24Сʱ���Ķ�������
24Сʱ���Ķ�������
����ժ Ҫ
���������Ź�ҵ��е������С�ͼӹ�������ҵ��Ͷ���ʹ��,��е�ۿ��Գ�ɫ������ظ�������,�����������˹�����ͳ�ӹ���ҵ�Զ���ˮƽ,�����˲�Ʒ�ӹ�����,��Ч������˹��������ʼ����������ɱ�.���,���Ź�ҵ��е��Ӧ�ó����������ķ�չ,���̵����������Ի����˵���������ȵȷ�������˸��ߵ�Ҫ��.��ҵ��е�ۿ���ϵͳ�����ſ����ԡ�ģ�黯�ķ���չ,�����Ӧ���ֻ������Լ۱ȸ�,������С�ͼӹ���������Ļ�е���˶�����ϵͳ���ڱ���.���ĵ���ҪĿ��Ϊͨ�������ķֲ�ṹ�Ļ�е�ۿ���ϵͳ��Ӳ��ƽ̨,ʵ�ֶԹ�ҵ��е�۵Ŀ���.��Ҫ�Ĺ�����������:
����(1)��е���˶�����ϵͳ���.ϵͳ����"PC+STM32"����������ϵ�ṹ,������ж���ļܹ�,��Ч�ؽ����з��ɱ�,�����ϵͳ�ṹ�ȶ���,�ܶԲ�ͬӦ�����͵Ļ�е�ۿ��Ʒ������п���ʵ��.��λ�����л��� Visual C++��Ƶ���λ����������,ʵ���˻�е�ۿ���ϵͳ���˶����ơ������ȹ���.��λ��Ϊ�����˿�����,���� STM32 ��������Ϊ�����˿�����������оƬ,��Ҫ��������˵��˶�����,����ͨ�� I/O �ӿ���������ŷ�ϵͳ��������������Ƶ��,��ɶԻ�е���ŷ�ϵͳ�Ŀ���,����ʵ�ֻ����˹ؽ���������.���� PID �����㷨,������������λ����Ϣ��ʵ��λ����Ϣƫ��,����λ�ÿ������,����ʵ�ֻ�е�۵�������ת����ɼĶ����Ŀ���.
����(2)��е���˶��滮�㷨��λ�ÿ��Ʋ����о�.��������˻�е�۹ؽ��ٶ������˶��滮����,ͨ����������ѧ��������������˶��滮������,��Ч������е��ĩ�������л�ʱ�ؽ��ٶ����������λ�����,���ͨ��������֤�����˶��滮������ȷ��.��Ե����е���ŷ�ϵͳ,����˻�������Ӧ�������Ļ�е���ŷ�ϵͳ��λ�ÿ��Ʋ���,����Ƶĸ��ٿ����㷨���п��Ŷ��ԡ������Ե��ŵ�,������֤����Ч��.
����(3)��ɶԻ�е���˶�����ϵͳ�����ϵ��Ժ�ʵ�����,����ƵĿ���ϵͳ�ܹ�ʵ�ֻ�е�۱���Ŀ�������,������������.
�����ؼ���:��ҵ��е��;�Զ���;����ϵͳ;�˶��滮;λ�ÿ���
����Abstract
����With the input and use of industrial robot manipulators in small and medium-sizedmanufacturing companies. The automation level of processing operations in traditionalfactories has been significantly improved. The production cycle of products has been short,and finally the purpose of improving factory productivity and reducing production costs hasbeen achieved. However, due to the persified development of industrial robot manipulatorapplication scenarios, the harsh production conditions put forward higher requirements onthe robot size, flexibility and other aspects. At present, The industrial robot manipulatorcontrol system is developing in the direction of openness and modularization. It isimperative to design a robot manipulator control system with high adaptability and meetingthe needs of small and medium-sized processing factories. The main purpose of this paperare to establish a layered structure of the robot manipulator control system software andhardware platform, and realize the control of the industrial robot manipulator. The specificwork contents are as follows:
����(1) Robot manipulator motion control system designed. This paper adopts the"PC+STM32" hierarchical structure control system to replace the existing multi-corestructure control system, which can effectively to reduce the research and development cost,improve the stability of the system structure, and it can realize the control of different typesof robot manipulator quickly. The PC adopts Visual C++ designed control software torealize the motion control, interaction and other functions of the robot manipulator controlsystem, and it realizes the motion control, interaction and other functions of the robotmanipulator control system. The slave system uses the STM32 microprocessor as the mainMCU of the robot controller, which is mainly responsible for the motion of the robot. Thenumber and frequency of pulses are sent to the robot servo system through the I/O interfaceto complete the control of the robot manipulator servo system, so as to realize the linkagecontrol of the robot joints. The PID control algorithm is adopted to process the deviationfrom the given position information and the actual position information, so as to improvethe position control accuracy, and finally realize the normal operation of the mechanical armand complete the simple action control.
����(2) Research on robot manipulator motion planning algorithm and position controlstrategy. In this paper, the robot manipulator joint velocity-continuity motion planningscheme is proposed. By introducing the neural-dynamic design method of the proposedrobot motion planning scheme, the manipulator end-effector's positioning error caused bythe joint-velocity jumped when the robot manipulator task-shifting is effectively eliminated. Finally, the simulation verification is carried out, and the proposed motion planning schemeis accurate. For the single-degree-of-freedom manipulator servo system, the positioncontrol strategy of the manipulator servo system based on the adaptive backsteppingmethod is designed, and the designed tracking control algorithm has the advantages ofanti-disturbance and rapidity, and its effectiveness is verified by simulation.
����(3) In this part, the joint debugging and experimental analysis of the manipulatormotion control system is Completed. It can be seen from the results of debugging andexperiment that the control system can realize the control of the robot manipulator and thecontrol performance is good.
