24Сʱ���Ķ�������
24Сʱ���Ķ�������
ժҪ
�����ڻ�����ơ��ۺ��Լ�����������Ӧ���У������ɶ��Ե�ʶ���ܰ��������ھ�ȷ����������ƽ�����˶���Ҳ�ܰ������е��Ʒ��Ƶ�Ч�ʺ;����ԡ�
�������ij������һ�����ϵͳ�����۷�����������һϵ�и���ƽ������˻������пɶ����˶������о�������Ƽ��������ʶ���������Զ�ʶ�����ֵ���ƽ�������˻������˶���������Ҫ�о��������£�
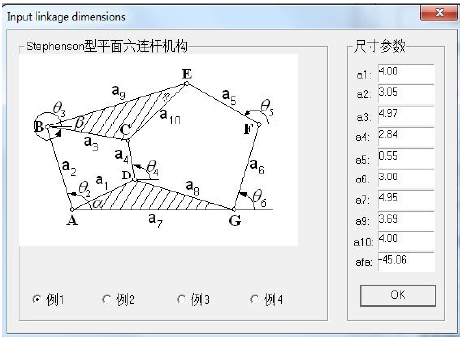
������1��Stephenson �͵����ɶ�ƽ�������˻�����֧ʶ���о���Stephenson�͵����ɶ�ƽ�������˻������ĸ�����������������˶�ģ�ͣ��ж��ĸ������������֮�䡢������������Լ��������͡�����ؽ���ת�ռ䣨JRS���ĸ��������������˶���Χ���з�������������������״̬�������������з�֧������㣬������ Sylvester ��ʽ��Ԫ���õ� Stephenson ��ƽ�������˻�����ͬ�������֮��Ĺ�ϵ��
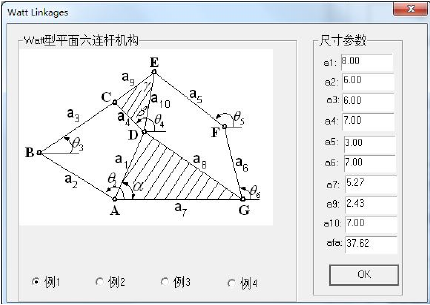
������2��Watt �͵����ɶ�ƽ�������˻�����ȫ��ת���о����� Watt �͵����ɶ�ƽ�������˻������ĸ�������������������·����Ϲ�ϵ�������ӷ�֧�ĸ���õ� Watt �ͻ�������ȫ��ת���ԣ������ʵ���� Watt�ͻ����ķ�֧������㡢�˶�ȱ�ݼ��˶�˳����з�����
������3�����ƶ���ƽ�����˻����ɶ���ʶ���о������ƶ������õ����ƶ���ƽ�������˻�����������������������ϴ��ƶ����ĸ����������������ù�ϵ���õ����ƶ���ƽ�������˻����ļ���λ�õ㼰����幹�ͣ��Լ���ͬ�ؽڼ�����������ϵ�����ܽ�������ķ�֧���ӷ�֧ʶ����
������4�������ɶ�ƽ�����˻�����֧ʶ���о���������ɶȶ·����ƽ�����˻��������������ɶ�ƽ�������˻����������ɶ�ƽ������˻�����ͨ���������ֻ�������·�����״̬���õ����ֻ����ļ���λ�ò���һ���о����ֻ����ķ�֧����ɶ����˶����ԡ�
������5��ƽ�浥���ɶ������˻����Զ�ʶ�����������ڶ�ƽ�������˻����˶����Ե����۷�����ͨ�� MFC ��������棬��Ƽ��������ʶ����������һ�������µ� Stephenson �ͺ� Watt ��ƽ�������˻���������������ߡ���֧����֧�㼰������ڵ��λ���Զ�ʶ�𣬲������������������ʶ���������۽�����бȽϣ������ʾ�����������ã�����һ����Ч�ԡ�
�����������������о�����һ�ֿɶ�����ʶ������һϵ�жƽ�����˻��������о����õ������������ԡ��˶�ȱ�ݺ��˶���Χ������Ƽ�������������������ƽ�������˻����ķ�֧�����Զ�ʶ��
�����ؼ��ʣ����˻����������֧���ؽ���ת�ռ䣬�ɶ��ԣ��Զ�ʶ��
Abstract
����In the design and synthesis of linkages and the application of parallel robots, the mobility identification of linkages can not only help the linkages move smoothly between precise points, but also can help to improve the efficiency and economy of the design of mechanical products. This paper tries to put forward a theoretical analysis method to study the mobility of planar multi-loop linkages. And a computer aided software is designed to identify the kinematic characteristics of two planar six-bar linkages. The main contents of the research are as follows:
����(1) Branches identification research for Stephenson planar six-bar linkage with single degree of freedom The kinematic models of the four-loop chain and the external five-loop chain of the Stephenson planar six-bar linkage with single degree of freedom are established. The relationship among the input and output curves of the four-loop chain, the type of the linkages and the number of dead points are analyzed. Introducing the concept of joint rotation space, the kinematic ranges of the external five-loop chain is analyzed. And relationship between different inputs and outputs of the Stephenson six-bar linkage is obtained by combining the coupling state of the two loops and the Sylvester elimination method.
