24Сʱ���Ķ�������
24Сʱ���Ķ�������
����ժ Ҫ
�������Ź�ҵ��������̶ȵ�����,���˻�����Խ��Խ���Ӧ�����ִ���ҵ������.�ڽ����߲�������ҵ��,�����վ������߲ĵĹ����ֵİ��˹���Ҳ��չ���Զ����������о�.������ʵ��������,���߹����ֵİ��˴�������ͨ���˻��������г̡����ء���λȷ�ʵȲ�����ץȡ����Ҫ�����˹����˵���״,ʹ����ҵ���˹��ɱ�����������Ч�ʽ���.Ϊ���������������й����ְ��˵��Զ��������ܻ��̶�,ʵ��������Ч,������Ҫͨ�������Ӿ�������� PLC ���Ʒ� ʽ,�о��˻��ڻ����Ӿ��Ĺ������Զ������豸�Ļ�е�ֿ���ϵͳ,����Ҫ��������:
����(1)�Թ����ְ���ϵͳ��������о�:�����˹����ֵİ��˹���,���ݹ����ְ��˵Ļ�е�ֵ��������,����������ʽΪ����İ��˻�е�ֽṹ,����ĩ��ִ������������ѧ����,��֤�������.���Ӿ�ϵͳ�����,��ͼ��ɼ�װ�õ���ҪӲ������ѡ��;ͬʱ,�� PLC ����ϵͳ����жԺ��Ŀ���������ѡ��,���������Ӿ�ϵͳ�� PLC ����ϵͳ��������Ʋ���.���� AGV ���о��ȵ�Ҫ��,�����ͻ���� AGV �Ŀ����������������̽��,�������˹켣���ٵ���ֵ����.
����(2)���Ӿ�ϵͳ�й�����Ŀ���ʶ���붨λ�����о�:ͨ�����������ģ�͵ķ���,����������궨,ͬʱ������۹�ϵ�õ���е����ץȡĿ�깤���ֵĹ��������漰������ת����ϵ.ͨ��ʵ�ʶԱ�ȷ��������ͼ��Ĵ�������,������̬ѧ������ý�Ϊ����Ĺ���������ͼ��.ͨ���Աȷ��� Hu �ط���,�����һ�ֻ���ֱ����������ȡ����������ֱ����ϵ��㷨��ʵ�ֶԹ�����ͼ��ʵ���������ĵ�Ķ�λ,������ת����ϵ,ȷ�������ֵ���ʵ����.
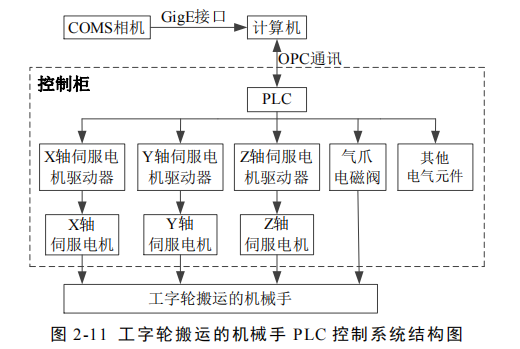
����(3)�Թ����ְ��˵Ļ�е���˶�����ϵͳ�����о�:ͨ���Ŵ��㷨�Թ����ְ��˵Ļ�е�ֽ���·���滮,ȷ���˹����ֵİ��˴���.ͨ������ϵͳ�Ŀ���Ҫ��,ȷ���˹����ְ��˵Ļ�е�ֵĶ�������,����Ӳ����·���ֽ��������,ͬʱʹ��˳����Ʒ���� PLC ���Ƴ���.ͨ������λ���Ĺ��ܽ��з���,����ģ�黯����������˻�����,ʵ�ֿ���ϵͳ�Ŀ��ӻ�����.��ϵͳͨѶ��,����OPC ͨ�ż��������λ�����������λ�� PLC ֮������ݴ���.ͬʱ�Կ���ϵͳ�����������,��֤ϵͳ�Ŀ�����.
�����ؼ���:�����ְ���;�����Ӿ�;Ŀ��ʶ���붨λ;PLC ����ϵͳ
����Abstract
����With the deepening of industrial intelligent manufacturing, handling robotshave been used in modern industrial production more and more increasingly. Inmetal wire production enterprises, the research on automatic production of I-wheelshandling process for coiling metal wire has been carried out step by step . However,in the actual production, the handling of the winding type wheel has the currentsituation that the general handling robot is mainly unable to grasp due to insufficientstroke, load, positioning accuracy and mainly relies on manual handling, whi chcauses the labor cost of the enterprise to rise and the production efficiency todecrease. In order to improve the automation and intellectualization of I-wheelshandling in the production process and improve the production effectively. Throughmachine vision technology and PLC control mode, this paper studied themanipulator control system of I-wheels automatic handling equipment based onmachine vision. The main contents were as follows:
����(1) We studied the overall system of the I-wheel handling. The handling processof I-wheels was analyzed. According to the design requirements of I-wheelshandling manipulator, a truss-type handling manipulator structure was designed, andthe force of the end-effector was analyzed to verify its feasibility. In the part ofvisual system design, the main hardware of the image acquisition device wasselected. At the same time, the core controller was selected in the PLC controlsystem, and the software design of visual system and PLC control system wasintroduced. According to the requirement of AGV operation accuracy, the design ofAGV controller for delivery container was theoretically explored, and the numericalsimulation of trajectory tracking was carried out.
����(2) We studied the recognition and localization of the I-wheel target in visualsystem. Through the analysis of the camera imaging model, the camera calibrationwas carried out, and the coordinate transformation relationship of the manipulator inthe process of grasping the target I-wheel was obtained by combining the hand-eyerelationship. The processing method of the I-wheel image was determined by actualcomparison, and the ideal I-wheel contour image was obtained by morphologicalreprocessing. By comparing and analyzing Hu moment method, an algorithm basedon line feature points extraction and optimal line fitting was proposed to locate thecenter point of the actual contour of the I-wheel image. The real coordinate of theI-wheel was determined by coordinate transformation.
����(3) We studied the motion control system of I-wheels handling manipulator. Thegenetic algorithm was used to plan the path of the manipulator for I-wheels handling,and determined the handling order of the I-wheels. By analyzing the controlrequirements of the system, the action flow of the manipulator for I-wheels handlingwas determined, and we designed the hardware circuit. At the same time, thesequence control method was used to design the PLC control program. Through theanalysis of the functions of the upper computer, the man-machine interface wasdesigned by modularization method, which realized the visual operation of thecontrol system. In system communication, we used OPC communication technologyto complete data transmission between PC and PLC. At the same time, the overalltest of the control system verified the feasibility of the system.
