24小时论文定制热线
24小时论文定制热线
摘 要
近几年,软体机器人技术迅猛发展,其以软体生物为参考,基于智能软材料研发高自由度的软体机器人.相比传统刚性机器人,这些机器人具有环境适应能力强、控制简单等优势,从而使其在工业、医疗和军事等领域发展潜力巨大.软体驱动器技术是软体机器人的核心技术之一.在众多软体驱动器中,气动软体驱动器柔顺性好、功率质量比高、制造成本低等诸多优点使其成为研究的热点.本文以气动软体驱动器为研究对象,对此类驱动器进行设计与制造,并基于该类驱动器研制三款软体操作手.
气动软体驱动器的非线性运动学响应是其设计的难点,采用有限元方法对纤维增强型和多腔体型两种典型的气动软体弯曲驱动器的驱动性能与结构参数之间的关系进行仿真分析.结合仿真结果,采用 3D模型法制作两类弯曲驱动器.为实现多驱动器协作驱动,设计软体驱动器的控制系统,该控制系统独立控制多驱动器系统中每个驱动器完成弯曲、保持以及伸展动作.将以上气动软体驱动器的研究成果应用于三款软体操作手,即:工业软体抓手、软体仿人手和软体康复手套.软体工业抓手抓取稳定、自适应能力强,配合 UR 机械臂能够实现多种物品抓取.结合数据手套或肌电手环,实现软体仿人手灵巧动作复现.设计具有敞开式结构的软体康复手套,辅助实现手功能障碍患者的主动康复训练.最后,开发可视化界面为软体仿人手展示和软体康复手套使用提供便利.
本文通过对新兴软体机器人技术的研究,对典型气动软体弯曲驱动器的驱动性能与其截面尺寸等参数的关系有了更深入的了解,开发了三款基于气动软体弯曲驱动器软体操作手系统.这些研究成果对软体机器人技术今后的应用及进一步发展具有积极的作用.
关键词:软体机器人、气动软体驱动器、驱动器控制、软体操作手
ABSTRACT
In recent years, soft robotics based on soft smart material hasdeveloped rapidly. Bioinspired by living organism, many robots with highdegree of freedoms have been developed. Compared with traditional rigidrobots, these soft robots can inherently provide adaptable morphology inresponse to environmental changes and produce sophisticated motions withsimple controls, which makes them have great potential value inautomation, medicine and military domains. One of the core techniques ofsoft robotics is the soft actuator technique. Pneumatic actuators are ofparticular interest because they have many advantages, such as highcompliance, high power to weight ratio and easy fabrication with emergingdigital fabrication techniques. This thesis focuses on the design andfabrication of pneumatic actuators. Using these actuators, three types ofsoft manipulators have been developed.
The significant potential of pneumatic soft actuators is currentlylimited by their nonlinear kinematic responses. In this paper, finite elementanalysis was used as a design tool to find the optimal geometric parametersfor two typical pneumatic soft bending actuators which have receivedsignificant research attention recently. Combined with the simulationresults, molding method is used to fabricate actuators. The control systemhas been accomplished for achieving multiple actuators control. Everysingle actuator can realize bending, maintaining and extending with thehelp of the designed control system. Three soft manipulators including softautomate gripper, soft hand and soft rehabilitation glove were developedbased on the research results. The soft automate gripper has a strongadaptive ability. Cooperated with UR robot arm, it can grasp differentABSTRACTkinds of objects. Combined with data glove or EMG band, the soft handcan display dexterous actions similar as the human hand. The open-palmdesigned soft rehabilitation glove can help hand functional disorderedpatients do active training. At last, the visual interface was developed tofacilitate the display of soft hand and the application of soft rehabilitationglove.
According to this research, a better understanding of the relationshipbetween the typical pneumatic soft bending actuators and their structureparameters has been obtained and three soft manipulator systems based onthese bending actuators have been developed. These research results willhave a positive effect on the application and further development of softrobotics in the future.
