24小时论文定制热线
24小时论文定制热线
摘 要
U 型钢管是由细长的直线钢管通过弯管工艺冷弯而成的,在热交换器等设备上有着广泛的应用.本课题针对原冷弯现场笨重的搬运取料设备需要更换的问题,设计开发一套轻便且自动化程度高的抓取搬运机械手,不仅提高了冷弯工艺的生产效率,而且降低了工人劳动强度和人工成本.
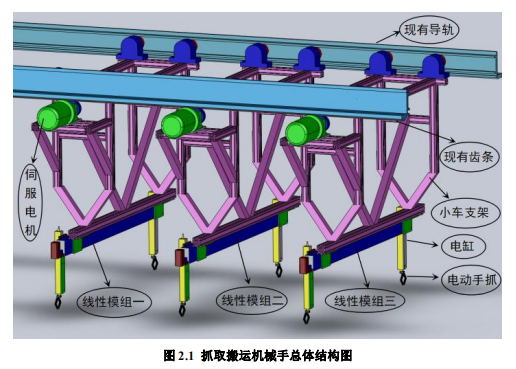
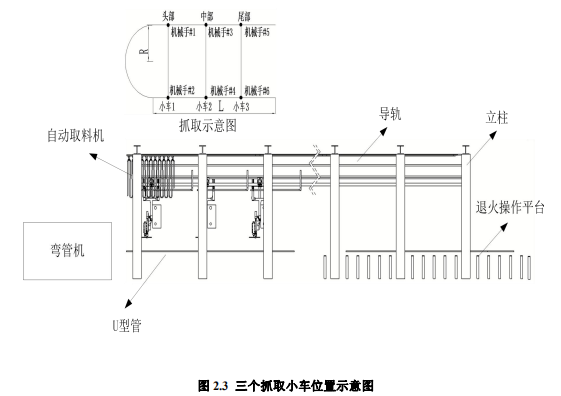
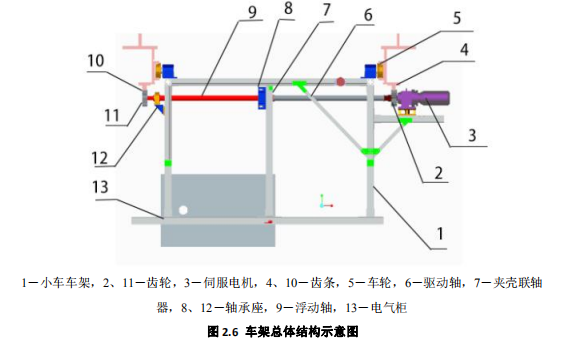
本文在了解原来弯管工艺和取料机构的基础上,针对不同规格的 U 型钢管(弯管半径 0.2m~1.2m,弯管管脚长度 0.3m~1.4m).利用原取料设备的车轮、轨道和齿条,构建三个小车同轨,每个小车均采用两只机械手爪的抓取搬运机械手方案.机械手爪安装在电缸推杆的末端,电缸采用成对安装,一个固定在小车车架上,另一个安装在横移线性模组的滑块上.通过控制小车车架上的伺服电机调整三组线性模组上机械手爪之间的纵向距离,以此适应弯管管脚长度的变化.线性模组经滑块带动电缸及其上的机械手爪的横向移动,以此适应弯管的半径变化.输入某弯管型号后,系统自动调整三组机械手之间的距离,使得三组(六只)机械手分别位于当前弯管的头部、中部和尾部.
本文对 U 型钢管抓取搬运机械手的主要零部件进行了力能参数的计算和选型.其中主要零部件包括控制行走小车纵向移动和横移模组上的伺服电机、控制机械手升降的电缸、手爪电机、机械手爪等部件,确定各个部件的型号及相关参数.
最后,运用 Creo3.0 建立机械手的三维模型并进行虚拟装配.在充分考虑启制动时惯性力对抓取搬运机械手瞬间的应力状态和手抓变形位移后,通过 ANSYSworkbench 软件对其进行详细的有限元分析.根据机械手爪在不同的加速度下的应力和变形图,对比分析有限元分析的结果和现场调试的结果相近,表明所设计的结构和有限元分析所建议的加速度分析结果符合整个抓取搬运机械手的工艺设计要求.
关键词:U 型钢管;机械手;抓取;搬运;Creo3.0 三维建模;ANSYS 分析
Abstract
U-shaped steel pipe is made of long and thin straight steel pipe through pipe bendingprocess. It is widely used in heat exchanger and other equipment.This project aims at theproblem that the heavy material handling and fetching equipment in the original coldbending site needs to be replaced. It designs and develops a set of light and highlyautomated grasping and handling manipulator, which not only improves the productionefficiency of cold bending process, but also reduces the labor intensity and labor cost ofworkers.
In this paper, based on the understanding of the original pipe bending process and thematerial taking mechanism, according to different specifications (bending radius 0.2m ~1.2m, pipe bending pin length 0.3m ~ 1.4m), the use of the wheel, rail and rack of theoriginal material taking equipment to build three with the same rail car, each car is usingtwo manipulator grasp handling manipulator scheme.The mechanical claw is installed atthe end of the electric cylinder push rod, and the electric cylinder is installed in pairs, oneis fixed on the trolley frame, and the other is installed on the sliding block of the horizontallinear module.By controlling the servo motor on the trolley frame to adjust the longitudinaldistance between the mechanical claws on the three linear modules so as to adapt to thechange of the length of the elbow pin.The linear module makes the slider drive the electriccylinder and its mechanical gripper to make lateral movement to adapt to the radius changeof the elbow. After a certain elbow type is input, the system automatically adjusts thedistance between the three groups of manipulator, so that three groups (six) manipulatorare located at the head, middle and tail of the current elbow.
