24小时论文定制热线
24小时论文定制热线
摘 要
预制混凝土装配式建筑因其符合绿色建筑要求、便于工业化生产建造和信息化管理的特点,近年在我国得到大力支持,并且发展迅速。而实现工业化施工是提高预制装配式建筑施工质量和效率的核心,其中通过提高施工现场预制构件吊运安装、调姿就位、构件接缝浇筑、建筑外立面施工等作业的机械化和自动化程度是实现工业施工的关键。但目前装配式建筑构件施工作业主要采用传统起重吊装设备和人工作业,施工效率低,人员安全隐患大。为此政府启动了关于施工现场高效吊装安装关键技术与装备的国家重点研发专项计划,目的是研发适用于工业化建筑施工构件吊装的具备构件自动取放、吊运安全路径自动规划、构件空中自动调姿与寻位安装、构件竖缝浇筑施工等关键技术与装备。而研发适用于预制构件自动取放、调姿就位专用吊具是实现构件高效吊装的关键技术之一。
本文通过分析预制混凝装配式建筑预制构件的特点及其吊装作业要求,采用集成创新的方法,确定了一种用于混凝土预制构件吊装作业的具有构件自动取放、空中调姿功能的专用吊具的设计方案,并对所设计方案按功能进行分解,对关键零部件细化设计,建立零部件三维模型并进行整体装配。对关键结构:剪叉式空间机械臂结构作运动学、稳定性分析及仿真验证。主要的研究过程和结论如下:
(1)需求分析和总体方案设计:在调查研究和分析国内外预制混凝土装配式建筑发展现状和趋势基础上,结合构件吊装作业施工特点,总结混凝土预制构件吊装施工技术和设备研究和应用情况、存在和需要解决的问题。确定构件自动取放和调姿作业功能要求,根据功能要求,通过不同方案优劣对比,建立吊具总体设计方案;(2)分步方案设计:根据构件吊装吊具的总体设计方案,确定采用电动推杆驱动吊钩实现吊钩对吊点的自动脱挂钩;采用基于绳驱的剪叉式折叠机械臂实现吊钩自由度控制和构件起重升降;采用丝杠模组机构实现吊钩间距对构件吊点间距的适应性调整;采用回转支撑机构实现对构件吊装过程的水平姿态调整。
(3)关键零部件细化设计:根据总体设计方案,分别对自动脱挂钩结构、剪叉式折叠升降结构、吊钩与吊点间距适应性调整机构、预制构件水平姿态调节回转机构及其相关的关键零部件结构进行设计和分析,并采用 solidworks 对零部件进行三维建模并完成虚拟装配。
(4)剪叉式起升机械臂机构运动分析和结构静力学分析:对自动取放吊具关键部件—剪式折叠机械臂进行运动学分析;采力法和矩阵位移法对剪叉式吊臂工作状态受风载影响的最大变形进行理论分析、并通过 ansys workbench 对其进行仿真验证。确定剪叉式吊臂结构在风载的干扰下其执行末端形变位移量满足自动取放吊钩对构件的脱挂钩条件。
关 键 词:钢筋混凝土预制构件;自动取放;剪式机构;结构设计
Abstract
Prefabricated concrete structure have received strong support in recent years because of their characteristics of meeting the requirements of green buildings, facilitating industrialized construction and information management, and develop rapidly. The realization of industrial construction is the core of improving the construction quality and efficiency for prefabricated buildings. Among them, by increasing the degree of mechanization and automation of prefabricated component operations at the construction site,such as handling and installation of prefabricated components, posture adjustment and seating of prefabricated components, joint casting between components, external wall surface treatment, etc, which is the key to achieved industrial construction. However, at present, during the construction of prefabricated buildings, lifting and installation of prefabricated components mainly adopts traditional lifting equipment and artificial auxiliary operations.The construction efficiency is low and the hidden danger of personnel safety is large.To this end, the government launched a National Key R&D Plan for key technologies and equipment for efficient hoisting and installation at the construction site.The aim is to develop key technologies and equipment for automatic picking and placing of prefabricated components, automatic planning of safety paths for prefabricated components lifting, automatic adjustment of prefabricated components attitudes and seek installation, and construction of gaps between prefabricated components,for lifting and installation of prefabricated components in industrial building construction,the research and development of a special spreader suitable for picking and placing the prefabricated components automatically, and attitude adjustment automatically is one of the key technologies for the efficient hoisting of prefabricated components.
