24Сʱ���Ķ�������
24Сʱ���Ķ�������
����ժҪ
���������������������������еĹؼ�����֮һ,���������Ŀ��������ƶ����Զ������������ߵ��ռ���Ӧ��,��ͳ�������˹�����������˵ķ�ʽ�Ѿ�ԶԶ����������ʵ��Ҫ.������������������Ҫ��ߡ��������ӡ�����Σ�յ�ԭ��,Ҳ����һ��Ч�ʸߡ��ȶ��ɿ������������ߵ��������˻�е�ִ����˹�����������˹���.��Ȼ�йػ�е�ֹ��ڼ���������,�����ܲ��ȶ�,�ɿ��Բ�,�ؼ���������ʧЧ,Ӱ������,��˲�δ�õ���Χ�ռ����ƹ�,���ǶԸ��ͻ�е���Լ���Ӧ���Զ�����������ʶҲ����.������,����ͨ�û�е����������Ѹ��,��ƷҲ�õ������ռ�.����Ŀǰ�����������ר�û�е�ֵ������Խ���,�Ҷ�����Ա�ֲ�����ҵ֮��,������ʵ��ʹ��,�Ի�е�ּ�������峲�������,�����е�ṹ�����ǹؼ��������ڵ���ѧ���ܷ���Ƿȱ,Һѹ����ϵͳ���ȶ�,ȱ����Ҫ���������,���ִ���Ʒ���ʹ�ò���.
�����������������˻�е��Ϊ��島���,�Ե��͵ĸ�������Ϊ��,����˰�����ר�û�е�ֵ��Զ����������������岼�֡���е�ֵĽṹ�Լ�Һѹ����ϵͳ,����˹ؼ����IJ���ǰ���۵���ѧ�����Ľ�.
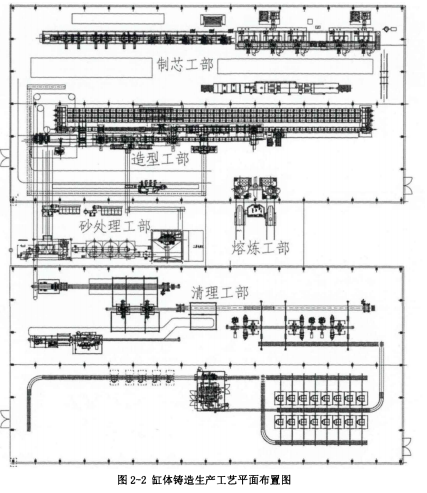
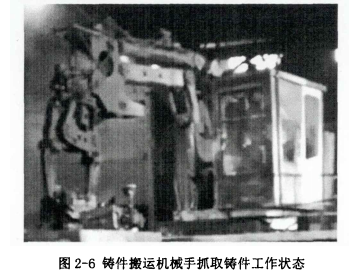
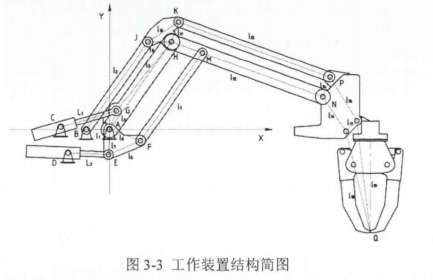
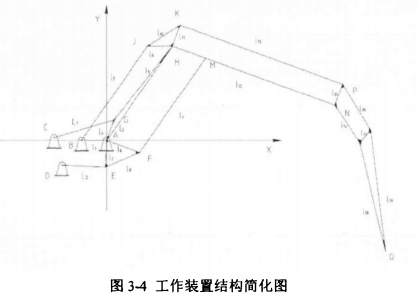
��������,����˵��͵ĸ��������������Լ���ѹ���������岼��,�����˹������̺ͽṹ���.����ʵ���������,�����˸����������˻�е�ֵ���ѹ���λ��,�������乤��ԭ��.�ó��������˻�е��ȡ���˹��DZ�Ҫ��.
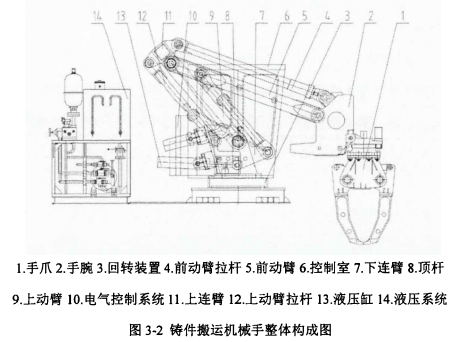
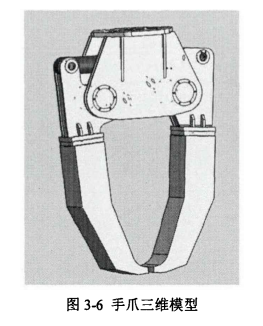
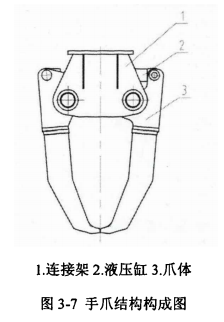
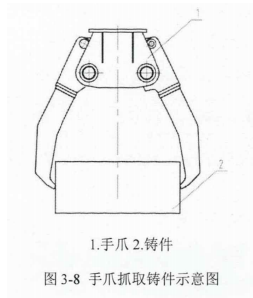
�������,�Ը����������˻�е�ֽṹ���������,�����������巽�����ṹ��ɡ�����ԭ���ͻ�������,����צ�������϶��ۡ���תװ�á�ǰ���۵���Ҫ������������Ƽ���.��Թغ���е�ֵ��������ܺ�ʹ�������ĵ��ؼ�����ǰ�����������ƺͼ���,���������ǿ��У��.���ݳ������׳��ֵ�ʧЧ����,������ԵظĽ�Ӧ�����д��Ľṹ.
����Ȼ��,ѡȡǰ�����ھ��������λ�õĵ�����,��������Ԫ����,�����ִ�������Ʒ���,�ԸĽ�ǰ���ǰ���۷����˾���̬����.����SolidWorks�����ά��ģ,����SolidWorksSimulation����Ԫ��ģ,ͬʱ�������.ͨ���նȡ�ǿ�ȷ������,����ǰ���۽ṹ���㾲ǿ�����Ҫ��,�ҸĽ����ǰ����������� von Mises Ӧ����С26.1%,����λ�Ƽ�С31.1%,�Ľ�Ч������.���ģ̬��г��Ӧ����,���� Direct Sparse ��������ǰ6�Ĺ���Ƶ�ʲ��ó�������ͼ,������֪�䶯̬����,�Ľ�������Ķ�̬����,��������ʶ��е�ֵĶ���Ƶ��.