The calculation and selection of force and energy parameters of the main parts of themanipulator are carried out. The main parts include the servo motor which controls thelongitudinal movement and transverse movement of the trolley, the electric cylinder whichcontrols the mechanical hand to move up and down, the gripper motor, the mechanicalgripper and other parts, and the models and related parameters of each part are determined.
Finally, Creo 3.0 is used to build a three-dimensional model of the manipulator andmake virtual assembly. After fully considering the instantaneous stress state anddeformation displacement of the grasping and handling manipulator caused by inertia forceduring starting and braking, the detailed finite element analysis is carried out by ANSYSworkbench software. According to the stress and deformation diagrams of the gripperAbstractunder different acceleration, it is concluded that the results of finite element analysis aresimilar to those of field debugging. The structure designed in this paper and the results ofacceleration analysis recommended by finite element analysis are in line with therequirements of the technological design of the whole grasping and handling manipulator.
Key words: U-shaped steel pipe; Manipulator; Grab; Handling; Creo3.0 3D modeling;ANSYS analysis
目 录
摘 要............................................................................................................................I
Abstract.......................................................................................................................II
目 录........................................................................................................................... II
第一章 绪 论............................................................................................................... 1
1.1 课题的研究背景及意义......................................................................................... 1
1.1.1 课题研究背景...................................................................................................... 1
1.1.2 课题研究意义...................................................................................................... 3
1.2 U 型钢管搬运抓取机械手国内外现状...................................................................... 3
1.3 论文主要研究内容及研究方法................................................................................... 8
第二章 U 型钢管抓取搬运机械手的总体方案设计.......................................................... 10
2.1 U 型钢管抓取搬运机械手的设计要求...................................................................... 10
2.1.1 U 型钢管抓取搬运机械手的总体结构.................................................................... 10
2.2 抓取搬运机械手的总体方案设计.............................................................................. 13
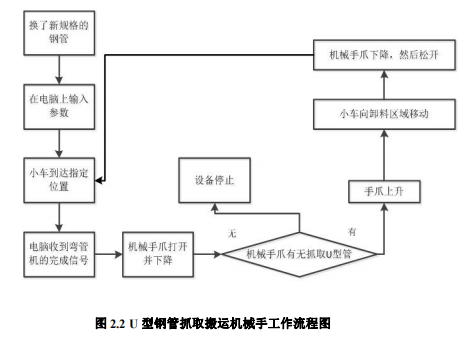
2.3 抓取搬运机械手的工作原理..................................................................................... 13
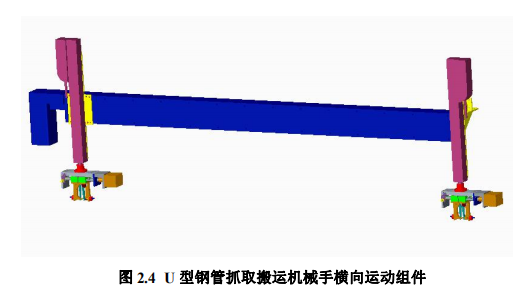
2.4 机械手横向移动的设计及工作原理........................................................................... 15
2.5 纵移机构的设计及工作原理..................................................................................... 16
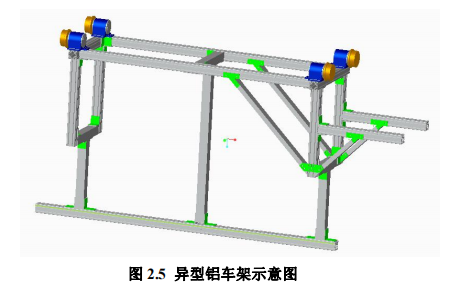
2.5.1 异型铝车架的设计思路及工作原理......................................................................... 16
2.5.2 驱动纵移机构的设计及工作原理............................................................................ 17
2.6 机械手组件的设计思路及工作原理............................................................................. 18
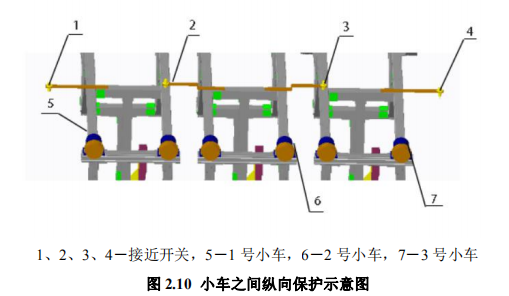
2.7 小车主要运动方向上的保护装置的设计及工作原理.................................................... 20
2.7.1 小车纵向运动的保护装置的设计及其工作原理......................................................... 20
2.7.2 小车横向运动的保护装置的设计及其工作原理......................................................... 21
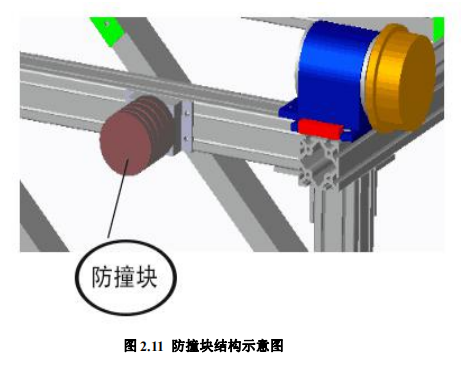
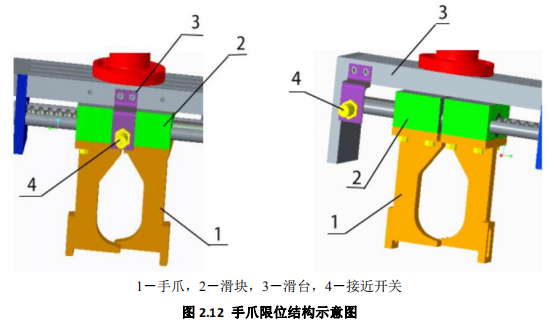
2.7.3 机械手抓取运动时的保护装置的设计思路及其工作原理.......................................... 21
2.8 本章小结...................................................................................................................... 22
第三章 抓取搬运机械手的主要设备的理论参数计算及选型................................................ 23
3.1 纵移小车的电机功率计算及选型................................................................................... 23
3.2 横移模组电机功率计算及选型.................................................................................... 27
3.3 手爪电机选型............................................................................................................ 30