In this paper, by analyzing the characteristics of precast concrete of prefabricated construction, and the requirements of lifting and installation of the precast concretes,a mechanical structural scheme was designed for the automatic pick and place the precast concretes and adjust the gesture of the precast concretes during the process of hoisting and installing of the precast concretes with the integrated and innovative approach.And have decomposed the designed program according to the function,refined design to the key components ,modeled the three-dimensional of the parts and establish a three-dimensional model of the whole structure on this basis,.have analyzed the kinematics, structural stability and simulation verification of the spreader scissor type space manipulator structure,which is the key structure of the overall structure . The main research process and conclusions are as follows:
(1) Demand analysis and overall program design: Based on investigation and analysis of the status quo and trends of prefabricated concrete prefabricated buildings at home and abroad, combined with the characteristics of component hoisting operations, summarizing the research and application of prefabricated concrete hoisting technology and equipment, and the existence of And the problems that need to be solved. Determine the functional requirements of automatic pick and place and position adjustment operations for components, and establish the overall design of the spreader by comparing the advantages and disadvantages of different programs according to functional requirements;
(2) Step-by-step design: According to the overall design of the lifting slings of the components, it is determined that the electric hooks are used to drive the hooks to realize the automatic hooking off of the hanging points; the scissor-type folding robot arm based on the rope drive is used to realize the lifting. The hook degree