24小时论文定制热线
24小时论文定制热线
摘要
在传统的轻工业、农业和食品行业,以及新兴电商业的配货、包装流程中,由于被抓物体尺寸变化大加之形状复杂(物形影响)、软硬酥脆(物性影响),因此物体的搬运大都是由人力来完成,迫切需要一种通用性好的机械手来满足这些场景的物体抓取需求。本文在国内外欠驱动机械手的研究基础上提出了一种电-气复合驱动的新型柔性欠驱动机械手,该机械手拥有更好的尺寸、形状的适应性及更高的操作效率。 在传统的轻工业、农业和食品行业,以及新兴电商业的配货、包装流程中,由于被抓物体尺寸变化大加之形状复杂(物形影响)、软硬酥脆(物性影响),因此物体的搬运大都是由人力来完成,迫切需要一种通用性好的机械手来满足这些场景的物体抓取需求。本文在国内外欠驱动机械手的研究基础上提出了一种电-气复合驱动的新型柔性欠驱动机械手,该机械手拥有更好的尺寸、形状的适应性及更高的操作效率。
本文首先介绍了机械手的原理分析与结构设计,机械手由可变手掌和三个刚柔耦合骨架手指组成。可变手掌结构能够实现两组手指指根沿垂直轴分别正反向最大转位 60 度的无级的角度转位,可以满足圆柱体、长方体与椭圆柱等形状的适应性抓取;还通过闭环步进电机驱动连杆机构,实现了三个手指指根沿水平轴90 度的精确转动,既能够满足对物体尺寸变化的适应性、又能够以此调节接触力的方向与大小。刚柔耦合骨架手指为串联铰链骨架 APA 型欠驱动手指,笔形内导向气缸从指根节直接驱动指尖节,同时克服串联铰链芯轴上大、小扭弹簧的阻力,实现捏取和包络抓取的功能,采用气动驱动的手指兼具结构柔性、驱动柔性等特性,既能够简化传动链、又提高夹紧高效率。
同时为了研究机械手的抓取性能,对刚柔耦合骨架手指进行了运动学分析,通过 D-H 矩阵的方法来表达机械手上各个点的实时坐标。并且对机械手三个手指分别以均布状态抓取圆柱体、对抓状态抓取长方体与中间状态抓取椭圆柱这三种种工作状态进行了静力学分析。分析结果表明了机械手在满足对物体形状尺寸的基础上,还可以实现对接触力的大小和位置进行精确的控制。
随后以抓取常见最大直径的饮料罐时手指驱动气缸压力最小为优化目标,使用了 Fmincon 函数优化了机械手手指的安装中心距及大小扭弹簧的胡克系数与预紧角。详细的探讨了指根节转动角度与被抓物体尺寸变化对接触力、接触点高度的影响,并且在 ADAMS 软件中建立了机械手的虚拟样机模型,分别针对圆柱体、长方体和椭圆柱抓取对象进行静力学仿真,得出手指与物体间的接触力的变化状况,理论计算值与仿真结果误差仅为 1~2%,该结论验证了数学模型、计算公式的正确性,并讨论了误差出现的原因。
完成机械手结构设计后,为满足对接触力控制要求,设计了基于气动高速开关阀压力精确控制的手指驱动回路,并设计了基于 PLC 的机械手的控制系统。
编写了相应的控制程序来实现步进电机的转角与手指驱动气缸推力的协调控制,并以触摸屏为显示与输入模块,手动输入计算的控制参数就可以实现对各种不同物体的可靠抓取。
最后制作了机械手的实物样机及控制系统,通过实物测试验证了手指驱动气缸压强的精确控制效果,并完成了机械手的抓取自适应实验,验证了机械手可以对尺寸变化大与形状复杂的物体实现可靠抓取。
关键词:变掌机械手;刚柔耦合骨架手指;电-气复合驱动;接触力分析;结构优化

Abstract
In the traditional light industry, agriculture and food industries, as well as the distribution and packaging processes of emerging electricity businesses, due to the large size change, complex shape (object shape effect) and soft and hard crisp (physical property effect) of the captured objects, the handling of the objects is mostly done by manpower, and a universal manipulator is urgently needed to meet the object grabbing requirements in these scenes. Based on the research of underactuated manipulators at home and abroad, this paper proposes a new type of flexible underactuated manipulator driven by electricity and gas. The manipulator has better adaptability of size and shape and higher operating efficiency.