�������,����˻�е�ֵ�Һѹ����ϵͳ,�����˹ؼ�����.��Һѹ�͵���ϵͳ��������Ʒ���,�����˻�����ɺ�ԭ��,�ص������Һѹ�ŷ�����ϵͳ.����ȷ�ļ���,�ܹ���֤��е�ֵ��ȶ�����.
�����ؼ���:�������˻�е��,ǰ����,����Ԫ����,Һѹ����
����Abstract
����Casting carrying is one of the key processes in the foundry production process.The rapid increase of casting production promotes the popularization and applicationof automatic casting production line. the traditional method of casting handling byhand is far from satisfying the practical needs. Due to the heavy casting weight, highquality requirements, adverse environment, existing risks and other reasons, there isan urgent need for an efficient, stable and reliable casting handling manipulator withhigh quality to replace manual casting handling. Although the manipulator has beendeveloped for many years in China, its performance is not stable. its reliability ispoor, and the key parts are easy to fail, which affects the production. Therefore, ithas not been widely popularized and popularized, and people's understanding of themanipulator and the corresponding automatic production line is insufficient. Inrecent years, the performance of domestic general manipulator has been improvedrapidly, and the products have been widely used. But the current domestic study ofthe special manipulator is relatively few, and most of the researchers are in companies. They focus on practical use. They do not have in-depth research onmanipulator technology, and lack of analysis on its mechanical structure, especiallythe internal mechanical properties of key components. They lack the necessarytheoretical design and the use of modern design methods. The hydraulic controlsystem is unstable.
����This paper takes a certain type of casting handling manipulator as the researchobject, takes a typical cylinder casting as an example. It designs the general layoutof the automatic casting production line including the special manipulator. thestructure of the manipulator and the hydraulic control system. And it completes themechanical analysis and improvement of the key forearm. .
����Firstly, it designs the general layout of the typical cylinder casting production line and the static molding line. and introduces the process flow and structurecomposition. According to the actual production situation, the optimal workingposition of cylinder casting handling manipulator is arranged, and its workingprinciple is introduced. So it is concluded that the casting handling manipulatorreplace artificial is necessary.
����Secondly, it designs the structure of cylinder block casting carrying manipulator,and introduces its overall scheme, structure composition, working principle andbasic parameters, design and calculation on main hand claw. wrist, arm, movablearm before turning device. It designs and calculates the forearm, which is a typicalkey component related to the overall performance and service life of the manipulator.The strength of it is checked. According to the common and easy failure types, thestructure at the stress concentration is improved.
����Then, when the forearm is lifted to the highest position in typical conditions,according to the finite element analysis theory and modern simulation designmethod, the static and dynamic characteristics of the forearm before and after theimprovement are analyzed. SolidWorks is used to complete 3d model of the forearm,and SolidWorks Simulation is used to establish the finite element model andcomplete mesh pision. The results of stiffiness and strength simulation show thatthe forearm structure met the requirements of static strength design. and that themax imum von Mises stress and maximum combined displacement of the modifiedforearm decreased by 26. 1% and 31.1%, indicating obvious improvement effect. After completing modal and harmonic response analysis, Direct Sparse solver wasused to obtain the first 6 order natural frequency of the structure and draw thecorresponding vibration pattern cloud graph, so as to deeply understand its dynamiccharacteristics and improve the dynamic characteristics after improving, which is helpful to understand the dynamic frequency of the manipulator.
����Finally, the hydraulic control system of the manipulator is designed and the keydata is obtained. This paper analyzes and designs the hydraulic system and electrical system, discusses the basic composition and principle, and mainly introduces thehydraulic servo control system. Through accurate theoretical calculation, it canensure the stable operation of the manipulator.
����Key words: casting carrying manipulator, forearm, finite element analysis,hydraulic control
����Ŀ¼
����Ŀ¼············································································I
����CONTENTS············································································V
����ժҪ············································································I
����Abstract············································································III
������1������············································································1
����1.1�����о��ı���������·····································································1
����1.2�������е�ֵķ�չ�ſ�····································································5
����1.2.1�����е�ַ�չ���·····································································5
����1.2.2���ڻ�е�ַ�չ���·····································································6
����1.3���ڵ�����·········································································7
����1.4�������Ҫ�о�����······································································8
������2�¸������������߹��ղ������································································11
����2.1�������������߹������̼�����································································11
����2.2���������ղ������····································································14
����2.2.1����������·······································································14
����2.2.2���õ�����������····································································14
����2.2.3��ѹ�����߹��ղ������··································································17
����2.3����С��··········································································21
������3�� �������˻�е�ֵĽṹ���·································································23
����3.1�������˻�е�ֵ�����ṹ··································································23
����3.2�������˻�е�ֵĹ���ԭ��··································································25
����3.3��צ����Ʒ���·······································································27
����3.4�������Ʒ���·······································································30
����3.5�϶��۵���Ʒ���······································································31
����3.6��תװ�õ���Ʒ���·····································································32
����3.7ǰ���۵���Ʒ���······································································34
����3.7.1ǰ���۵���������·····································································34
����3.7.2ǰ���۵����·······································································37
����3.7.3ǰ���۵�У��·······································································38
����3.7.4ǰ���۵�ʧЧ�ͽṹ�Ľ�···································································39
����3.8����С��··········································································40
������4��ǰ���۵ľ���̬���Է���··································································43
����4.1ǰ���۵ľ�̬���Է���····································································43
����4.1.1����Ԫ��������······································································43
����4.1.2ǰ���۵�����Ԫ��ģ····································································47
����4.1.3ǰ���۵�ǿ����նȷ���··································································51
����4.2ǰ���۵Ķ���ѧ����·····································································55
����4.2.1����ѧ�����Ļ�������···································································55
����4.2.2ǰ���۵�ģ̬����·····································································57
����4.2.3ǰ���۵�г��Ӧ����····································································61
����4.3����С��··········································································64
������5���������˻�е�ֵ�Һѹ����ϵͳ���·····························································67
����5.1Һѹϵͳԭ�������·····································································67
����5.1.1Һѹԭ�����······································································67
����5.1.2Һѹϵͳ���·······································································67
����5.2Һѹϵͳ���········································································69
����5.2.1��Ҫ��������·······································································69
����5.2.2Һѹϵͳ��Ƽ���·····································································69
����5.3����ϵͳ���········································································72
����5.3.1����ϵͳ��ɺ�ԭ��····································································72
����5.3.2Һѹ�ŷ�����ϵͳ·····································································72
����5.4����С��··········································································76
������6�½�����չ��········································································79
����6.1����···········································································79
����6.2չ��············································································80
�����ο�����············································································83
������л············································································89
������1�� ����
����1.1�����о��ı���������
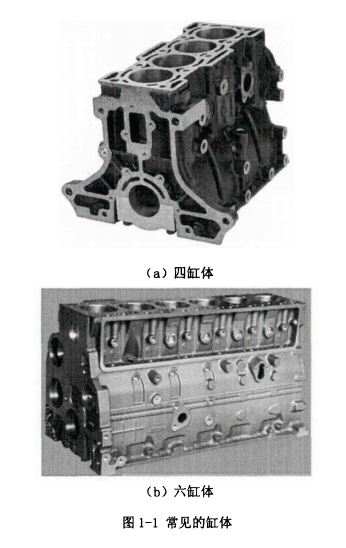
���������������������������еĹؼ�����֮һ,�����ڴ�ͳ�����������������ʵ͡��Զ����̶ȵ͡�����������Ҫ�ߵ�ԭ��,�����İ��˷�ʽ����Ҫ�����˹�ʹ�õ�������ɰ��������λȡ�źͰ�������.��������ʱ���Ľ���,�Ը�������������������,ѡȡ���͵ġ���ߴ����Եĸ�������Ϊ��,��ȥ�ձ�ʹ�õ�����������ʽ���������ʵ������������.�����ĸ�����ͼ1-1��ʾ.