KEY WORDS: soft robotics, pneumatic soft actuator, control of softactuators,soft manipulator
目 录
摘 要············································································I
ABSTRACT··································································III
第一章 绪论···································································1
1.1 课题来源 ··································································1
1.2 研究背景与意义 ···························································1
1.3 软体驱动器研究现状 ·····················································2
1.3.1 电响应软体驱动器 ·····················································3
1.3.2 磁响应软体驱动器 ·····················································3
1.3.3 化学响应软体驱动器 ··················································4
1.3.4 热响应软体驱动器 ·····················································5
1.3.5 光敏软体驱动器 ························································5
1.3.6 气动软体驱动器 ························································6
1.4 论文内容及章节安排 ····················································7
第二章 气动软体驱动器工作原理 ·········································8
2.1 驱动原理 ···································································8
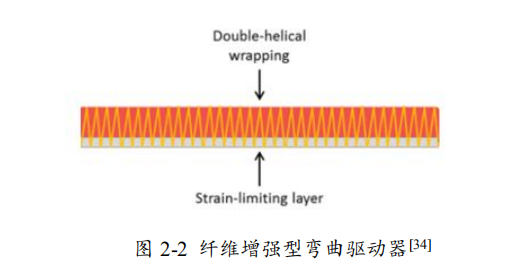
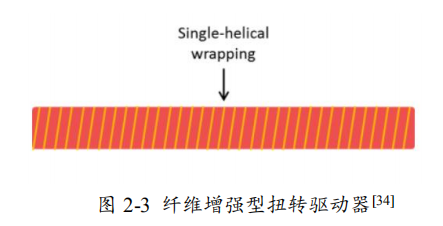
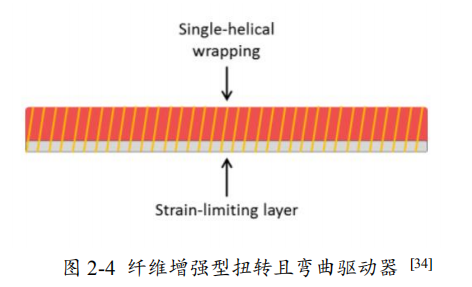
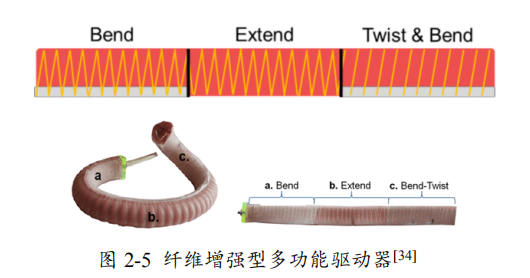
2.1.1 纤维增强型气动软体驱动器 ········································8
2.1.2 多腔体型气动软体驱动器 ···········································11
2.2 理论分析 ··································································11
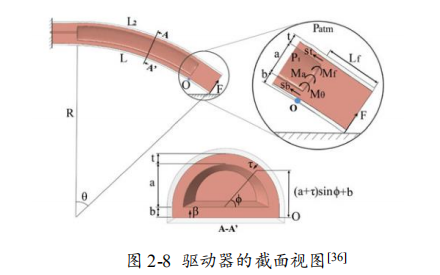
2.2.1 纤维增强型驱动器的理论分析 ····································11
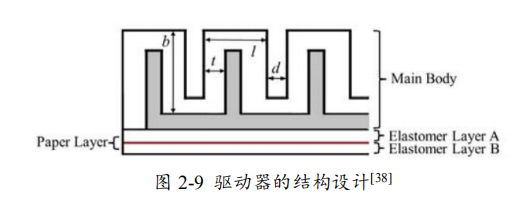
2.2.2 多腔体型驱动器的理论分析 ·······································18
2.3 有限元仿真分析 ························································19
2.3.1 纤维增强型驱动器的有限元分析 ·································19
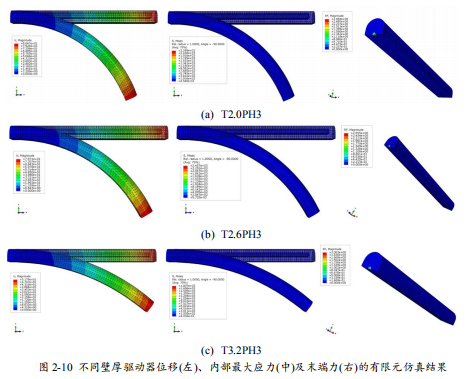
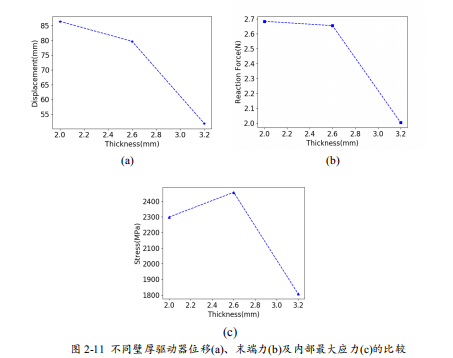
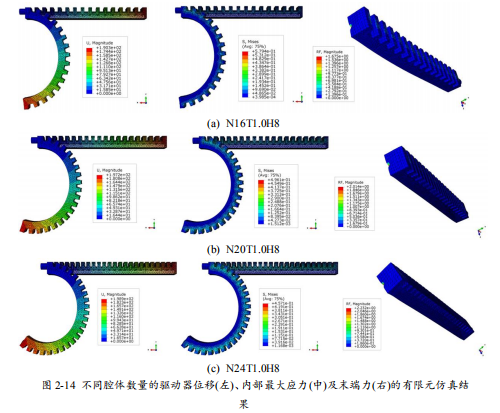
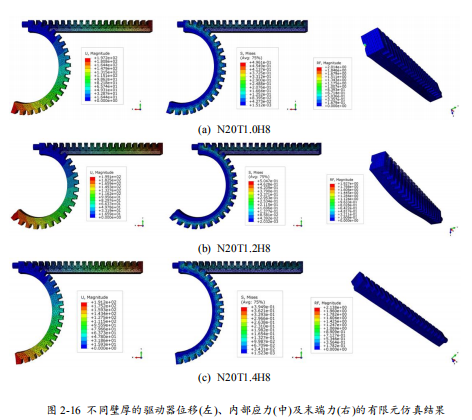
2.3.2 多腔体型驱动器的有限元分析 ····································23
2.4 本章小结 ·································································29
第三章 气动软体驱动器制备 ·············································30
3.1 制作工艺 ································································30
3.2 纤维增强型驱动器 ······················································31
3.2.1 实验材料与仪器 ·····················································32
3.2.2 制作过程······························································32
3.2.3 性能测试······························································34
3.3 多腔体型驱动器························································36
3.3.1 实验材料与仪器······················································36
3.3.2 制作过程······························································36
3.3.3 性能测试······························································38