of freedom control and the lifting and lowering of the components; the use of the screw screw module mechanism to achieve the adaptive adjustment of the hook spacing of the hanging point of the component; the use of the rotary support mechanism to achieve the horizontal attitude adjustment of the component lifting process.
(3) Detailed design of key components: According to the overall design scheme, the automatic decoupling structure, the scissor-type folding lifting structure, the adaptability adjusting mechanism of the hook and the hanging point, the horizontal attitude adjusting slewing mechanism of the prefabricated component and the related key zero The component structure is designed and analyzed, and solidworks is used to model the component in three dimensions and complete the virtual assembly.
(4) Motion analysis and structural statics analysis of scissor lifting robot mechanism: analysis kinematics of scissor folding robot arm of the automatic pick and place spreader key components.analysis the maximum deformation of the shear fork-type structure under the influence of wind load by the principle of displacement superposition and matrix displacement principle, and verified by ANSYS workbench.The scissor-type mechanical arm structure was obtained and the deformation displacement of the end was performed. Under the disturbance of the wind load, it was verified that the automatic pick-and-place hook meets the hook condition of the prefabricated component.
Keywords: Reinforced concrete prefabricated components; Automatic pick and place; Scissor mechanism; Mechanical analysis.
装配式建筑作为工业化建筑的主要建筑形式,即通过将预先设计、制做好的建筑材料或部件在建造施工现场进行拼装和固定而形成的建筑结构。若以不同建筑建造材料和建造技术作为分类的基础,可以将装配式建筑系统定义为以木材、钢结构、现浇混凝土、预制混凝土或者由此类建筑材料组合使用而形成的空间封闭结构[1]。