This paper first introduces the principle analysis and structural design of the manipulator, which consists of a variable palm and three rigid-flexible coupling skeleton fingers. The variable palm structure can realize stepless angular indexing of the finger roots of two groups of fingers with maximum indexing of 60 degrees in the forward and reverse directions along the vertical axis respectively, and can meet the adaptive grabbing of the shapes of a cylinder, a cuboid, an elliptic cylinder and the like; The closed-loop stepping motor drives the connecting rod mechanism to realize the 90-degree accurate rotation of the three finger roots along the horizontal axis, thereby not only meeting the adaptability to the size change of the object, but also adjusting the direction and size of the contact force. Rigid-flexible coupling skeleton fingers are series hinge skeleton APA type underactuated fingers. The pen-shaped inner guide cylinder directly drives the fingertip joint from the finger root joint. At the same time, it overcomes the resistance of large and small torsion springs on the series hinge mandrel and realizes the functions of pinching and enveloping grabbing. The fingers driven by pneumatic have the characteristics of structural flexibility, driving flexibility and the like, which can simplify the transmission chain and improve the clamping efficiency.
At the same time, in order to study the grasping performance of the manipulator, the kinematics analysis of rigid-flexible coupling skeleton fingers is carried out, and the real-time coordinates of each point on the manipulator are expressed by D-H matrix method. In addition, static analysis is carried out on the three working states of the manipulator, i.e. the three fingers grabbing the cylinder in a uniform state, grabbing the cuboid in a grabbing state and grabbing the elliptic cylinder in an intermediate state. The analysis results show that the manipulator can accurately control the size and position of contact force on the basis of satisfying the shape and size of the object.
Then, the Fmincon function is used to optimize the installation center distance of the manipulator fingers, Hooke's coefficient and pretightening angle of large and small torsion springs, taking the minimum pressure of the finger driving cylinder as the optimization objective when grasping the common beverage cans with the largest diameter. The influence of the rotation angle of the finger root joint and the size change of the object to be grasped on the contact force and the height of the contact point is discussed in detail. The virtual prototype model of the manipulator is established in ADAMS software. Static simulation is carried out on the objects to be grasped by cylinder, cuboid and elliptic cylinder respectively. The change of the contact force between the finger and the object is obtained. The error between the theoretical calculation value and the simulation result is only 1~2%. The conclusion verifies the correctness of the mathematical model and the calculation formula, and discusses the causes of the error.
After the structural design of the manipulator is completed, in order to meet the requirements of contact force control, a finger drive circuit based on precise control of pneumatic high-speed on-off valve pressure is designed, and a manipulator control system based on PLC is designed. The corresponding control program is written to realize the coordinated control of the rotation angle of the stepping motor and the thrust of the finger-driven cylinder. The touch screen is used as the display and input module, and the reliable grasping of various different objects can be realized by manually inputting the calculated control parameters.
hysical tests, the precise control effect of the pressure of the finger-driven cylinder is verified, and the grasping adaptive experiment of the manipulator is completed. It is verified that the manipulator can reliably grasp objects with large size changes and complex shapes.
Key words: Variable palm manipulator; Rigid-flexible coupling skeleton fingers; Electric-pneumatic compound drive; Contact force analysis; Structural optimization.