����Keywords: Industrial robotic manipulator; Automation; Control system; Motionplanning; Position control
����Ŀ ¼
����ժ Ҫ ................................................................ I
����Abstract ............................................................. II
������һ�� ���� ............................................................ 1
����1.1 ���� ........................................................... 1
����1.2 ��������������� ............................................. 2
����1.3 ��ҵ��е���˶�����ϵͳ�о���״ ................................. 3
����1.3.1 ��е�ۿ���ϵͳ��ϵ�ṹ���� ............................... 3
����1.3.2 �����˿������о���״ ..................................... 5
����1.3.3 ��е���˶��滮������㷨�о���״ ......................... 6
����1.4 �����о�����Ҫ���ݼ��½ڰ��� .................................. 8
�����ڶ��� ����ϵͳ������Ʒ��� ........................................... 9
����2.1 ���� ........................................................... 9
����2.2 ����ϵͳ�������� ............................................... 9
����2.2.1 ������ѡ�� ................................................ 9
����2.2.2 ϵͳ�ܹ����� ............................................ 10
����2.2.3 ������������ϵͳ�������� ................................ 11
����2.4 ��е�۵������������ .......................................... 12
����2.5 ������ ...................................................... 12
���������� ��е���˶�����ϵͳ��� ........................................ 14
����3.1 ���� .......................................................... 14
����3.2 ϵͳӲ��ģ����� .............................................. 14
����3.2.1 �����˿�����Ӳ����� .................................... 15
����3.2.2 �����˿���������ģ����� ................................ 15
����3.2.3 �������˶��ŷ�ϵͳ ...................................... 22
����3.3 �����˿������������ .......................................... 22
����3.3.1 ������������� .......................................... 22
����3.3.2 ��Ҫ�ӳ������ .......................................... 23
����3.4 ��λ��ϵͳ��� ................................................ 26
����3.5 ������ ...................................................... 27
���������� ��е���˶��滮������㷨�о� .................................. 28
����4.1 ���� .......................................................... 28
����4.2 ��е���˶��滮�㷨�о� ........................................ 28
����4.2.1 ��е���˶�ѧģ�ͽ��� .................................... 28
����4.2.2 ��ʽ�Ƶ� ................................................ 30
����4.2.3 �����о� ................................................ 32
����4.3 �����е������滮 ........................................... 37
����4.3.1 �����е���˶�ѧģ�� .................................... 37
����4.3.2 �����е�۹켣���� ...................................... 39
����4.4 ��������Ӧ�������Ļ�е�ۿ��Ʋ����о� .......................... 40
����4.4.1 ϵͳģ�� ................................................ 41
����4.4.2 ����Ӧ��������������� ................................... 42
����4.4.3 ϵͳ�������� ............................................ 43
����4.4.4 ���������� .......................................... 44
����4.5 ������ ...................................................... 45
���������� ����ϵͳ���ϵ�������� ........................................ 46
����5.1 ���� .......................................................... 46
����5.2 ��е�ۿ���ϵͳ ................................................ 46
����5.2.1 ��е�۱��弰����ϵͳ .................................... 46
����5.2.2 ��е���ŷ�ϵͳ���� ...................................... 47
����5.3 ��е���ֶ��������� ............................................ 47
����5.4 ��е���Զ��������� ............................................ 48
����5.5 ������ ...................................................... 49
���������� �ܽ���չ�� .................................................... 50
����6.1 �����ܽ� ...................................................... 50
����6.2 ����չ�� ...................................................... 50
��������� ............................................................. 52
�����������ĺͲμӿ������ ............................................... 56
������ л ............................................................... 57
������һ�� ����
����1.1 ����
����������,����"��ҵ 4.0"����IJ����,Ϊ��ʵ���й����� 2025 ��������ǿ����ս��Ŀ��,������ʵ���������������������ǿ����ת��,�����˼������ǻ۹���Ϊ���ṩ����Ҫ�����к�֧��[1~3].�����Ż����˼��������չ,��ͬ���͡���ͬ���ܵĹ�ҵ��������̵���,�����������ˡ���Ϳ�����ˡ����ӻ����ˡ��������˵�,������ҲԽ��Խ���뵽�ִ�������������ķ�������,�����ڻ�е���졢�������졢�ҵ�����ȷ��浣������Ҫ�Ľ�ɫ,���,�����˵��ռ�,ʵ���˹���������ҵ�Զ���,���������������Ч��[4~9].
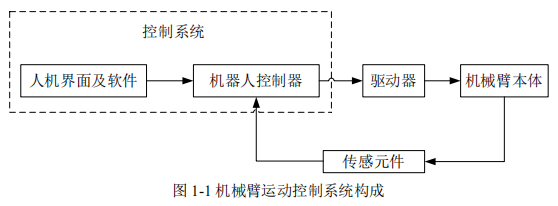
������ҵ��е���˶�����ϵͳһ���ɻ����˿�����������Ԫ����ִ�л����ͻ�е�۱���Ȳ��ֹ���,��ͼ 1-1 ��ʾ[10].�����˿�����Ϊ��ҵ�����˵Ĵ���,������������ɵĶ��������Ӧ��ָ����Ϣ,ͨ�����Ƶ���ȶ�������װ��,ʹ�û�������ȷ������,��ɻ�����ϵͳԤ���Ķ�������ҵ����.�������ҹ����õķ�չ,��ͳ��ҵ��ת������,Խ��Խ��Ĺ�ҵ��е�۱�Ͷ�뵽��ҵ������,����˼���װ����ˮƽ[1],[3].���������û�е�۴�ȡ���ʽ���ƽṹ,������ר�õļ������Ϊϵͳ����������,��ṹ�̶�,�ҹ��ܵ�һ,������ϵͳ��ά���Ľ�[11].���Ź�ҵ 4.0 ʱ���ĵ���,�������Ѿ���Ϊ��������Ĺؼ�,�����˿��Ƽ���Ҳ���ɷ��ʽ���ſ���ʽ����ģʽת��,�Ӷ������߶�����,���ܿɶ��ƵĻ�����,��Ӧʱ���ķ�չ������[3].
��������ͨ������ STM32 Ƕ��ʽ������,�����"PC+STM32"����������ϵ�ṹ�Ļ�е���˶�����ϵͳ,����ȵ�ʵ�ֻ�е�ۿ���ϵͳ�Ŀ��Ż���ģ�黯�ij̶�.��������Ƶ�Ƕ��ʽ�����˿�����,����ڲ����˶����ƿ��� PLC �ȿ���������,�ɼ������е����ҵ�ֳ��ļӹ�Ч��,������гɱ��͡��ȶ��ԺͿɿ��Ըߵ�����[12],[13].
����1.2 ���������������
�����ӵ�һ̨��ҵ�����˳��ֵ�����Ϊֹ,�������Ѿ������� 70 ��ķ�չ�ó�.���ݹ�ҵ�����˵��о��ͷ�չ����,ͨ�����䷢չ��Ϊ����������[10],[14],[15]:
����(1)̽�������(1940-1960):��ҵ�����˵ķ�չ����,���Ź�ҵ�����IJ������������,�г��ľ������漤��.��ͳ���ֹ���ҵԶԶ����������������,�������Զ����豸Ͷ������,��־�Ż�����ʱ���ĵ���.
����(2)����Ӧ�ý�(1960-1970):��ҵ�����˵ķ�չ����,��һʱ��,�������г�������һ���Ӿ�,�Բ�Ʒ�ĸ����ٶȡ�����Ч�ʡ�������Ҫ���һ�����.
����(3)ʵ����Ʒ��(1970-����):��ҵ�����˵ķ�չ������,��ҵ�������о��ͷ�չ��,�ܹ����и��ӵ������ƺ;��ߵ����ܻ�������[10].��ʵ�������Զ���������,�������������Ļ�ȡ����������Լ��������Ӳ���ĺ�������.