3.4 本章小结·································································39
第四章 驱动器控制系统设计···············································40
4.1 方案设计··································································40
4.2 硬件系统搭建····························································40
4.2.1 硬件选型·······························································42
4.2.2 系统搭建·······························································44
4.2.3 通讯协议······························································44
4.3 软件系统开发···························································46
4.3.1 自定义指令格式······················································46
4.3.2 控制逻辑·······························································46
4.3.3 人机交互界面·························································48
4.4 本章小结·································································49
第五章 软体操作手集成与应用·········································50
5.1 应用简介·································································50
5.2 软体工业抓手···························································50
5.2.1 抓手的设计···························································50
5.2.2 抓取功能展示·························································53
5.3 软体仿人手······························································54
5.3.1 组成结构·······························································54
5.3.2 计数手势展示··························································56
5.3.3 结合数据手套的展示················································57
5.3.4 结合肌电手环的展示···············································59
5.4 软体康复手套···························································61
5.4.1 手套的组成结构·······················································61
5.4.2 软体康复手套的应用················································62
5.5 本章小结·································································64
第六章 总结与展望 ··························································65
6.1 主要工作与创新点 ······················································65
6.2 后续研究工作 ···························································65
参 考 文 献····································································66
附录 1 ··········································································70
附录 2 ········································································73
致 谢 ·········································································75
攻读硕士学位期间已发表或录用的论文·······························76
第一章 绪论
1.1 课题来源
本课题研究内容来源于国家自然科学基金优秀青年科学基金项目"软体机器人设计与控制"(项目编号:51622506)以及上海市"科技创新行动计划"基础研究领域项目"基于软体智能材料的类人灵巧手设计与控制"(项目编号:16JC1401000).
1.2 研究背景与意义
机器人学是一门研究如何构建满足所需运动、感知等能力机器人的科学,如 今的机器人已经成为科学研究的重要工具.以工业机器人为代表的传统机器人在运动的复杂性、控制的准确性等方面已经取得了前所未有的进展.但是,人们依 然期待着适用于更多应用场景以及可以完成更加复杂任务的新型机器人的出现.
在现阶段机器人研究中,如何将"软"应用于构建新型机器人是推动机器人进一步发展所面临的挑战.解决好此类问题将会大大加快新型机器人的研发进程,进而诞生出应用领域更广泛的新一代机器人 [1].