目录
第一章 绪论
美国机器人协会对机器人的定义:自动执行工作、可以运行预先编写的程序或者接受人类指挥的自动执行装置[1].工业机器人是集机械、电子及自动化控制等多学科于一体的复杂装置,具有适用性强、可靠性高等特点。工业机器人用来代替人类执行危险性大、劳动强度高或者工作环境差的工作或任务。在 2016 年我国的工业机器人的销量为 8.7 万台,预测到 2020 年我国的工业机器人的销量将会到达 21 万台,2017 年到 2020 年工业机器人的销量增速为 22%[2].现在工业机器人主要以焊接、搬运工作为主,集中运用于汽车、电子行业[3],但在其他行业中机器人的应用程度还是较低。
1.1 课题背景及意义
中国自古以来就是农业大国,农副产品的多样性、生产加工过程的复杂性使现有的工业机器人很难适用于农业[4-5].需要耗费大量的人力、物力来进行瓜果蔬菜的采摘、分选和收储工作。这些工作劳动强度大、工作环境差、工作的重复度高,需要使用工业机器人来替代人力。
食品是人们生活中必不可少的一部分,在食品行业中为了避免工作人员对食品原材料、食品加工半成品、食品成品的污染,工作人员需进行消毒、杀菌等步骤并穿着制服并佩戴口罩和手套才能进行操作。食品行业每年需要耗费大量的一次性的手套、口罩。但食品行业中待抓取物体物性多样、形状尺寸变化范围大的特点,因此现有的机械手无法满足食品行业中产品的抓持需求。
近年来电子商务行业的快速发展也改变了人们的生活方式,电子商务行业给人们的生活带来了巨大的便利。其主要流程分为:配货、仓储、包装以及配送等流程。配货流程:用户在网上下达了订单,工作人员根据订单到电商储存仓库中取出对应的货物;仓储流程:工作人员将待存储的货物贴上可识别的标签并登记入数据库;包装流程:工作人员将取出的货物、商品的发票与缓冲件一起装到瓦楞纸箱中。配送流程:工作人员将包装好的货物送至购买者的手中的流程。由于被抓物体的多样性,配货与包装这两个流程很难依靠现有的机械手来操作。
应用于轻工业、食品行业及农业等的工业机械手的抓取对象不仅仅是形状、尺寸一致的刚性物体。传统的简易加持器已经无法满足抓取尺寸及形状变化大、材质物性变化大、摆放位置混乱的被抓物体的抓取需求。多指的仿人灵巧手不但可以灵活、精确的抓取各种复杂的被抓物体,还可以对物体进行操作。但多指仿人灵巧手价格昂贵,需要在灵巧手上安装了大量的传感器,并且灵巧手的控制系统比较复杂。灵巧手难以应用于复杂的工作环境中,灵巧手的使用及维护成本较高。为了解决这些场景中的复杂待抓取对象的抓取问题,需要设计一种新型的通用型机械手。
1.2 欠驱动机械手国内外研究现状
欠驱动机械手只需较少的驱动元件就可以实现对多个自由度进行可靠的控制,因此具有很高的研究意义。欠驱动机械手结构主要分为手掌结构与手指结构,手掌结构的功能主要是提供手指、驱动源与传动机构的安装位置,可变的机械手手掌结构可以扩大机械手的抓取范围[6].机械手手指与物体接触并可靠的抓取物体,机械手的操作灵巧程度受到机械手的手指结构影响,与刚性机械手相比,柔性手指具有质量轻、体积小和反应速度快等优点。
1.2.1 可变手掌机械手研究现状
可变手掌机械手具有结构简单、性价比高等优点,有很高的实用价值。通过使用齿轮机构、槽轮机构、空间连杆机构等都可以使机械手手掌具有独立自由度。
将变掌机械手按照手掌构型变化的形式划分,可以分为机械手动手指变位与动手指转位,手指转位又可分为动手指相对手掌中心转位与动手指相对手掌中心偏心转位两种方式。

如图 1-1 所示,在 2005 年日本广岛大学和东京大学联合研发了一种手掌采用双回转机构的新型机械手[7],该机械手的手掌具有两个自由度。机械手的四个手指分为两组,分别为内圈手指和外圈手指。内圈手指与外圈手指可以分别绕手掌中心转动。每个手指具有两个自由度,通过外圈手指和外圈手指的配合操作,仅需一个机械手可以完成拧开瓶盖的操作。但无法精确的控制机械手手指与物体间的接触力。