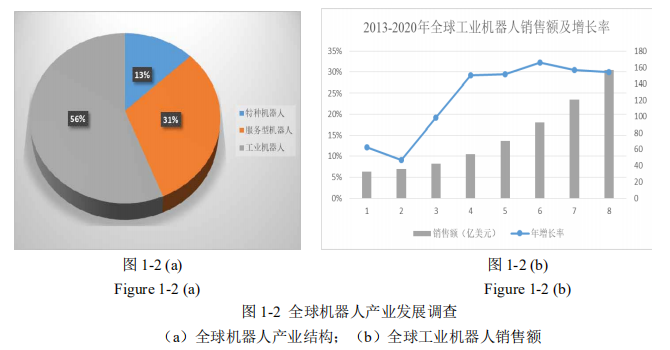
������ͼ 1-2 ��ʾΪȫ������˲�ҵ��չ�������� [16].�ɴ˿ɼ�,��ҵ�����˻�е�ֵ�Ͷ���ʹ��,���й㷺��Ӧ������,�������ն��û�����ǰδ�����ij����в������ּ���,��Ͷ��ʹ��,��Ӧ��,���������˶���ָ����ʽҲ����Խ��Խ����,���ڻ����˵ķ�Ӧ�ԡ���Ӧ�Ե��µ�����Ҳ����˸��ߵ�Ҫ��.���ǿ�����Ч��������Ӧ��ִ�в���,���Խ�һ����������˶��������,�ر���������������Ĺ�����,�����˿��Գ�ɫ����ظ�������,�����Զ�����Ӧ��,�����߹������Ͷ��������Լ���Լ�����ɱ�.Ϊ�˽�һ����ǿ�㷺ʹ�ù�ҵ������,�����������Э��������,�б�Ҫ�����˱��,�Ӷ�ʹ�����ܹ��ɷ�ר���û�����.��ҵ�����˵�Ӧ�ó������ӹ㷺,���̵����������Ի�������������ȵ��������Ҫ��,���,��ҵ������������С�ͻ������ܻ������Ի��ķ���չ[16].
������ҵ��е�۵����ڶ��ص���ƽṹ,�ܹ��ڶ������õ��㷺���ƹ�ʹ��,��ͨ�����ز�ͬ���͵�ĩ��ִ����,�����Ӧ����ҵ����,������⡢��Ϳ���и��[5],[17].�ִ����Ļ�еϵͳ,���������ˡ��㺸�������Լ��Զ�����е�豸��,������Ҫ���ٶȡ��߾��ȵĿ���.��ͳ���ֹ���ҵ,��������Ч�ʵ���,������ҵ��������ʵ�,��Ϊ���,���ù�ҵ��е�۴������������Ҫ������,�����˹����������ӹ����Զ���ˮƽ,������Ź㷺��Ӧ�ñ���.���,��ҵ��е�ֱ۾��е�����������:һ��������������,�ܹ���Ϊһ������������,�����ٸ��¡��ж���ȱ���ȼ���Σ�յĻ�����,��������������ҵ,��Ч�ر������ֹ���ҵ��Ա������ȫ;���ǿ��ظ�ʹ����,��ҵ��������Ϊһ�������װ��,��ϸ�ĵ�ά���ͱ�����ͬʱ,���Է������ʹ��,�Ӷ�������Ч��;�����˹���������,��ҵ�����˿��Ը����ֳ���ʵ�����,�ܹ������Ľ��������ռ������������䷴��,�����жϺ�ʶ��������,�����ҵ����[18],[19].
�����ҹ���ҵ�����˵ķ�չ����,�� 20 ���� 90 �������,�ҹ���ҵ�����˵IJ���һֱ������������ 20%����,�ҹ���ʽ����ҵ����������Ƽ����ؼƻ�,������չ��ҵ������[20],[21].Ŀǰ,�ҹ��Ĺ�ҵ�����˲�ҵ��չ���������ŷ���ȷ������,�й����� 2025 ��ȷ����������Ϊ����ҵ�ص�ͻ������[2],[3].һ����,����Ʒ�ƵĻ����˴��ۼۺ��ۺ����,�������й��г��Ի����˵�����,�����Զ����������ٷ�չ,�ҹ��Ѿ���Ϊ�����Զ����豸���Ѵ��;��һ����,�й������˲�ҵ����ӵ���Լ��ĺ��ļ���,�Ӷ��ڻ����˼�����չ���˳�����������.��������,�Թ�ҵ��е���˶�����ϵͳ���о�������Ҫ������.
����������Ϊ������С�ͼӹ���ҵ��ƵĻ�е���˶�����ϵͳ,ͨ����������ʽ�ṹ�Ĺ�ҵ��е���˶�����ϵͳ��Ӳ��ƽ̨,ʹ��ϵͳ���нṹ��ࡢ�ͳɱ������ܺͿɿ��Ժõ��ŵ�,��Ч�Ľ����˻����˿���ϵͳ���������ijɱ�,��һ������ͳ������ҵ�������ܻ����Զ�������ת��,���,���зdz���Ҫ��Ӧ�ü�ֵ.
����1.3 ��ҵ��е���˶�����ϵͳ�о���״
����������,�������˹����ܡ��������ѧ�������������Լ��뵼�弼������ؼ����ĸ���,������Ŀ��л����ڻ�е���˶�����ϵͳ���о������˺ܶ���гɹ�,��Ҫ������е�ۿ���ϵͳ����ϵ�ṹ[22],[23]�������˿�����[24],[25]�Լ��������˶��滮������㷨[26]�Ȳ���.
����1.3.1 ��е�ۿ���ϵͳ��ϵ�ṹ����
�����ӻ�е�ۿ���ϵͳ�ķ�չ����,Ŀǰ��Ҫ����������.
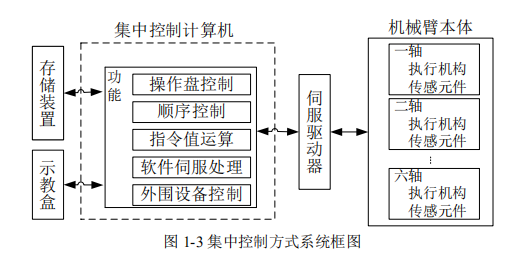
�������п��Ʒ�ʽ�Ļ����˿���ϵͳ[22],[27],������ר�ü������Ϊ�ϲ����ؼ����,ʵ��ϵͳ�����ȫ�����ƹ���,��ṹͼ��ͼ 1-3 ��ʾ.�����ڵ� PUMA ������ʹ�õ� PDP-11[27].�ڻ����˿��ƹ�����,������Ҫ���д���������,��˴��ֽṹ�Ļ����˿���ϵͳ,����ʵʱ�Բ��ȱ��.
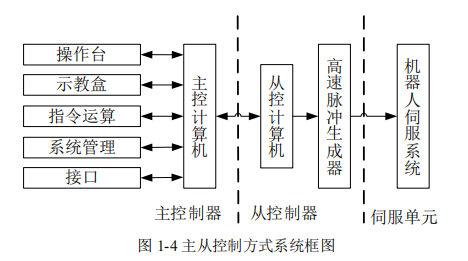
�������ӿ��Ʒ�ʽ�Ļ����˿���ϵͳ[28],ϵͳͨ���ɶ��� CPU ����,����һ�� CPUΪ����,����ϵͳ����,�켣�滮�ȹ���;���� CPU Ϊ�ӻ�,��Ҫ��������˹ؽڿ���.��ϵͳ�ṹͼ��ͼ 1-4 ��ʾ.������Ȳ����� IPC+PMAC Ϊ�����ķּ����Ʒ�ʽ�Ļ����˿���ϵͳ,ʵ����֤��ϵͳ�Ŀɿ���[28].PMAC ���й��ܷḻ,���ڿ������ŵ�,Ȼ�����װ�ȸߡ��۸�,����Ϊ����е����ѡ��,���IJ���Ƕ��ʽ��ƵĴӿ�����, �ɿ���ʵ����Ӧ���ܿ������Ҽ۸����,��Ӧ����С�ͼӹ����������ɹ�ʹ��.