����Key words: I-wheels handling; machine vision; target recognition andpositioning; PLC control system
����Ŀ ¼
������һ�� ���� .........................................................................................................1
����1.1 ��������������� ...............................................................................1
����1.1.1 ������Դ ........................................................................................1
����1.1.2 ����������� .............................................................................1
����1.2 ���ڻ����Ӿ��İ��˻����˹������о���״ ..........................................2
����1.3 �������صĹؼ������о���״.............................................................3
����1.3.1 Ŀ��ʶ���붨λ���о���״...........................................................3
����1.3.2 ��е�ֿ��Ʒ�ʽ���о���״...........................................................4
����1.4 �������Ҫ��������������ṹ.............................................................5
����1.4.1 �������Ҫ���� .............................................................................5
����1.4.2 ��������ṹ .................................................................................6
����1.5 ������..................................................................................................6
�����ڶ��� �����ְ���ϵͳ������� ........................................................................7
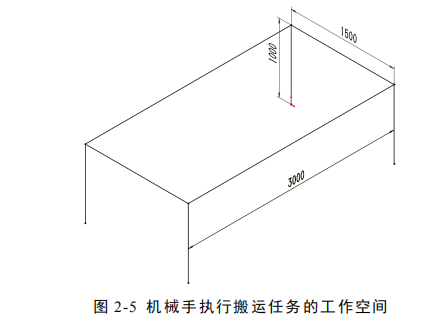
����2.1 �����ְ��˹��̵ĸ��� ...........................................................................7
����2.2 �����ְ��˵Ļ�е��������� ................................................................7
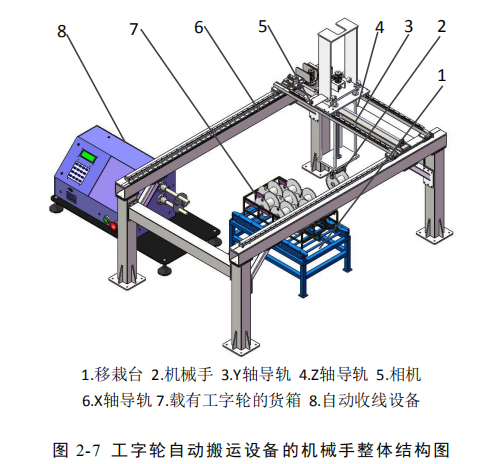
����2.3 �����ְ��˵Ļ�е��ϵͳ����ṹ��� .................................................9
����2.3.1 �����ְ��˵Ļ�е�ֱ���ṹ��� ............................................. 10
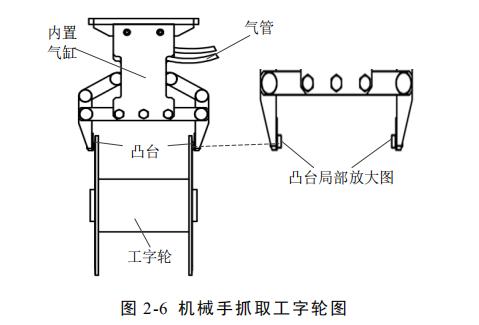
����2.3.1.1 ��е�ֵı���ṹ .............................................................. 10
����2.3.1.2 ĩ��ִ��������ѧ���� ...................................................... 11
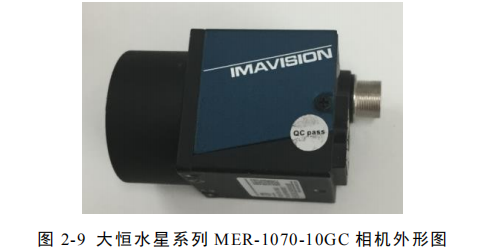
����2.3.2 �Ӿ�ϵͳ��� ............................................................................... 13
����2.3.3 PLC ����ϵͳ��� ........................................................................ 16
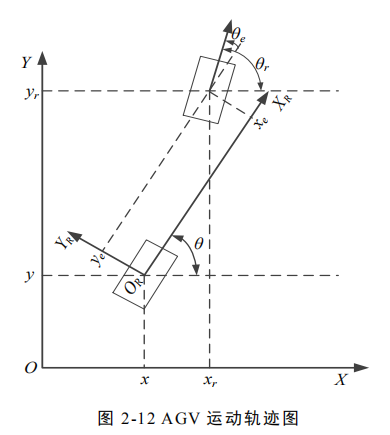
����2.4 ���ͻ���� AGV ��������� ................................................................ 17
����2.4.1 ������� ...................................................................................... 17
����2.4.2 �˶�ѧ���� .................................................................................. 17
����2.4.3 ��������Ƽ���ֵ���� ................................................................ 19
����2.5 ������................................................................................................ 22
���������� ���ڻ����Ӿ��Ĺ�����Ŀ��ʶ���붨λ ................................................ 23
����3.1 ����궨................................................................................................ 23
����3.1.1 �����ͶӰģ�� ....................................................................... 23
����3.1.2 ����Ļ���ģ�� ........................................................................... 26
����3.1.3 ����궨�ķ��� ........................................................................... 27
����3.1.4 ����궨ʵ�� ............................................................................... 28
����3.2 ���۹�ϵ................................................................................................ 29
����3.3 ͼ��Ԥ���� ............................................................................................ 30
����3.3.1 �ҶȻ����� .................................................................................. 30
����3.3.2 �˲����� ...................................................................................... 30
����3.4 ͼ��ָ�................................................................................................ 32
����3.4.1 �Ҷ���ֵ�ָ� ............................................................................... 32
����3.4.2 ֱ��ͼ��ֵ�ָ� ........................................................................... 33
����3.5 ��̬ѧ���� ............................................................................................ 33
����3.5.1 ��ѧ��̬ѧ�Ļ���˼�� ................................................................ 34
����3.5.2 ��̬ѧ�Ļ������� ....................................................................... 34
����3.5.2.1 ���ͺ�ʴ ......................................................................... 34
����3.5.2.2 ������ͱ�����.................................................................. 35
����3.5.3 ������̬ѧ�Ĺ�����ͼ����� ................................................. 35
����3.6 ������Ŀ�궨λ..................................................................................... 35
����3.6.1 ֱ����������ȡ������ֱ����� ................................................. 36
����3.6.2 Ŀ�����ĵ�ȷ��������ת��......................................................... 38
����3.7 ������................................................................................................ 38
���������� �����ְ��˵Ļ�е�ֿ���ϵͳ�����ʵ�� ............................................ 40
����4.1 ����ϵͳ����ṹ ................................................................................. 40
����4.2 �����ְ��˵Ļ�е�ֵ�·���滮........................................................... 40
����4.2.1 ������� ...................................................................................... 41
����4.2.2 �����Ŵ��㷨��·���滮 ............................................................ 41
����4.2.3 ������� ...................................................................................... 43
����4.3 PLC ����ϵͳ��� ................................................................................. 43
����4.3.1 ��е�ֶ������� ........................................................................... 43
����4.3.2 PLC Ӳ�����Ƶ�·���................................................................. 44
����4.3.3 PLC ������� ............................................................................... 47
����4.4 ��λ���˻����������� ...................................................................... 48
����4.5 ϵͳͨѶ................................................................................................ 49
����4.5.1 OPC ԭ�� ...................................................................................... 49
����4.5.2 ��λ�� PC ����λ�� PLC ��ͨѶ ................................................. 50
����4.6 ����ϵͳ�ֳ����� ................................................................................. 54
����4.7 ������................................................................................................ 56
���������� �ܽ���չ�� ............................................................................................ 57
����5.1 �ܽ� ....................................................................................................... 57
����5.2 չ�� ....................................................................................................... 58
��������� ............................................................................................................. 59
������һ�� ����
����1.1 ���������������
����1.1.1 ������Դ
������������Դ��ij����������Ʒ�豸����ҵ��Ŀ:��ϸ��˿�����߹������Զ��������������.