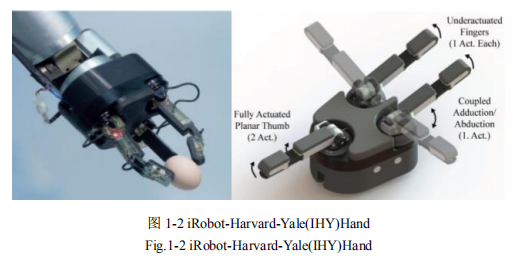
如 图 1-2 所示, 在 2014 年 美 国哈 佛 大学 和 耶 鲁 大 学 联 合 研 发 了iRobot-Harvard-Yale(IHY)Hand[8],该机械手共有三个手指,其中定手指是全驱动设计(2 个驱动器分别驱动两个关节),两个动手指则是欠驱动手指。并且机械手的手掌还具有一个自由度,因此该机械手可以抓取圆形或者方形物体。

Festo 公司提出了一种新型的气动可变掌机械手--Multi choice Gripper[9],如图 1-3、1-4 所示,该机械手有两种快换的手指结构,图 1-3 所示的机械手手指采用弓形的金属刚性骨架的手指结构,其依靠橡胶带的变形来包裹抓取物体;图1-4 所示的机械手手指采用橡胶桁架的手指结构,其依靠橡胶手爪的变形来包络抓取物体。可以针对不同的抓取目标选择不同的两种手指。并且该机械手的空间连杆结构可以使机械手手掌具有一个独立的自由度,机械手的两个动手指可以相对机械手手掌中心转动。
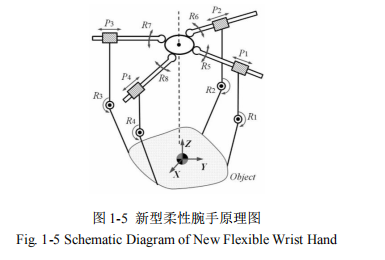
如图 1-5 所示,江南大学提出了一种新型柔性腕手[10],通过对章鱼抓持机理的研究,从仿生角度设计了该机械手。该机械手手指安装座可以同时实现变位和转位,因此机械手手掌可以构成任意的多边形构型,这意味着该机械手理论上可以实现对一定尺寸范围内的任意形状的物体进行抓取。
1.2.2 采用柔性手指的机械手研究现状
柔性手指可以分为刚柔耦合骨架手指与软体手指。与软体手指相比,刚柔耦合骨架手指具有较好的刚性的同时还兼具柔性。同时刚柔耦合骨架手指可以更好的控制机械手与被抓物体间的接触力。
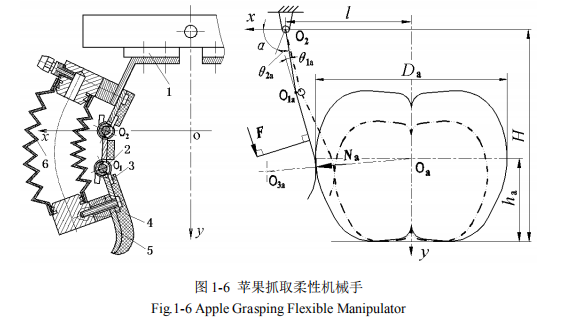
江南大学章军博士等提出了一种轴向膨胀加载式橡胶波纹管人工肌肉驱动器[11-16].并将这种人工肌肉作为机械手的手指驱动。如图 1-6 所示,苹果抓取柔性机械手。该机械手结构、控制简单,在系统压力下通过安装在机械手手指上的两个扭弹簧协调变形来适应苹果的外形。在保持机械手的高度不变且不需要压力传感器就可以可靠地抓取各种尺寸的苹果。
江南大学提出了一种气缸直接驱动欠驱动机械手手指的驱动控制方法[17-18],在此基础上根据不同的机械手手指结构设计了两种欠驱动机械手。这两种机械手均以苹果为抓取对象,并按照抓取最小至最大尺寸的苹果时机械手手指与苹果间的接触力变化最小为目标优化了机械手的尺寸参数。

如图 1-7 所示,第一种机械手的柔性手指为板弹簧手指,通过控制笔形气缸的压力的大小来控制板弹簧手指的弯曲变形程度,通过合适的板弹簧手指的弯曲变形来抓取各种尺寸的苹果。但大变形板弹簧的求解比较困难,很难控制机械手抓取物体时的接触力,所以该机械手无法抓取易损坏的物体。
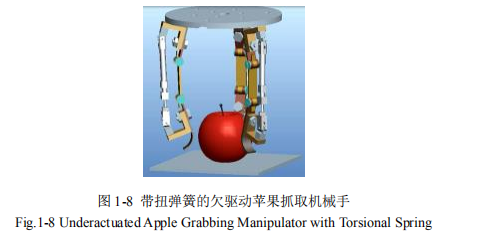
如图 1-8 所示,第二种欠驱动机械手选择串联活页铰链骨架作为机械手的手指。通过控制笔形气缸的推力,求解两个扭弹簧在气缸压力推动下的变形协调方程来计算机械手中指节、指尖节的转动角度。该机械手的控制很简单,只需控制气缸压力为系统压力,机械手在无压力、接触力反馈的条件下就可以可靠地抓取各种尺寸的苹果。由于机械手手指的安装位置固定,该机械手无法抓取方形的物体。并且不能精确地调节机械手与物体间的接触力,因此该机械手无法抓取质软或易损坏物品。

如图 1-9 所示,在 2017 年中科大自主研发的软体机械手[19]获得了机器人世界杯最佳操作奖,机械手手指选用了柔性的橡胶手指。与刚性手指相比气动的软体手指可以更好地贴合被抓物体表面。但该机械手只有两个手指导致其抓取可靠性较差。并且缺少刚性的骨架会导致该机械手手指的抗扭转刚度较差。

