24小时论文定制热线
24小时论文定制热线
摘要
随着我国果蔬的种植面积及产量不断增大,农村劳动力的减少,果蔬采摘机器人将扮演重要角色,研究通用性强、灵活性好的采摘机器人具有重要意义。
本文综述了国内外各种果蔬采摘机器人的研究现状及存在的问题,通过分析不同果蔬的形状和生产栽培方式,提出了一种新型混联采摘机械臂;根据设计变量参数,采用多点位置法,借助 CAD 技术作图绘制出模拟工作空间,通过建立尺寸优化的数学模型,再导入 MATLAB 编程得出结构尺寸优化解;对混联机械臂各部分关节设计做了详细的结构分析;对机械臂的驱动方式和传动方式分别做了对比、分析、选型,从而得到整体结构设计方案。
在机械结构设计的基础上,对混联机械臂各部分进行运动学及动力学分析,再通过 ADAMS 软件对运动学和动力学进行仿真,验证了运动学及动力学方程的正确性和驱动原件及传动原件选型的合理性、正确性,为零部件进行强度校核提供了数据依据。
在混联采摘机械臂的工作空间、运动学和动力学分析的基础上,利用遗传算法对尺寸优化模型进行优化求解;再利用有限元分析软件对机械臂关键零部件进行强度分析,最后完成样机的制作。
关键词:混联机械臂;工作空间;运动学;动力学;仿真
ABSTRACT
With the increasing planting area and output of fruits and vegetables in China, and the reduction of rural labor force, robots picking fruit and vegetable will play an important role. It is of great significance to study the picking robot with good versatility and flexibility.
bots for various fruit and vegetable at home and abroad. By analyzing the characteristics and cultivation methods of different fruits and vegetables, the paper proposes a novel hybrid harvesting manipulator. According to the parameters of the design variables and multi-point position method, the simulated workspace is drawn by the CAD technology. By establishing the mathematical model of dimension optimization, and then importing MATLAB programming, the solution of structural dimension optimization is obtained. Detailed structural analysis is made on joint design of each part of the hybrid manipulator. The driving mode and the transmissionmode of the manipulator are compared, analyzed, selected, and the overall structure design scheme is obtained.
On the basis of mechanical structure design, kinematics and dynamics of each part of the hybrid manipulator are analyzed. Then kinematics and dynamics are simulated by ADAMS software. The correctness of kinematics and dynamicsequation and the rationality and correctness of the selection of driving and transmission parts are verifled, which provides data basis for strength checking of components.
Based on the analysis of workspace, kinematics and dynamics of the hybrid picking manipulator, the size optimization model is optimized by genetic algorithm, and then the strength of key parts of the manipulator is analyzed by finite element analysis software, finally the prototype is completed.
Key words: hybrid manipulator; workspace; kinematics; dynamics; simulation
目录
第一章 绪论
1.1 课题研究意义
我国农业采摘自动化程度仍然很低,采摘方式也没有实质性改进,和传统的采摘方式一样;随着人口老龄化问题日益严重,农业劳动力的减少,劳动力成本也不断上升[1-2].另外,农业机器人以农产品作为研究工作对象,同工业机器人相比有以下特点:一是作业对象的复杂性和娇嫩性;二是作业环境的非结构性,不仅要能顺应复杂的自然环境,而且采摘机器人各方面性能必须满足要求[3];三是农民使用,简单易懂、耐磨实用、成本要低的特点要满足[4],所以致力于农用采摘机器人研究研发是非常有必要的,否则将很难全面推广普及农用采摘机器人的使用。
在我国新时代的科技创新发展的道路上,发展农用机器人这样的复杂光机电一体化的产品,正符合时代的需求。通过结合机械结构、机器人技术、视觉定位、传感器、图像处理以及人工智能等多项相关领域学科进行深入研究,具有新时代重要发展意义。
1.2 采摘机器人国内外研究现状
20 年代中期,美国最早致力于研究机器人[5],随后国外各国开始大规模投入资金,利用良好的发展条件,很快把机器人技术运用到农机领域中,尤其是美国、日本、荷兰、法国、英国等发达国家在农业机器人技术领域都有突破性研究。21 世纪以来,大量的智能机器人出现在农田中代替人类完成各类工作,这一现象推动了农业领域革命的再一次发展。而我国发展起步较晚,到七十年代中后期,国内只有少数大学和研究所进行机器人领域研究,但也取得了一些不错的成果,但由于成本太高、通用性不强、智能化程度低等诸多原因未得到广泛的商业应用。
1.2.1 国外研究现状
1.番茄采摘机器人
日本在番茄采摘机器人领域研究最早,其中最具代表性的是日本著名学者近藤直所研制的 7 自由度的番茄采摘机器人,如图 1-1 所示。该设备由末端执行器、机械臂、双目视觉传感器以及移动机构组成,该采摘机器人在稳定工作过程中每分钟采摘 8 个果实,成功率接近 60%,但是在采摘比较茂密的果实处就无法完成采摘,避障定位并不太理想[6].