����1.1.2 �����������
���������ҹ����õĿ��ٷ�չ,�ҹ�����ҵҲ�������չ������,�����ڲ�ҵ�ṹ����,"�Ͷ��ܼ���"��ҵ��Ȼ����Ҫģʽ.Ŀǰ,�ҹ����˿ں�������ʧ,�Ͷ�����ԴҲ��֮�仯,���ֳ���ȱ������,ʹ���Ͷ������г������ϵ�ϲ����˾�ı仯[1].��˴�ʹ�Ͷ����ɱ�������,"�Ͷ��ܼ���"��ҵ�������ɱ�Ҳ������,��ҵ�����뷢չ���پ���ս,�ƶ���ҵ�ĸ����������Ѿ�����ü��.�ҹ�����ΪӦ��δ���Ƽ����ҵ�ľ���,�ƶ��ˡ��й����� 2025��,��Ϊ��������ҵ����ʵ����������������ǿ�����ж�����.��ǿ������������ת�͡�������������ɫ��չΪҪ��,�ӿ�����ҵʵʩ��ҵ��������Ч���ٵ��ش�ս��������ش�ٴ��ʩ,ʹ�ҹ��� 2025 ��ȷ������ǿ���������λ[2].
����������,�ҹ������߲���Ʒ��ҵ�����˿��ٷ�չ����ʱ��,�߲���Ʒ�ڲ����������϶�ȡ���˼�������,Ťת��ijЩ��Ҫ��;���߲���Ʒ�����������ڵľ���[3].����,���������Ԫ�������뷢չ,���羭������ȵ����н�Ϊȱ����������.Ϊ�����ҹ�����ƽ������ط�չ,�ƽ�������ĸ��Ǹ��и�ҵ��Ӧ��֮��.�ҹ������߲���Ʒ��ҵΪӦ�Ծ������Ƶı仯,��̭������,�����߲IJ���.����,�����ҹ��Ͷ����ɱ�������,��Ϊ"�Ͷ��ܼ���"��ҵ�еĽ����߲���ҵؽ�������ع��յĸ����������Ա�����Ч��.
������������Ϊ�վ������߲ĵ�һ�ֹ���,����˹��������ظ����Ͷ�,ͬʱ���ڹ���������ͨ��Ҳ�ϴ�,ʹ�ù��˵��Ͷ�ǿ�Ⱥܴ�,���߹����ֵİ���Ч��Ҳ�ϵ�,��ҵ������Ч����֮����.Ŀǰ,���˻����˹㷺��Ӧ���ڹ�ҵ������,�ܹ���һ���̶��Ͻ��������Ͷ����ɱ����Ƕ���ҵ��ɵ�Ӱ��,ͬʱ�ܹ���ʹ��ҵ�Ӵ�Ƽ��������ȡ��ӿ���ҵ����ת��.���Ǵ�ͳ�İ��˻����˴����ͨ���˹�����ʾ�̻����߱����ʵ�ֹ�ҵ�Զ���������,�Զ����̶Ȳ���,��������λװ�õļӹ���������˻����˵��ظ���λ���Ȳ����ϴ����ʱ,����ɰ��˻���������������.ͨ������������ѧ�����ơ��������Ӳ�����˻��ӿ��Լ�ͼ�����ȼ����ۺ��γɵĻ����Ӿ������ܹ�ʵ�־�ȷ��λ,��Ӧ�Զ�������[4]. �����Ӿ��빤ҵ�����Ľ���Ѿ���Ϊ����������ȵ�,���ִ��Ĺ�ҵ����������,�����Ӿ����������������������,�������µĹ�ҵ������ʽ,����̶ȵ�����˹�ҵ������Ч��,�������ܻ�������չ��������ش�����[5].�����Ӿ������ڹ�ҵ�����ĸ��������е������о�,�Խ�һ����߹�ҵ�������Զ��������ܻ�,�������˹������ǻ۹������ź���Ҫ������.
�������ڹ����ְ��˹��̵��о�,��������Ҫͨ�������Ӿ�����ʵ�ֹ����ֵ�ʵʱʶ���붨λ,����е���Զ���������ɹ����ֵ��Զ�����,ʹ��ϵͳ�����Ի���ǿ,����ҵ�ڽ��������ɱ���������Ч������ת�͵ȷ������һ���ļ�ֵ.