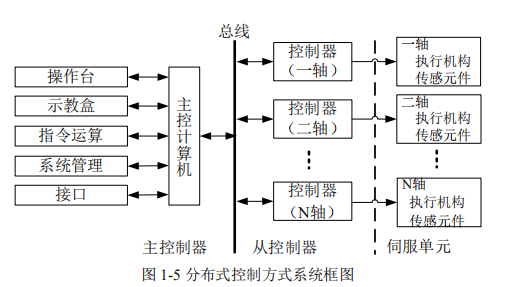
�����ֲ�ʽ���Ʒ�ʽ�Ļ����˿���ϵͳ[29],[30],�ֲ�ʽ���Ʒ�ʽΪ�ϡ���λ�������ֲ�ʽ�ṹ,�����ӿ��Ʒ�ʽ��ͬ����,��λ�����ö�� MCU ���,ÿ�� MCU �����е�۵�һ���ؽ��˶�,ͨ�����ߵķ�ʽ����������.����[29]������������������˷ֲ�ʽ�ṹ���˶��滮�о�,�������ָ����ȫ�ֹ滮����.���������õķ� �������������� �������ŷ�ϵͳ �ŷ������� ���ؼ���� �ӿؼ���� �洢װ��ʾ�̺в�ʽϵͳ���,�������ɲ�ͬ�Ľṹ��Ԫģ����ɵĻ������˶����Ʒ���ϵͳ,��������֤����ⷽ������Ч��.����[30]���Ƿ���Դ�ͳ����ʽ��ϵ�ṹ�����ڵı�,����˲��� CAN �ķֲ�ʽ����ϵͳ.ϵͳͨ�� CAN ����ʵ����ϵͳ�����Ϣ����,ͬʱ���� CAN ����ͨ������,ʹ��ϵͳ����ģ��֮������ݺ�ָ��Ĵ�����Ӹ�Ч,����������֤ϵͳ������.��ṹͼ��ͼ 1-5 ��ʾ.
����1.3.2 �����˿������о���״
��������[31]WE Ford �״�����˿���ʽ�Ļ����˿���ϵͳ����,Ϊ�������о��춨����.����[32]չʾ�˻��ڿ���ʽ�ṹ�ͽ���ʽ�û���������ͻ����˿���ϵͳ,ϵͳ�ܹ������û�������,ͨ����ϵͳ��������ϵͳ�Ĺ��ܺͲ���������,���������µĿ����㷨����,������Ӳ��,ʹ��ϵͳ���нϸߵĿɿ���,�����˻����˿���Ӧ���о��뿪��.����ʽ�Ļ����˿������Ľṹ��Ҫ�����¼��ֿ���ģʽ[33], [34]:
����(1)�� PC �ṹ�Ŀ���ģʽ
��������һ�ֵ� CPU�����п��Ʒ�ʽ.����һ̨����ȫ��� PC ����Ϊ����,����ʵʱ����ϵͳ,�����������ϵͳʵʱ�Ե�Ҫ��,��ȽϷ��ʽ�ṹ����ϵͳ,���ȶ��ԡ�³��������[35~37].
��������[35]����Ļ��� PC ���Ŀ���ʽ�����˿���ϵͳ,�佫��ҵ�����˿���ϵͳ�ĸ��ֿ��ƹ��������ۼ��ɵ�һ��ͳһ�Ļ�����,��ô���Ϊ���ٹ������ͻ�����ϵͳ�ṩ�˿�������.
��������[36]����˲��� PC ���� CNC ��Ϊ�����˿���ϵͳ�Ŀ��Ʒ���,ͨ����ʵʱ NC ���������� PC �����,ͨ�� PC ����� NC �Ĺ���.���� PC ��ǿ������㴦������,�û��������������������ܵ� PC ��,������� PC ������Ӳ����Դ,�����ǿ��ϵͳ����չ����.
��������[37]����� PC ��ȫ���Ƶ��˶����Ʒ���,PC ��ͨ������ֱ�������ķ�ʽ,���������������ص㽺������ϵͳ,PC ��ȫ���Ƶķ���,��ȫ��������ϵͳ��ʵʱ�ԡ��߾��ȵȵ�Ҫ��.
����(2)"PC+�˶����ƿ�"�ṹ�Ŀ���ģʽ
����"PC+�˶����ƿ�"Ϊ�����˷ֲ����ģʽ�Ļ����˿�����,��λ������ PC ��,����ϵͳ�����켣�滮������,��λ�����þ��ж�����ƹ��ܵ��˶����ƿ�,��Ҫ�����е�۸��ؽ��˶�����[38],[39].
��������[39]���� IPC �� PMAC �˶����ƿ����ϵ����˼·,���������ɶȹؽ�ʽ�������˶�����ϵͳ�Ŀ�������,�����˿��������÷ֲ�ʽ�Ľṹ,һ���漫�������˻����˿���ϵͳ��Ч��;��һ������ǿϵͳ����Ϣ��������,ʹϵͳ���пɿ��Ըߡ����Ŷȸߡ��˶������ŵ�,���������˶����ɶȻ������˶����Ƶ�Ҫ��,���кܴ��Ӧ��ǰ��.
����(3)����Ƕ��ʽ�������Ŀ���ģʽ
����������Ƕ��ʽ����ؼ����ķ�չ,���� ARM��DSP �� FPGA ��Ƕ��ʽ������Խ��Խ�㷺��Ӧ���ڿ���ʽ�Ļ����˿���ϵͳ��[40~42].����[40]���� STM324 ������Ϊ���ĵ�Ƕ��ʽ�����˿�����,����������˵Ŀ���.����[41]Cho J U ��ѧ���������ֳ��ɱ��������(FPGA)���ж����˶�����оƬ����ƺ�ʵ��.���� FPGA�Ķ����˶����������в�ֵ���㡢���˶�ѧ���㡢�ḻ�ӿڵȹ���,�ֲ��˴�ͳоƬ��һ���ܵ�ȱ��.����[42]Seok S ��ѧ�߲����˶�� CPU �� FPGA �ĸ߶Ȳ��л��Ŀ���ϵͳƽ̨�ܹ��Ŀ���˼·,ʹ�û������ܹ����������ӵ��˶�����,�Ҷ�˴������ļ���Ϊ FPGA �ṩ�������Ƕ��ʽ�������,��ǿ��ϵͳ�IJ��ж��߳�����,ʹ��ϵͳ����ȶ�����Ч��.
����1.3.3 ��е���˶��滮������㷨�о���״
������е��Ҫ��ɿռ��е���ҵ����,����Ҫ�Թ켣�����˶��滮�㷨[43],[44]�켣���ٿ��Ʋ���[45~48]�ȵ��о�.