如图 1-10 所示,苏州柔触机器人科技有限公司提出了一种新型软体机械手[20],该机械手的应用范围广泛,可以应用于物流、电子产品、食品等行业。硅橡胶制造的机械手手指采用气压驱动,这种机械手有两种工作模式(正压、负压)。
正压工作模式下气动机械手从外部抓取被抓物体,负压工作模式下机械手从被抓物体内部撑开来实现抓取物体。调节不同的气压可以使机械手产生不同的工作构型,在一定尺寸范围内的物体,机械手无需知道被抓取对象精确的尺寸就可以实现可靠的抓取。机械手手掌构型不能改变,但机械手有多种手指安装框架上,可以根据抓取目标的尺寸手动选择特定的框架。指根位置不变(不转位或变位),因此软体手指与被抓物体接触不在接触点公法线方向、形状适应性差;指根不转动,与水平面的夹角不变,与物体的接触状态不能调节。
1.3 本文主要研究内容
针对现在农业、轻工业与食品行业中待抓取的对象复杂性(尺寸与形状变化大、物性多样、摆放位置混乱),本文研发了一种可控制机械手手指与物体间的接触力的新型欠驱动机械手,主要工作内容有。
(1)基于可变手掌机械手的理念,构造一种新型欠驱动机械手。主要包括:
机械手手掌与手指的结构设计,机械手的数学建模与分析,针对不同尺寸的长方体、圆柱体与椭圆柱作抓取构型分析。
(2)优化机械手尺寸,并分析机械手的工作状态与性能。主要包括:以节能的原则,使用 Matlab 软件按抓取最重的灌装饮料时手指驱动气缸的压力最小为优化目标,对机械手结构尺寸、扭弹簧参数进行优化,并进行扭弹簧的设计计算。
(3)分析机械手的工作状态,使用 Adams 软件进行机械手抓取静力学验证。
主要包括:使用 Matlab 软件计算、分析机械手的抓取状态,使用 Adams 软件建立机械手三维仿真模型,并完成机械手抓取物体的静力学仿真验证与分析。
(4)机械手控制系统的设计。主要包括:气动控制回路设计,PLC 控制系统的电路设计,及控制程序设计。
(5)机械手的抓取实验:机械手实物的制作与气动控制回路的搭建,实验平台的搭建,进行系统精确控制气压性能的测试,并进行机械手的抓取自适应实验。
第二章 复合驱动柔性欠驱动机械手结构设计与分析
2.1 复合驱动柔性欠驱动机械手结构设计与工作原理
2.1.1 可变手掌与刚柔耦合骨架手指驱动方式选择
2.1.2 指根转位与转动变掌功能性分析与结构设计
2.1.3 刚柔耦合骨架手指结构设计
2.1.4 复合驱动柔性欠驱动机械手工作原理
2.1.5 复合驱动柔性欠驱动机械手结构参数分析
2.2 刚柔耦合骨架手指运动学分析
2.2.1 刚柔耦合骨架手指数学建模
2.2.2 刚柔耦合骨架手指运动学分析
2.2.3 复合驱动柔性欠驱动机械手形状适应性分析
2.3 复合驱动柔性欠驱动机械手抓取过程静力学分析
2.3.1 空载(非接触)过程模型与静力学分析
2.3.2 接触临界状态模型与静力学分析
2.3.3 加载接触变化过程模型与静力学分析
2.3.4 悬停抓取状态模型与静力学分析
2.4 本章小结
第三章 复合驱动柔性欠驱动机械手性能分析与仿真
3.1 复合驱动柔性欠驱动机械手尺寸参数优化
3.1.1 优化目标与优化参数选取
3.1.2 尺寸参数优化过程
3.1.3 尺寸优化结果与数学仿真验算
3.1.4 非标扭弹簧设计计算
3.2 复合驱动柔性欠驱动机械手工作状态分析
3.2.1 复合驱动柔性欠驱动机械手空载状态分析
3.2.2 复合驱动柔性欠驱动机械手静载状态分析
3.2.3 复合驱动柔性欠驱动机械手悬停抓取状态分析
3.3 制造误差对抓取性能影响
3.3.1 计算机械手抓取参数
3.3.2 实际加工误差分析
3.4 复合驱动柔性欠驱动机械手理论模型仿真分析
3.4.1 Adams 软件介绍
3.4.2 Adams 仿真模型建立
3.4.3 复合驱动柔性欠驱动机械手空载模型仿真验证
3.4.4 复合驱动柔性欠驱动机械手静载模型仿真验证