����(2) Full rotatability research for Watt planar six-bar linkage with single degree of freedom In this paper, the coupling relationship between the four-loop chain and the external six-loop chain of the Watt planar six-bar linkage with single degree of freedom is analyzed. And the complete rotation characteristics of the Watt linkage are obtained. Introducing the concept of sub-branch.Given an example, and the motion ranges , the motion defects and motion sequences of Watt linkage were analyzed.
����(3) Mobility research for planar linkages with sliding pairs Introducing sliding pairs, the existence condition of the crank of the planar five-bar linkage with sliding pairs is obtained. Combined with the interaction between four-bar linkages and five-bar linkages with sliding pairs, the specific configurations of the limited positions of planar six-bar linkages with sliding pairs are obtained, including dead points, branch points. And input-output relation and the joint rotation space are discussed. And the identification method of branches and sub-branches of six-bar linkages with two or three sliding pairs are summarized.
����(4) Branches identification research for planar linkage with multi degree of freedom Introduce complex planar linkages with multi degree of freedom, including planar seven-bar linkage with two degree of freedom and planar eight-bar linkage with three degree of freedom. Through the analysis of the coupling state of two loop, the limit positions of two kinds of linkages and other motion characteristics of the two linkages can be obtained.
����(5) Auto branches identification software for planar six-bar linkages Based on the theoretical analysis of the kinematic characteristics of planar six-bar linkages, a two-level interface is built by MFC. And a computer aided identification software is designed to identify the mouse point position of two typical planar six-bar linkages. The the relationships between the input and output of the two six-bar linkages with certain connecting link parameters are obtained automatically. And the branch points which hinder the smooth motion of the two six-bar linkages are identified.
����To sum up, a relative systematic theoretical analysis method is established in this paper. A series of kinematic characteristics of multi-loop planar linkages are researched.
����And the singularity, motion defects and motion ranges of the linkages are obtained. And a computer aided design software is designed to identify the branches of planar six-bar linkage automatically.