����(1)�˶��滮�㷨
������ҵ�����������������а����Ų�������Ľ�ɫ,�˶��滮�㷨��������˵Ĺ���Ч�ʡ���ȷ�ȡ��ɿ���������Ҫ������.����[43]��Ի����˿ռ�ֱ��Բ���켣�滮����,������������߹��ɵĿռ�ֱ�߲岹�㷨�ͻ��ھֲ�����ϵ�Ŀռ�Բ���岹�㷨,������ͨ���Ի�����ʾ������,����������ѿ����ռ��в岹���λ��,���ս��˶�ѧ����λ����Ϣ�������˿�����ִ��,ȷ���˻����������й���ƽ��.����[44] Buschhaus A ����Թؽ��ֱۻ�����ȱ����ȷ����Ԥ���켣����ľ���ȷ��,������ȸĽ���ͨ��ϸ�岹�㷨,ͨ�����㾫ϸ�IJ�ֵ��,���ڲ���λ��ƫ��ķ���,ͨ�����㷨����ÿ����ֵ���ڵ�У�����˶�ָ��,�Է��ϲ�ͬ�����˵Ķ�̬����,��������ʵ�Ļ�����ϵͳ����֤���㷨����Ч��.
��������[49]�����һ������ռ����ɸ�����е��ϵͳ������˶��滮�ɽ�ռ���˶��滮�·���,����ͨ����е��ϵͳ�ķ�����Լ��,�Ƶ���ƽ�����Ŷ����߷���,���������Խ���������.���,���������й��̵����Ŷ����߷�Ϊ������.���,���û��ڸ�˹α��(GPM)��ֱ�������(DSM)�Ļ�ϱ�̲���,�õ��˳��������������.��ֵ�����������÷�������Ч��.
��������[50]������������������·���ϵ��˶��켣�滮����������,�����һ��ƽ������Ȼ����˵����Ź켣�滮����.Ϊ�˵õ�����Ĺ켣,ͨ����С������ʵ��ƽ������Ȼ����˵�ĩ��ִ�������˶��켣.���ַ���ͨ������е�ָ��ؽں�ĩ�˵��˶�������Լ�������ռ��е��ϰ��������,ʹ���ܹ�����С.
��������[51]�����ά�ռ䳬����Ȼ�����,�����һ���µij������е��ʱ�����Ź켣�滮����.�÷������ǵ���ά�ռ��������֪������״��λ�õľ�̬����,ͬʱ���ǻ�е�ֵ��˶�ѧԼ�����ϰ���Ĵ���,�ڻ�е��ĩ��ִ�������ɹ켣.���㷨�����ܹ�ʵ�������������Сʱ��켣.
��������[52]��Բ�����е�۵�ƽ���켣�滮,�����һ���µľ����˶�ѧ�Ͷ���ѧԼ���IJ����������˶��켣�滮����.ͨ�����������ؽڵ���������ѧģ��,����Ĺ滮�������ͨ�������µĶ�̬Լ���������ߺͼ�ͦ��Լ����ʽ�����,�˶��켣�Ĵκ���ζ���ʽ��������.
����(2)���ٿ����㷨
����Ϊ���ܹ�ʹ�û������ֱ۵�ĩ�˵�λ�á��ٶȵ�״̬���ӽ��������켣,��е�۹켣���ٿ����㷨���о��dz���Ҫ,Ȼ���������ֱ���Ϊ���͵�ǿ��ϡ������Ե�ϵͳ,���������������ܿ�������ȡ���˷ḻ���о��ɹ�.���õĿ��Ʒ��������¼���[40],[45~48].
����1. PID ����:�����˾������� PID ������,����п����ʼ�,����ʵ��,�����轨ģ,�������Ա�֤�����˿��ƾ������õĶ�̬�;�̬����.��Դ�ͳ PID ���ƽṹ��,����Ч����һЩ���ӵĹ���,����[40]����˻�����λ�û��в���PID+ǰ�������˼·,���Լ������� PID �ĸ������e k( ) ,��Ч����ϵͳ��λ�ø��ٿ��ƾ���.����[45]���� RBF ������ƽ���ģ���Ͳ�ȷ������,����˻�е�۶���ѧģ�͵ķ����ԺͲ�ȷ��������,������֤�÷����������õĸ�������.���� [46] Yuan Jing �Ȼ��ڷ��������Ļ��� BP �㷨,������ڸĽ������� PID���ӿ����㷨,���� PSO �㷨��ȫ���Ż������ͽ�ǿ��������,�Ż� BP ������Ȩֵ,�������������Ⱥ�Ż��㷨��ȫ��������,��������÷����ܹ��Ż�ϵͳ�Ķ�̬����,����ϵͳ��̬���.
����2. ������:ͨ����������ŵ��(Lyapunov)����Ӧ�ɽ��,�ۺϿ��ǿ�����,����ʹ������ϵͳ�Ķ���̬��������������Ҫ��.����[47]�����һ���µ��˶�����ϵͳ����Ӧ���ַ��������㷨.��ͬ�ڴ�ͳ����Ʒ���,����������״̬��ʽ�غϲ������ Lyapunov ������,�������Եؼ��� Lyapunov ������ʱ�䵼��,�Ӷ��õ�����������ṹ�IJ������Ƹ��¹���.�������,�ջ����ϵͳ������ʱ���,�������±���Ϊ����-�����Լ���ϵͳ,����ƶ�ϵͳ�����仯����³����.
����3. ����Ӧ����:��Ծ��в�ȷ���Ե�ϵͳ��Ϊ���ƶ���,����Ӧ����ͨ�������Щ�۴��ڵĸ�ʽ��ȷ����,ͨ�������Ӧ�Ŀ�������,���ﵽijһ����ָ��.Ϊ����������ȶ�ƽ̨�ĸ�������,����[48]�����һ�ֻ���������ͽ����Ŷ��۲���������Ӧ�������Ŷ��������Ʒ���.���ý����Ŷ��۲���ֱ�Ӷ��Ŷ����й���,Ȼ����������Բ����仯�Ͳ�����������Ĺ����Ŷ������бƽ�,Ϊ����������Ҹ���,������λ������������Ŀ�������,���� Lyapunov �оݷ����˸÷������ȶ���,ʵ���������˸ÿ��Ʒ�������Ч��.
����1.4 �����о�����Ҫ���ݼ��½ڰ���
��������ͨ�����۷�����ʵ���о�������,��ɶ����Ṥҵ��е���˶�����ϵͳ�������ʵ��,�漰��е���˶�����ϵͳӲ�����,����ϵͳ�������,�Լ������㷨���о���.
������һ��:����,����ͨ���ܽᵱǰ��е�ۿ���ϵͳ�����ⷢչ��״,�ֱ������˻����˿���ϵͳ�ṹ�������˿�������ơ��������˿����㷨�ȵķ�չ���,�����˱����о��ı�������Ҫ���ݼ������о�����.
�����ڶ���:����ϵͳ��������Ʒ���,ͨ���Ի�е�ۿ���ϵͳ��������,�ܽ����������Ĵ�����,ȷ������оƬѡ��,��θ�������ϵͳ�ܹ���Ʒ���,��ϵͳ�����������������з���,���ո�����е���������̵����˼·.