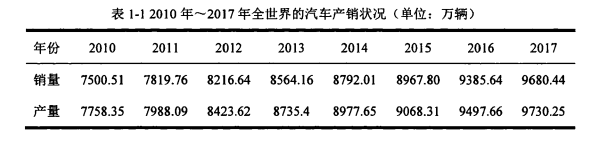
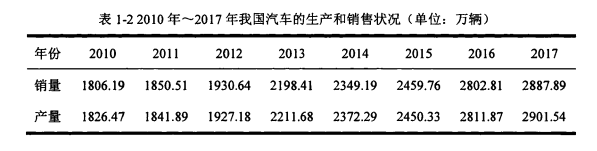
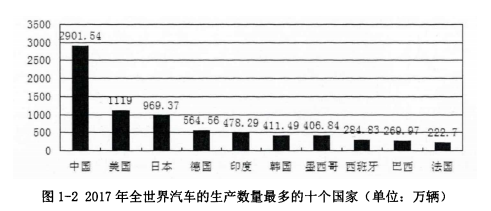
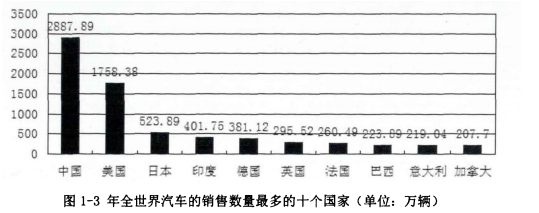
��������ҵ��������װ������Ҫ����֧�Ź�ҵ����Ļ���.������ҵ������ҵ����ؼ�����Ҫ�Ĵٽ�����,���źܴ�ijɳ��ռ�,�ƽ����Ҿ��õĽ���.�й�������ҵЭ�ᷢ����Ϣ����,2010��2017���������������������۶����ֳ�����������̬��,2017��ȫ���������������Ͳ����ֱ�ﵽ9680.44������9730.25����,���1-1��ʾ.2010��2017���й�������������ͬ�����ֳ�����������,2017ȫ�����ǹ��ҵ����ۺ������ֱ�ﵽ2887.89������2901.54����,���1-2��ʾ.2017���ҹ�������������������������������������������ȫ��ǰʮ�����ҵĵ�һλ,���ұȵڶ�λ�нϴ����ȳ̶�,��ͼ1-2��1-3��ʾ[1-2].
������2000������,�й�ƾ���ž�������ʱ�����Դ����,������Ʒ����������������λ�е�һ[3].
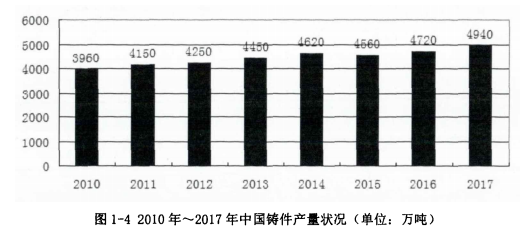
������ͳ��,2017��,ȫ��������������Լ1.1�ڶ�,����һ��������550���,���5.3%[4].Ϊ�����������������.�ҹ�2017��������ܲ���Ϊ4940���,��2016��������4.7%,�ﵽ220���,����һ�����һ��,�ӽ������һ��,��ͼ1-4[5-7].��ʾ����,�ҹ���������IJ����ﵽȫ����30.6%,�ﵽ1510���,������λ[8].
������Ϊ�������ĵķ�����,��������ԼΪ60%~80%.���еĸ�����һ�����ĵ����������,���������ڹ���������������.����������ע��ʼ����,����ٽ�����������ȹ�������.��������ɰо���Ѿ���һ����ɰ�����ɾ�,���Զ���������������Ҫ���ж�����ɰ����.Ȼ����ת�����������衢��������[9].���ݸ������������Ҫ��,��ҪӦ�úܶ����װ��.�������е�����ҹ���е��ҵ�Ļ����ͺ���,������̶����Ӱ�����ҹ�����ҵ�Ľ����̶�,Ӱ�������ķ�չ[10].
������������,�ҹ�ֻ������������������ǿ��,���ļ�����ó����Ȩ���з����µȻ��Ƚ����.����"ʮ����"ʱ������,���š��й�����2025���͡�������ҵ"ʮ����"��չ�滮����һϵ�����ߵ���̷������ƶ���ʵ.����������Ŀ��ٷ�չ�ͳ���Ͷ��,�ҹ������������豸����Ҫ����,�����Ǻ��ĸ߶��Զ�������װ����ѹ�����ߵĹ���������Χ�ƹ�ʹ��,ʹ��������ҵ�ļ���ˮƽ������Ч���Լ��������������˼�������,��ӵ�����ͼ����������Է�ӳ�ҹ���е����ķ�չ�̶�.
�������ż����ķ�չ��װ����������Ч�ʵ������Լ��������ƷƷ�����������,��ͳ���˹�������������ԶԶ���㲻��ʵ����������Ҫ.ͬʱ,�˹�������ʹ�˴��ڶ��ӵĹ���������,�кܸߵ��Ͷ�ǿ��,���Ҵ��ڽϴ�İ�ȫ����.һ�������������ɰʱ���¶ȶ��ܸ�,�Ҹ���������������,�˹��Ͷ�ǿ�ȴ�,���ѳ�ʱ����а�����������.������,������ɰ��λ���ܼ����Ͷ�ǿ��40~70%.Ϊ�˸��õ�ʵ�ָ����������˹���,�ﵽ��ȷ���ȶ�������ȡ��Ҫ��,��������������Ҫһ�ֿ�����ȷ,�����ȶ����ܹ����ƹ����������豸����.