具有弹性或柔顺性软体结构的机器人与外界接触时能够自动做出变形等动作,可以更好地应用仿生学研究成果.因此,越来越多的软体结构在机器人系统的设计中被采用.自然界中的生物利用自身柔软的组织和适应性的结构可以在复杂的自然界中高效地活动,所以对这些生物的研究可以揭示出很多有利于"软体机器人"拓展能力以及提高任务执行效率很有意义的准则."软体机器人"一词曾被用来表示具有刚性连杆和机械(或被动)柔性关节、具有可变刚度、采用柔顺或阻抗控制的机器人[2-3];之后,该词被用于强调从机器人"具有刚性连接"到"仿生连续体"的转变[4]; 然后,Trivedi[5]等人认为软体机器人不同于具有刚性连接的传统机器人,也不同于具有多刚性关节的超冗余度蛇形机器人,"软体机器人"一词应该用来描述采用软材料和柔性结构的新一代机器人.软体机器人指依赖自身材料的弹性或结构的顺应性可以经历大变形从而实现主动地与环境进行交互的机器人.其定义更加注重软体机器人与环境交互时表现出的柔顺性和变形能力.软体机器人的柔顺性使其可以自适应物体的复杂表面,接触时吸收碰撞能保持系统稳定性,表现出物理上的鲁棒性和人机交互的安全性,同时具有成本低廉的潜在优势.
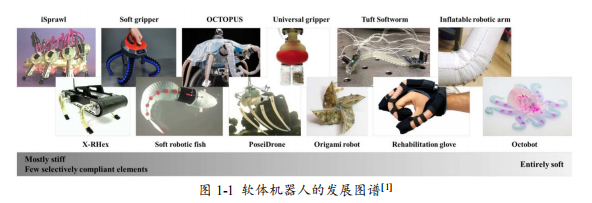
图 1-1 展示了软体机器人技术发展图谱,从纯刚性机器人逐步发展到纯软体机器人.该图谱罗列了多款主要采用软材料和变形结构制作的机器人,它们的结 构中几乎不含刚性元件,这种类型的软体机器人占据了今天软体机器人中的大多数.
软体机器人技术横跨工程学、材料学、生物学、数学、医学等诸多学科,多学科交叉的特性使其可以采用一些非常规的科学手段实现所需的功能.现已出现了拥有多种多样能力的软体机器人,它们不仅仅可以实现抓握、移动,而且可以做出诸如挤压[6]、跳跃[7]、攀爬[8]以及生长[9]等基于刚性连接传统机器人无法实现的功能,这些独特的功能为软体机器人开辟了全新的应用领域.
本论文主要研究气动软体驱动器的设计、制造、控制技术及其在软体操作手上的应用.采用有限元方法对气动软体驱动器进行仿真分析,设计并制造了缠线增强型和多腔体型两类气动软体驱动器;通过软硬件系统开发,设计了气动软体驱动器的控制平台;在此基础上,试制了软体工业抓手、仿人软体手、软体康复手套三个原型样机系统,开展了相应系统集成和实验验证工作,取得了较好的实验效果.
1.3 软体驱动器研究现状
根据软体驱动器激励信号的不同,可以将其划分为:电响应软体驱动器 [10-13]、磁响应软体驱动器 [14-21]、化学响应软体驱动器 [22] 、热响应软体驱动器 [23、24] 、 光响应软体驱动器 [25-27] 以及压力驱动软体驱动器 [28-31].以下对这六种软体驱动器分别进行介绍.
1.3.1 电响应软体驱动器
电响应软体驱动器主要涉及电致变形智能软材料的应用,这些材料包括聚合物、凝胶、流体、纸张以及独立的碳纳米管等,它们可以实现电能到机械能的转化.此类软体驱动器可以通过改变电激励信号幅度、相位以及频率的方式来调制.此外,因为电响应软体驱动器与传统的电子元器件等兼容,所以基于电子元器件的集成很容易实现.此类驱动器的研究重点有人工肌肉[11],微尺度对象操作[12]和微流控系统[13].
电响应软体驱动器的典型代表是介电弹性体驱动器,驱动器由两侧覆盖柔性电极的介电弹性体薄膜组成,施加驱动电压时,介电弹性体薄膜在电场力作用下产生变形.虽然采用这种方式设计制作的软体驱动器具有大的驱动力和驱动位移, 但其驱动电压往往要数千伏,这是阻碍其实际应用的最大挑战.