3.4.5 接触力误差分析
3.5 本章小结
第四章 复合驱动柔性欠驱动机械手控制系统设计
4.1 气动控制回路设计
4.1.1 气动回路结构组成
4.2 关键元器件选型
4.2.1 控制器选择与 I/O 口分配
4.2.2 监控单元选型
4.2.3 驱动电机及驱动器选型
4.3 复合驱动柔性欠驱动机械手控制方案设计
4.4 复合驱动柔性欠驱动机械手控制策略
4.4.1 气动回路压力控制
4.4.2 气动回路模糊控制
4.5 软件系统设计
4.5.1 触摸屏界面设计
4.5.2 程序控制流程
4.6 本章小结
第五章 复合驱动柔性欠驱动机械手抓取实验
5.1 实验平台搭建
5.1.1 复合驱动柔性欠驱动机械手组成介绍
5.1.2 复合驱动柔性欠驱动机械手抓取控制
5.1.3 驱动气缸压力测试
5.2 复合驱动柔性欠驱动机械手空载状态验证
5.2.1 复合驱动柔性欠驱动机械手尺寸参数测量
5.2.2 电机驱动指根节精确转动实验验证
5.2.3 气缸驱动柔性关节转动实验验证
5.3 复合驱动柔性欠驱动机械手抓取适应性验证
5.4 本章小结
第六章 总结与展望
6.1 主要结论
对机械手抓取物体的性能进行了研究,主要实现了机械手具有较大的抓取范围(尺寸及形状),同时实现了对机械手手指与被抓物体间的接触力进行详细的分析。
本文的主要内容如下1.查阅了国内外的欠驱动机械手的有关资料,通过对现阶段轻工业、食品业以及农业等机械手的应用情况的调查,阐述了新型欠驱动机械手的应用背景及意义;2.研究了现有的欠驱动机械手的结构及特点,在总结了实验室师兄的研究成果的基础上提出了新的机械手结构,并针对机械手手抓取圆柱体、长方体和椭圆柱作了静力学分析;3.选择抓取常见的最重的罐装饮料时机械手手指驱动气缸的推力最小为优化目标,优化了机械手与扭弹簧的尺寸参数。并在 Adams 软件中对进行了机械手的空载与静载两种状态的静力学仿真分析,验证了机械手运动学、静力学模型的正确性。
4.完成了机械手控制系统的软硬件设计,主要包括:气动控制回路与电气控制回路的设计,并通过编程实现了手动微调功能与手动输入控制参数抓取物体。 5.完成了电、气控制回路的搭建,并测试了气压控制的可靠性。完成了机械手的空载工作状态测量,验证了指根节转动模型的正确性。通过机械手的抓取适应性实验,验证了机械手的抓取可靠性与对被抓物体的形状、尺寸适应性。
6.2 展望
本文提出的新型欠驱动机械手结构较为简单并且控制也不繁琐,在实际应用中前景非常广阔。但对该机械手的研究存在很多不足,在接下来的研究中需要进行进一步的讨论。
1.实现了对手指驱动气缸压力的控制,但在理论计算时忽略了各个零件间以及气缸的摩擦力。在实际测试时中指节、指尖节的转动角度的误差超过了 10%,为了减少摩擦力带来的影响,可以使用气动人工作为机械手中指节、指尖节的驱动;
2.为了更好的控制机械手与物体间的接触力采用了圆弧型的指尖节,但指尖节尺寸较大,在抓取与操作物体过程中可能会与其他物体相干涉。在操作空间较小的场景下可以更换尺寸较小的指尖节手指;
3.机械手对于某个物体的抓取位姿的优选,在机械手抓取物体模型的计算时可以得到很多个解。本文主要针对手指驱动气缸压力最小为原则选择了其中的较优解,可以根据不同的场景以不同的原则来对机械手的抓取位姿进行筛选;
4.机械手的抓取需要预先得知被抓物体的各个参数,计算出抓取该物体所需的控制参数并手动在触摸屏上输入,没有考虑与机械手配套的视觉控制系统来实现机械手对各个尺寸、形状的物体的自动抓取;
5.机械手使用了单作用气缸作为机械手动手指转位的驱动源,但气缸的精确性与稳定性较差,可以将电机作为机械手两个动手指转位的驱动源;
6.只进行了机械手的静力学模型的计算与仿真,没有使用 Matlab 软件的Simulink 模块与 Adams 软件对机械手的动力学模型进行联合仿真。