�����ӹ�����������������������ҵ�������,�ܶ������ҵ�����˹���֪��������װ��,����������װ�����нϴ���[13].�����й���е������ı���,�ڶλʮ��������ؼ������Ŀ����ռ����ؼ����������ˮƽ��.ͨ��һ�㳣����ƺͼӹ�����������������˻�е��û�������Ͻ���У�˺�����,��Ʒ���ȶ�,����ʱ�䳤,�ʽ�Ͷ���.�����˽�������������˻�е�ֵ��з�����,��߹ؼ�����������Ŀɿ��Զ�����ҵ������Ʒ����ˮƽ,����г�������ʮ�ֹؼ�.ͨ�����������ؼ������Ľṹ�ص�,��ʶ�乤��״̬�µ���ѧ����,����Ӧ�����նȡ�ǿ��,�����䱡����λ�����иĽ�,������е�ֵ����������ر�ؼ�[14].
��������װ�����������˻�е�ֵĺ���,��ǰ�������ǹ���װ�õĹؼ���������,���������˻�е�ֵĵ�����ɲ���,��ṹ����������Ӱ���Ż�е�ֵĹ���Ч��������.���ڻ�е�ֵĹ������������ڳ���ʱ������̬���졢λ������������˶�״̬��ȡ�ż�λ�ö����������.ʹ�û�е�ִ������ö����ӡ��������ӡ��غɶ�������,����,Ϊ��ʹ����װ�����㸴�ӵĹ���,��Ҫ�������ȫ����о�,ʹ֮�ܹ���Ӧ���ӹ�����ģ��ʵ��.��ͨ������ʵ��ķ����ִ����ɱ��߰������ڽϳ��Ȳ���Ӱ��,���,���Խ���������漼��������,���ǰ���۵ľ���̬�����ܷ���[15].����������Ч����ǿ��Ƶĺ�����,�����������,���ͳɱ�,���ڲ�Ʒ���������ش�����[16-22].
����1.2�������е�ֵķ�չ�ſ�
�������Ź�ҵ�Զ����ķ�չ,��е����һȫ��װ��Ӧ�˶���,���Է����˵��ֱ��˶�,���ݹ̶��IJ����÷š��ƶ�����λ���Լ����Ʋ�������.��Ϊ����ʮ����������һ�ּ���װ��,������Ĺ�ҵ������,����ͻ���������Ժ���Ӧ��,���ɰ����˹���ɼ��Ĺ���,�����Զ���ɱ�������ڶ��ӻ����µ�Σ��,���������¶Ƚϸߡ��۳��϶ࡢΣ��ϵ���ϴ�Ĺ����ռ��Լ��ڿ����ζ���Ͷ�ǿ�Ⱥܴ����б�������,����鼰��е��ұ���Լ�ԭ���ܵ��ڶ�����.
����1.2.1�����е�ַ�չ���
������սʱ��ʼ���ֹ�ҵ����ʹ�õIJ�����е��,������,�����͵�ң�ػ�е�ֿ�ʼӦ�����ƶ��˲��ϵĹ�����.����1958��,�������Ϲ�˾��������ʾ����.�ٵ�1962��ʱ,ͨ�����ϸĽ�,����˻�е�ֵĴ������,����Ϊunimateͨ��Һѹϵͳʵ����ת���ڶ��ȶ��ֶ���,�������ݵĽ���Ϊ�Ź�.�ڴ˻���������������ʽ�Ļ�е�ֿ�ʼ����.ͬΪ1962��,����һ�ҹ�˾�������һ���ܽ��е�켣���ƵĻ�е��,��ΪVersatran.Ϊ����Ļ�е�ֵĽ����������õ��̵�.����60�������,���Ẹ�ӵȸ��ֻ�е�־��õ����ٷ�չ.1978��,������Unimate��˾��Stanford��MIT���������˾��п���ϵͳ��Unimation-Vic.armװ���е��,���ƾ��ȵ���lmm.1970��,�¹���ʼʹ�û�е����ɰ��ˡ��纸�ȹ���,һ����ҵKUKA������һ��ؽ��͵��ܹ��Զ����Ƶĺ��ӻ�е��.1969�꿪ʼ,�ձ�ͨ��������е��,�����з�����,ʹ�ñ����Ļ�е����ҵ�õ�Ѹ�ٳɳ�,���ڻ�е�ֵ�ʹ�����������������.����60���,ǰ����Ҳʹ�û�е�ִ�����ɷ������ظ��Ըߡ�Σ�յĹ���.
��������������ҵ���������˻�е��,�ձ���ʿ��������1982��ɹ������������ܹ�����̨�������ȡ���Ļ�е��,�����غ�Ϊ10����[41].����¹�AST��˾��1986����ʽչ���̶�ʽ���ƶ�ʽ���ֻ�����ʽ�Ļ�е��,����غ�1��,���Խ����ֶ��Ͱ��Զ�����,������ʾ�̹���.������,��Ϊ���ڽ��ڽ϶�Ļ�е�ֳ���,Ӣ��Clansman��˾�͵¹�Andromat��˾�DZ�����Ĵ���,���г���ļ����������IJ�Ʒϵ��.Ӣ��Clansman��˾��1995��ɹ��з�����һ̨�������˻�е�ֲ����ձ�Ͷ����Ӫ,����ȫҺѹ������ʽ,Ŀǰ�ù�˾��е���Ѿ߱���Ч�غ�100����-10�ֵ�ץȡ����[43].�¹�Andromat��˾��1975�꿪������һ̨�������˻�е��,����ȫҺѹ������ʽ,Ŀǰ���߱���Ч�غ�70����-2500�����ץȡ����.