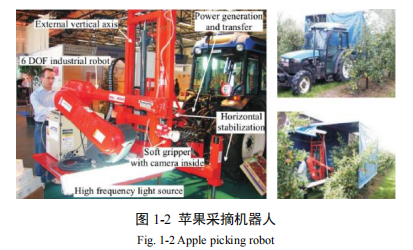
2.苹果采摘机器人
比利时 Johan Baeten 等研制出了一种 6 自由度苹果采摘机器人,如图 1-2 所 示。该机器人运用液压升降装置,机械臂可以上下移动,扩大了工作范围,并采用拖拉机作为辅助移动装备、采用柔性的末端执行器降低对果实的损伤。通过测试,采摘速度 8-10s/个、成功率约为 80%,但由于体型庞大,不能够灵活工作[7].
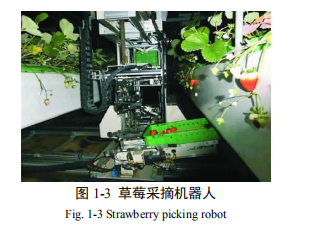
3.草莓采摘机器人
日本研制的 3 自由度草莓采摘机器人,如图 1-3 所示。在极坐标机械手的基础上增加了末端执行器、移动平台和视觉系统,该机器采摘收获成功率较低,只有 54.9% [8-9].
4.柑橘采摘机器人
美国 Energid 公司研制的柑橘采摘机器人,如图 1-4 所示。该机械臂采摘机构的延伸部分没有执行器和传感器,使其坚固耐用,易于制造,易于更换,而且成本较低,与人工采摘成本相当;该机械臂采用电机和气动驱动,使用便携式发电机和空气压缩机在佛罗里达州的橘子林进行了测试,实验表明,采摘速度每秒 2~3 个,采摘成功率 50%,采摘完全率 80%[10].


佛罗里达大学研制的 7 个自由度的柑橘采摘机器人,如图 1-5 所示。为提高视觉识别能力,采用双摄像头,分别安装在末端执行器的中心位置和固定位置,随机械手移动,从而提高采摘效率和成功率。测试结果,采摘成功率达到 95%,但该机构只适用于大中型品种的柑橘采摘[11].
1.2.2 国内研究现状
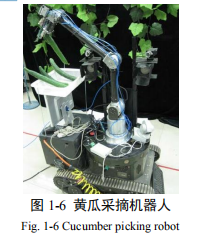
1.黄瓜采摘机器人
中国农业大学与浙江工业大学联合研制了一种 4 自由度黄瓜采摘机器人,如图 1-6 所示。该机械手结构紧凑、重量轻,采用基于 DSP 的上位机运动控制器+CAN 总线+下位机 DSP 关节控制器的分布控制方案[12].研究表明,采摘成功率为 86%、速度 18s/个。
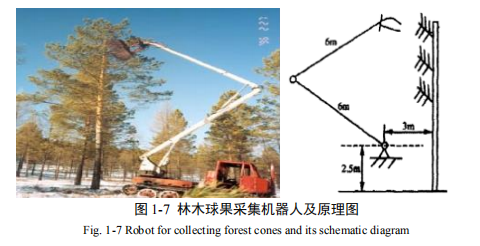
2.林木球果采摘机器人
东北林业大学陆怀明研制了 5 自由度林木球果采摘机器人[13-14],如图 1-7 所示。采摘时,机器人距离母树 3~5m 处,操作机械手回转马达对准目标果树,然后单片机控制系统操控机械大、小臂和机械爪完成采摘并按原路返回完成一整套动作。实验表明,其效率为 500kg/天,是人工的 30~35 倍,并对母树的损伤较少。
3.水果采摘机器人
南京农业大学研制的水果采摘机器人,如图 1-8 所示。该机器人由智能移动平台、机械臂、传感系统和图像处理系统组成,机械臂选用 Motoman-SSF2000型工业六自由度机械臂,在各种工作环境的条件下测试表明,采摘成功率为37.5%~46.67%、速度 9.5s/个[15]

1.3 采摘机器人存在问题和发展趋势
1.3.1 存在问题