7.文中只对机械手抓取圆柱体、长方体和椭圆柱这些规则物体进行抓取分析,需要进一步优化机械手结构,并对不规则的物体进行抓取分析。
致谢
转眼间,我的研究生学习生涯就要结束了,在这三年的学习生涯中,江南大学机械学院的领导及老师给了我一个很好地学习平台,在这里我不但认识到了很多要好的志同道合的朋友,而且更重要的是章军教授能成为了我的研究生导师。
章老师敏锐的思考问题解决问题的能力深深的影响了我,在这里我真诚及尊敬的说声谢谢您,您辛苦了!
在研究生期间认识的朋友,王城坡、王强、徐丁峰、李秋苹、章佳平和范晨阳等等,在学习上我们互相帮助,遇到困难时大家一起帮忙解决,很高兴我们能一起走过这人生的重要几年,正式因为有了你们,使我的研究生生活也丰富多彩了许多,能认识你们是我的荣幸。
在这里我特别感谢我的家人,正因为你们不断的支持与鼓励,才使我走到今天。你们不辞辛苦的将我养大成人,给予我在物质上和精神上的支持,使我能顺利的完成研究生学业。
参考文献
[1]蔡自兴。 机器人学基础[M]. 北京: 机械工业出版社, 2009.
[2]2018 年我国机器人行业现状及发展趋势分析。[DB/OL].[2018.6.6].http://www.chyxx.com/industry/201806/647131.html
[3]曹泓浩。工业机器人的应用现状及发展趋势[J].科技风,2019(05):145.
[4]张立彬,农业机器人的主要应用领域和关键技术[J].浙江工业大学学报,2002, 30(1): 36-41.
[5]林龙贤。果蔬采摘欠驱动手爪研究[D],浙江:浙江大学,2013:67-71.
[6]范晨阳。 基于双曲柄连杆的变掌机械手研究[D].江南大学,2018.
[7] Higashimori M, Jeong H, Ishii I, et al. A new four-fingered robot hand with dual turning mechanism[C]//Proceedings of the 2005 IEEE, InternationalConference on Robotics and Automation, Barcelona, Spain, April 2005: 2679-2684
[8] Odhner L U, Jentoft L P, Claffee M R, et al. A compliant, underactuated hand for robot manipulation[J]. The International Journal of Robotics Research, 2014, 33(5): 736-752
[9]MultiChoiceGripper Variable gripping based on the human hand.[DB/OL].
[2017-7-7].https://www.festo.com/group/en/cms/10221.htm
[10]李建海。新型仿生柔性腕手可变腕掌构型研究[D].江南大学,2017.
[11]杨庆华,张立彬,鲍官军,等。气动柔性弯曲关节的特性及其神经 PID 控制算法研究[J].农业工程学报,2004,20(4):88-91.
[12]杨庆华,张立彬,阮健,基于新型气动柔性驱动器的气动柔性关节的研究[C]//中国第二届优秀博士生学术年会论文集,苏州,2004:951-955.
[13]张立彬,鲍官军,杨庆华,等。气动柔性球关节的模糊 PID 控制[J].中国机械工程,2005,16(5):407-409.
[14]王干永,李克修,章军。单根气动膨胀人工肌肉驱动多铰链柔性关节的静态分析[J].轻工机械,2008(02):88-90.
[15]章军,须文波。人工肌肉多自由度弯曲柔性关节的仿生蛇形机器人[J].江南大学学报,2006(03):337-340.