����1.2.2���ڻ�е�ַ�չ���
�����й���ҵ��е�ַ�չʼ��20����70���,Ҫ������ŷԼ30��[44],�Դ�1972�����Ƴ�����̨��,�й��ͽ��뿪��Ӧ�õķ�չ��.����"����"����,��������˶Ը�����չ�Ĺ�ע��[45],�Ӵ�Ͷ���֧��,�ڸ����Ĺ�ͬŬ����,�й���峻�������ҵ�ɹ������˶��ֽṹ��ʽ���ܵĹ�ҵ������,�����ܹ�ʵ����Ϳ����,�ܽ��ж��ֺ��ӹ���,�ܹ����װж���˹��ܵȵ�.�ڿ���������,�й�����Ժ��Ҳ����˶����������з�����.ͬʱ,�ؼ�����Ҳ��������������з�����.��������ҵ,�ҹ���Ҳ����,���������ѹ��е�������1988�꿪ʼ�з������ؽ�ʽ��е��,���ɹ����Ƴ��ҹ���һ̨�������˻�е��[47],��˹��ڴ����������˻�е�ֵĿհ�,����˽���,�ر����ڷ����������ͻ���ҵ,��������˹����г�����,����ȫҺѹ����[48]����Һ�ŷ����Ƽ���,ͨ�������Ľ�,�γ��˱Ƚ�������ϵ��.
���������й����ú�ҵ�Ŀ��ٷ�չ,��е��Ҳӭ����������ı仯[50],����ȡ���µļ����ɾ�[51].��ֹ������,���ݶ������Ϳ��Ի��ֳɻ����硢Һ������;������ʵ��ʹ�õĹ����������Էֳ�ר���ͺ�ͨ����;�����乤���Ĺ켣�ֳɵ�λ�������켣�����͵�.
������������е�ֵõ������ռ����ƹ�,���Ÿ�������ʹ�õ���е��,���似��Ҫ��Ҳ��֮��ǿ.��һΪ���ߵ�����,���ٶȡ����ȡ��ȶ��ԡ�����ά�ޱ�����.���Ż������ۺ���ؼ����ķ�չ,��е�ֵ����ܻ�������,Ӧ������ͷ�ΧҲ�����ټӴ�.�ڶ�Ϊ���ģ��ʽ,����е�ֵIJ����Ϳ���ϵͳ���Ϊ���ֱ��ṹ��ģ�鵥Ԫ,����ʹ�ó��Ϻͻ����IJ�ͬ,ʵ�ֲ�ͬ�����,�ﵽ����Ҫ��.������Ƹ���ľ���רҵ���ܺͼ�����ɫ��ģ����ͨ����[57]��ר����,ͨ������,��ʵ����������ϵ�л�������ģʽ,�����˳ɱ�,������ۺ����ܺ�ʹ�÷�Χ[58].����Ϊ���ܿ���,���Զ����Ƽ����Ļ�����,������µ����ܿ��Ƽ���,���ƾ�������Ӧ���ܵĵ�������Ԫ����,����ʵ��"PLC-���װ��-Һѹִ��Ԫ��"����ɵĵ��Ϳ���ϵͳ,����ʵ��Һѹϵͳ��"���ؿ���"��"��������"�ķ�Ծ��չ,���������������.
�������,�����������˻�е����˵,�ֻ����ڵ�һ����ˮƽ,ͨ���˹����������Ӧ����,��չ��Ŀ���ص����Ż��ṹ������ȶ��ԺͿɿ��ԡ����Ʋ�Ʒϵ�С����ͳɱ�����߾���.�ڶ����ļ������ڿ���������,��е�����ô���������,ӵ���Ӿ��ʹ����Ĺ���,�����߱�����˼ά������,��Ҫ��ͨ�����ӿ��Ƽ���ʵ�־������Ҹ�֪������е�ֵķ�������.��������߱���������������,���Ӽ��������Ƶϵͳ,���ܹ�����FMS��FMCϵͳ֮��,��Ϊ���еĹؼ�����.
���������ҹ�����ҵ�������ƿ���ˮƽ�ͼӹ����������������Ƚ�������Ȼ���һ�����,������ۺ����ܻ��кܴ�������ռ�,�����ǹؼ�����������,��������Ӱ�������豸����Ч����,������������Լ�Ź����豸�ķ�չ.

����…………���ڱ���ƪ���ϳ�,��������ʡ��,��ϸȫ�ļ���ĩ����
������6�½�����չ��
����6.1����
��������������ҵ���������Ѹ�ͷ�չ,�����������ҵ�ķ�չ�����������ij�������,���ҹ�����������λ��ȫ������������һ�����λ,�γ��˾���г�,��Ϊ�����������ؼ���ɲ��ֵĸ�������ӵ���Ӵ���г��Ͳ�������,����Ϊ�����������յĹؼ�����,���������˹����˵Ĺ������������������������Ҫ���г�������.���������һ���������˻�е��,�������������е�ṹ��Һ��ϵͳ,��������ۼ���,��������͵Ĺؼ�����-ǰ������Ϊ�ص���島���,���ݳ�����ʧЧ��ʽ,����ṹ�����˸Ľ�,ͬʱ����������漼��������Ԫ���������ԸĽ�ǰ��Ľṹ�����˾���̬���Է���,����֤��Ľ���Ƶĺ����Ժ���ȷ��.Ϊ������Ʒ�Ĵ�Χʵ��Ӧ�ú����������ṩ����֧�ź����۲ο�.��������ƾ���,�ӿ��²�Ʒ����ʱ��,�Լ��ḻ�з���������һ���Ľ��ü�ֵ.��Ҫ���о����ݺͳɹ�����:
����(1)�Ե��͵ĸ������������߽�������ϸ�Ľ���,����������������̡������ص��.�����йؼ����������;�ѹ�����ս������ص������ͷ�������.���ڸ��������ṹ���ӡ�����Ҫ���,�����Ҫѡ��߶˵ľ�ѹ�����պ������豸,ͬʱ���������İ��˺ͳ���ͬ��������������Ʒ��.��˵ó��������˻�е������ѹ������������ɸ��������İ��˺ͳ�����ʽ�Ǹ���ѡ��.
����(2)�����������˵�ʵ�ʹ�������Ҫ��,����������˻�е�ֵ�������ƺͻ���������ȷ��,�����˻�е�ֵĻ�����ɺ���ԭ��.�����Ҫ�����Ľṹ��ƺͼ���,������צ�������϶��ۡ���תװ���Լ�ǰ���۵�.ѡȡ���͵Ĺؼ�����-ǰ���۽������ص��������ƸĽ�.ѡȡ���������Ĺ��������о�,����ʵ�ʹ������غɴ�С,��������ѧ���������ۼ���,�����������У��,ͨ��У��,�ó����������ѧҪ��.����,�����䳣���Ķ��Ѻ�ƣ�Ϳ��ѵ�ʧЧ��ʽ,����Ҫ��ƴ�����ɵ�ǰ���۽ṹ���иĽ�,���������������,����ƣ���Ŀ���.������ṹ�ص㡢���������ʵ�ʹ���״̬,��������˽ṹ�Ľ�,������ǰ���۵�������ѧ����.