1.机构笨重,能耗高:大多数采摘机器人采用工业机器人的结构,结构笨重,不灵活、且惯性大,能耗高,难以适应复杂的农业环境;2.通用性能差:大多数采摘机器人只能单一的用于一种或几种采摘对象;3.局限性大:大多数采摘机器人的工作空间不能随着采摘对象的变化而改变,不能适应多样性需求;4.成本高:采用工业机器人的机构、结构设计的笨重导致成本过高,通用性能单一导致机器使用周期缩短,从而提高成本,不能满足农业需求,难以推广和商业化生产。
1.3.2 发展趋势
随着农业的发展,国内对果蔬采摘的质量和数量要求越来越高,采摘机器人的发展趋势主要表现在以下几个方面:
1.成本低,机构简单;
2.通用性好、结构灵活:采摘机器人使用时间短、间隔周期长,所以满足在不同的工作环境中对不同的作业对象完成精确的工作任务,达到一机多能的目的,来延长使用周期;
3.工作高效化:现阶段采摘机器人的采摘效率低于人工作业,并且路障多、果树易受损,这些都会增加机器识别和决策的时间,因此机构的设计尤为重要;
4.人工智能技术:可以说采摘机器人的发展关键就是智能化程度,机器对工作的认知不仅依赖硬件系统的技术突破,更要结合先进的智能算法[16].
1.4 课题研究内容和方法
1.4.1 研究内容
本文主要以农业采摘目标及其生长环境和采摘环境的分析为数据依据,对新型混联采摘机械臂的机构综合,以及机械臂各部分结构设计和选型做了具体的分析与描述;并对机械臂的运动学、动力学进行了分析与仿真;最后对机械臂整体性能进行优化与分析,从而制作出物理样机。
1.4.2 研究方法
1.通过文献查阅,分析研究各种果蔬的生长环境和采摘环境,通过自由度,结构选型的原则,设计出一种新型混联采摘机械臂,利用 CAD 绘制出模拟工作区域,并采用取多点位置的方法勾勒出机械臂的工作空间,考虑机械臂尺寸关系和约束条件,利用 MATLAB 对结构尺寸参数进行优化求解;
2.对机械臂进行结构设计,完成对驱动和传动机构选型;
3.通过 D-H 法建立坐标系,建立机构运动学方程,并利用 ADAMS 仿真软件验证机械臂运动学分析的正确性;
4.建立腰部以上的各部分机构的动力学方程模型,得到机械臂各部分机构的力和力矩与各机构的位移、速度和角速度之间的关系式,再利用 ADAMS 进行动力学仿真,验证电机和减速器选型的正确性与合理性。利用 CAD 图解法规划机械臂采摘路径,并利用 ADAMS 进行仿真验证规划路径合理性与正确性;
5.基于运动学和动力学分析的结果,建立机械臂性能优化模型,利用MATLAB 遗传算法工具箱对其优化求解;再利用 ANSYS 软件对机械臂关键零部件进行强度校核,最后制作出物理样机。
第二章 新型混联采摘机械臂本体结构设计
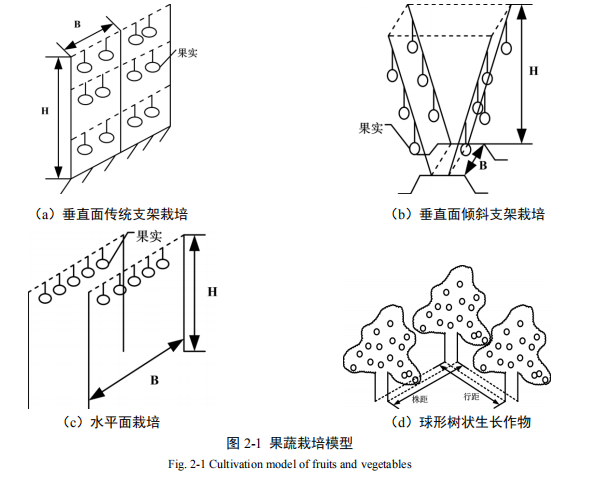
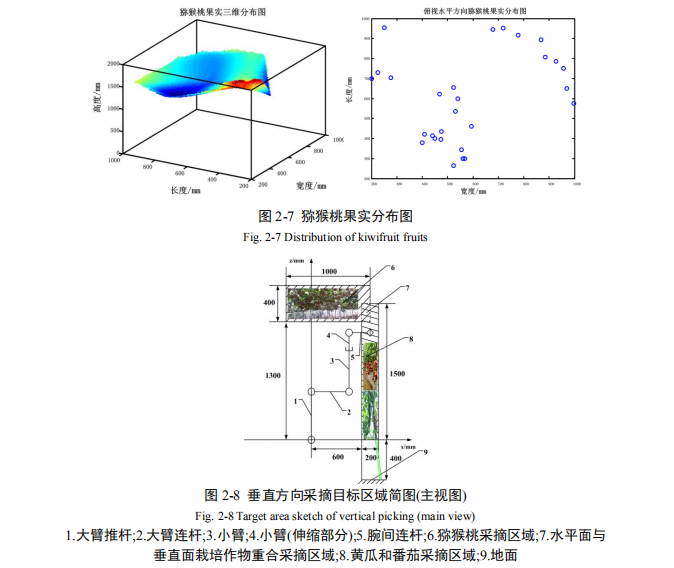
2.1 采摘作业环境特点
2.1.1 垂直面栽培作物
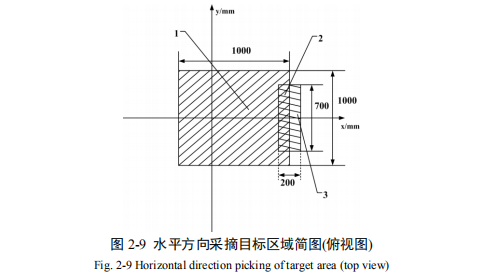
2.1.2 水平面栽培作物
2.1.3 球形树状生长作物
2.1.4 地表及其他栽培方式作物
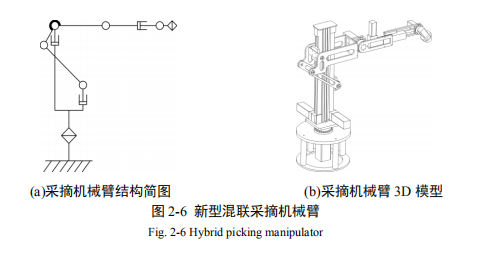
2.2 混联采摘机械臂的结构选型问题
2.3 混联采摘机械臂机构综合
2.3.1 机械臂的型综合
2.3.2 机械臂的尺寸综合