����1.2 ���ڻ����Ӿ��İ��˻����˹������о���״
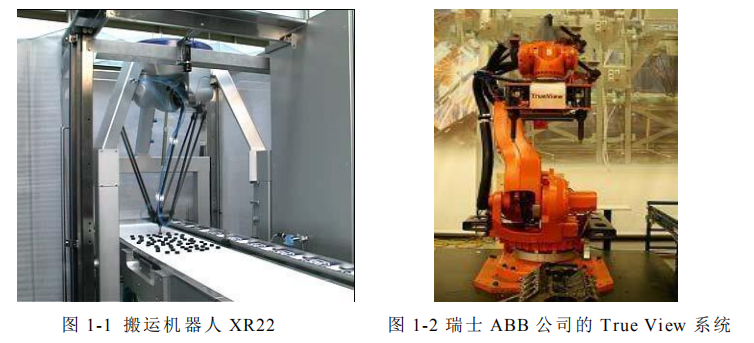
�����������Ϳ�չ�˶��ڰ��˻����˵��о�,�����Ӿ���֮���ϵ��о�Ҳ��Ӧ��ȡ���˲��ٳɹ�.1960 ��,Unimation ��˾��������˹�����ʹ��������������İ��˻����� Versatran �� Unimate [6].1973 ��,Shirai �� Inoue ͨ����һ��λ�ù̶���װ������ķ�ʽ,���Ӿ������е�ֵĿ���ϵͳ��,ʵ���˶�Ŀ��Ķ�λ,����˻�е�ֶ�Ŀ�����ز���[7].1974 ��,���� ABB ��˾�����ϰ��˷��������������ϵ�һ̨ȫ���ʽ�� IRB6 ��ҵ������[8].�˺�,��������ҵ������ٷ�չʱ��.���� ST Robotics ��˾�з��� ST ��е�ֿ���Ӧ���ڽ�Ϊ���ӵĹ�����,�ܹ����ʵ������Ʒ�Ĵ��������ϰ�������[9].��ͼ 1-1 ��ʾΪ�� ʿ SIG ��˾���Ƶ�һ�ֻ��ڻ����Ӿ����������������ϵİ��˻����� XR22,XR22 �������ܹ�����ץȡ�������ϵIJ�Ʒ,������Ʒ����ط�������Ӧ��λ����[10].��ͼ 1-2 ��ʾΪ��ʿ ABB ��˾������Ƶ� True View ϵͳ,��Ҫͨ���� ��ϵͳ��Ӳ��������ƽ̨������㷨���� ABB �����˿���ϵͳ����,�����������ͺ�λ�÷����仯ʱ,Ҳ�ܹ�ʵ�ֶ�Ŀ�깤���ľ�ȷ��λ[ 11 ].Ŀǰ TrueView ϵͳ�Ѿ�Ӧ���ڰ��˵���صĹ�ҵ������.
�����ҹ����˻����˵��з�����ڹ��ʼ����,�йػ����Ӿ��Ͱ��˻��������ϵ��о�Ҳ�Ϲ������ͺ�һЩ.�ڰ��˻����˵��з�����,���Ȫ��[12]ͨ�������е�ij������˵ĸĽ�,�����˾��� 50kg ���������� TH50 �Ͱ��˻�����.�п�Ժ�Ϸ����ʿ�ѧ�о�Ժ�Ƚ����켼���о����� 2013 �������з����ܹ�ʵ�ָ������صİ��˻�����,�����˹����ڰ��˻����˵���ؼ��������ڵ�����ˮƽ[13].��ͼ 1-3 ��ʾ,���˻����˵ı�����ò������ӵ������˻���,�ܹ������ϰٹ���,ͬʱ�����������㷨ʵ���˶��˻����˴��ڸ�������ʱ�ľ�ȷ����,�ܹ��ﵽÿСʱ 1200 ����Ʒ�İ���Ч��.�ڻ����Ӿ�����˻��������ϵķ���,������[14]ͨ�� PC �� PLC ���ϵĻ����Ӿ�������,��ƿ�������Բ���ƿʶ�������ץȡ���Զ�����ϵͳ,���нϸߵĿɿ���.��·��[15]ͨ���Ӿ��뼤���������,��ȡ��ɢ��Ƭ�������Ϣ,���Ľ��� Harris �ǵ����㷨,ʵ����ɢ��Ƭ���Զ�����,���⾫����Ч�ʽϸ�.����ΰ��[16]����о���һ�ֻ��ڻ����Ӿ��Ĺ����ּ�����˵�С�ͻ�����ϵͳ,ʵ���˲�ͬ��ɫ��ͬ�ֹ����ķּ������,ʶ���ʸ�.

������������,��������ڰ��˻����˵��о�����������,��ͬ��;����ͬ���������İ��˻�����Ӧ���ڹ�ҵ�Զ���������,�ܹ��ѹ��˴ӵ�һ���ظ����Ͷ������н�ų���,������ʵ���Ͷ�����Դ�ļ�Լ��,���������Ч��.���Ǵ�����İ��˻�����ֻ�ǽ�����ִ��Ԥ���Ķ���,��Ŀ�깤����λ�÷�ʲô�仯ʱ,����������������ȷץȡĿ��.���ڻ����Ӿ������ܹ�ʵ�ֶ�Ŀ�������Ϣ��ʵʱ��ȡ,ʹ���˻����˵����ܻ��̶ȵõ����.������չ���ڻ����Ӿ��İ��˻����˵��з���Ӧ������,�ܹ��ٽ���ҵ���������ܻ������Ի���չ,������������ķ�չ���ǻ۹����Ľ���.
����1.3 �������صĹؼ������о���״
����1.3.1 Ŀ��ʶ���붨λ���о���״
�������ż�������ܵ�����Լ����������㷨�ķ�չ,ͼ������������������.��ͼ����Ϊ���ĵĻ����Ӿ��������о���Ӧ��Ҳ�ڿ���չ��.ͼ����������Ӿ�����ָ��Ŀ��ͼ��ķ�������,ͼ������Ҫ������ͨ����ѧ�任ʵ��ͼ����Ŀ����Ϣ����ȡ,�������Ӿ����Dz�����ͨ����ͼ����Ŀ���ʶ���붨λ�����Ŀ����ά�ռ���Ϣ[17].
������ͼ����������㷨���о���,���Ŀ��ʶ���붨λ�����۷�����ȡ�úܶ��о��ɹ�.Yu-Lan Z[18]�����һ�ֻ���Ŀ������ͬ��Ŀ���뱳��֮��һάƽ���ҶȾ��Բ����ֵ���ϵĿ���Ŀ���ⷽ��.Li L ��[19]�����һ�ֻ���Ŀ�������Ŀ���ʶ���㷨.���㷨������������ز����ԭ����Ŀ�������ʶ��.Xia G ��[20]���ʵʱϵͳ���㷨���Ӷȡ����پ��ȺͿ�����֮���ì��,�����һ���µĸĽ��ĸ�Ч�㷨.���㷨����ģ�����ƥ����ص�,ͨ�����ͷֱ���,������������Լ���㷨(SSDA)��Ŀ����ж�λ.ͬʱ,�о�������˻������Ŷ����������ģ������㷨,�����ÿ������˲��㷨��Ŀ��λ�ý��й���,�������ڵ�ʱ��Ŀ�궪ʧ��.Wang Y ��[21]ͨ������Ӧ�Ŵ��㷨�Ķ�ά Otsu �� �����ͼ��ָ�,ʵ���˻������Ӿ���Ŀ��ʶ���붨λ.Zhang H ��[22]�������ر�Ե��λ����,����ʵ��ͼ������ļ��������ͻҶȷֲ�����,�����һ�ָĽ��������ر�Ե��ȡ�㷨,Ȼ�������С���˷�ʵ�����Ķ�λ.Wang Hao ��[23]ͨ����״�ز������ͼ�Ȩŷ�Ͼ����������Ӧ�㷨�ĸĽ�,����֤�˸��㷨�Թ��յIJ�������,����ʶ����ɫ��������巽����кܴ������,���и�Ч��ȷ��³���Ժõ��ŵ�.Guan F ��[24]���� SURF �㷨��ȡ����Ŀ�����Ŀ���������,����Ŀ�������洢�����ݿ���,Ȼ����ͼ���������б���Ŀ�����ݿ��Ŀ�����ʶ��,ʵ���˶���ά��תĿ��Ͷ�Ŀ��Ŀ�����Чʶ��.