����Keywords: linkages, multi-loop, branches, joint rotation space, automatic identification
�������Ӷ����˻����Ŀɶ��������ǻ����ۺϺ����������������ѵ�����֮һ���ɶ�����ָ�����˶��������ԣ���֧��װ�䷽ʽ���·����ƽ���ԣ��ӷ�֧��������Ĺ��οռ䣩����ȫ��ת�ԡ��˶�ȱ�ݺ��˶�˳�����У���ȫ��ת����ָ�������������ת����ƽ������������ָ֧����һ�����˻����Ĺ��Ϳռ䣬��������ÿռ������˻�����ʵ�������ı任����֧�������˶�����һ���������ʣ��������̶��������ء�һ����˵�����ڸ������˿ɶ������⣬Ӧ������ʶ��;�����֧���˶�ȱ��ָ����������֧֮�䣬��������ͨ�������˶����ﵽ��λ�á��������˶�ȱ�ݶԻ����������˶��������ģ������ڸ�����������������������˶�ȱ�ݶԻ����������˶��к���Ҫ���о����塣�˶�˳��ָ���ǻ�����һ���������˶��У�������֧֮�����ع�ϵ���ӷ�ָ֧����һ�����˻����������Ĺ��Ϳռ䣬���ӷ�֧�ڣ���������������ƽ�����˶��Ҳ������κ�����㡣
����ʶ������ջ������˶����ԡ��˶�������װ�䷽ʽ�ǻ����������������������⡣��ˣ��ڻ�����ơ��ۺ��Լ�����������Ӧ���У����뱣֤�����ڸ���ȷ��֮���˶��������Ժ�ƽ���ԣ�������Ч���������ƺ��ۺ��е���ɶ��������ȱ�����⡣
�����������о�����Դ����T201505����ʡ��������Ŀ“���������˼����Ƚ�����װ���ؼ������о�”����������о��������ڣ�
����(1)����ƽ�����˻����ɶ����˶�������ʶ�������ۣ�Ϊ������е�ṹ������˵���ƺʹ����ṩϵͳ�����۷�����
����(2)�����������Ӧ���� Stephenson �ͺ� Watt ��ƽ�浥���ɶ������˻������˶��ۺ��У����ٵõ�������֧����֧����˶�ȱ�ݵĽ⼯���Ӷ��������������ڣ�����������������Ŀ�о��ɹ��Էḻ�����ƻ����˶��ۺ����ۣ���ָ�������ܻ����ͻ�����Ƽ�����Ӧ�þ��л������塣
����ƽ�����˻����ڹ�ҵ�Ͼ��й㷺��Ӧ�ã�������������������ֱ�ʵ�־��ܸ��ӵ��˶����ھ��¡�������������Ϊģ������Խ���ʹ�ã����⣬���ӵĶ���˻���������������ҽ�ƿ����������ڶ�ƽ�����˻����ɶ��Ե��ж��С����𡢹�����[1-3]�����ý᷽����Ԫ�������а���滻���õ� Stephenson��ƽ�������˻��������㣬�������ݻ�����·���ص�� Stephenson ��ƽ�������˻����������������������жϡ����ƽ[4]��֤���� POC ��������Ч�������ϲ����������˶�ѧ������ѧ�������ѽ���[5-9]���������ۺ����ۣ�ͨ�������ߵ�ӳ���ص��������ƽ�����˻������˶�ȱ�ݺ���Ч���˶���Χ�����ޡ�������[10-11]��������������ѧ���������������˻�����Լ�����̣��������������˻����ֳ����������˻�����һ����������飬�õ����������˻����������������������������������˻���������������������͢��[12]