2.3.3 MATLAB 优化解
2.4 本章小结
第三章 新型混联采摘机械臂整体方案设计
3.1 混联采摘机械臂各部分结构分析
3.1.1 大臂结构设计
3.1.2 腰关节结构设计
3.1.3 小臂结构设计
3.2 混联采摘机械臂驱动及传动方式选择
3.2.1 驱动方式选择
3.2.2 传动方式选择
3.2.3 直线模组的选择
3.3 电机、减速器、直线模组设计选型
3.4 本章小结
第四章 新型混联采摘机械臂运动学分析
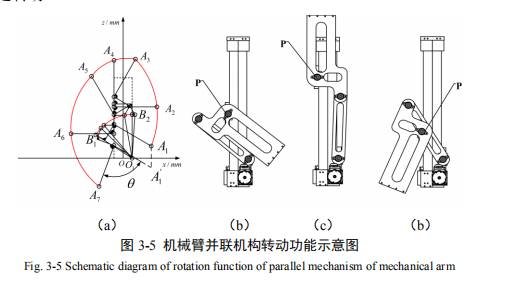
4.1 腰关节运动学分析
4.2 大臂运动学分析
4.2.1 大臂运动学逆解
4.2.2 大臂运动学正解
4.3 小臂运动学分析
4.3.1 小臂运动学正解
4.3.2 小臂运动学逆解
4.4 混联采摘机械臂的运动学分析
4.4.1 运动学正解
4.4.2 运动学逆解
4.5 混联采摘机械臂运动学分析算例
4.6 混联采摘机械臂雅克比矩阵求解
4.6.1 两自由度并联机构雅克比矩阵求解
4.6.2 混联采摘机械臂的雅克比矩阵求解
4.7 混联采摘机械臂运动学仿真分析
4.8 混联采摘机械臂的轨迹规划
4.8.1 CAD 反解模型
4.8.2 机械臂轨迹规划
4.8.3 轨迹规划仿真
4.9 本章小结
第五章 新型混联采摘机械臂动力学分析
5.1 混联采摘机械臂动力学方程求解
5.1.1 拉格朗日动力学建模
5.1.2 机械臂各连杆动能和势能的计算
5.1.3 机械臂动力学方程建立
5.2 混联采摘机械臂的动力学仿真
5.2.1 动力学仿真预处理
5.2.2 动力学仿真结果分析
5.3 本章小结
第六章 新型混联采摘机械臂性能优化与研制
6.1 遗传算法简介
6.2 混联采摘机械臂性能优化设计
6.3 混联采摘机械臂优化解
6.4 混联采摘机械臂关键结构强度分析
6.5 混联采摘机械臂样机的制作
6.5.1 样机整体设计理念
6.5.2 新型混联采摘机械臂的重构性
6.6 本章小结
总结与展望
1.课题研究工作总结:
本文针对当今采摘机器人普遍存在的通用性差、结构不灵活及成本高等问题进行设计研究,设计出了一种新型混联采摘机械臂,主要研究内容及得到的结论如下:
(1)分析不同果蔬的生长特性和采摘环境,构建了采摘目标分布立方体模型,并利用 CAD 模拟仿真技术构造出机械臂工作空间范围;建立尺寸优化模型,利用 MATLAB 对结构尺寸参数进行优化求解,使得采摘机械臂能够满足通用性强、结构紧凑、性能最优的设计要求;(2)考虑设计要求,完成了采摘机械臂的结构设计、驱动方式和传动机构选型,并验证了选型的合理性;(3)构建了机械臂的运动学方程和动力学模型,利用 ADAMS 软件仿真验证了机械臂运动学及动力学分析的正确性;利用几何法在 CAD 中构造出机械臂的反解模型,对其进行轨迹规划,并采用 ADAMS 软件仿真验证了其正确性;(4)基于采摘机械臂结构设计、运动学和动力学分析,利用遗传算法对采摘机械臂性能模型进行了优化求解;采用有限元法对机械臂的关键零部件进行了强度校核,最终完成了混联采摘机械臂样机的制作。
2.论文创新点
研制出一种新型混联采摘机械臂。