1.3.2 磁响应软体驱动器
磁响应软体驱动器主要涉及具有磁性的智能软材料.典型地,将磁性颗粒或离散的磁体掺入软体化合物中就可以制作出一款具有可变磁特性曲线的复合材料.当这种复合材料处于一个磁场中时,内嵌的磁性颗粒或附带的磁体就会试图与该磁场对齐,从而产生力矩和变形.磁场强度和磁场的空间梯度可以在很小的空间独立产生,因此可以认为磁场与磁颗粒或磁体相互作用时产生的驱动力和驱动力矩是解耦的.磁驱动可以有效地产生驱动力和驱动力矩两种独立的驱动作用进而组合实现更复杂的驱动.此类软体驱动器的变形模式可以通过改变驱动信号、驱动器整体形状以及复合材料的磁特性曲线或刚度来实现不同的设计.
因为磁场可以穿透大部分材料,所以磁响应软体驱动器可用于封闭狭小空间,特别适用于像体内靶向投送药物、显微外科手术、微流控以及体内组装等应用场景[15-17].相对其他驱动形式,磁响应驱动反应较快,频率可以达到 100Hz[18],而 且其控制与装配过程密切相关[19].现在,磁响应软体驱动器已经成功地被应用于制作游泳机器人[14]、爬行器[20]和微型泵[21]等.
然而,由于磁力缩放的不合理等原因,外部驱动的磁线圈往往比较大而且能耗很大.因此磁响应软体驱动器适用于所施加磁场和梯度具有显著强度并且易控的狭小工作空间.
1.3.3 化学响应软体驱动器
化学响应可以包含很多种响应机制,是一个相当广泛的范畴.此处限定此类驱动器主要是以液体或蒸汽形式的激励信号产生驱动,过程中常常涉及化学反应、诱导应力、诱导变形等.此外,还包括基于毛细管力的驱动器,其作用于以水为代表的流体的引入和蒸发.
化学能到机械能的转化过程称为化学机械运动.像聚合物网络、凝胶这样的软材料具有选择性地定向扩散化学物质的能力.材料中物质的扩散会引起机械应力,同时,物质在材料内部扩散过程中会发生各种化学反应.由酸、碱、有机溶剂等刺激引起的反应可以改变聚合物链之间的相互作同等,这些变化可以改变渗透压或增加链的亲和性等,最终导致材料尺寸和形状的变化.Hore 等人在一个机器人案例中应用这种原理展示了有意思的弹性滚筒上坡现象[22].其原理为: 当有机溶剂被添加到滚筒表面时,它积聚在气缸的下侧,使其膨胀,从而以足够的力将滚筒推向上,此推动力可以承载滚筒自身重量的 8 到 10 倍.
一般来说,化学响应的软体驱动器往往是高度敏感的,其响应时间可变的,主要取决于扩散速率等.但此类软体机器人的应用需要特定的液体或潮湿的化学反应条件,同时还面临着驱动力小和难以精确控制的挑战.
1.3.4 热响应软体驱动器
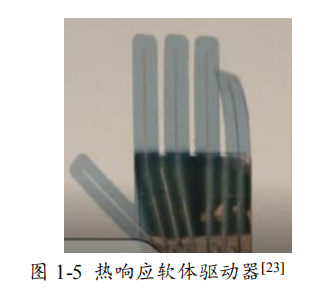
适用于热响应软体驱动器的热激励信号主要包括(近)红外光、热辐射以及焦耳加热.焦耳加热就是靠导电材料通电做功产生热.热响应驱动器可以使用激光等远程施加热激励信号,小范围或大范围都可应用.只要温度保持在 4-37℃之间此类驱动器就可以应用于活细胞[24],所以与溶剂和紫外线刺激相比热激励方式更安全.
然而,热响应的驱动器通常响应慢、效率很低.使用更薄的膜、更好的吸热材料以及高功率在一定程度上可以提高其效率.
1.3.5 光敏软体驱动器
光敏软体驱动器可以远程精确控制、快速调制,其应用主要集中在纳米尺度和微尺度[26,27].光致变色分子在合成的光学系统中发挥着重要作用,它们可以捕捉目标光信号并转化为应变等驱动信号.这种原理与自然界中的光驱动机制类似,如光诱导的视网膜分子异构化触发一系列化学反应,最终产生神经信号以及实现对光的感知.这些感光分子已经在由聚合物、凝胶、流体以及光电材料等组成的微型软体驱动器中有了应用.
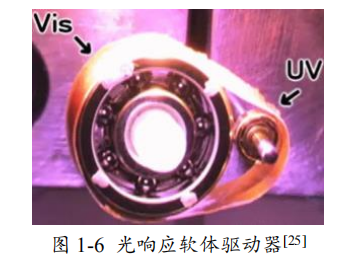
此类驱动器的应用主要受到可用的感光材料种类少以及响应速度较慢等的限 制.