现代装配式建筑主要是以钢结构、预制混凝土部件作为主要的建筑材料的建筑类型,其中以钢筋混凝土预制构件作为建筑构造基础的装配式建筑,其特点是将组成建筑建体的大量建筑构件如各类墙板、楼梯、梁柱,以及叠合板、阳台、飘窗等部件,根据建筑结构预先设计,并通过工厂进行标准化生产,然后把已成型的各类建筑预制构件运输至建造施工现场,采用机械设备及专业人员进行吊装作业。相比现浇建筑体系的施工作业,其工序和工作量都可以通过更加规范的流程化手段大幅度的减少,同时可有效的减少建筑建造成本[2-3],较好的控制施工质量,随着新兴建筑建造技术的发展,如 BIM 技术,装配式建筑的模块化建造理念与 BIM 技术等新兴建筑建造技术相结合[4],形成装配式建筑信息技术应用平台,对建筑的全生命周期进行整合[5],且在前期的建筑整体结构设计和预制构件设计时,还可同步考虑装修一体化设计,进一步提高建筑建造效率,使得建筑施工的生产效率大幅度提高。
装配式因其符合工业化建筑的特点,较早的在德国、日本、美国、法国、加拿大、新加坡等国外工业化较高的国家发展起来[6-9],并且在政策和技术的不断推动下,其发展和完善过程表现为从标准化和工业化发展到多元化和集成化,最终到现在的信息化的过度[11]。
不仅解决了建筑建造所需混凝土预制构件生产的标准化、工厂化和建筑结构多样化之间的矛盾[12],同时兼顾了生产效率、集成装修以及装配式结构减震、隔震等问题,因此在这些工业化程度高、经济发展较好的国家和地区,都根据自身不同的自然和人文条件,对装配式建筑的发展采用了不同的方法和道路,并取得了很大的成就,并且整体过程表现为:从湿法浇筑体系到采用现浇和预制装配相结合,再到尽可能干法装配体系的方向发展;从资源浪费型向绿色产业化方向发展,从注重建筑结构的预制和施工机械化向整体过程的系统化、集约化以及信息化管理的方向发展[13]。
在我国,预制混凝土装配式建筑相对德国、日本、美国、法国、加拿大等工业化程度较高的国家虽然起步较晚,但近几年装配式建筑因其建造效率高、符合绿色、工业化建筑要求的特点,在国家经济实力不断提高、建筑业的快速发展以及发展模式急需转型的前提下,得到广泛关注和快速推广。为此国家出台了相应的政策法规,以优化建筑产业结构,加强技术研究,推进建筑的节能减排,达到可持续发展为目的,要求尽快推进和实现建筑及构件设计、生产的标准化和工厂化,推进施工过程机械化和自动化等[14],目的是通过技术改造和创新,提高装配式建筑建造水平和其在总体建筑体量中的占有率,以逐步实现建筑工业化和现代化。所以当前我国建筑业处于由以混凝土浇筑建筑体系为主的传统建筑向以装配建筑为主的工业化建筑体系转型时期,由于两者建造方式存在差异性,导致与装配式建筑相关的设计、施工等过程在技术和经验上积累,以及相关专业人员素质和数量需求上出现断带的现象,尤其是在装配式建筑的预制构件吊装施工过程中存在一些列问题,此因素也是成为制约当前预制混凝土装配式建筑在我国推广的关键原因之一。
建筑设计与施工一体化是实现装配式建筑工业化建造的关键,由于传统浇筑结构一般经由设计单位设计,转施工单位按照设计方案进行施工,虽然装配式建筑遵从同样的建造流程,但是装配式建筑相对于传统浇筑结构起步晚,尤其在我国目前能将设计和施工一体化综合考虑的机构有限,另外因为专业施工人员和设备欠缺等原因,使得施工过程中存在施工组织方式和施工设备等无法满足设计标准及效率要求,或者设计方案未考虑到施工的可操作性,根据陈伟等人的研究表明[15]
,目前在钢筋混凝土预制构件吊装操作及相关作业过程中,专业人员技能素养和构件吊装水平是影响装配式建筑施工安全和施工质量、能效的关键因素,而构件吊装水平很大程度上由预制构件吊装设备的适用性和吊装操作水平所决定。
由于在土地资源紧张的条件下,目前很多城市建筑以高层建筑为主,且钢筋混凝土预制剪力墙装配式建筑是其主要的发展方向之一,该结构形式在建造施工时对施工装备,尤其是起重装备的就位性能要求发生了本质的变化,从现有少量的钢筋混凝土预制装配建筑的示范性建造中,已经充分的暴露了现有建筑施工起重装备的不适应,此现象已经成为阻碍混凝土装配式建筑技术及其发展的主要原因之一,主要体现在:建筑构件在吊运行程中构件姿态不可控,造成构件撞损严重、后期修补工作量大且建筑总体质量不易保证;因设备自身的晃动及微动控制性能不足,造成构件精确就位困难、作业效率低;构件方位角、水平度、标高及垂直度调整困难、用工量大、作业劳动强度大、安全保障差;竖向构件临时支护作业效率低、可靠性差;竖向构件需人员攀爬到高空摘挂钩,困难且危险;外挂架属零时工具,因安全事故率高已在多地禁止使用等。