������������,Ŀ��ʶ���붨λ���㷨�о��ɹ��϶�,���ǻ��ڻ����Ӿ�������Ӧ�ó����IJ�ͬ,��Ȼ��Ҫ���һ����Ч���㷨ȥ���ʵ��������������Ŀ��ʶ���붨λ����.
����1.3.2 ��е�ֿ��Ʒ�ʽ���о���״
������е�ֵĿ��Ʒ�ʽ�����Ͽ��Է�Ϊ����:���ڼ�����Ŀ��Ʒ�ʽ�����ڵ�Ƭ�����������Ŀ��Ʒ�ʽ�Լ����� PLC �Ŀ��Ʒ�ʽ.����Ӧ������IJ�ͬ,����Ʒ�ʽҲ������ͬ.
����Hong K S ��[25]�о���һ�ֻ��ڼ�����Ŀ���ʽ��е�ֿ���ϵͳ.��ϵͳ�ɻ���������Ӧ�ó���ͼ����ƽ̨�ϵ�����Ӳ���豸���,�ܹ�ʵ�ֲ�ͬ���������µ�ϵͳ�Ż�,ͬʱ������ģ�����,�������õĿ�������.��Т�۵�[26]����˻��� STC89S52 ��Ƭ���Ļ�е�ֿ���ϵͳ,����˶�Ŀ��������Զ�����,ͬʱʵ���˶��е��Ӧ���ڰ��˹��̵���������.�콨����[27]���� ARM ��������Ϊ��е�ֵĿ��ƺ���,���������ת���Լ�λ�ÿ��Ƶ�����㷨,�����˻�е�ֵĹ켣���ٶȹ滮,ͬʱʵ���˻�е�ֵ�λ�ÿ���.����Ƽ��[28]�� PLC���������ģ����ɻ�е�ֿ���ϵͳ,���١�ȷ��ʵ���˻�е�ֵ�λ�ÿ���,��ɻ�е�ֵ����ϰ�������.��ï��[29]�Ȼ��������� S7-200 �� PLC ʵ���˶��˻����˵��Զ����ֶ�����,���гɱ������������ɿ����ŵ�.
������������,���ڼ�����Ļ�е�ֿ��Ʒ�ʽ,�������õĿ������ܡ����������ص�.���ڵ�Ƭ�����������Ļ�е�ֿ��Ʒ�ʽ,��Ӳ�������ϸ��ӵ��㷨���.���� PLC �Ļ�е�ֿ��Ʒ�ʽ,�ɿ��Խϸߡ�������չ������ʵ�ֶ�������.ͨ����Ҫ����ʵ��Ӧ�õij���,�Ի�е�ֵĿ��Ʒ�ʽ�������.
������������Ҫ���ʵ�����������߹����ֵİ��˴�������ͨ���˻��������г̡����ء���λȷ�ʵȲ�����ץȡ����Ҫ�����˹����˵���״,����û����Ӿ�������� PLC ���Ʒ�ʽ���Ƴ�һ���ܹ�ʵ�ֹ������Զ����˵Ļ�е�ֿ���ϵͳ.
����1.4 �������Ҫ��������������ṹ
����1.4.1 �������Ҫ����
������������Ҫ�о�����Ϊ���ڻ����Ӿ��Ĺ������Զ������豸�Ļ�е�ֿ���ϵͳ,��Ҫ���������ְ���ϵͳ������ơ�������Ŀ��ʶ���붨λ�Լ��˶�����ϵͳ�Ȳ���.���й����ְ���ϵͳ��Ҫ�о����˻�е�ֺ����ͻ���� AGV ������.�� AGV �������ֻ���������̨��Ӧλ�ú�,�Ӿ�ϵͳ�Ի����еĹ����ֽ���ʶ���붨λ,�����ݴ����,��ͨ�� PLC ����ϵͳ�Թ����ְ��˵Ļ�е�ֵ��˶����п���,��ɹ����ֵİ�������.�Ӿ�ϵͳ�ڹ�����Ŀ��ʶ���붨λ��������Ҫ�漰������궨��������ͼ��IJɼ���������ͼ���������ȡ��������Ŀ��Ķ�λ������ת��������,ͨ���Ӿ�ʶ���붨λ���Ի�ȡ�����ֵ�λ����Ϣ,�Թ����ֽ���ȷ��λ.���� PLC �Ĺ����ְ��˵Ļ�е�ֵ��˶�����ϵͳ��Ҫ���� PLC ����ϵͳ����λ���Լ�ϵͳͨѶ�Ȳ���,ͨ���Ӿ�ϵͳ����Ĺ�����λ����Ϣ,���ƻ�е�ֶ���,ʵ�ֹ����ֵ�ȷץȡ�����.����ľ�����������:
����(1)�����ְ���ϵͳ�������
�������������о��Ĺ����ְ���ϵͳ��Ҫ�������˻�е�ֺ����ͻ���� AGV ������.��Ϲ����ְ��˵Ļ�е�ֵ��������,���������ṹ.�������ʽ����������������Ԫ����צ��Ϊ���е����ṹ,������צ������ѧ����.��Ӿ�ϵͳ��ͼ��ɼ�װ��,�����������ͷ����ҪӲ����ѡ��.���ڹ����ְ��˵Ļ�е�ֵ��˶�����Ҫ��,����Ϊ���Ŀ������� PLC ����ѡ����������������.�������ͻ���� AGV ���о���Ҫ��,�����������̽��,�������Ҫ��Ŀ�����.
����(2)������Ŀ��ʶ���붨λ���
�������ͼ��ɼ�װ����Ҫ��������궨�Ի�ȡ��ز���,ͬʱ������۹�ϵ���Եõ�������ץȡ���������漰��������ת����ϵ.ͨ��ʵ�ʶԱ�ȷ��ͼ��ɼ�װ�òɼ����Ĺ�����ͼ��Ĵ�������,��ȡ��Ϊ����Ĺ���������ͼ��.Ȼ��Թ���������ͼ�����ֱ����������ȡ,����С���˷���ֱ����Ϸ���ȷ����������ʵ���������ĵ����������,�ٽ������ת����ϵ�õ���е������ϵ�¹�����ʵ���������ĵ������.