3.4 垂直升降电缸选型......................................................................................................... 31
3.5 接近开关选型................................................................................................................. 33
3.6 夹壳联轴器的计算及选型............................................................................................... 35
3.7 本章小结........................................................................................................ ................37
第四章 抓取搬运机械手主要零部件的结构设计及三维建模................................................. 39
4.1 齿轮传动系统................................................................................................................ 39
4.1.1 齿轮传动的结构介绍..................................................................................................39
4.1.2 齿轮传动的三维建模................................................................................................. 41
4.2 手爪弹簧摆杆夹紧装置................................................................................................. 42
4.2.1 弹簧夹紧装置的设计思路及工作原理......................................................................... 42
4.2.2 弹簧摆杆夹紧装置的三维建模...................................................................................... 43
4.3 车轮组的三维建模及结构设计....................................................................................... 43
4.3.1 车轮组的设计思路及工作原理...................................................................................... 43
4.3.2 车轮组的三维建模........................................................................................................ 44
4.4 可调电机底座的三维设计............................................................................................... 45
4.5 各部件装配体的三维模型............................................................................................... 45
4.6 U 型钢管抓取搬运机械手的总体装配............................................................................... 46
4.7 本章小结........................................................................................................................... 47
第五章 机械手各加速度状态下的 ANSYS 分析........................................................................48
5.1 ANSYS Workbench 软件与 Creo3.0 的数据转换............................................................. 49
5.1.1 ANSYS Workbench 软件介绍......................................................................................49
5.1.2 ANSYS Workbench 与 Creo3.0 的数据交互.................................................................. 49
5.2 抓取搬运机械手小车有限元模型................................................................................... 50
5.2.1 机械手三维模型的简化.................................................................................................. 50
5.2.2 抓取搬运机械手的模型材料属性.................................................................................... 52
5.2.3 模型的网格划分........................................................................................................... 53
5.2.4 添加约束与载荷........................................................................................................... 55
5.3 抓取搬运机械手加速度状态下的结果与分析...................................................................... 57
5.4 本章小结............................................................................................................................. 63
第六章 总结与展望....................................................................................................................... 64
6.1 总结....................................................................................................................................... 64
6.2 展望........................................................................................................................................... 64
参考文献.................................................................................................................................. 66
第一章 绪 论
1.1 课题的研究背景及意义
1.1.1 课题研究背景
在当今的大规模制造业中,企业通常专注于生产过程的自动化,以提高生产效率和确保产品质量.作为自动化生产线的重要成员,工业机器人逐渐被公司认可和采用[1].由于科学技术的快速发展和市场需求的快速更新,在当前的生产形势和社会环境中,只有不断的提高产品的本身的质量和产量并降低产品的成本才能有效的提高产品在市场上的竞争力.企业只有全面把握这三者,才能在市场竞争中立于不败之地. 因此,在产品制造领域,特别是在批量产品的生产中,产品的自动化制造方法已被广泛应用.工业机器人在自动化生产中起着非常重要的作用,从提高产品质量和效率和节省劳动力成本的观点来看,工业机器人代替人工是不可避免的发展趋势[2].
工业机器人的技术和应用水平在一定程度上反映了国内工业自动化的水平,目前,工业机器人主要承担重复性且劳动强度极大的工作,如焊接、喷涂、搬运以及堆垛[3].随着人类科学技术的不断发展,机器人应用的空间越来越广泛,未知的环境对机器人产品的功能提出了更高的要求,促进了机器人技术的不断提高[4].工业机器人的应用,很大程度上释放人类单调和重复性的劳动,让人类有更多的时间去做一些研究性的工作.因此,许多具有先进意识的公司正在推进工业机器人的引进,以用来去执行那些复杂而又危险系数较高的任务.工业机器人的广泛应用逐渐改善了人类的生活方式和生产方式,并在提高人类生活水平和生活质量方面发挥着重要的作用[5].