����(3)����˵��͵Ĺؼ�����--ǰ���۵ľ���̬���Է���.����SolidWorks�����ǰ���۵����彨ģ,����SolidWorks Simulation�����������,����������Ԫ����ģ��,��������Ԫ�������ۺͶ���ѧ��������,���������Ĺ�����,����˸Ľ�ǰ���ǰ���۵ľ���̬���Խ���.ͨ���նȺ�ǿ�ȷ���,�ó��Ľ������ܵ����von MisesӦ����С26.1%,����λ�ƽ���31.1%,����������ƺ�ʹ��Ҫ��.����ģ̬��г��Ӧ����,����Direct Sparse�������ȡǰ6����Ƶ�ʺ�������ͼ,�ó��Ľ����ǰ�����ȶ��Ժ�,��̬���ܺ�.�ӷ��������Կ���,ǰ���۵Ľṹ�����Ժ���,�ܹ�ָ��ʵ�ʵ���������ƹ���.
����(4)�����Һѹ����ϵͳ�Ŀ���.�����䲻ͬ�������˶���ʽ,�����Һѹϵͳ,������Һѹ����ԭ����ϵͳ���,�����������ۼ���,Ϊʵ��ѡ���ṩ����������.������ٿط�ʽ,����˵���ϵͳ,����ϵͳ��ɺ͵���ԭ��,ͬʱ������͵�Һѹ�ŷ�����ϵͳ�����˷���,��������ԭ������,�������˹ؼ����ŷ���.Һѹ����ϵͳ���ܹ�ʵ���������˻�е�ֵ�����˶�,����ʹ��Ҫ��.
����6.2չ��
�����������˻�е�ֵ�ʵ�ʹ����Ƕ������ӵ�,������ֻ������һ������͵Ĺ���ģ�����,ͬʱ,���ڱ���ֻѡȡ�˻�е���������Ҫ������������Ƽ���,��������͵Ĺؼ�����--ǰ���۽�������ϸ�ķ�������ͽṹ�Ľ�,δ�����в�����ϸ��������,��һ��������,��Ȼ������һЩ�о�,�����д����Ĺ�����Ҫ����������峿���:
����(1)����ֻ�Ի�е���������Ҫ�������������,�����ض�����͵IJ���-ǰ���۽����˷�������Ľ����,�ڱ�����峽��۵�ǰ����,ѡȡ����Ĺ������з���,������ǰ���۸Ľ�,��������е�ֵĽṹ������������ģ��Ҳ�ǽ��������ص㷽��.
����(2)�ڱ������о��Ļ�����,��ǰ���۽��г��������о�,���������غɵĻ�е��,������δ��һ����Ҫ���о�����.
����(3)������е�ֵĺ��ӹ��շ��桢ƣ�Ϳɿ��Է���Ҳ��δ�����м�ֵ�Ŀ���,�����е�ֵĿɿ��ԡ������������ش�.
������л
���������ҵ��о���ѧϰ����,����������еõ��˺ܶ��˵İ���,���������Գ�ߵ�л��!���ȸ�л�ҵĵ�ʦ�����ǽ���,�ֽ��ڶ����ĵ�ָ��ʮ��ϸ��,���Ͻ�ѧ�Ϳ�������,�������൱��,�ֽ���ָ���˺ܶ�������ԵĸĽ�����,������������.��������,�ֽ���Ҳ�����Һܶ����,�ٴ���ʦ���Գ�ߵľ���.
��������������ڼ�,��Ҫ��л��־����ʦ,����ʦ���ĵİ���,�����Һܶཨ���ԵĽ���,���ҵ�����д�����˺ܺõ�ָ������.��Ҫ��л�ҵļ���,��л�ҵļ��˶����Ќ]�����ĵ�ĬĬ֧�ֺ���,�����������Dz���ر��ĸ�����ʹ���ܹ�������ѧҵ.ͬʱ,��Ҫ��л�����Ұ�����ָ���ĸ�λ��ʦ��ͬѧ������!
�������,��л��æ֮�вμ��Ҵ��ĸ�λר�ҡ����ں���ʦ,��л����.
�����
����[1]����.2016��~2017��ȫ�������г���չ�ع���չ��[J].������ҵ���,2017,(7):4-12.
����[2]2017���ҹ���������ͻ��2900����,�����������ȫ���һ[J].�ִ�����,2018,(1):15.
����[3]ҵ����Ѷ[J].�й�����װ���뼼��,2006,(2):72.
����[4]ȫ������������������һ2016ȫ����������ͳ��[J].���켼��,2018,39(6):1392-1394.
����[5]�Ŵ���.2015ȫ����������С������-��ModernCasting����50��ȫ�����������Ֆ�[J].����,2017,66(2):208-211.
����[6]��ƽ.2016���й�������������[J].���켼��,2017,38(7):1531-1534.
����[7]2017���й�������������ͳ��[J].���켼��,2018,39(7):1643-1644.
����[8]2017���������������[J],����,2018,(7):662-663.
����[9]���ʷ�.������ҵ��չ������������������������������[J].����,2001,(12):746-751.
����[10]����ѧ.����������������е��Ʒ������������������[J].��ҵ�ĸ������,2014,(8):143.
����[11]��Ծ��.��е�Զ���������չ�����뷢չ����Ԥ��[J].�Ƽ����µ���,2015,12(34):86-88.
����[12]������.1986�걱����������չ���Ἴ����̸����һһ�����е��[J].�й�����,1987,(4):53-55.
����[13]���ľ�.һ��������������߹����������[D].���ִ�ѧ,2014.
����[14]�˷�.SRVĦ�г�����ǿ�ȼ��������[D].[�㽭��ѧ˶ʿѧλ����].�㽭:�㽭��ѧ,2006:35-38.
����[15]����̳.��е�۹켣�滮������ѧ�о�[D].ɽ����ѧ,2017.
����[16]�λ���.ê�����ش�������϶���ѧ��ģ���䶯̬�������[D].[���пƼ���ѧ˶ʿѧλ����].�人:���пƼ���ѧ,2008:35-39.
����[17]�̷�.����ANSYS�İ���װ���ʽ���ػ����������漰ƣ�ͷ���[D].[�人������ѧ˶ʿѧλ����].�人.�人������ѧ,2008:32-39.
����[18]�յ���.б������ģ������ģ̬������������ģ̬����Ӱ���о�[D].��ɳ:���ϴ�ѧ˶ʿѧλ����,2008.
����[19]����.����ʽƽ̨Ǩ�ƹ����Ⱦ�̬�Ͷ�̬ǿ������[D].[����ѧ˶ʿѧλ����].���:����ѧ,2007:42-47.