����(3)�����ְ��˵Ļ�е���˶�����ϵͳ���
�����Թ����ְ��˵Ļ�е�ֽ���·���滮,ȷ�������ֵİ��˴���,��ʡ�豸�Ĺ���.ͨ����ϵͳ����Ҫ��ķ���,ȷ����е�ֵĶ�������,���� I/O �˿ڲ������ַ,������ѡ�� PLC �ͺ����Ӳ����·,�������Ӧ����Ҫ��� PLC ���Ƴ������.��Ʊ����˶�����ϵͳ���Ӿ�ϵͳ���ɵ���λ������,ʵ�ֿ���ϵͳ�Ŀ��ӻ�����.ͬʱ,��ϵͳ�����ܽ��в��Բ���֤�������.
����1.4.2 ��������ṹ
�������Ĺ���Ϊ����½�,��������:
������һ������.�����˱��������Դ���о�����������,�����˻��ڻ����Ӿ��İ��˻����˵Ĺ������о���״,��ͨ�������������Ŀ��ʶ���붨λ�����Լ���е�ֿ��Ʒ�ʽ���о���״,����û����Ӿ�������� PLC ���Ʒ�ʽʵ�ֹ������Զ����˵Ļ�е�ֿ���ϵͳ���,ȷ���˿������Ҫ�о������Լ���������ṹ.
�����ڶ��¹����ְ���ϵͳ�������.���������ְ��˵Ĺ���,��Ҫ�о����˻�е�ֺ����ͻ���� AGV ������.��Ϲ����ְ��˵Ļ�е�ֵ��������,���������ṹ,���������ְ��˵Ļ�е�ֵı���ṹ���Ӿ�ϵͳ�Լ� PLC ����ϵͳ�Ȳ��ֵ����.������е�ֱ���ṹ��ɡ��Ӿ�ϵͳ��ͼ��ɼ�װ�õ�Ӳ��ѡ���Լ�����ϵͳ�к��Ŀ����� PLC Ӳ��ѡ�͵�,���������������.�������ͻ���� AGV ���о���Ҫ��,�����������̽��,�������Ҫ��Ŀ�����.
���������»��ڻ����Ӿ��Ĺ�����Ŀ��ʶ���붨λ.����ͨ�����������ģ�͵ķ���,��������궨,ͬʱ������۹�ϵ����������ϵ֮���ת����ϵ:ͨ��ͼ����������㷨�Բɼ����Ĺ�����ͼ�����������ȡ����λ������ʵ���������ĵ�,����ʵ������ת����ϵ,�õ��������ڻ�е������ϵ�µ���ʵ����.
���������¹����ְ��˵Ļ�е�ֿ���ϵͳ�����ʵ��.�Թ����ְ��˵Ļ�е�ֽ���·���滮,ȷ�������Ĺ����ֵİ��˴���.���ϵͳ�Ŀ���Ҫ��,������е�ֵĶ�������,������ѡ�� PLC �ͺ����Ӳ����·,����� PLC �������.����λ���Ĺ��ܽ��з���,�����˻��Ѻõ���λ������.���� OPC ͨ�ż������ϡ���λ������ͨѶ����,ʵ��ϵͳͨѶ.�����ϵͳ����Ӳ������ƽ̨,����ϵͳ����.
�����������ܽ���չ��.����ȫ��,�ܽ������Ҫ��ɵ�����,����������Ժ���о�����.
����1.5 ������
�������½����˻��ڻ����Ӿ��Ĺ����ְ��˵Ļ�е�ֿ���ϵͳ�з���һ�������Դ���о�����������.�����زο�����,�����˻��ڻ����Ӿ��İ��˻����˵Ĺ���������о���״.������Ŀ��ʶ���붨λ�����Լ���е�ֿ��Ʒ�ʽ����ؼ������о���״.ͬʱ�����˱��������Ҫ�����Լ����ĵ�����ṹ.

����…………���ڱ���ƪ���ϳ�,��������ʡ��,��ϸȫ�ļ���ĩ����
���������� �ܽ���չ��
����5.1 �ܽ�
�������������ʵ�����������߹����ֵİ��˴�������ͨ���˻��������г̡����ء���λȷ�ʵȲ�����ץȡ����Ҫ�����˹����˵���״,�����ؽϴ�Ĺ�������Ϊ�о�����,��������˻��ڻ����Ӿ��Ĺ������Զ������豸�Ļ�е�ֿ���ϵͳ.�ڶԹ����ְ���ϵͳ����������ƵĻ�����,����˹�����Ŀ���ʶ���붨λ,ͬʱ���� PLC ���˶�����ʵ���˹����ֵ��Զ�����.�����ֳ����Ա���,��ϵͳ�ܹ�����ʵ������.������ɵľ��������ܽ�����:
����(1)�����زο�����,�����˻��ڻ����Ӿ��İ��˻����˵Ĺ������о���״,����Ŀ��ʶ���붨λ�����Լ���е�ֿ��Ʒ�ʽ����ؼ�����״�����˷���. Ϊ��߶�λȷ��,ʵ�ֹ�ҵ���������ܻ�,���û����Ӿ�������� PLC ���Ʒ�ʽ��ƹ����ְ��˵Ļ�е�ֿ���ϵͳ.
����(2)�����˹����ֵİ��˹���,��Ҫ�о��˹����ְ���ϵͳ�Ļ�е���Լ�AGV ������.����,���ʵ�������й����ְ��˵Ļ�е�ֵ��������,��������ṹ���������.�����ʽΪ����,�������������Ԫ������צ���ɵ�ĩ��ִ����ȷ���˹����ְ��˵Ļ�е�ֱ���ṹ,������צ��������ѧ����,��֤�˿�����.�� COMS �������ͷ��Ϊ��ҪӲ��������ͼ��ɼ�װ�õ�ѡ��,��ʹ��C#������Ժ� HALCON ͼ������̬���ӿ���������ͼ��ɼ��봦��ģ��,ʵ�ֶԲɼ����Ĺ�����ͼ��Ĵ���.ѡ�� SIEMENS S7-1200 ϵ�� PLC Ϊ���Ŀ������Թ����ְ��˵Ļ�е�ֽ����˶�����,��ʹ�� TIA Portal ���������� PLC����ı�д.���,������ͻ���� AGV ���о��ȵ�Ҫ��,��������������������̽��,�������˹켣���ٵ���ֵ����,�����������ƵĿ������ܹ�����Ҫ��.
����(3)ͨ��������궨�����漰�������ѧģ�͵ķ���,������ HALCON ��������˱궨ʵ��,���������۹�ϵ�õ���е����ץȡĿ�깤���ֵĹ��������漰������ת����ϵ.ͨ��ʵ�ʶԱ�ȷ���˹�����ͼ��ҶȻ����˲�����ֵ�ָ�ȵĴ�������,�ٽ����̬ѧ�������̻���˽�Ϊ����Ĺ���������ͼ��.ͨ������ Hu �ط�����λ�����ֵ��ŵ���ȱ��,�����һ�ֻ���ֱ����������ȡ����������ֱ����ϵķ�����ʵ�ֶԹ�����ͼ��ʵ���������ĵ�Ķ�λ.��������궨�����۹�ϵ��õ�ͼ����������ϵ���е������ϵ��ת����ϵ,ȷ�����������ĵ������ڻ�е������ϵ�µ���ʵ����,Ϊ��е��ץȡ�ṩ��ȷ��λ����Ϣ.