针对装配式建筑构件吊装施工中存在的问题,在装配式建筑的工业化施工或机械化施工发展较早的欧、美、日等发达国家,由于建筑工业化起步早,其相关技术研究及应用也较为先进,且注重对施工专业人员素养培训,从业人员数量也已经基本满足其施工要求,并且其用于预制构件吊装施工的机械设备自动化程度较高,在关键技术方面的研究也处于较领先水平。而且随着目前现代化建设项目规模不断扩大、复杂程度的增加,在国外装配式建筑发展较成熟的国家,一些机构开始将许多新技术,如以计算机和机器人为代表的自动化技术以及新材料技术等也不断被引入到工业化建筑吊装施工相关领域。日本作为装配式建筑建造技术最发达国家,还针对楼层较高的装配式建筑研发了自动化建造体系,使得其高层装配式建筑吊装施工自动化技术及应用的研发也处于领先地位,例如日本株式会社大林组研发的 “BIG-CANOPY”是集自动化与现代计算机技术管理系统于一体的,针对预制钢筋混凝土结构高层建筑的自动化施工体系,大幅度提高了高层预制钢筋混凝土建筑的建造效率,逐步实现了施工过程的标准化、信息化,提高工程质量,缩短工期,改善工作环境,节约开支等,该技术成功应用于日野村不动产公司的高层公寓建筑建设,以及日本其它地区高层住宅建设和新加坡等地的高层预制钢筋混凝土建筑建设中。类似的还有日本 Obayashi 研发的大楼全自动施工系统“ABCS” 等。此外如欧美和新加坡等国家已经开始了对工业化建筑施工机器人的研究[15],其中就包括用于预制混凝土构件吊运安装施工用的机器人或机械臂。
筑施工相关技术的研发和应用也是紧紧围绕此类建筑体系的施工需求开展,通过上世纪八十年代的技术引进、消化吸收以及追踪研究,在国内建筑业高速发展的推动下,我国在建筑起重设备的研究和应用上,如各类型塔式起重机、移动式起重机等,已经基本满足了现浇钢筋混凝土结构等传统建筑类型的施工中对相关建造物料的起重吊运作业,技术水平也比较先进。随着国内装配式建筑的兴起,有部分机构已经开始了关于建筑构件或建筑材料吊装施工有关研究和应用。
混凝土预制构件吊装作业自动取放、空中调姿设计方案:
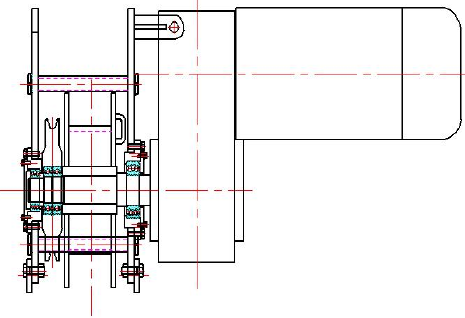
卷扬机构结构二维图
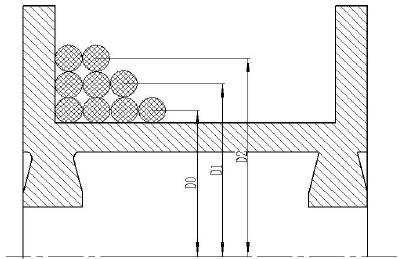
绕绳量计算简图
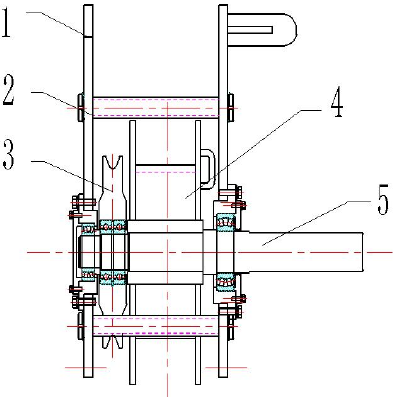
卷筒二维装配图
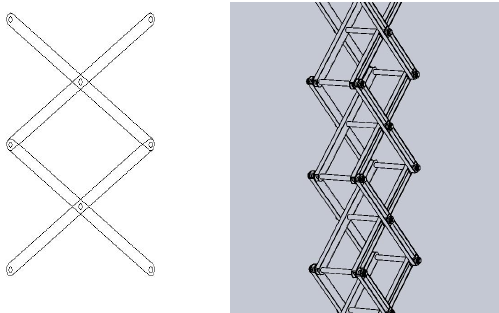
剪式折叠结构
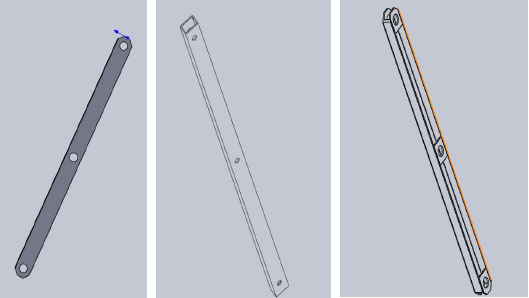
剪叉杆结构
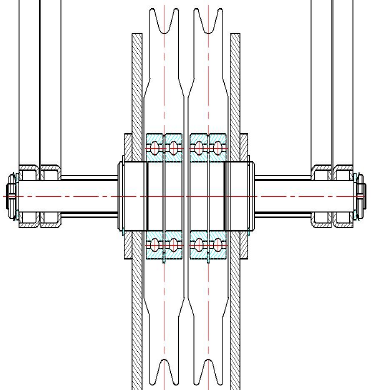
动滑轮装配二维剖面图
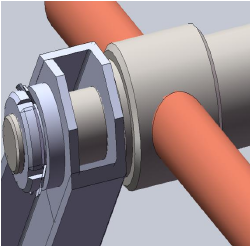
滑轴连接
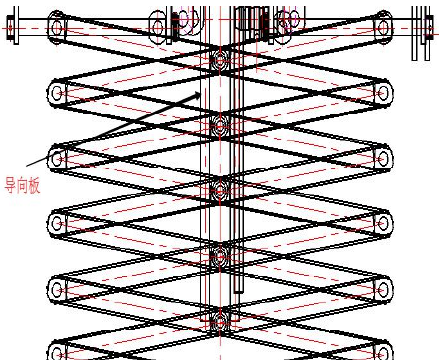
导向板
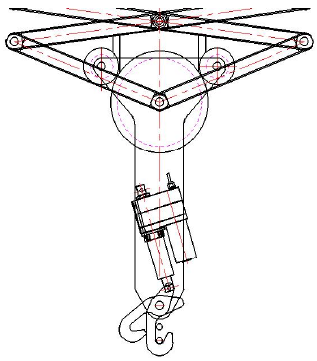
自动取放吊钩机构
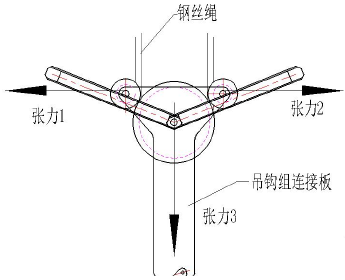
吊钩组连接板
目 录
1 绪 论
1.1 研究背景
1.1.1 装配式建筑及其特点
1.1.2 装配式建筑的发展现状
1.2 预制构件吊装施工存在问题和对策
1.2.1 预制构件吊装施工存在问题
1.2.2 预制构件吊装施工问题的对策
1.3 物料自动取放技术研究现状
1.4 装配式建筑构件自动取放装置研究现状
1.5 主要研究内容
1.6 研究方法
1.7 技术路线
2 吊具整体设计方案
2.1 设计要求
2.1.1 功能要求
2.1.2 性能指标
2.1.3 其他要求
2.2 总体设计方案
2.2.1 吊装对象及吊装方案分析
2.2.2 自动摘挂钩方案设计
2.2.2 基于绳驱动的剪式升降起重臂方案设计
2.2.3 起升机械臂间距调整装置
2.2.4 构件水平姿态调整回转支撑机构
2.3 构件自动取放吊具整体工作过程
2.4 本章小结
3 绳驱剪式机械臂关键零部件设计
3.1 卷扬机构的设计
3.2 空间剪叉式折叠机构关键零部件设计
3.2.1 剪式折叠结构的设计
3.2.2 剪叉运动导向板设计
3.3 构件自动取放吊钩机构设计
3.1.1 吊钩设计
3.1.2 吊钩组连接板设计
4 剪式升降机构的运动和静力学分析
4.1 剪叉式升降机械臂机构运动分析
4.2 剪式机械臂受力分析与仿真
4.2.1 空间剪式机械臂风载分析
4.2.2 空间剪叉式机械臂主迎风面应力应变分析方法
4.2.2 空间剪叉式机械臂次迎风面应力应变分析方法
4.3 剪叉式机械臂风载仿真分析
4.4 本章小结
5 结论与展望
5.1 结论
5.2 创新点
5.3 展望
参考文献
附 录
致 谢
(如您需要查看本篇毕业设计全文,请您联系客服索取)