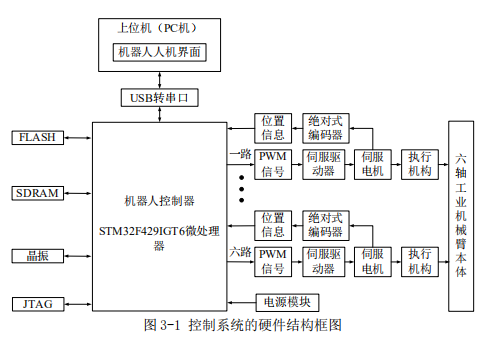
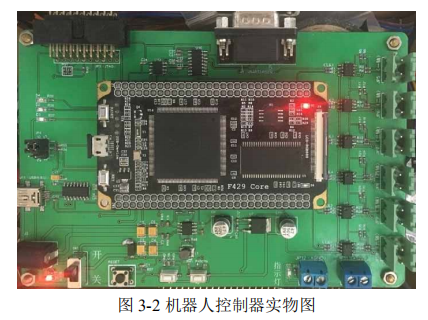
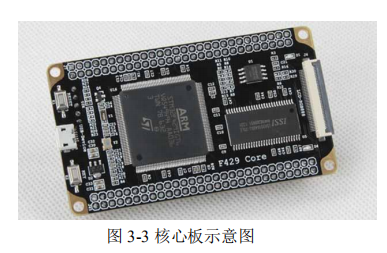
����������:��е���˶�����ϵͳ���,ͨ����������Ի�е���˶�����ϵͳ��ƽ�������.��һΪ��е�ۿ���ϵͳ��Ӳ��ϵͳ���,���� STM32F429 Ƕ��ʽоƬ,����˻���"PC+STM32"����������ϵ�ṹ�Ļ����˿���ϵͳ;���Ϊ��е�ۿ���ϵͳ�������,ͨ�� Keil uVision5 ��д�����˿������ĵײ���������,���� VisualC++��д��������λ����������,��������˸�����ģ�����Ʒ�����˼·,��������ϸ����������.
����������:��е���˶��滮������㷨�о�,���½���Ҫ��Ϊ�����ֽ��в���,��һ�����������ժ��е��Ϊ�о�����,����˲�ժ��е���˶��滮�㷨;�ڶ������Ե����е��Ϊ���ض���,�о��˵����е�۵�λ�ÿ����㷨.
����������:����ϵͳ���ܲ���������,��������ƵĻ�е���˶�����ϵͳ,����ϵͳ����Ӳ���������������.
����������:�ܽ���չ��,����������Ĺ���չ���˷���,ָ���˿����еIJ���,���Կ����һ���Ĺ�������չ��.

����…………���ڱ���ƪ���ϳ�,��������ʡ��,��ϸȫ�ļ���ĩ����
���������� �ܽ���չ��
����6.1 �����ܽ�
���������������С�ͼӹ�������ҵ�����õĹ�ҵ��е���˶�����ϵͳ�������,ϵͳ�ṹ�������ӿ��Ʒ�ʽ,�ṹ���������ʵ��,��Ƚϴ�ͳ�ļ���ʽϵͳ�ṹ,ϵͳ��ʵʱ�ԡ��ɿ��Դ��������.�����о��˻�е���˶��滮�㷨�Ϳ����㷨,��������е����ҵ���ȶ��ԡ��ɿ���,�Լ����ͻ�е�۵�λ�ÿ�������,������Ҫ������.
�������ĵ���Ҫ������������:
����(1)�����˽�����˷�չ�ı�������չ����,��Ϥ��е�ۿ���ϵͳ����ɽṹ������ģ��,ȷ��ϵͳ��Ƶķ��������˼·������.��ϱ��ο����е���˶�����ϵͳ��Ƶ�ʵ�������Ҫ��,ϵͳ����"PC+STM32"����������ϵ�ṹ�������,һ������Ч�ؽ�ϵͳ�Ĺ��ܷ���,ʹ��ϵͳ����ṹ����ģ�黯���˼·,��ǿ��ϵͳ�Ŀɿ���;��һ����������ƵĻ��� STM32 Ƕ��ʽ������,����ڴ�ͳ�����˶����ƿ���PLC �ȿ���������,���гɱ��͡��ȶ��Ժõ�����.
����(2)�����˿����������,���� STM32 ��������Ϊ�����˿�����������оƬ,��������Ҫ��������ͨ��ģ�顢�ŷ�������Ԫ������������ģ���.�����˲��� PC ��Ϊ��λ��������,PC ���ṩ��ǿ���������������,�����ڿ���.���� KeiluVision5 ������дϵͳ����������,ͨ�� Visual C++���ϵͳ����λ����������,����,���� PID �����㷨���л����˵�λ�ÿ���,���ͻ�������ҵ�����.
����(3)���,�����Բ�ժ��е����Ϊ����,����ؽ��ٶ������Ļ�е���˶��滮�㷨,����˻�е�������л��������ٶ��������������ۻ�������.�ڴ�ͳ�ķ������Ļ����ϼ�����չ,��������Ӧ�������ڻ�е��λ�ø��ٿ�����,������֤������нϺõĸ�������.
����6.2 ����չ��
��������ǰ�ڹ����춨�����õĻ�е�ۿ���ϵͳ��ƻ���,��Ҫ�ڻ�е�ۿ���ϵͳ����е���˶��滮�������㷨�������˴����о�����,��˹�ҵ��е���˶�����ϵͳʵ��ƽ̨,���ڿ����漰���,�����������ź�.�ڽ��Ĺ����������·�����о�����:
����(1)���IJ���"PC+STM32"�����������ܹ��Ļ����˿���ϵͳ,����Ч�ؽ�ϵͳ���ܷ���,����ʹ��ϵͳ�Ľṹ������ģ�黯�����˼·,�����ǿ��ϵͳ�Ŀɿ��ԡ���չ��.���ǻ��ڶ����������ܹ��Ŀ���ϵͳ,���ڻ�ø�Ч���㼰�������ܵ�ͬʱ,Ҳ�����˿���ϵͳ�ı�Я��.��֮��Ĺ�����,�ֲ�ʽ�ṹ������ϵͳ�������豸����Ч��,��δ�����ܹ����а�����Ҫ�Ľ�ɫ.
����(2)������ƵĻ�е���˶�����ϵͳ,���ڴ�ͳ���Ի�е��,һ����ṹ�����Ҵ���,��ξ��ܰ���Ĵ������Լ����ӵĿ���,ʹ�����еĻ�е�ۻ�е�ִ��ڹ��ܵ�һ����ҵ��Χ���ޡ�ʹ�ü�ά���ɱ���.���Ի�е�۽ṹ��ࡢ��Ӧ����ǿ,����ڸ��Ի�����,���Ի������ֱ۵��������ڵͳɱ�,�ܹ��ܺõ���Ӧ����,��������ĸ���С,�ܹ����˺��������.
����(3)��е���˶��滮�㷨�������㷨�о�,һֱ�ǻ����˼������о��ȵ�.����������֪,��е����绷���ı任,��������ɻ�е��ĩ�����е����,��ͳ�Ŀ����㷨,Ҫ��������ȷ����ѧģ��,�������Ӧ�����˿��Ƽ����ķ�չ,���͵Ŀ����㷨������ʵ������Ծ�ȷģ�͵�����,���зdz��õķ�չǰ��.
������ л
����ʱ������,�����,��֪������,�Ѿ��ȹ����о��������ѧϰ����������.������,�ڹ����Ƽ���ѧ���Ŷ���ʵ��ѧϰ����,�̻�����ʵ�õ�����֪ʶ,�������Ҽ�����Ը�,�������ҹ�����������̨.ĸУ��"�������,��������"��������,���Ƕ���������֪ʫ�顢��������ѧ.