����(4)ͨ���Ŵ��㷨�Թ����ְ��˵Ļ�е�ֽ���·���滮,�����������İ���·��ȷ���˹����ֵİ��˴���,�Ż���ϵͳ����.ͨ���Թ����ְ��˵Ļ�е�ֵ��˶�����Ҫ��ķ���,ȷ���˻�е��ִ���������Ķ�������,����˶� PLC�� I/O �˿ڵĶ��弰��Ӧ��ַ�ķ���,����˿���ϵͳ��Ӳ����·����ͼ,ͬʱ����˳����Ʒ��� PLC ���Ƴ�����������.����ģ�黯��Ʒ���,�������λ�����˻��������.ͬʱ,ʹ�� OPC ͨѶ�����������λ�����������λ��S7-1200 PLC �����ݴ���.��˹����ְ��˵Ļ�е�ֵ���Ӳ������ƽ̨,�������ֳ����ܲ���,�����������ϵͳ�����ܿ�������ʵ����������.
����5.2 չ��
�������ĶԻ��ڻ����Ӿ��Ĺ������Զ������豸�Ļ�е�ֿ���ϵͳ�������о�,����ʵ���˹����ֵľ�ȷ��λ,����˻�е��ִ�����������˶�����.�����ڱ��ĵ��о�����,��Ȼ����������д���һ�����:
����(1)�����ͻ���� AGV ���о���,ֻ�Ƕ���������������������,����˹켣���ٿ��Ƶ���ֵ����,ʹ���������о��ȵ�Ҫ��,������ӦӲ�����ֵĿ������д���о�.
����(2)���ڻ����Ӿ���Ŀ��ʶ���붨λ�漰��е����ѧ��ͼ������Ƶȶ�ѧ������,�����漰�Ĺ�����Ŀ��ʶ���붨λ������㷨��Ȼ�ܹ��ﵽϵͳ�Ķ�λҪ��,������ʵ�������п��ܻ���ֶԾ���λ���ʹ�á�������Ⱦ���ء�����ȱ�����ص�״���Ĺ���������ȷ��λ�����,���������㷨���Ż����滹��Ҫ��һ�����о�.
����(3)����ҵ��ʵ��������,��������ƵĹ����ְ��˵Ļ�е�ֱ���ṹ��������������.����������ҵ��ع��յ��Ż�����,���Ʋ���Ҫ��λװ�õĹ����ְ��˻����˽ṹ,�ܹ�����������˹������������ս�ϵĽ��̶ܳ�,ʵ�ֶ�����ȫ���̵��Ż�.
���������
����[1]���ž�,¬�.�³�̬���й���ҵ�ṹ�Ż������Ļ����������ƽ�����[J].�㽭ѧ��,2015(06):188-193.
����[2]����.���й����� 2025������������ҵ���ܻ���չ����[J].����ѧս��,2016 (11): 261-264.
����[3]���.�ҹ��߲Ľ��������������ڻع������[N].�����������, 2018 -12-11 (A06).
����[4]�����.��ҵ��Ʒ����ȱ�ݼ���о��뿪��[D].������ͨ��ѧ,2012.
����[5]����.�����Ӿ��ڹ�ҵ������ץȡ�����е�Ӧ��[D].�й���ѧԺ�о���Ժ(�������㼼���о���),2016.
����[6]������.���ϰ����ƶ������˵��Ż����[D].�Ϸʹ�ҵ��ѧ,2017.
����[7]Shirai Y, Inoue H. Guiding a robot by visual feedback in assembling tasks[J]. Pattern Recognition, 1973, 5(2):99-108.
����[8]������.�����ɶ����������˶��켣�滮�о�[D].���ӿƼ���ѧ,2017.
����[9]Royer E, Lhuillier M, Dhome M, et al. Monocular vision or mobile robotlocalization and autonomous navigation[J]. International Journal of ComputerVision, 2007, 74(3):237-260.
����[10]Chaumette F,Malis E.2D 1/2 visual servoing: A possible solution toimage-based and position-based and position-based visual servoings[C].IEEEInternational Conference on Robotics and Automation,San Francisco,2000:630-635.
����[11]�쿭.����˫Ŀ�Ӿ��Ļ�е�ֶ�λץȡ�������о�[D].�㽭��ѧ,2018.
����[12]���Ȫ,�α���,��ٻ.TH50 ���������˶�̬����ѧ����[J].�����Ƽ���ѧѧ��,2011,33(04):504-508.
����[13]κǰ��.�����Ӿ���λ�����Ṥҵ�����˰���ϵͳ������о� [D].�Ϸʹ�ҵ��ѧ,2017.
����[14]����,�Ż�.���ڻ����Ӿ��IJ���ƿ������������ϵͳ��� [J].�DZ������봫����,2010(04):79-80+104.
����[15]��·.����ɢ�����Զ����˵��Ӿ�����ϵͳ[D].����������ѧ,2013.
����[16]����ΰ,�����,������.���ڻ����Ӿ�ʶ���С�ͻ����˷ּ����ϵͳ������[J].������Һѹ,2015,43(10):161-164.
����[17]Du J, Guo X, Wang C, et al. Three-Dimensional Reconstruction andCharacteristics Computation of Corn Ears Based on Machine Vision[J].IfipAdvances in Information & Communication Technology, 2013, 420.
����[18]Yu-Lan Z. Fast Small Offshore Target Detection Based on Object RegionCharacteristic[J].�Զ���ѧ��, 2005, 31(3):427-433.
����[19]Li L, Jia D, Chen X, et al. A fast discrete moment invariant algorithm andits application on pattern recognition[C].World Congress on Intelligent Control &Automation. IEEE, 2006.
����[20]Xia G, Xing Z. A New Algorithm for Target Recognition and Tracking forRobot Vision System[C].IEEE International Conference on Control & Automation.IEEE,2007.
����[21]Wang Y, Jiang X, Li Z. Research on the Method of Intelligent Robot VisualRecognition and Positioning[C].IEEE International Conference on Networking.IEEE, 2008.
����[22]Zhang H, Da F P, Xing D K. An Improved Algorithm for Subpixel Locationof Circle Center[C].Conference on Pattern Recognition. IEEE, 2008.
����[23]Wang Hao, Hu Xiao-rong, Fang Bao-fu, Geng Wei, Meng Fan-hui. Targetrecognition of household service robot based on shape moment invariants[P].Computer Application and System Modeling (ICCASM), 2010 InternationalConference on,2010.