1.3.6 气动软体驱动器
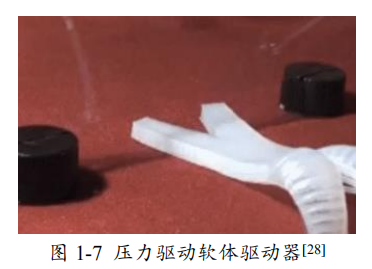
气动软体驱动器根据驱动方式的不同可归类为:伸长驱动器、收缩驱动器、扭转驱动器和弯曲驱动器[29].所有的这些驱动都对驱动器结构中刚度的空间分布进行设计,从而使它们可以在气压下产生期望的变形.驱动器材料一般选为硅胶.基于气动软体驱动器,哈佛大学 George M. Whitesides 研究组研发出了充气式蠕动软体机器人[28],日本冈山大学研发了气动软体机器鱼[30],北京航空航天大学机器人研究所研发了一款气动仿生蝠鲼机器鱼[31].
研究表明,小型气动软体驱动器就可以产生较大的力.相比其它驱动方式,这类采用压力信号激励的驱动器的应用所受限制因素很少.因此,以气动弹性体驱动器为代表的气动软体驱动器在近几年成为研究人员关注的焦点.此类驱动器的应用不需要高的电、磁场;主要材料是硅胶,容易获得且成本低,并且对人体安全.此类驱动器的优点可以概括为结构简单、变形能力强、柔顺性好、功率质量比高、响应速度快、制造成本低以及控制简单.所以,本研究选取气动软体驱动器作为研究对象.
1.4 论文内容及章节安排
本论文主要研究气动软体驱动器的设计、制造、控制技术及其在软体操作手上的应用.采用有限元分析法对气动软体驱动器进行仿真分析,设计并制造了缠线增强型和多腔体型两类气动软体驱动器;通过软硬件系统开发,设计了气动软体驱动器的控制平台;在此基础上,试制了软体工业抓手、软体仿人手、软体康复手套三个原型样机系统.
论文的章节安排如下:
第一章,对软体机器人技术进行了简单介绍,基于不同类型软体驱动器特点的分析,选取气动软体驱动器作为本论文的研究对象;
第二章,简单介绍了纤维增强型和多腔体型两类常见的气动软体驱动器的工作原理并进行了理论分析,采用有限元方法对两类驱动器的重要结构参数进行分析;
第三章,概述了现有的气动软体驱动器制作工艺,选用 3D 模型法制作两类气动软体驱动器并进行了相关的性能测试;
第四章,根据气动软体驱动器的工作特点设计了通用性的控制系统,主要包括硬件系统的搭建和软件系统的开发;
第五章,基于以上研究成果试制了软体工业抓手、软体仿人手以及软体康复手套原型样机系统;
在第六章中,总结本研究中所取得的研究成果并规划下一步研究可以展开的方向.
…………由于本文篇幅较长,部分内容省略,详细全文见文末附件
第六章 总结与展望
6.1 主要工作与创新点
本文对软体机器人技术中的气动软体驱动器进行了较深入的研究,主要包括对其工作原理的分析、驱动器性能与其结构参数关系的有限元仿真分析、软体驱动器及其控制系统的设计制作以及基于气动软体驱动器的软体工业抓手、软体仿人手和软体康复手套实现.
本文的创新点是在充分分析气动软体驱动器工作原理和特性的基础上将其进行应用,充分利用驱动器自身的非线性优势;设计出一套针对气动软体驱动器的通用性便携式控制设备,并开发了配套的人机交互软件;该控制设备采用系统中集成微型电动气泵的方式解决了气动软体系统因需要外接气源而造成的系统不独立问题;制作的三款气动软体操作手为对应的应用场景提供了不同于传统机器人的全新解决方案 .
综上,本研究对软体机器人今后的应用及进一步发展具有积极的推动作用.
6.2 后续研究工作
尽管软体机器人凭借有别于传统刚性机器人的独特优势得到了广泛研究并取得了快速发展,但现阶段纯软的软体机器人还存在很多缺点.软体机器人技术依然可以通过向自然界的生物学习来进行改进,如学习生物的形变能力以及生长过程中展现出的对环境的适应性改变甚至其身体的自修复能力等.