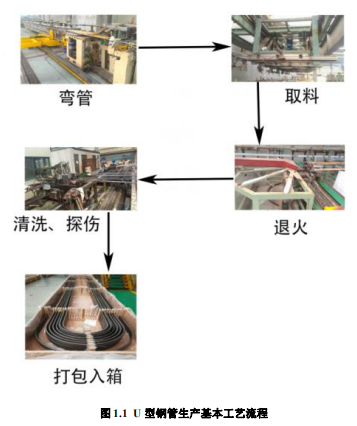
某公司 U 型钢管制造的原材料是不同截面尺寸和不同长度的直线钢管,经过弯管工艺制造成不同弯管半径和弯管管脚长度的 U 型钢管,弯管工艺的主要流程是首先将成捆的直线钢管由行车吊运放至上料台,再从上料台一根一根地分解搬运到纵移轨道上,按照弯管机的工作节拍由纵移轨道将直线钢管运到弯管机中,并固定住一端,其次由弯管机的横纵移机构使直线钢管实现冷弯曲,打开弯管机的锁紧装置,然后由取料装置将 U 型钢管抓取提起纵移至退火工作台进行退火工序的操作,在退火完成后通过车间行车运输到清洗操作台对 U 型钢管进行钢管内部的清洗工序,清洗过后的 U 型钢管进行探伤检测,不满足检测结果的 U 型钢管直接淘汰去除,合格的 U 型钢管打包入箱,并且在箱子表面贴上标纸,注明生产信息.U 型钢管生产加工过程见下图 1.1.
原有 U 型钢管取料设备是一台纵移运输车和 6 个能垂直升降的机械手组成,见图 1.2.纵移运输车吊在两边高空轨道中行走,取料设备因机构本体使用钢材,设备笨重,取料过程中行走缓慢.由于惯性大难以控制行走速度,运送效率低下,满足不了生产节拍的要求,而且结构振动剧烈,噪声大.在原有的弯管机取料系统中,抓取过程中需要操作工手动逐个的去调整两边机械手的横向距离,这种方法耗时、麻烦,且机械手的抓取精度和自动化程度较低.在现场操作中,因操作工的错误操作导致现场工作人员受伤的事例时而发生.为提高弯管生产线自动化程度,提高工作效率,减少人工成本和减小工人受伤的概率,需在原有设备的轨道架基础上重新设计 U 型钢管弯管机取料设备.
原取料设备自从安装使用后频频出现问题,现在已经停止使用.实际生产中,当弯管机完成弯管工序后,现场由人工抬起运至退火操作台,工人劳动强度大且人工成本高.

1.1.2 课题研究意义
本文设计的 U 型钢管抓取搬运机械手采用智能抓取机器人和人机交互技术,通过对三台抓取搬运小车上的六个机械手三个运动方向的位移控制,实现不同规格 U型钢管的自动抓取搬运功能.同时大大减轻了运输小车的重量,减小运行惯性,便于运输车纵向运动的速度控制,提高弯管生产线的生产效率.在抓取搬运的过程中本机械手采用了实时监测的功能,能对机械手在抓取搬运过程中的各个动作进行监测和调整.本抓取搬运机械手具有以下优点:抓取搬运精度高、结构紧凑、质量轻惯性小,全程智能自动抓取搬运不同规格的 U 型钢管.U 型钢管抓取搬运机械手项目的成功改造,能够有效的提高 U 型钢管生产线的自动化水平,减轻操作工人的劳动强度和人工成本,同时,能够减小在抓取搬运过程中的振动和噪音,降低操作人员在操作过程中的误操作伤害.
1.2 U 型钢管搬运抓取机械手国内外现状
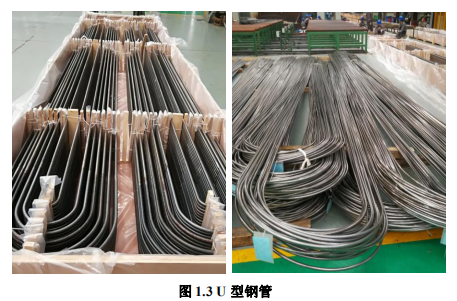
U 型钢管制造简单,成本低廉,被广泛应用于锅炉行业的换热器中.换热器,又称热交换器[6],是将热流体的部分能量传递给冷流体的设备,所以生产的 U 型钢管需要承担一定的温差和压力.U 型钢管实物图如图 1.3 所示.
传统的 U 型钢管生产方法自动化程度较低,为了提高其生产效率,预计未来 U型钢管生产线的自动化程度将越来越高.U 型钢管的制造商们面临着升级转型,国际高端制造与国际分工的重大挑战[7].当今社会发展的趋势下,工业机器人在 U 型钢管制造中的应用将越来越广泛,工业机器人在工作中比传统工作更高效,工业机器人的投入使用减少了劳动力的成本,同时也降低了事故发生的概率,机器逐渐取代人工劳动力这一现象已经成为未来发展的大趋势.
常规的直线钢管搬运过程中利用钢管可以在倾斜的支架上进行滚动的特点,设计一些分料臂、步进梁等执行装置[8]用来完成在钢管成形工序后对钢管进行一个拨动操作使钢管落到倾斜操作面上,从而通过斜面自动滚落到操作台上,进行下一道工序的操作.但 U 型钢管抓取搬运的过程与常规钢管不同,U 型钢管无法在斜面上进行滚动,U 型钢管的抓取和搬运相当于取料机构要同时抓取两根相互连接的钢管,因此,U 型钢管的抓取搬运过程是在一个平面上抓取,在空间上运输的位移运动.
本文所设计的抓取搬运机械手是用来抓取 U 型钢管,U 型钢管的自动化生产线包括弯管工序、搬运工序以及退火工序.在弯管工序和退火工序之间需要进行搬运工序,对 U 型钢管进行一个抓取搬运的过程.原取料机构结构过于笨重,在运行过程中经常出现卡死现象,且在更换不同规格的 U 型钢管时,需要人工去调整两个机械手爪之间的横向距离去适应更换规格过后的 U 型钢管,自动化程度低且安全系数不高,不满足"智能工厂"[9]的发展趋势.