�ȶԻ����ۺϵļ�����Ҫ���������˱Ƚ��о����õ����ڷ�λ�����Ļ����ۺ��о������ɵõ��������ڵļ���������һ���ԣ����ṹѧ�������̶Ի������о�������ȷ�����ڲ�������ά[13]�ȶԶ����ɶ����Խ��������˻��������˷����������鹦ԭ���Ի���������α����ģ�ͣ��������з��棬�õ����ת�Ǽ����ѧ��ϵ����������ֵ������ֵ���жԱȣ�֤���˸����۵���ȷ�ԡ��νܡ�÷��[14-16]��������˵ĸ���� PRR-RRP �������˻�����Ч�������˻������Ƶ��������˻����˼��ڲ�ͬ�����µ�����������������ΰ[17]��������Ч 4R ��·�������������۷����˲����������˳��Ի�������λ�õ�Ӱ�졣���Ρ�������[18]����������ԭ���ϣ��� 2T1R �������������ɶȺ��˶���������˷����������� 2T1R ���������ļ�������λ�Σ��������������ʱ��λ������������ܡ������ѵ�[19]������һ�ֿռ� 5-CS �������������������ۡ�ţ�ٵ������ȶ������۷����Ը��ֻ������˶�ȱ�ݸ������жϡ������졢������[20]�ڿ������´����е��˶�ѧӳ�����۵Ļ����ϣ������ƽ�����������˶��ۺϷ������÷�����������������������Χ���õ�����Ľ��ƽ⣬ʹ�����ﵽ�������˶�λ�ˡ�������[21]�Ȼ��ڼ������� Watt �������˻�����Ϊ�����˻����Ͷ��˻������� Watt �������˻������з�����Ż�����������������[22]��ƽ���������������߾ֲ�����Ӧ��Ϸ��������� Stephenson �������˻��������ۺϵ���ѧģ�ͣ���֤�˻������ȵ��Ż���⡣�����ܡ�������[23]���� Matlab �н�����ƽ�����˻����� Simulink ����ģ�ͣ��Ի����ٶȺͼ��ٶȽ��з������������[24]�Ƚ��ŷ�������̡�������ǻ�Ԫ��������б� Sylvester ��Ԫ�����õ����������ͬʱ������������ͬʱ���������������µ����������ϵ���ߡ�����[25]������ CAD ��������ƽ��������м���Լ���ͳߴ�Լ���ȣ�����ƽ��ģ������������ݻ������ص��ʵ�ʹ����غɣ��Ի����Ķ���ѧ���з�����
����������[26]�����о���ƽ������˶����ļ�϶��������λ��ԭ���ͽ�����ѧģ�ͣ��õ��˻���ĩ�������﷽�̡�ţѩ÷���߹��ٵ�[27]�����һ�������ɶ��������ಢ���������û������� 2 ��ת�����ɶȺ� 1 ��ƽ�����ɶȣ�ͨ��������������������������Ӱ�죬�õ��˸û����ļ��������ƽ��[28]���ڻ������������ԣ������� 39 �в�ͬ�ṹ���͵� 6-SPS ����������λ�������ȫ��ʵ���⣬�Ҹ÷�������һ���ԡ����i[29]�Ƚ���ƽ�� 2 ���ɶȹ�Լ�������������ص�ƽ�ⷽ���Լ�λ�����֮��IJ��䷽�̣��Ի��������˶���ѧ��ģ����������⡣������[30]�������ɶȲ��������˽����˶���ѧģ�ͣ��Ի������˶�ѧ�����˷��⣬������ Matlab������ Adams ���������ģ�⣬��֤�˶���ѧģ�͵���ȷ�ԡ�������[31-32]���˽��� 4-SPS/CU ����������ģ�ͣ����Ըû����Ķ���ѧ�����˷������������˹ؽ�Ħ�������䶯��ѧ���Ե�Ӱ�졣�����[33]��ͨ���ռ���������ɶȼ��㷽�����õ����������ƶ��������������ƶ��������������ƶ���ƽ����������ɶȽ����˼��㣬�������ü��㷽����ʹ�������ȡ��ް���[34]�����������������Դ����ɵ�˫���������������ѧģ�ͣ����Ի����������ƶ�����϶���з�������ϸ��������������õ������Ķ���ѧ�����Լ���϶�Ի����˶����ȵ�Ӱ�졣�չ[35]�ȶ�ƽ�������˻�����ת�����ļ�϶���з��������� Matlab ���з���������õ���϶�Ի���λ�þ��ȵ�Ӱ�죬�������Ŵ��㷨�����ڻ����˳�����ʹ�����С��
����·����[36]���˻��� Matlab �е� SimMechanics �� Simulink ���߶�һ���˻����������˽����˶���ѧ���棬��������������ģ���̺�Լ��ģ�����µ����ܡ��ں�Ӣ[37]�ȷ�����ƽ�������˻����Ķ���ѧ���˶�ѧ���ܣ��õ��������˶�ѧ�������⣬�������� Kane ����ѧ�����˻����Ķ���ѧ���ܡ��¸���[38]����ţ��ŷ�����̣������һ��ռ䲢��������ͨ�ý�ģ�ͷ��淽�������� 6-UPS �Ϳռ䲢������Ϊ������ģ�ͣ���֤�˸÷�������Ч�ԡ������ĺ��۾�[39]�����˶����ɶ�ƽ�������˻������˶�ѧ��ͨ���ı�˳����������õ������������ϵ�����������[40]�ȸ��������ɶȲ����������˶����Եõ��������������ϵ�����������Ķ���ѧģ�ͣ������� 3 �ֲ�ͬ�ľ�̬Ħ��ģ�ͣ��õ�Ħ���Ի����������Լ��˶���Լ��������Ӱ�졣
����ƽ�������˻���ԭ����ƣ�
ƽ��˫�������˻����������湦��
ƽ��˫�������˻����Ĵμ����湦��
Watt��ƽ�������˻��������ͼ��
������ĵ�ʶ����
������
Stephenson��ƽ�������˻��������������
Watt��ƽ�������˻��������������
ѡ��������ʾ����
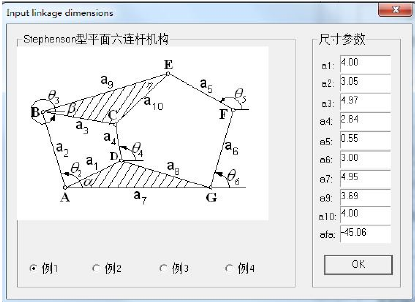
Stephenson�ͻ���ʵ���ߴ�������з�֧�㣩
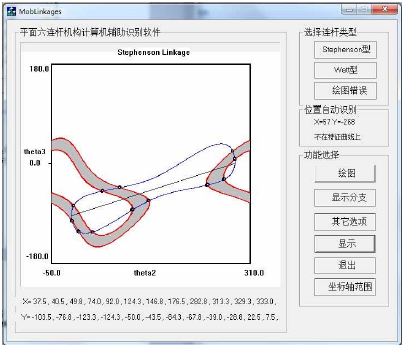
Stephenson�ͻ������������ʶ��ʵ�����з�֧�㣩
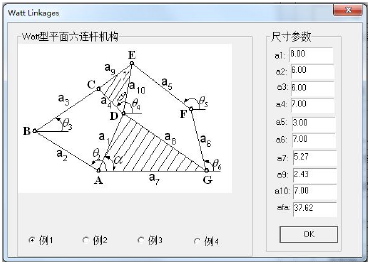
Watt�ͻ���ʵ���ߴ�������з�֧�㣩
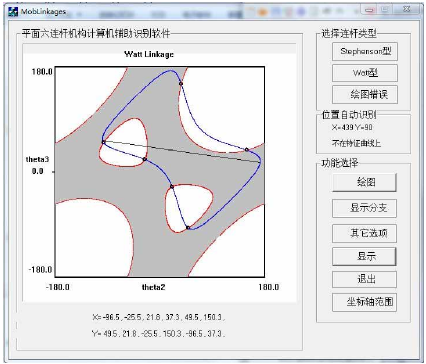
Watt�ͻ������������ʶ��ʵ�����з�֧�㣩
Ŀ ¼
����ժ Ҫ
����Abstract
����Ŀ ¼
������ 1 �� �� ��
��������1.1 �����о���Ŀ�ļ�����
��������1.2 ƽ�����˻������о��ſ�
������������1.2.1 �������о���״
������������1.2.2 ƽ�����˻����ķ������ۺ��о�
��������1.3 ������Ҫ�о�������ȫ�Ľṹ
������ 2 �� Stephenson ��ƽ�������˻�����֧ʶ��
��������2.1 ����
��������2.2 ƽ���ĸ����������б�
��������2.3 Stephenson ��ƽ�������˻����ķ�֧���ʶ��
��������2.4 ���� Sylvester ��Ԫ�������������ϵʶ��
��������2.5 ʵ����֤