如果仔细观察自然中的生物体可以发现,纯软体的动物往往比较小,而体型较大的动物通常需要骨架结构来支撑整个身体的重量.虽然在水中(例如水母)或地下(如巨蚯蚓)也存在体型较大的无骨骼生物,但它们的身体往往被周围介质所支撑.这一生物学证据表明在软体机器人的研究中也可以尝试将软材料与刚性结构相结合这一设计理念.这种设计将会增加软体机器人对环境施加的力等,可以大大增加它们的应用潜力.所以,接下来将尝试将软体机器人的设计中结合刚性结构来进一步研究.
同时,随着计算机技术的快速发展,接下来可以尝试研究基于学习的控制方法来实现对具有复杂非线性行为软体驱动器的控制等.
参 考 文 献
[1] Laschi C, Mazzolai B, Cianchetti M. Soft robotics: Technologies and systemspushing the boundaries of robot abilities[J]. Sci. Robot., 2016, 1(1): eaah3690.
[2] Albu-Schaffer A, Fischer M, Schreiber G, et al. Soft robotics: what cartesianstiffness can obtain with passively compliant, uncoupled joints[C]//IntelligentRobots and Systems, 2004.(IROS 2004). Proceedings. 2004 IEEE/RSJInternational Conference on. IEEE, 2004, 4: 3295-3301.
[3] Albu-Schaffer A, Eiberger O, Grebenstein M, et al. Soft robotics[J]. IEEE Robotics& Automation Magazine, 2008, 15(3).
[4] D. Trivedi, C. D. Rahn, W. M. Kier, I. D. Walker, Soft robotics: Biologicalinspiration, state of the art, and future research. Appl. Bionics Biomech. 5, 99-117(2008).
[5] Trivedi D, Lotfi A, Rahn C D. Geometrically exact models for soft roboticmanipulators[J]. IEEE Transactions on Robotics, 2008, 24(4): 773-780.
[6] Jayaram K, Full R J. Cockroaches traverse crevices, crawl rapidly in confinedspaces, and inspire a soft, legged robot[J]. Proceedings of the National Academyof Sciences, 2016, 113(8): E950-E957.
[7] Lin H T, Leisk G G, Trimmer B. GoQBot: a caterpillar-inspired soft-bodied rollingrobot[J]. Bioinspiration & biomimetics, 2011, 6(2): 026007.
[8] Kim S, Spenko M, Trujillo S, et al. Smooth vertical surface climbing withdirectional adhesion[J]. IEEE Transactions on robotics, 2008, 24(1): 65-74.
[9] Sadeghi A, Tonazzini A, Popova L, et al. A novel growing device inspired by plantroot soil penetration behaviors[J]. PloS one, 2014, 9(2): e90139.
[10] Christianson C, Goldberg N N, Deheyn D D, et al. Translucent soft robots drivenby frameless fluid electrode dielectric elastomer actuators[J]. Science Robotics,2018, 3(17): eaat1893.
[11] Hines L, Petersen K, Lum G Z, et al. Soft Actuators for Small‐Scale Robotics[J].
Advanced Materials, 2017, 29(13).
[12] Jager E W H, Ingan?s O, Lundstr?m I. Microrobots for micrometer-size objects inaqueous media: potential tools for single-cell manipulation[J]. Science, 2000,288(5475): 2335-2338.
[13] Raghavan R V, Qin J, Yeo L Y, et al. Electrokinetic actuation of low conductivitydielectric liquids[J]. Sensors and Actuators B: Chemical, 2009, 140(1): 287-294.
[14] Diller E, Zhuang J, Zhan Lum G, et al. Continuously distributed magnetizationprofile for millimeter-scale elastomeric undulatory swimming[J]. Applied PhysicsLetters, 2014, 104(17): 174101.
[15] Diller E, Giltinan J, Lum G Z, et al. Six-degree-of-freedom magnetic actuation forwireless microrobotics[J]. The International Journal of Robotics Research, 2016,35(1-3): 114-128.
[16] Kummer M P, Abbott J J, Kratochvil B E, et al. OctoMag: An electromagneticsystem for 5-DOF wireless micromanipulation[J]. IEEE Transactions on Robotics,2010, 26(6): 1006-1017.
[17] Tasoglu S, Diller E, Guven S, et al. Untethered micro-robotic coding ofthree-dimensional material composition[J]. Nature communications, 2014, 5:
3124.
[18] Garstecki P, Tierno P, Weibel D B, et al. Propulsion of flexible polymer structuresin a rotating magnetic field[J]. Journal of Physics: Condensed Matter, 2009,21(20): 204110.