��������,��Ҫ��л�ҵĵ�ʦ���ګ������,��������ƵĻ�е�ۿ���ϵͳ��������ʦ��Ϥ��ָ���Ͱ�������ɵ�.��������,����ʦ��ѧϰ�С������ϸ�������Ī��İ���,����ʦ�Ͻ���ѧ��̬��,ĬĬ���ŵ����·��,���Dz�������ĬĬ������,��ѧ���Ϳ��еĵ�·��,Ϊ�������������õİ���.���ͬʱ,��Ҫ��лͬʵ���ҵĴ�ϲ����ʦ,�ڿ��չ�и������ұ���Ľ�������.��л���뱾�����������������ר����ʦ��,ֻ������ʦ�Ķضؽ̻�,���ǵ�����֮·���ܵ���һ�δεؿ���.
�������,��Ҫ��лͬʵ���ҵ�ʦ��ʦ��,��ѧϰ�ĵ�·��,�����Һܶ౦������;��лʵ���ҵ�������Ա,��л����ÿ�쳯Ϧ�빲,��ѧϰ��·��ʼ���������,��л����õ�ʱ����������õ�����.
�������,��Ҫ��л�ҵĸ�ĸ.�ɵ��β�,����֮��,����֮��,����Ϊ��.�dz���л�������ҵı���ĬĬ�ķ�����,��Ϊ����ѧ֮·�ļ�ǿ���.
�������Դ��������Ĺ��������ҵ���,��л���ǵĸ���!
�����
[1] ������,֣ ��,Ԭ ��,��.���ڹ�ҵ 4.0 �����µĹ�ҵ�������˲��о��������������[J].��ֵ����,2017, 36(24):171~174
[2] Martin H. Double-digit growth highlights a boom in robotics[J]. IEEE Robotics & AutomationMagazine, 2017, 24(1): 12~14
[3] ����ϼ,�� ��,������.���ڹ�ҵ�����˼����Ĺ�ҵ 4.0 �˲�����̽��[J]. �칫�Զ���,2017,22(24):32~34
[4] Moura F M, Silva M F. Application for automatic programming of palletizing robots[C]. 2018 IEEEInternational Conference on Autonomous Robot, 2018: 48~53
[5] ��Ǭ��,������,������,��. һ���ƶ���Ϳ�����˵ĸ�Чվλ�Ż�����[J]. ������,2017,39(2):249~256
[6] ֣����,������,�첩�X,��. ����Ƕ��ʽ���ӻ����˿���ϵͳ���[J]. ��ϻ������Զ����ӹ�����,2017(1):89~91
[7] Raj V, Raghavan P, Rajesh R, et al. Design of dual purpose cleaning robot[J]. 2018, 133: 518~525
[8] L Z, Wu J, Wang D. An engineering-oriented motion accuracy fluctuation suppression method of a hybrid spray-painting robot considering dynamics[J]. Mechanism and Machine Theory, 2019, 131:62~74
[9] ������,�ű�ΰ,�����.���� STM32 �ּ���˻����˿���ϵͳ�����[J]. ������Ӳ�������,2016, 35(9):101~104
[10] ��ѧ��.�����˿����о�[M]. ����:�㽭��ѧ������,2006
[11] ��Сͤ,���嶫,�� ��.���������ɶȹؽڻ����˵�һ�ּ��������ϵͳ[J]. 2012, 29(7):192~196
[12] �� ��,������,���,��.���ĥ���������ܿ���ϵͳ�о��뿪��[J]. ��ϻ������Զ����ӹ�����,2015(12):94~96
[13] ʩ����, �ɻ���.��ҵ�������˶�����ϵͳ���DZ������봫���������ʵ��[J]. �Զ������DZ�,2015(5):37~41
[14] ��־��.��ҵ�����˵ķ�չ��״����չ����[J]. װ�����켼��, 2015(3):166~168
[15] ��С��,������,���ٿ�,��.���������ܻ��о��Ĺؼ������뷢չչ��[J]. ��е���,2016(8):1~7
[16] �й�����ѧ��.�й������˲�ҵ��չ����(2018 ��)[R],2018
[17] ÷��ƽ,�� ��.һ���������װ��ĩ��ִ���������[J]. �ִ����칤��, 2014(5):27~30
[18] Jay L, Hossein D, Jaskaran S, et al. Industrial artificial intelligence for industry 4.0-based manufacturing systems[J]. Manufacturing Letters, 2018(18): 20~23
[19] Raza K, Khan T A, Abbas N. Kinematic analysis and geometrical improvement of an industrial robotic arm[J]. Journal of King Saud University - Engineering Sciences, 2018, 30(3): 218~223
[20] лʤǿ,�� ��.��ҵ�����˲�ҵ��չ��ʷ��δ�����Ƶ���������[C]. ������̳-��ҵ���������봴��ѧ�����ֻ�,2016:80
[21] ������,���Ǻ�. ȫ��ҵ�����˷�չʷ����[J]. ��е����,2017, 25(7):7~10
[22] �� ��,̷ ��. �����˿���������״��չ��[J]. ������,1999(1):75~80
[23] ������. ���Ṥҵ�����˿���ϵͳ̽��[J]. �й��¼����²�Ʒ,2016(6):1~2
[24] ������,�� ��,��֪��. ���Ẹ���������˶������������[J]. ��е���������,2015(10):168~171
[25] Chen L, Wu Y, Du Z, et al. Development of an Industrial Robot Controller with Open Architecture[C]. 2017 IEEE 8th International Conference on CIS & RAM, 2017: 754~757
[26] L Ding, Li E,Z Liang. A novel kinematic calibration method for a handling robot based on optimal trajectory planning[C]. IEEE International Conference on Robotics & Biomimetic, 2016: 927~932
[27] ��ռ��,�Ե°�,�� ΰ,��.���ڹ�ҵ PC ���Ĺ�����ժ�����˿���ϵͳ���[J]. ��е���������, 2010(6):142~144
[28] �����,������,�߽���,��.�����ɶ����ذ��˻����˿���ϵͳ���[J]. ������Һѹ,2017,45(3):14~18
[29] ������.���������˷ֲ�ʽ�ṹ���˶��滮[D]. ����:����������ѧ,1998
[30] ���Ƿ�,�� �,�� ��,��. ���� CAN �ķֲ�ʽ�����˿���ϵͳ���[J]. ������ƹ���,2017,25(14):148~151
[31] Ford W E. What is an open architecture robot controller?[C]. IEEE International Symposium on Intelligent Control, 1994: 27~32
[32] Zhou X, Li W, Li Q. A new robot control system with open architecture[J]. International Conference on Advanced Robotics, 1997: 813~818
[33] �䴫��. ���� PC+DSP ģʽ�Ŀ���ʽ�����˿���ϵͳ����Ӧ���о�[D]. ����:�㽭��ѧ,2002
[34] �� ��. �ƹϲ�ժ�������˶��滮�����ϵͳ�о�[D]. ����:�㽭��ҵ��ѧ,2010
[35] Hong K S, Kim J G, Huh C D, et al. A PC-based open robot control system: PC-ORC[C]. IEEE International Symposium on Industrial Electronics, 2001: 1901~1906
[36] �� ��. ���� PC �Ĺ�ҵ�����������Զ��������ϵͳ[D]. �Ͼ�:�Ͼ����պ����ѧ,2012
[37] ������,���,������,��. ���� PC �IJ������������������ϵͳ�о�[J]. �������Ϣ, 2009(13):76~77
[38] ʩ����. ���Ṥҵ�����˿���ϵͳ���о���ʵ��[D]. �人:�人�Ƽ���ѧ,2015
[39] ���Ķ�,·����. ���� IPC ���˶����ƿ��Ļ������˶�����ϵͳ[J]. ��ؼ���,2015, 34(7): 74~77
[40] ������. ���� STM32F4 �����������˶��������о�[D]. �Ϻ�:�Ϻ���ͨ��ѧ,2015
[41] Cho J U, Le Q N, Jeon J W. An FPGA-based multiple-axis motion control chip[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 856~870
[42] Seok S, Hyun D J, Park S I, et al. A highly parallelized control system platform architecture using multicore CPU and FPGA for Multi-DoF robots[C]. 2014 IEEE International Conference on Robotics and Automation (ICRA), 2014: 5414~5419