3.研究工作的展望本文对新型混联采摘机械臂的分析与研究为后续深入研究奠定了坚实的基础,由于研究时间不足,诸多不足还需进一步深入研究、改进:
(1)进一步优化机械臂结构尺寸,降低重量,提高控制精度; (2)后续导航和视觉系统要进一步深入研究、完善。
参考文献
[1] 谭敦勇, 谢飞军, 张先清, 等。 水稻生产全程机械化技术经济效益分析[J]. 农业工程,2017, 7(1): 112-115, 118.
[2] 苏帅。 猕猴桃采摘机器人信息感知的基础研究[D]. 陕西: 西北农林科技大学, 2013.
[3] 鲍官军, 荀一, 戚利勇, 等。 机器视觉在黄瓜采摘机器人中的应用研究[J]. 浙江工业大学学报, 2010, 38(1): 114-118.
[4] 潘强, 王波, 冯淳元, 等。 农业机器人发展概况与展望[J]. 青海农机推广, 2017(1): 29-30.
[5] 张智。 蒸汽发生器检修用机械手控制系统设计[D]. 哈尔滨: 哈尔滨工程大学, 2006.
[6] R. Featherstone. Rigid Body Dynamic Algorithms: Springer-Verlag[M]. America: Proc NattAcad Sci USA, 2001.
[7] Baeten J, Donne K, Boedrij S, et al. Autonomous Fruit Picking Machine: A Robotic AppleHarvester[J]. Springer Tracts in Advanced Robotics, 2007, 42: 531-539.
[8] Hayashi S, Shigematsu K, Yamamoto S, et al. Evaluation of a strawberry-harvesting robot in afield test[J]. Biosystems Engineering, 2010, 105: 160-171.
[9] Hayashi S, Yamamoto S, Tsubota S, et al. Automation technologies for strawberry harvestingand packing operations in Japan[J]. Journal of Berry Research, 2014(4): 19-27.
[10] https://www.energid.com/industries/agricultural-robotics.
[11] Mehta S S, Burks T F. Vision-based control of robotic manipulator for citrus harvesting[J].Computers and Electronics in Agriculture, 2014(102): 146-158.
[12] 王燕。 黄瓜采摘机器人运动规划与控制系统研究[D]. 浙江: 浙江工业大学, 2010.
[13] 陆怀民。 林木球果采集机器人设计与试验[J]. 农业机械学报, 2001, 32(6): 52-58.