����[20]��ï��.�������������߲㽨�������[D].[����������ѧ˶ʿѧλ����].����:����������ѧ,2008:46-47.
����[21]Awoke B U,and Nala DR.An Overview of Computer Simulation in Manufacturing[j].Indus-tri-al Engineering,1993,25(7):43-49.
����[22]��.����ʽ�����ṹ�ڳ�����������������Ԫ����[D].[������ѧԺ˶ʿѧλ����].����:������ѧԺ,2002.
����[23]����Դ.dz̸��ҵ��е��[J].����,2011,12:38-40.
����[24]���̫,�����,��ҵ������Ӧ�ù���[M].����:ұ��ҵ������,1999.18-39.
����[25]���.С��ҵ�����˵����״����ǰ��[J].�����Ṥҵ,2008,03:56-58.
����[26]������,��·ɭ,�����.С�ͻ�е�ְڱ�ƽ�⼼���о�[J].�ǿ�ʱ��,2019,(23):209-211+219.
����[27]������,�����˻���֪ʶ[M].����:��ʱ��������,1986,126-163.
����[28]����ӯ.װж����е�ֵĽṹ�Ż��о�[D].�ӱ����ϴ�ѧ,2013.
����[29]��һ����ҵ��е�ֵķ��༰Ӧ��[J].��е���˼�������,1976,(6):56-62.
����[30]��Ϊ."��Ŀ���Ŷ�ʽ"��ҵ��ƵĿ��ⱨ��-��е�ֵ����[J].�����Ķ�,2012,02:45-47.
����[31]Makoto Mizukawa. Robot Technology(RT)Trend and Standardization[c],2005 IEEE Work-shop on A dvanced Robotics and its Social Impacts, Nagoya, Japan,2005,249-253.
����[32]Niku,S.B.Introduction to Robotics:Analysis,Systems,Application[M].New Jersey:Prentice Hall,2001.
����[33]����Դ.dz̸��ҵ��е��[J].����,2011,12:38-40.
����[34]��ï��,����Ƽ,�Ź�.���ҵ�����˷�չ̬�Ʒ���[J].�����˼�����Ӧ��,2001,2:6-8.
����[35]���������˻�е���[EB].
����[36]������.�����ɶȻ�е���˶�ѧ������ѧ���������������[D].����:���ִ�ѧ,2005.
����[37]������.������ѧ[M].����:��е��ҵ������,1999.79-93.
����[38]���.���з������ؽڵĻ�����ѧϰ���Ƽ����Ź������[D].�Ϻ�:�Ϻ���ͨ��ѧ,2001.
����[39]����.��ҵ��е���о���Ӧ��[J].��������,2013,(23):167-168.
����[40]��ҵ��е�ּ����Ĺ��ⷢչ�������ǵĶԲ�[J].�繤������־,1990,(2):36.
����[41]������.��ȡ�����Ļ�е��[J].�����е,1982,(5):59.
����[42]���ٽ�,��Ԫ��,֣����.�ι�GIFA'99��������չ���ἰ�õ��ջ�[J].�����Ƽ�,2000,(3):46-50.
����[43]������,�����,����ƽ,������,����ɽ.��������������������о���Ĺ�װͨ�������[J].�ִ�����,2015,35(1):80-82.
����[44]������,������ѧ[M].����:�廪��ѧ������,2000.124-137.
����[45]����Ӣ,��Ӣ.�ҹ������˷�չ�������Ќ]����[J].�����˼�����Ӧ��,2009,(2):1-7.
����[46]��Ӣ��,�ް���.�ҹ���ҵ�����˷�չ�о�[J].��ѧ�����빤��,2012,12(12):2912-2918+3031.
����[47]���л�.�����û�е��[J].�й�����,1993,(1):52-54.
����[48]������.�ڱ���Һѹ��е�ֵĽṹ�����Է���[J].�Զ���Ӧ��,2019,(1):105-106+108.
����[49]�Ŷ��ŷ�����,������,������,���Ը�.������ʵ�û���SZS�����ŷ���е��[J].������,1987,(6):36-38.
����[50]����.���ع�ҵ�������˶���ģ������Ż����[D].ɽ����ѧ,2018.
����[51]�����,������,���.ץȡ���ϻ�е�ֵ���������[J].ʱ������,2019,(6):98-99.
����[52]Ԭ٥��,�����,�ų���,�ߺ���.�����˵�λ�����ٶȹ滮�㷨ѡ�����[J].���켼�������,2018,(12):143-149.
����[53]������,�����,���.��е�ֵĿ��Ʒ�ʽ������ϵͳ���[J].ʱ������,2019,(6):109-110.
����[54]���ε�,������.dz̸��е�ּ���Ӧ���뷢չǰ��[J].��ҵ��������,2012,31(2):79-80.
����[55JARTHURW.RUBART,���.��ҵ��е�ֵĻ�����ʽ��Ӧ��[J].���������е,1985,(2):58-64.
����[56]��ҵ��е�ֻ���֪ʶ����[J].��е���˼�������,1976,(9):57-64.
����[57]��ѩ,������,��ˬ,���ڼ�.�����е�������״����Ӧ��[J].����ҵ�Զ���,2019,41(5):85-92.
����[58]����.������ĩ�˹��߿컻װ�õ���Ƽ��Ż�[D].ɽ����ѧ,2017.
����[59]���.���ֵ����ƶ������˵���Ʒ���[D].ɽ����ѧ,2008.
����[60]����.�����迹���ƵĻ�е����/λ�ÿ��ƹؼ��������[D].ɽ����ѧ,2018.
����[61]����.dz̸��е�ֵķ�չ����[J].ʱ������,2019,(8):31-32.
����[62]�·��.����ʽ��е�ֶ���̬���Է������ṹ�Ż�[D].���ϴ�ѧ,2014.
����[63]��ͬ��.��ɰ�����쳵���в��ò������ͻ�е��[J].�����е,1978,(2):58-65.
����[64]�ݳ���,������.һ��ȫ�Զ�Һѹ��е�������ֳ��ֹ�˾��Ӧ��[J].����ұ��Ƽ�ְҵѧԺѧ��,2011,21(1).
����[65]������.dz̸��е�ֵ����͡�Ӧ�ü���չ����[J].�й�������,2018,(4):133-134.
����[66]������.dz����е�ֵ�Ӧ���뷢չ����[J].�й������Ƽ�,2012,11(10).
����[67]����ΰ,������.һ�ֻ�����ѹ�����Ļ�е�ּ���������ϵͳ�о�[J].Һѹ�������ܷ�,2019,39(5):26-32.