[43] ������,Ҷ����,�� ˸. ������α任����Ļ����˹켣�滮����[J]. ��ϻ������Զ����ӹ�����,2014(1):5~9
[44] Buschhaus A, Krusemark S, Karlidag E, et al. Universal fine interpolation algorithms for accuracy improvements of industrial robots[C]. IEEE International Congress on Ultra Modern Telecommunications & Control Systems & Workshops, 2016: 356~362
[45] Jiang J, Cao S, Dai Y. Research on RBF neural network model compensation and adaptive control of robot manipulators[C]. IEEE Control & Decision Conference, 2016: 516~520
[46] Yuan J,Wang R,Jiang Li. Research on neural network PID adaptive control with industrial welding robot in multi-degree of freedom[J].Electronic & Automation Control Conference, 2016: 280~284
[47] Yu J T, Chang J. A new adaptive backstepping control algorithm for motion control systems-an implicit and symbolic computation approach[J]. International Journal of Adaptive Control & Signal Processing, 2003, 17(1): 19~32
[48] Fang J C, Yin R. An adaptive nonlinear control for gyro stabilized platform based on neural networks and disturbance observer[J]. Math Probl Eng, 2014: 1~9
[49] Liao Y H, Li D K, Tang G J. Translational zero-disturbance curve and its application to zero-disturbance motion planning of space manipulator system[J]. Science China Technological Sciences, 2011, 54(5): 1234~1239
[50] Satish C V, Voruganti H K. Trajectory planning of redundant manipulators moving along constrained path and avoiding obstacles[J]. Procedia Computer Science, 2018(133): 627~634
[51] Elias K X. Time-optimal trajectory planning for hyper-redundant manipulators in 3D workspaces[J]. Robotics and Computer-Integrated Manufacturing, 2018(50): 286~298
[52] Liu L, Chen C, Zhao X, et al. Smooth trajectory planning for a parallel manipulator with joint friction and jerk constraints[J]. International Journal of Control, Automation and Systems, 2016,14(4): 1022~1036
[53] Li H, Li C, Xu L. Fresh tea picking robot based on DSP[J]. International Federation for Informatio Processing, 2014: 486~496
[54] Cho J U, Le Q N, Jeon J W. An FPGA-Based multiple-axis motion control chip[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 856~870
[55] Joki D, Lubura S D. Comparative Analysis of the Controllers for PUMA 560 Robot[J].IFAC-PapersOnLine, 2016, 49(25): 98-103
[56] Lentin Joseph ��, ������,֣˼��,�� ��,����. ������ϵͳ���������[M]. ����:��е��ҵ������,2017
[57] �� ��. ��������˻�е�ۼ�����ϵͳ�о�[D]. ����:������ѧ,2017
[58] ���·�, ��ΰ, ������, et al. ���� STM32 ���ŷ��������ϵͳ���[J]. ��ҵ���Ƽ����,2017(2): 63~64
[59] Li Kene, Zhang Yunong. Design and implementation of a zero-initial-velocity self-motion scheme on a six-DOF planar robot manipulator[J]. Industrial Robot, 2012, 39(4): 401~411
[60] Gao Guanbin, Sun Guoqing. Na Jing, et al. Structural parameter identification for 6 DOF industrial robots[J]. Mechanical Systems and Signal Processing, 2017(8): 1~11
[61] ����ǿ,���ɹ�,������,��.��е��ʱ���������������켣�滮�㷨[J]. ��е����ѧ��,2010,46(3): 47~52
[62] Wang J, Li Y, Zhao A X. Inverse kinematics and control of a 7-DOF redundant manipulator based on the closed-loop algorithm[J]. International Journal of Advanced Robotic Systems, 2011, 7(4):1~9
[63] Xiao L, Zhang Y. Solving time-varying inverse kinematics problem of wheeled mobile manipulators using Zhang neural network with exponential convergence[J],Nonlinear Dynamics,2014, 76 (2): 1543~1559
[64] Zhang L, Wang Y, Yang Q, et al. Kinematics and trajectory planning of a cucumber harvesting robot manipulator[J]. International Journal of Agricultural & Biological Engineering, 2009, 2(1): 1~7
[65] �ΰ���,��ƽԪ,�� ϲ. ����α��������е���˶����Ƶ��Ż�����[J]. ��Ϣ�����,2013,42(5):645~651
[66] �ߺ�, ����·, ��С��, et al. ��е�۾��Զ�λ���ȱ궨�ؼ���������[J]. �����Ӧ���о�,2017(09): 16~22
[67] ���, ���ĺ�, ����. ���ڿռ��ֵ�Ĺ�ҵ�����˾��Ȳ�����������������[J]. ��е����ѧ��,2013, 49(3): 42~48
[68] Mahmoodabadi M J, Maafi R A, Taherkhorsandi M. An optimal adaptive robust PID controller subject to fuzzy rules and sliding modes for MIMO uncertain chaotic systems[J]. Applied Soft
Computing, 2016(52): 1191~1199
[69] Deng W, Yao J. Adaptive integral robust control and application to electromechanical servo systems[J]. ISA Transactions, 2017(67): 256~265
[70] Lyshevski, Edward S. Control of high-precision direct-drive mechatronic servos: tracking control with adaptive friction estimation and compensation[J]. Mechatronics, 2017(43): 1~5
[71] �� ��,�� ƽ. ���� SimMechanics ��е������Ӧģ�� PID ���Ʒ����о�[J]. ũҵװ���복������,2017, 55(12):41~44
[72] Wu Y, Jiang H, Zou M. The research on fuzzy PID control of the permanent magnet linear synchronous motor[J]. Physics Procedia, 2012(24): 1311~1318
[73] Fengfa Y, Xingfei L. Robust adaptive integral backstepping control for opto-electronic tracking system based on modified LuGre friction model[J]. ISA Transactions, 2018(80): 312~321
[74] ���㴺. ����Ӧ�۲�������пɵ�������ѡ��[J]. �ִ��״�, 1991(6): 102~106