysteresis, mechanical efficiency, start-stop torque and no-load friction torque performance of the precision reducer. Based on a large number of experimental data to evaluate the performance parameters of the tested speed reducer, it can be used as a reference for the design .This paper build a test platform based on the test requirements of the reducer and designs a comprehensive test system based on the virtual instrument technology and testing the performance parameters of the reducer. The main contents include the following aspects.
1.Firstly, the main performance parameters of industrial robots such as RV, harmonics, etc. are analyzed. Then, reference is made to the national standards and common test methods at home and abroad to determine the test methods and calculation methods for each parameter of the system reducer.
2.According to the test requirements of the precision reducer, the dynamic model of the input/output of the reducer is established based on MATLAB/Simulink and the influence of the mechanical structure on the torque fluctuation of the reducer load end is analyzed.
3.Combining virtual instrument technology and LabVIEW graphical programming language, a human-machine interface that can control and monitor the entire test process is designed, it mainly including the design of software architecture and the design of each sub-module such as motor control module, data acquisition module, etc.
After nearly a year of debugging, the system has been tested on the existing test platform. The test has achieved good results and achieved the expected function.
Key words: Precision Reducer,Performance Parameter , Lab VIEW, Matlab/Simulink.
生活中,常见的机械传动主要有带传动、齿轮传动等形式,减速器是以齿轮啮合的形式来实现速度精确转化和扭矩传递,因其传动比可变范围大、精度高、结构紧凑等特点使其在现代机械工业中广泛应用。进入21世纪以来,随着德国“工业4.0”概念和国内“中国制造2025”战略的提出,制造业的改革已取得巨大成就,中国己经成为世界工业机器人最大的制造和使用国,并持续保持20%-30%的年增长量,截止2017年底,全国工业机器人的销售量己突破8万台。根据规划到2020年工业机器人的密度达到150台左右'更加有利于制造业向智能化的快速转变。
虽然目前我国在工业机器人的研发、制造等领域相比过去己取得巨大进步,但在核心部件如伺服电机、减速机、控制系统等方面相比日本、德国依然存在巨大的差距,尤其在占机器人本体成本30%以上的精密减速器领域,长期以来一直被日本和德国垄断,严重制约了我国机器人的发展。精密减速器作为我国发展机器人的重要环节之一,性能的好坏直接决定了机器人的质量[24]。RV、谐波和行星减速器作为常见的机器人用减速器,主要起到降低转速和增大扭矩的作用。通常情况下,在受力较大关节处一般使用RV减速器,谐波减速器用于受力较小的关节处。精密减速器的性能主要包括传递精度、背隙、扭转刚度、机械效率、回程误差、启停转矩、空载摩擦转矩等参数指标。