����[68]��,�����.���ܻ�е��Ӧ����״���ؼ������о�[J].�������Ƽ�,2019,16(4):133-134.
����[69]����.ij���ھ�����۵ľ���̬���Է���[D].��ɳ������ѧ,2013.
����[70]��Ʒ.��е�۵�����Ԫ��ģ�������Է���[D].�Ϻ����̼�����ѧ,2016.
����[71]��˳��.������������������켼������[J].�ȼӹ�����,2015,44(1):9-10+14.
����[72]������,�ܻ�.�����������������켼�������о�[J].ʱ��ũ��,2017,44(2):43-44.
����[73]�����.һ�������߹��ղ��ֵ���Ƽ���֤[J].���켼��,2013,34(12):1819-1820.
����[74]�ܴ���.�ҹ������߷�չ����[J].�����豸���,1994,(3):32-33.
����[75]������,������.���������������칤���о�[J].����,2015,64(7):694-698.
����[76]����,���Ĺ�,����ͬ.���ͻ��������칤����Ƽ���������[J].�ִ�����,2014,34(6):52-57.
����[77]������.��������������������������������ȱ�ݷ�ֹ[J].����,2014,721-725.
����[78]ۡ����.��������������������켼��[J].��ȼ�������,2018,(3):128-129.
����[79]Ӧ����.�������������쳵�似������[J].�ִ�����,2002,(3):42-46.
����[80]������,�ܻ�.�����������������켼���������[J].ʱ��ũ��,2017,44��:43-44.
����[81]����ƽ,����ǿ,���ػ�.��ѹ�����������켰Ӧ��[J].�й�����װ���뼼��,2007,(2):59-60.
����[82]���Ļ�.�����ߵĹ���ѡ����ʵʩһ��Ҫ�ۺϿ���[J].�����ӹ�(�ȼӹ�),2014,(23):7-9.
����[83]Dongmok Kim,Jongwon Kim,K you hee Lee,Cheolgyu Park,Jinsuk Song,Deuksoo Kang,Ex-cavatortele-opera tion system using a human arm Journal of Automation in Construction,2009:173-182.
����[84]�Ͼ�ѧ.Һѹ�ھ������װ�õ�ƣ�Ϳɿ������[D].ɽ����ѧ,2016.
����[85]���ı�,�Ʊ�,���廪,�ؼ���.Һѹ�ھ������װ���ۺ��Ż��о�[J].��е����,2009,33(4):1-4+134.
����[86]�½�,����.Һѹ�ھ�����۽ṹ���Ż����[J].���̻�е,2008,7(39):19-21.
����[87]�����.��е�ṹ����Ԫ����.����:�й���ҵ������,1990.
����[88]�Ծ���.�ھ����������Ԫ�������Ż����[D].�人:���пƼ���ѧ˶ʿѧλ����,2007.
����[89]R.D.Blevins.Formulas for Natural Frequency and Mode Shape[M].Van Nostrand Reinhold.Co.New York.NY.1979.
����[90]���ó�,����.����Ԫ������ԭ������ֵ����.����:�廪��ѧ������,1997.
����[91]���ƻ�,л����.�ṹ�����е�����Ԫ������Ӧ��.����:������ѧ������,2000.
����[92]���.����Ԫ�����������������е�Ӧ��.����:�����ѧ������1989.
����[93]���ó�,����.����Ԫ������ԭ������ֵ����[M].����:�廪��ѧ������.1997��3��.
����[94]R.D.���.����Ԫ�����ĸ����Ӧ��.����:������ͨ��ѧ������,2007.
����[95]������,ղ����.�����Խṹ����Ԫ����.����:�����ѧ������,1990.
����[96Daniel Dopico,Alberto Luaces Manuel Gonzalez.ASoil Model For AHydraulic Simulator Excavator BasedOnReal-time Multibody Dynamics.Journal of Asian Conference on Multibody Dy-namics.2010:23-26.
����[97]Haftka R.T. and Adelman R.H. Sensitivity analysis of discrete structural systems.AIAAJ.,1986,24:823-832.
����[98]T.D.Moore,Failure analysis and stress simulation in small multichip BGAS[J].IEEETrans.Adv.Package,2001,Vol24.
����[99]Biao Liu,Mingxiang Wang,Tim Fai Lam.Finite element stress analysis of an multi-chippac-kage by taguchi design of experiments for package component thicknesses[J].Solid-State and Int-egrated Circuits Technology,2004.Proceedings.7th International Conference on.2004,(1):611-614.
����[100]������,������.���ػ����۽ṹ����Ԫģ̬����[J].ũҵ��еѧ��.2006,3.
����[101]�������Ϲ���ѧԺsimulation����Ԫ������ģָ��CAD/CAM������ҵ��Ϣ��2013,(4).
����[102]����?Simulation����Ԫ������ģָ��[J].CAD/CAM������ҵ��Ϣ��,2013,(4):67-70.
����[103]��С��.�ھ�����ھ����������ṹģ̬����[D].�Ϻ�:�Ϻ���ͨ��ѧ˶ʿ����.
����[104]���ƻ�,л����.�ṹ�����е�����Ԫ������Ӧ��[M],����:������ѧ������.2000��12��.
����[105]����.������ѧ����������Ԫ��[M],����:�ν�ҵ������.1983��6��.
����[106]�·��.����ʽ��е�ֶ���̬���Է������ṹ�Ż�[D].���ϴ�ѧ,2014.
����[107]���л�,����,��ΰ.����UG��ANSYS���ĸ���������Ԫģ̬����[J].��е�������Զ���,2009,(4):17-19.
����[108]������,��,�ι���.����ANSYS��485Q�����˶�̬���Է���[J].��е����,2011,35(8):81-84.
����[109]��÷.����������ϵ����ѧ�����붯̬�����Ż�[D].�Ϻ���ͨ��ѧ,2009.
����[110]Rosen Mttrev,Radoslav Gruychev,Petr Pobegailo.CAD/CAE Investigation of ALarge Hydr-aulic Mining Excavator.Joumal of machine design,2011:17-22.
����[111]���.����Ԫ�����������������е�Ӧ��[M].����:�����ѧ������.1989��1��.
����[112]Eugeniusz Budny.Loadһindependent control of a hydrauli cexcavator[J].Automation in C-onstruction,2003,12(3):245-254.
����[113]������.��ҵ��е�ֵ��Զ�������ϵͳ���[J].��Ϣͨ��,2019,(1):103-105,
����[114]�ƽ��,����Ȼ,����ǫ.����¯�����ϻ�е���˶�ѧ�����������Ż�[J].����������ѧѧ��(��Ȼ��ѧ��),2019,41(1):100-106.