国外对于 U 型钢管的抓取搬运这方面研究较少.目前,国外主要的 U 型钢管生产企业用于取料工序的设备大多数很笨重,危险系数高,通常是操作人员使用手动辅助车进行 U 型钢管的生产和运输[10-11].跟本文研究的机械手相似度较高的是钢管打包设备.图 1.4 是德国研发的一种钢管打包机设备.

目前在中国 U 型钢管的生产量巨大,为了提高 U 型钢管的生产制造能力,中国在 U 型钢管收集研究方面投入了大量的人力和经济资源.国内很多钢铁公司已经开发出抓取搬运 U 型钢管的工业机器人,使用较多的是桁架式结构的取料机器人,完成 U 型管在空间水平上的运输.根据抓取 U 型钢管的方式不同,可分为单根 U 型钢管和单捆 U 型钢管抓取式桁架机器人.伴随着智能技术在中国的快速发展,视觉处理,红外定位等先进技术将慢慢的应用到抓取搬运设备系统中去.
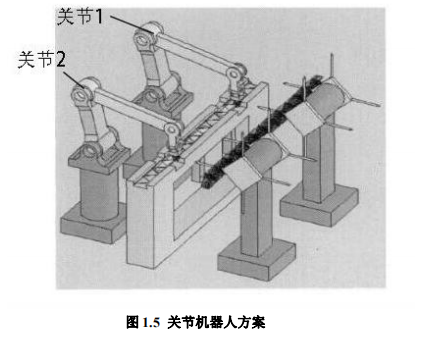
胡正义[12]针对珍珠岩夹心板进行改进,该设备主要是将已经加工好的钢丝芯架交错地放置到操作台.传统的搬运方法是手工搬运,由于生产规模的扩大和劳动成本的提高,越来越多的企业采用工业机器人去代替人工劳动.机械手完成的动作为定位-挟持-移动-放置,位姿方面较简单,末端执行器采用二指平行机构,如图 1.5 所示.从电机输出的扭矩通过具有自锁功能蜗轮蜗杆机构传递给齿轮,通过齿轮传动将扭矩传递给关节 1;关节 2 距离驱动装置较远,同样选择齿轮传动的情况下会导致结构的重量变大,不利于机械手爪的控制和搬运工作,因此选用钢带传动来传递由驱动电机输出的扭矩到关节 2.
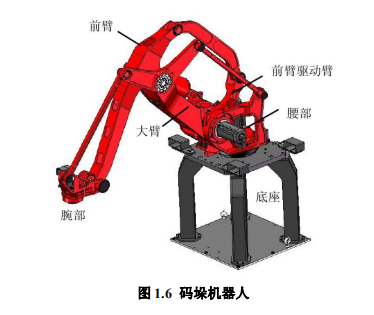
曹家鑫[13]设计的码垛机器人的生产节拍为 800 次/小时,重复定位精度为 0.5mm,承载能力为 300kg.整个机器人结构是由很多杆件通过转动关节连接而成,主要结构有底座、腰部、前驱动臂、腕部、前臂和大臂.在在空间上完成四个运动:腰部以上绕底座的旋转运动、大臂的上下运动、前臂的前后运动和腕部的回转运动.通过在腕部上加装机械手爪来抓放物品,与常规的串联式机器人相比,该机器人的运行方式是将电机安装在前臂的驱动臂和腰部的连接处,通过大臂外侧的平行四边形机构使前臂和前臂驱动臂同时运动,优化了码垛机器人的动力学性能;通过两组相互耦合的平行四边形机构确保了腕部结构的水平状态.码垛机器人如图 1.6 所示.
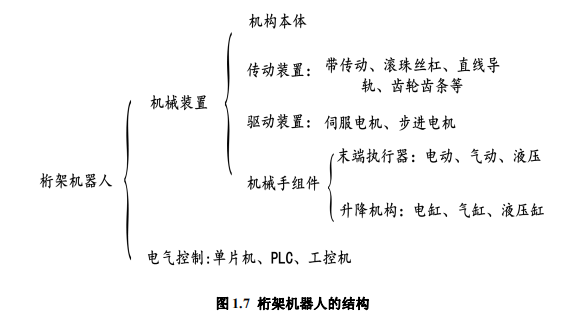
与本课题联系最密切要是桁架式机器人,桁架式机器人主要有机构本体、传动装置、驱动装置和机械手组件四部分构成[14].传动装置主要包括带传动、滚珠丝杆、齿轮齿条等;驱动装置一般采用伺服电机和步进电机,用以使末端执行器产生相应的动作;控制系统根据输入程序向驱动装置和末端执行器发送命令信号,对其进行控制[15-16].桁架机器人结构如图 1.7 所示.