����[24]Guan F, Liu X, Feng W, et al. Multi target recognition based on SURFalgorithm[C].International Congress on Image & Signal Processing. IEEE, 2013.
����[25]Hong K S, Choi K H, Kim J G, et al. A PC-based open robot control system:PC-ORC[J]. Robotics and Computer-Integrated Manufacturing, 2001,17(4):355-365.
����[26]��Т��,��ε��,�ڸ���,�¼���.���ڵ�Ƭ�����Ƶ��������˻�е�ֵ�����[J].Һѹ������,2008(08):14-15.
����[27]�콨��,�Ž�,������,����.���� ARM �Ļ�е���˶�����ϵͳ���[J].�㽭��ҵ��ѧѧ��,2014,42(03):243-248.
����[28]����Ƽ,�ų�Ӣ.���� PLC �Ĺ�ҵ��е�ֿ���ϵͳ[J].�DZ������봫����,2007(09):31-32+56.
����[29]��ï��,�ڸ���,��ѩ,������.���� S7-200 PLC �������ɶȻ�е�ֿ���ϵͳ���[J].Һѹ������,2010(08):4-5.
����[30]��˫��,ׯԲ,����,������,����.�������ʽ�ְ��Զ��ּ����������о�[J].����ҵ�Զ���,2016,38(08):111-114.
����[31]��־��,���˾�,κ�ϸյ�.��е���[M].����:������ѧ������,2011. [32]���.������� CMOS ���ϵͳ���[D].�й���ѧԺ�о���Ժ(������ѧ���ܻ�е�������о���),2014.
����[33]�ž�ƽ.���ڻ����Ӿ��� QFN оƬ������ϵͳ���[D].���ϴ�ѧ,2017.
����[34]����.���ڵ�Ŀ�Ӿ��Ĺ�����λ�������ץȡ�����о�[D].����������ѧ,2017.
����[35]����.��������ͬ��������ŷ�ϵͳ�о�[D].���������̴�ѧ,2008.
����[36]���ѱ�,�,����,��СӢ.���� S7-1200 ��ȫ�Զ�ϴ������ϵͳ�����[J].��������,2016,46(09):62-65.
����[37]�ž�,�״���.һ������ AGV ������Ԫ�ṹ��������[J].��е���������,2018(07):137-139.
����[38] ���꺮 . �� �� �� �� �� ϵ ͳ �� �� �� �� �� �� �� �� �� �� �� [D]. �Ͼ���ҵ��ѧ,2016.
����[39]����Ȼ,������.������Ŀ�꺽�����̹���[J].���������,2012,27(12):1854-1858.
����[40]������.���ڻ����Ӿ����㲿����������о�[D].���մ�ѧ, 2017.
����[41]�±���.�����Ӿ�����[M],2018,����:��ѧ��ҵ������,93-95.
����[42]�����,���ܷ�.��ͷ���估��У������[J].��ѧ����,2005,31(1):136-138.
����[43]����.������궨�������о�[D].�Ͼ�������ѧ,2014.
����[44]��ï��,���̵�,����.������Ӿ����������������[J].�Զ���ѧ��,2000,26(1):43-55.
����[45]Lin P D, Sung C K. Comparing two new camera calibration methods withtraditional pinhole calibrations[J]. Optics Express, 2007, 15(6):3012 -3022.
����[46]Habed A, Boufama B. Camera self-calibration from bivariate polynomialsderived from Kruppa's equations[J]. Pattern Recognition, 2008, 41(8): 2484-2492.
����[47]CHEN Tian-fei, MA Zi, WU Xiang. Calibration of light plane in linestructured light sensor based on active vision[J]. Optics & Precision Engineering,2012, 20(2):256-263.
����[48]�ս�.������궨�����о�[D].������ѧ,2010.
����[49]Zhang Z. A Flexible New Technique for Camera Calibration[J]. IEEETransactions on Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334.
����[50]Li Q, Li H, Gao Q. The influence of different sugars on corn starchgelatinization process with digital image analysis method[J]. Food Hydrocol loids,2015, 43:803-811.
����[51]Rousselle F, Knaus C, Zwicker M. Adaptive rendering with non -localmeans filtering[J]. ACM Transactions on Graphics, 2012, 31(6):1.
����[52]�ο�,���,�����.ͼ��ָ��㷨�о�����[J].������������ѧ,2009,31(12):58-61.
����[53]�����, ������, ƽ����. ��ѧ��̬ѧ����˼����γ�[J].������ѧѧ�� (��Ȼ��ѧ��), 2011, 41(6):1111-1116.
����[54]֣���,����,ţ����.�Ҷ���̬ѧ��ȡ�����۳�ͼ���Ե����[J].����ѧ��, 2007, 28(1):105-108.
����[55]Hassan Gehad, El-Bendary Nashwa . Retinal Blood Vessel SegmentationApproach Based on Mathematical Morphology[J]. Procedia Computer Science ,2015,65,612-622.
����[56]Chen Chao,Qin Qiming,Zhang Ning. Extraction of bridges over water fromhigh-resolution optical remote-sensing images based on mathematical morphology[J].International Journal of Remote Sensing,2014, 35 (10):3664-3682.
����[57]Arshad N, Moon K S, Kim J N. An Adaptive Moving Ship Detection andTracking Based on Edge Information & Morphological Operations[J]. Proceedingsof SPIE - The International Society for Optical Engineering, 2011, 8285.
����[58]Upraity H, Arya K V. Efficient face recognition using morphologicaloperations[C].International Conference on Industrial & Information Systems. IEEE,2015.
����[59]��ϼ.�ֻ�����������ȱ�ݻ����Ӿ�����������о� [D].�㶫��ҵ��ѧ,2017.
����[60]�ƾ�,�º�ΰ.�ƶ�������ȫ��·���滮�㷨���о�[J].�DZ������봫����,2014(12):80-83.
����[61]�ŵ�,����,ʱ��.�����Ŵ��㷨�ĺ��մ�̽������·���Ż��㷨[J].��������,2017,24(01):102-107.
����[62]�ƶػ�,����,����.���� OPC Server �����Ķ�ܹ�ҵ�����˿���ϵͳ���[J].ʵ�����о���̽��,2018,37(10):98-102.
����[63]������,��Т��,����.���� C#���ԵĹ�ҵ������� S7-1200 �� OPC ͨѶ[J].�Զ����������DZ�,2014(11):147-150+154.
����[64]������,�����.���� OPC �����Ŀ��ð�ȫ�̵����������ݲɼ�ϵͳ���[J].ú���е,2012,33(07):232-233.
����[65]��Ρ��.OPC ͨ�ż������о���Ӧ��[D].����������ѧ,2011.