[16]章军,须文波,范本隽。人工肌肉构成的多自由度柔性弯曲关节的模型研究[J].液压与气动,2005(12):6-8.
[17]刘光元。 一种新型机器人关节的结构与控制[D].江南大学,2013.
[18]Jun Zhang and Guangyuan Liu. Self-adaption grasping force analysis for an apple sorting hand-claw with robustness [J]. Robotica, July 2014, :1 - 15
[19]中国科大研发柔性机器人手爪可抓豆腐纸张玻璃杯。[DB/OL].[2018.12.11].http://www.chinanews.com/gn/2018/12-11/8698692.shtml
[20 ]苏州柔触机器人科技有限公司。[DB/OL].http://www.softrobottech.com/
[21]王敏,吕学勤,瞿艳,王裕东,钦超。机器人驱动方式及其在焊接机器人中的应用[J].机械制造文摘(焊接分册),2018(02):25-30.
[22]乔锋华。基于欠驱动机构的机械手的研究[D].哈尔滨:哈尔滨工程大学,2007:15-17.
[23]卜夺夺。仿人机器人欠驱动灵巧手研究[D].杭州:杭州电子科技大学,2011:11-16.
[24]刘明生。一种约束优化问题的直接算法-正交网格法[J].教学与科技,1987,3:17-77
[25]黄华江。实用化工计算机模拟-MATLAB 在化学工程中的应用[M].北京:化学工业出版社,2004.191-216.
[26] 秦大同,谢里阳。现代机械设计手册:单行本。弹簧设计[M].北京:化学工业出版社,2013:48-51.
[27]百度文库。摩擦系数表。[DB/OL].[2017-7-7].https://wenku.baidu.com/view/539b448fbceb19e8b8f6ba52.html.
[28]陈德民,槐创锋,张克涛等。精通 ADAMS2005/2007 虚拟样机技术[M].北京:化学工业出版社,2010:19-59.
[29]葛正浩。ADAMS2007 虚拟样机技术[M].北京:化学工业出版社,2010:70-110.
[30]王嘉研。欠驱动机械手的设计与实验研究[D],沈阳:东北大学,2009:33-45.
[31]裴未迟,李耀刚,李运红。基于虚拟样机技术-ADAMS 的冲击力模型[J].河北理工大学学报(自然科学版),2008,30(4):59-63.
[32]小型缸的气-液串联复合驱动系统的动态仿真[J].机床与液压,2007,35(3):94-96
[33]信捷 XD 系列 PLC 编程手册。 [34]薛迎成。 PLC 与触摸屏控制技术[M].中国电力出版社,2008.
[35]韩兵。触摸屏技术及应用[M].化学工业出版社,2008.
[36]王宗培。步进电动机的发展及建议[J].微电机,2004,37(4):47-49.
[37]张劲松,徐殿国。步进电动机开环控制系统的微机实现[C].第九届全国电气自动化、电控系统学术年会论文集,1998,10.
[38]周凯。步进驱动系统的高精度闭环控制[J].电机与控制学报,1998, 2(1):13-17.
[39] 马正平 .两 相混合 式步进 电机微 步驱动 系统的 研究 [D]. 成都 :成都 电子科 技大学,2000:28-36.
[40]唐爱民。三相混合式步进电机细分驱动系统的研究与实现[D].福州:福州大学,2003:21-27.
[41]史敬灼,王宗培。步进电动机驱动控制技术的发展[J].微特电机,2007,(7):50-54.
[42]黄诗涌,王晓初,廖永进等。一种高性能的步进电机运动控制系统设计[J],微计算机信息,2006, 22(16):38-39.
[43]高强,朱玉川,罗樟,陈晓明。高速开关阀的复合 PWM 控制策略分析与优化[J].北京航空航天大学学报,2019,45(06):1129-1136.
[44]张斌,钟麒,杨华勇。高速开关阀控制策略研究[J].液压与气动,2017(06):7-11.
[45]谢胜龙,刘海涛,梅江平,王攀峰。基于高速开关阀的气动人工肌肉轨迹跟踪控制仿真[J].农业机械学报,2017,48(01):368-374+385.
[46]王琼,吴惠,夏光,张维。基于 PWM 控制模式的高速开关阀开关特性分析及优化[J].合肥工业大学学报(自然科学版),2016,39(09):1199-1204
(如您需要查看本篇毕业设计全文,可点击全文下载进行查看)