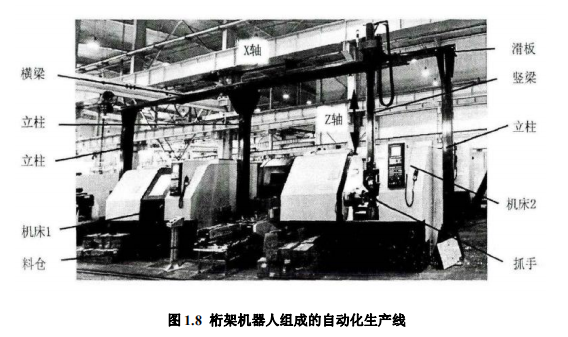
亚晓丹[17]对桁架式机床上下料机器人进行了改进分析,如图 1.8 所示.该机器人的结构本体主要由竖梁、横梁、滑板、机床、支柱和机械手爪等组成.横梁和立柱在结构中起支撑的作用,滑板在竖梁上做直线运动,带动机械手爪完成抓取的工作.一般情况下,滑板在横梁上的横向运动定义为 X 轴;滑板在竖梁上的垂直运动定义为 Z轴.整个支撑结构是底座、横梁和立柱组成的矩形框架结构,该结构具有更好的结构刚度和运动稳定性.此机器人的传动方式采用了齿轮齿条的传动,其优点在于传动精度较高,传递动力大,齿轮齿条可以在工况条件恶劣且环境复杂多样的情况下工作,而且制造方便.通过减速器减速过后的伺服电机跟齿轮相连,通过齿轮与齿条的啮合传动,将伺服电机的旋转运动转化为了齿轮在齿条上的直线运动,选用带抱闸功能的伺服电机,在机器人发生设备故障时伺服电机可以带动整个机器人紧急制动,降低了危险发生的概率.
在经济和科技技术的不断发展的今天,制造业的产业结构和生产能力必然将不断的更新,智能化、自动化越来越成为当代制造业发展水平的潮流.与工业机器人相比,传统的设备技术落后,生产效率低下,不能满足现代产品的生产制造要求,且无法跟工业机器人一样自动的衔接前后工序,行成完整的自动化生产线[18].在 U 型钢管抓取搬运这方面,桁架式机器人是未来发展的主流.随着智能化、自动化技术的发展,更多新型技术将会应用到桁架机器人上,未来的桁架机器人将更加智能、准确和灵活[19].
1.3 论文主要研究内容及研究方法
(1)U 型钢管抓取搬运机械手总体方案的设计
根据 U 型钢管抓取搬运机械手的技术要求,制定机械手的总体方案,确定机械手的工作原理和结构.本文设计的 U 型钢管抓取搬运机械手实现对不同型号的 U 型钢管抓取、运输和放置等功能;通过人机界面选择不同弯管的型号,系统可自动精确调整机械手的位置,有效提高弯管机取料效率,降低人工劳动强度.
(2)主要设备的力能参数计算及选型
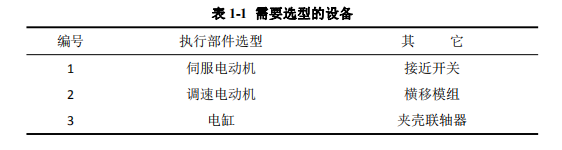
对伺服电机、调速电机电缸等执行部件进行力能参数计算和选型,根据两根传动轴之间的连接条件进行计算并选择夹壳联轴器型号;最后在整个机械手的几个运动方向上完成保护装置接近开关的选型.需要选型的设备见表 1-1.
(3)三维模型设计及虚拟装配
使用 Creo3.0 软件对抓取搬运机械手建立三维模型并装配,主要包括 U 型钢管抓取搬运机械手及配套的钢管夹紧装置,确定一个伺服电机同时带动两侧的齿轮齿条传动方式,分析齿轮齿条在啮合传动时对安装条件要求,从而设计调整齿轮间隙调整装置;绘制抓取搬运机械手的主要零部件和三维实体模型,包括车架结构,立柱横梁、导轨、拖链和控制柜等零件.
(4)基于有限元的惯性力仿真
三维装配完成后,生成 step 文件,导入 ANSYS 软件中,添加相关边界约束条件和载荷,对整个抓取搬运机械手在加速度产生的惯性力下,进行分析整个抓取搬运机械手的变形以及应力变化情况,通过跟现场对伺服电机进行控制加速度来进行设备调试的结果相结合,最终确定抓取搬运机械手在运行过程中启动和制动的加速度,使小车可以实现平稳运行,符合抓取搬运机械手的使用要求.
…………由于本文篇幅较长,部分内容省略,详细全文见文末附件
第六章 总结与展望
6.1 总结
通过了解原有一体式U 型钢管移载搬运机构和结合该公司现有的 U 型钢管规格、生产节拍和移载机构抓取搬运的基本工作流程,研制了出了 U 型钢管抓取搬运机械手.抓取搬运机械手通过三组电机分别控制三组机械手(每组两个)三个运动方向上的位移来实现了不同 U 型钢管的自动抓取.在设计 U 型钢管抓取搬运机械手前期,查看了大量 U 型钢管取料设备的发明专利和参考文献,并且对此进行了整理和研究.
本文的主要研究内容包括以下几个部分:
(1)对 U 型钢管抓取搬运机械手进行了总体方案设计,确定了抓取搬运机械手的取料搬运工序跟弯管工序和退火工序之间的衔接,对抓取搬运机械手的三个主要运动方向上的运动部件进行了纵向机构、横移模组、抓取搬运机械手组件及电气保护装置等方案设计.根据该公司的生产需求,考虑到在每次更换不同规格时需要在操作台上详细输入初始参数,最终确定生产节拍为 55s,即对一根 U 型钢管完成一整个抓取搬运的过程为 55s,通过三个运动方向的运动实现了一套自动抓取的机械手.
(2)对抓取搬运机械手所需的电机、电缸、横移模组等标准设备进行了计算和选型.
(3)对齿轮传动、电机调整装置、车轮组、弹簧夹紧摆杆装置、异型铝车架等主要结构进行了结构设计和三维建模.最后,通过 Creo3.0 软件将设计出的各三维零部件模型按照实际装配过程在软件中进行虚拟的装配,创建了整个 U 型刚管抓取搬运机械手的三维模型.