[19] Diller E, Giltinan J, Sitti M. Independent control of multiple magnetic microrobotsin three dimensions[J]. The International Journal of Robotics Research, 2013,32(5): 614-631.
[20] Khoo M, Liu C. Micro magnetic silicone elastomer membrane actuator[J]. Sensorsand Actuators A: Physical, 2001, 89(3): 259-266.
[21] Lee H, Kim J, Kim J, et al. Programming magnetic anisotropy in polymericmicroactuators[J]. Nature materials, 2011, 10(10): 747.
[22] Hore D, Majumder A, Mondal S, et al. How to make a cylinder roll uphill[J]. SoftMatter, 2012, 8(18): 5038-5042.
[23] Taccola S, Greco F, Sinibaldi E, et al. Toward a new generation of electricallycontrollable hygromorphic soft actuators[J]. Advanced Materials, 2015, 27(10):
1668-1675.
[24] Stroganov V, Zakharchenko S, Sperling E, et al. Biodegradable Self‐FoldingPolymer Films with Controlled Thermo‐Triggered Folding[J]. AdvancedFunctional Materials, 2014, 24(27): 4357-4363.
[25] Yamada, Munenori, et al. "Photomobile polymer materials: towards light‐drivenplastic motors." Angewandte Chemie International Edition 47.27 (2008):
4986-4988.
[26] Ercole F, Davis T P, Evans R A. Photo-responsive systems and biomaterials:
photochromic polymers, light-triggered self-assembly, surface modification,fluorescence modulation and beyond[J]. Polymer Chemistry, 2010, 1(1): 37-54.
[27] Wei J, Yu Y. Photodeformable polymer gels and crosslinked liquid-crystallinepolymers[J]. Soft Matter, 2012, 8(31): 8050-8059.
[28] Shepherd, Robert F., et al. "Multigait soft robot." Proceedings of the nationalacademy of sciences 108.51 (2011): 20400-20403.
[29] Gorissen B, Chishiro T, Shimomura S, et al. Flexible pneumatic twisting actuatorsand their application to tilting micromirrors[J]. Sensors and Actuators A: Physical,2014, 216: 426-431.
[30] Suzumori K, Endo S, Kanda T, et al. A bending pneumatic rubber actuatorrealizing soft-bodied manta swimming robot[C]//Robotics and Automation, 2007IEEE International Conference on. IEEE, 2007: 4975-4980.
[31] Cai Y, Bi S, Zheng L. Design and experiments of a robotic fish imitatingcow-nosed ray[J]. Journal of Bionic Engineering, 2010, 7(2): 120-126.
[32] Wang B, McDaid A, Biglari-Abhari M, et al. A bimorph pneumatic bendingactuator by control of fiber braiding angle[J]. Sensors and Actuators A: Physical,2017, 257: 173-184.
[33] Chou C P, Hannaford B. Measurement and modeling of McKibben pneumaticartificial muscles[J]. IEEE Transactions on robotics and automation, 1996, 12(1):
90-102.
[34] softroboticstoolkit.
[35] Galloway K C, Polygerinos P, Walsh C J, et al. Mechanically programmable bendradius for fiber-reinforced soft actuators[C]//Advanced Robotics (ICAR), 201316th International Conference on. IEEE, 2013: 1-6.
[36] Polygerinos P, Wang Z, Overvelde J T B, et al. Modeling of soft fiber-reinforcedbending actuators[J]. IEEE Transactions on Robotics, 2015, 31(3): 778-789.
[37] Ogden R W. Non-linear elastic deformations[M]. Courier Corporation, 1997.
[38] Polygerinos P, Lyne S, Wang Z, et al. Towards a soft pneumatic glove for handrehabilitation[C]//Intelligent Robots and Systems (IROS), 2013 IEEE/RSJInternational Conference on. IEEE, 2013: 1512-1517.
[39] Yeoh O H. Some forms of the strain energy function for rubber[J]. RubberChemistry and technology, 1993, 66(5): 754-771.
[40] Gorissen B, Reynaerts D, Konishi S, et al. Elastic Inflatable Actuators for SoftRobotic Applications[J]. Advanced Materials, 2017.
[41] Whitesides, George M., and Abraham D. Stroock. "Flexible methods formicrofluidics." Phys. Today 54.6 (2001): 42-48.
[42] Guo W, Sheng X, Liu J, et al. Towards zero training for myoelectric control basedon a wearable wireless semg armband[C]//Advanced Intelligent Mechatronics (AIM), 2015 IEEE International Conference on. IEEE, 2015: 196-201.