目前,国内很多厂家都己经开始对精密减速器的研发和制造,如秦川机床厂、南京尼康、苏州绿地等,己取得不错的成就,相当一部分产品已经应用到工业机器人本体中[5]。但对精密减速器制造、测试的研发一直处于落后状态,已经阻碍了我国精密减速器领域的发展[6]。针对目前存在的对工业机器人用减速器性能参数测试系统的缺点和不足如测试参数单一、精度低、效率低且测试系统不易维护、升级困难等特点,设计一套自动化程度高、易于维护升级、集多种试验功能精密减速器综合性能检测的测试系统是十分必要的。
本课题主要是研制一套机器人用精密减速器性能参数测试系统,采用虚拟仪器技术,实现对精密减速器传递精度、背隙、回差、刚度、机械效率等参数的检测。硬件部分,合理选择测试器件并设计系统结构;软件部分采用虚拟仪器技术,基于LabVIEW图形化编程语言设计出具有良好人机交互的试验界面,对整个试验过程进行控制并实时监控。用户只需根据自身实际需求,利用软件傻瓜化的操作方式,即可完成各参数的测量任务。该系统可实现数据的自动存储和查询,提高了测试效率。测试结果对减速器的生产厂家的设计和制造具有一定的参考意义。
本测试系统主要是针对工业机器人常用减速器如RV、谐波等的综合性能参数检测的系统,该系统可完成减速器基本参数如传递误差、背隙、回程误差等的性能检测并计算出相应结果和绘制结果图形,试验过程中对实验数据实现实时存储以及可对试验历史进行查询。通过对测试结果的分析来评定该型减速器的综合性能以及验证该参数试验方法的可行性,可以为减速器制造商提供实际的参考数据和设计依据。
实现对国产减速器性能参数的有效、正确检测是影响我国减速器行业发展的重要因数之一。早期国外的研究机构主要是对常见传动装置如齿轮传动箱进行测试,测试的内容主要为表面疲劳特性、热力学、动力学等性能的检测。与国外相比,国内对于减速器的研宄起步较晚,直至上世纪60年代后期,国内开始引进国外技术如摆线针减速器的运动学、动力学方程,正式系统的深入研究减速器性能,减速器测试系统也随之逐渐发起来。
精密减速器测试系统设计:
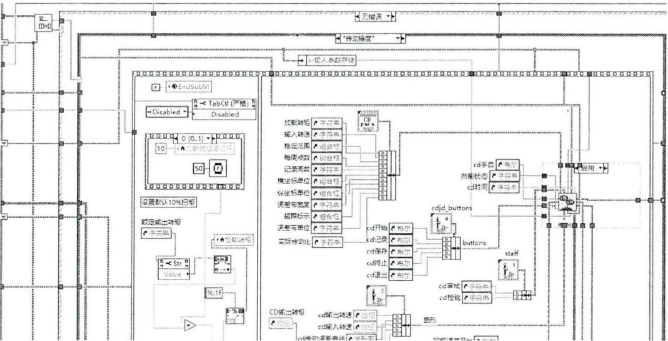
人机界面部分程序
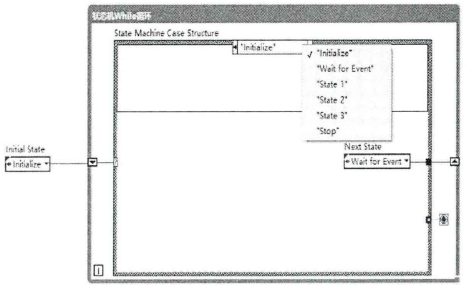
标准状态机架构
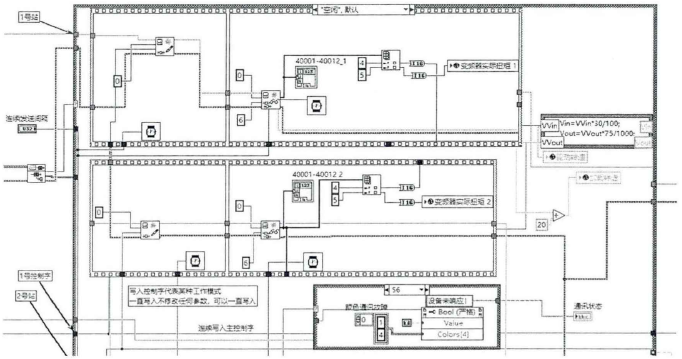
驱动电机部分程序
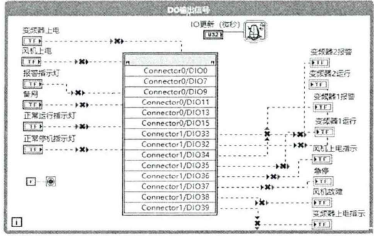
数字量控制程序
FPGA采集卡
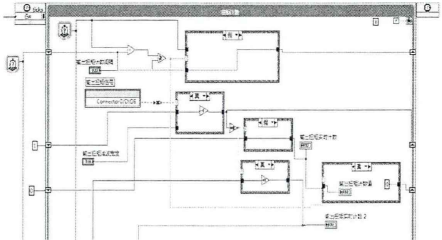
部分扭矩采集程序
目录
摘要
ABSTRACT
第一章 绪论
1.1 课题研究的背景及意义
1.2 精密减速器测试系统概述
1.2.1 精密减速器测试系统的发展
1.2.2 精密减速器测试系统的研宄现状
1.3 论文研究的主要内容
1.4 本章小结
第二章 精密减速器性能参数试验方法
2.1 常见的精密减速器结构及工作原理
2.1.1 谐波齿轮减速器
2.1.2 RV减速器
2.2 精密减速器综合性能参数试验方法
2.2.1 传递精度
2.2.2 背隙及刚度
2.2.3 回程误差
2.2.4 空载摩擦转矩
2.2.5 启停转矩
2.2.6 机械效率
2.3 本章小结
第三章 测试系统的建模与仿真
3.1 测试系统龄体概述
3.1.1 测试系统的仪器组成
3.1.2 测试系统的工作过程
3.2 试验台控制系统的建模
3.2.1 试验台机械结构的建模
3.2.2 电机控制系统的建模
3.2.3 减速器理论模型
3.2.4 控制系统的仿真模型
3.3 本章小结
第四章 测试系统的软件设计
4.1 软件功能与架构设计
4.1.1 软件功能
4.1.2 软件架构设计
4.2 控县统设计
4.2.1 电机控制系统设计
4.2.2 电源控制系统设计
4.3 数据采集系统设计
4.3.1 传递误差设计
4.3.2 背隙刚度设计
4.3.3 回程误差设计
4.3.4 其他
4.4 数据管理系统的设计
4.4.1 数据库系统设计
4.3.2 测试报表设计
4.5 测试流程设计
4.5.1 传递误差试验流程设计
4.5.2 背隙刚度试验流程设计
4.5.3 回程误差试验流程设计
4.5.4 空载摩擦转矩试验流程设计
4.5.5 启停转矩试验流程设计
4.5.6 机械效率试验流程设计
4.6 本章小结
第五章 测试系统试验结果和分析
5.1 试验类型测试结果
5.1.1 传递误差试验
5.1.2 背隙刚度试验
5.1.3 回程误差试验
5.1.4 空载摩擦转矩试验
5.1.5 启转矩停试验
5.1.6 机械效率试验
5.2 试系统性能分析
5.3 本章小结
第六章 总结与展望
6.1 全文总结
6.2 课题展望
参考文献
致谢
(如您需要查看本篇毕业设计全文,请您联系客服索取)