(4)运用 ANSYS Workbench 软件对抓取搬运机械手进行了不同加速度下惯性力的有限元分析,得出了有限元分析的结果和现场的调试结果大致相同.不同加速下惯性力的有限元分析是对抓取搬运机械手在相同载荷的情况下,启动或者制动的瞬间加速度产生的惯性力对整个小车结构的影响,仿真发现整个抓取搬运机械手在惯性力的影响下,变形和应力最大处确实发生在整个抓取搬运机械手负载的末端,也就是机械手爪处.同时,发现在使用加速度为 300 mm/s2 的情况下,机械手爪的最大应力和最大变形位移都在材料许用范围之内,满足该公司需要的抓取节拍,符合生产工艺要求.
6.2 展望
本文在研究了原整体式取料机构后,保留了原机构的车架、导轨、齿条等结构,采用模块化设计重新设计取料机构,新设计的 U 型钢管抓取搬运机械手通过三个方向上运动组件的调整实现了不同规格的 U 型钢管的抓取.通过有限元仿真结果和现场对抓取搬运机械手进行大批量不同规格的钢管抓取搬运的调试,测试结果表明研制的 U 型刚管抓抓取搬运机械手满足设计要求.
该抓取搬运机械手正式进行生产后,大大提高了 U 型钢管生产效率.本抓取搬运机械手实现了 230mm<R≤1000mm,5000mm<L≤12000mm 的 U 型钢管自动抓取搬运 , 该 公 司 所 制 造 的 U 型 钢 管 弯 管 半 径 和 管 脚 长 度 范 围 为 200mm <R≤1200mm,3000mm<L≤14000mm,故本设备目前只是满足了该公司百分之 90 的规格的 U 型钢管,后期还需改进.本抓取搬运机械手在整个 U 型钢管生产线中起取料工序的作用,完美的衔接了弯管工序和退货工序,增加了整个 U 型钢管生产线的自动化程度.抓取搬运机械手最终将 U 型钢管放置在放置操作台上,后期会开发出钢管放置过后,通过跟抓取搬运机械手配套的移栽机构将 U 型钢管运输到退火操作台上,完成整个 U 型钢管自动化生产线.这种整条生产线全部实现自动化符合了当代工业制造和发展的趋势.符合了工业 4.0 的发展高端装配制造的特点.
致 谢
感谢学校给我们提供了优良的学习环境,实验室宽敞明亮,学校环境优美,宿舍管理有序,干净安静,同时,学校组织多次报告会,目的是拓宽我们的眼界,启发我们的思路,感谢学校悉心的培养!
感谢我的导师王全先教授,从论文选题开始,老师一直都是悉心的给我讲解知识,具体、细致和全面.在写作阶段,老师给我提供写作方向性的指导,让我能够比较全面的展开课题的内容.在涉及到一些设备的设计时,由于我知识范围不广,思维不宽阔,往往会陷入停滞不前的状态或设计的装备不合理.当老师了解到我的困惑时,会帮忙提供设计概念和讲解相关知识,让我能够尽快的完成相关设计,我由衷的感谢老师的帮助.祝老师身体健康,生活愉快!
我要感谢我的校外导师耿培涛,在马钢实习过程中,他给了我许多帮助和鼓励,并在实践和学习上给了我很多指导,使我在专业水平上得到了很大的提高.感谢任鑫,在我遇到仿真软件操作困难时,他向我提供仿真参数设置的思路,并且说明设置的原因.如果哪一思路不行,他们也会热心的和我一起分析原因,助我解决困惑.虽然他也在忙于毕业论文,但是他仍会给我提供指导,这种奉献精神深深的感动着我,另外,还要感谢室友张福林;同研室的梅振、龚小俊、张濛、候锦涛、汪韬、曾详跃等,感谢你们在精神上对我的鼓励,以及在论文写作中对我的帮助.
最后感谢家人的支持.在我读研期间,我精力比较有限,正赶上家里事情比较繁杂的时候,家人都一一处理好了,在生活上让我无忧,让我能够安心的学习,感谢他们的体谅和理解,并且在我写论文期间遇到困难,家人都会尽量的帮忙寻找资料,提供一些解决思路和方法.同时向关心和帮助我的同学、朋友,向参与本文审阅、答辩的专家教授表示诚挚的谢意!
参考文献
[1]贾晓敏. 基于视觉信息的工业机器人搬运技术研究[D];[硕士].河南:河南科技大学,2013.
[2]王会永,邢力,李向男,王彬,李浩天.工业机器人的应用现状及发展分析[J].机电技术,2018(06):115-117.
[3]黄贤新.工业机器人机械手设计[J].装备制造技术,2012(03):220-221.
[4]徐秋花,鲍剑斌,濮小靳,刘志江.U 型管自动上料系统及方法:中国,201310104947.2[P].2013-06-19.
[5]Bugday M, Karali M. Design optimization of industrial robot arm to minimizeredundant weight[J]. Engineering Science and Technology, an International Journal,2019, 22(1): 346-352.
[6]王峰.浅谈大型换热器的技术进展[J].科技经济市场,2015(06):7-8.
[7]Pedrocchi N, Villagrossi E, Cenati C, et al. Design of fuzzy logic controller ofindustrial robot for roughing the uppers of fashion shoes[J]. The International Journalof Advanced Manufacturing Technology, 2015, 77(5-8): 939-953.
[8]王超,周好斌.钢管收集料框缓冲装置精确定位的应用[J].科技与创新,2016(9):108-109.