��������2.6 ������
������ 3 �� Watt ��ƽ�������˻�����ȫ��ת�Է���
��������3.1 ����
��������3.2 Watt �������˻����ķ�֧ʶ��
������������3.2.1 Watt �������˻�����·�ж�
������������3.2.2 ���������ͬ���ĸ����� Watt ��ƽ�������˻�����֧ʶ��
��������3.3 Watt ��ƽ�������˻����������ӷ�֧
��������3.4 ʵ����֤
��������3.5 ������
������ 4 �� ���ƶ���ƽ���˻����Ŀɶ���ʶ��
��������4.1 ����
��������4.2 ���ƶ���ƽ�������˻����ķ�֧ʶ��������������
������������4.2.1 ���ƶ���ƽ�������˻����Ĺؽ���ת�ռ�
������������4.2.2 ���ƶ���ƽ�������˻���������������������֧ʶ��
��������4.3 ���ƶ���ƽ�������˻����ķ�֧ʶ��
������������4.3.1 ���ƶ����ĸ�������ʶ��
������������4.3.2 ���ƶ���������Ĺؽ���ת�ռ�
������������4.3.3 ���ƶ���ƽ�������˻�����֧ʶ��
������������4.3.4 ���ƶ��������˻����ſ˱Ⱦ����������
��������4.4 ʵ����֤
������������4.4.1 �������ƶ���ƽ�������˻�����֧�������ж�ʵ��
������������4.4.2 �������ƶ���ƽ�������˻�����֧�������ж�ʵ��
������������4.4.3 �����ſ˱Ⱦ���Ĵ��ƶ��������˻�����֧��������ʵ��
��������4.5 ������
������ 5 �� �����ɶ�ƽ��˫�����˻����ķ�֧ʶ��
��������5.1 ����
��������5.2 �����ɶ�ƽ�������˻����ķ�֧ʶ��
��������5.3 �����ɶ�ƽ������˻����ķ�֧ʶ��
��������5.4 ʵ����֤
��������5.5 ������
������ 6 �� ƽ�浥���ɶ������˻������������ʶ������
��������6.1 ����
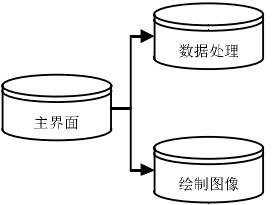
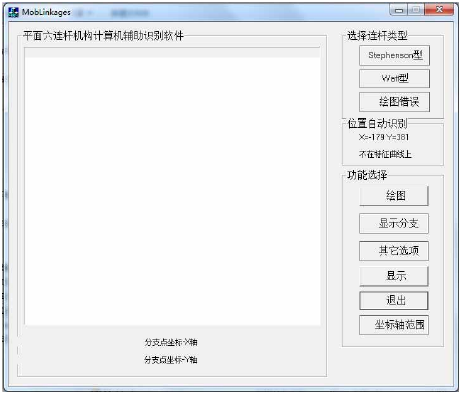
��������6.2 ���������������ܴ
��������6.3 ������ʶ�����
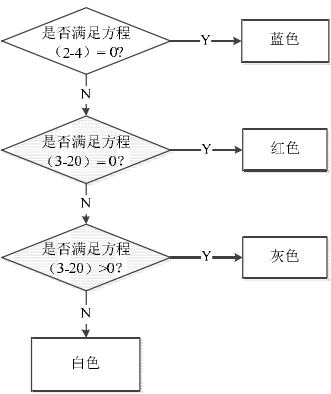
������������6.3.1 ��֧��ʶ�����
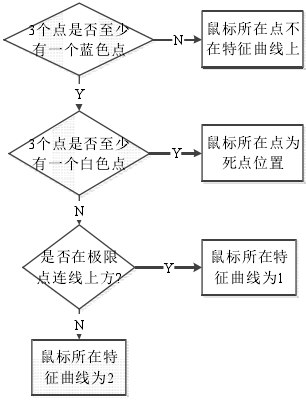
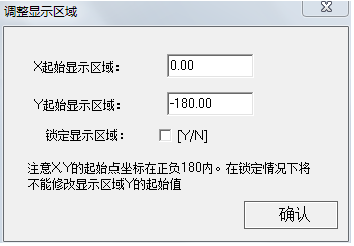
������������6.3.2 ������ڵ��λ���Զ�ʶ��
��������6.4 �����������
������������6.4.1 ������˵��
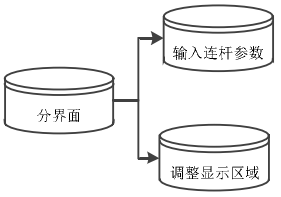
������������6.4.2 ��������˵��
��������6.5 �������������ʶ��ʵ��
������������6.5.1 Stephenson ��ƽ�������˻����������������ʵ��
������������6.5.2 Watt ��ƽ�������˻����������������ʵ��
��������6.6 ������
������ 7 �� �ܽ���չ��
��������7.1 ȫ���ܽ�
��������7.2 ����չ��
���������
������ л
������¼������˶ʿѧλ�ڼ�ijɹ�
��������Ҫ�鿴��ƪ��ҵ���ȫ�ģ�������ϵ�ͷ���ȡ��