[9]布莱恩·邦特兹,孟昭青.迈向工业 4.0 和智能工厂[J].上海质量,2017(12):54-56.
[10]W Doggett. Robotic assembly of truss structures for space systems and future researchplans[J].Aerospace Conference,2002(7):1-10.
[11]MD Rhodes, CC Quach, RW Will. Verification tests of automated robotic assembly ofspace truss structures[J].Journal of Spacecraft & Rockets,1995,32(4):686-696.
[12]胡正义.桁架片搬运机械手优化设计及计算机仿真[D]:[硕士].武汉:武汉理工大学, 2006.
[13]曹家鑫.一种高速重载码垛机器人的设计研发[D]:[硕士].天津:天津大学, 2012.
[14]王彪.桁架机器人耦合特性分析与结构优化[D]:[硕士].合肥:合肥工业大学, 2017.
[15]牛康廷.桁架机器人运动学建模、定位误差分析及实验研究[D]:[硕士].合肥:合肥工业大学, 2016.
[16]佟祯,邓嘉鸣,蒋永健等.面向笔记本外壳生产线的桁架机器人的研究和应用[J].常州大学学报, 2015,27(1):11-15.
[17]亚晓丹. 桁架式机床上下料机器人分析与改进设计[D].东北大学,2014.
[18]杨宇,刘海涛,刘引弟.基于工业机器人的自动生产线组建技术研究[J].山东工业技术,2019(07):3.
[19]T Yoshikawa. Control algorithm for grasping and manipulation by multifingered robothands using virtual truss model representation of internal force[J].IEEE InternationalConference on Robotics & Automation,2000(1):369-376.
[20]周希章,周全. 如何正确选用电动机[M]. 北京:机械工业出版社,2004.
[21]胡宪委.伺服电机优化选型[J].自动化应用,2018(03):136-138.
[22]汤新舟.永磁同步电机的矢量控制系统[D].浙江大学,2005.
[23]肖潇,杨金堂,全芳成,李京等.伺服电机的选型原则与计算[J].机床与液压,2014,42(22):44-49.
[24]范力旻,刘建功,张建生.伺服刀架电机的选型研究[J].机电工程技术,2008,37(12):87-88.
[25]胡宪委.桁架机械手伺服电机选型[J].自动化应用,2018(02):135-136.
[26]周冬珍,李开明.单驱两联动直线尺度综合[J].机械制造与自动化,2017,46(03):17-20.
[27]陈熵,袁真,李旭.直标机器人的设计研究[J].现代制造技术与装备,2018(10):61-64.
[28]文晓阳.摆臂型液压机械手结构及特性分析[J].自动化应用,2019(01):105-106.
[29]黄伟玲.基于 PLC 的气动搬运机械手设计[J].煤矿机械,2009,30(10):20-21.
[30]东方马达.无刷电动机 BMU 系列 30W/60W/120W 使用说明书[S].2016.
[31]东方马达.无刷电动机 BMU 系列[S].2017.
[32]曹嘉佳.基于伺服电缸的定位控制系统设计[J].山东工业技术,2018(22):107.
[33]张君艳.基于伺服电缸驱动的 PLC 物料存储装置控制系统设计[J].机电一体化,2014(7):66-69.
[34]Bodneva,O.J. Ilegbusi,M.A. Kozhushner,K.S. Kurmangaleev,V.S. Posvyanskii,L.I.
[35]武帅.浅析传感器技术在机械电子中的应用[J].山东工业技术,2019(07):161.
[36]上海法明电气有限公司.接近开关 YB 系列[S].2018.
[37]周瑞平,李增光.夹壳联轴器改型设计研究[J].中国修船,2005(05):29-31.
[38]肖新武.夹壳式滑块联轴器的产生及特点[J].砖瓦,2009(12):35-36.
[39]涂骏鸣.夹壳联轴器的调整与维护[J].砖瓦,2008(02):48.
[40]方大千,朱征涛. 实用电动机速查速算手册[M]. 北京:化学工业出版社,2013.
[41]成大先. 机械设计手册[M]. 北京:化学工业出版社,2017.
[42]张晶亮.齿条传动系统的速度及定位控制设计[J].煤矿机电,2019,40(01):17-19.
[43]濮良贵,纪名刚. 机械设计[M]. 北京:高等教育出版社,2013.
[44]殷鸿梁,朱邦贤. 齿轮运动机构设计[M]. 上海:上海科学技术出版社. 1996.
[45]郭平均,王伟.快速调整碟形弹簧组紧的装置[J].制造技术与机床,2013(08):117+121.
[46]张玉钧.不停车弹簧夹头夹紧装置[J].机械工人.冷加工,1984(09):13.
[47]康士庭,吕建国. ANSYS Workbench14.0 有限元分析入门详解与实例[M]. 北京:人民邮电出版社,2013.
[48]周炬,苏金英. ANSYS Workbench 有限元分析实例讲解[M]. 北京:人民邮电出版社,2017.
[49]刘平安,槐创峰. 详解 ANSYS 有限元分析[M].北京:电子工业出版社,2018.
[50]亚晓丹. 桁架式机床上下料机器人分析与改进设计[D].东北大学,2014.
[51]刘超峰,张淳,张功学.基于 ANYSY 的高速加工中心主轴箱有限元分析及优化[J].组合机床与自动化加工技术,2010(07):26-28+34.
[52]李阳,汪荣顺,王彩莉.使用 ANSYS 对惯性力作用下的低温绝热气瓶进行应力分析与优化[J].低温与超导,2009,37(11):5-9.