[14] 陆怀民, 刘晋浩, 于遵波, 等。 林木球果采集机器人[J]. 机器人技术与应用, 1997(5):4-5.
[15] 顾宝兴。 智能移动式水果采摘机器人系统的研究[D]. 南京: 南京农业大学, 2012.
[16] 王韧。 农业采摘机器人机械臂结构设计与分析[D]. 湖南: 湖南农业大学, 2010.
[17] 梁喜凤。 番茄收获机械手机构分析与优化设计研究[D]. 杭州: 浙江大学, 2004.
[18] 吕小莲。 基于四自由度西红柿采摘机器人视觉系统的研究[D]. 沈阳: 沈阳农业大学,2008.
[19] 张凯良, 杨丽, 王粮局, 等。 高架草莓采摘机器人设计与试验[J]. 农业机械学报, 2012(9):166-172.
[20] 李桢。 猕猴桃采摘机器人机械臂运动学仿真与设计[D]. 陕西: 西北农林科技大学, 2015.
[21] 郝玉梅, 李凯荣。 洛川县红富士苹果树冠层特性初步研究[J]. 干旱地区农业研究, 2007,25(5): 75-79[22] 熊有伦主编。 机器人技术基础[M]. 武汉: 华中理工大学出版社, 1996.
[23] 牧野洋, 谢存禧, 郑时雄主编。 空间机构及机器人机构学[M]. 北京: 机械工业出版社,1987.
[24] 吴伟国, 邓喜君, 蔡鹤桌, 等。 高灵活度仿人臂型七自由度冗余机器人的研究[J]. 高技术通讯, 1996, (8): 30-33.
[25] 潘春洪, 马颂德。 基于多约束融合的人手臂三维运动分析[J]. 中国图像图形学报, 2001,6(11): 1053-1057.
[26] 杨文亮。 苹果采摘机器人机械手结构设计与分析[D]. 江苏: 江苏大学, 2009.
[27] 杜增辉, 孙克军主编。 步进电机和伺服电机的应用与维修[M]. 北京: 化学工业出版社,2016.
[28] 王梦涛。 六自由度机械臂模块化设计与运动控制的研究[D]. 安徽: 安徽工业大学, 2017.
[29] 谢海波, 王程, 杨华勇。 液压驱动连续型机械臂原理与设计[J]. 液压与气动, 2017(9):13-16.
[30] 王占军, 赵玉刚, 刘新玉。 直角坐标型机器人机械结构与控制系统设计[J]. 制造业自动化, 2014(2): 18-19.
[31] 白丽平。 机器人的动力学与电机选择计算[D]. 沈阳: 中国科学院沈阳自动化研究所,2000.
[32] 胡飞, 尹文庆, 陈彩蓉。 基于MATLAB的移栽机械臂运动学分析与仿真[J]. 江西农业学报, 2012, 24(12): 151-153.
[33] Denavit J, Hartenberg R S. A Kinematic Notation for Lower-Pair Mechanisms Based onMatrices. Journal of Applied Mechanics, 1995, 21(5): 215-221.
[34] 黄志雄, 何清华, 邹湘伏, 等。 一种求取运动学逆解的新算法[J]. 中国工程机械学报,2004, 2(1): 7-10.
[35] 王新辉。 基于 Pro/E 的相贯曲面堆焊运动仿真分析[D]. 北京: 机械科学研究总院, 2011.
[36] 孙树栋主编。 工业机器人技术基础[M]. 西安: 西北工业大学出版社, 2006.
[37] Holland J H. Adaptation in nature and artificial systems[J]. Ann Arbor: The University ofMichigan Press, 1975, 18(3): 529-530.
[38] Rosenberg R B. Simulation of genetic populations with biochemical properties: II. Selectionof crossover probabilities[D]. Ann Arbor: University of Michigan, 1967.
[39] 倪迎真。 3UPS-RPR 并联机构静刚度优化设计[D]. 天津: 天津工业大学, 2017.
[40] 耿磊。 六自由度工业机器人的建模与仿真研究[D]. 沈阳: 东北大学,
致谢
随着毕业论文截稿完成,毕业悄然而至,回首两年的研究生求学生涯,受益良多。
首先要感谢我的导师张亮,导师无论在学术指导,还是日常生活中,都对我耐心教导,关怀备至,平易近人、和蔼可亲的教学风格,一丝不苟、严禁的学术作风都深深的感染着我、影响着我,我会铭记老师的谆谆教诲,在以后的学习、工作和生活上严格要求自己,不断进取。同时还要感谢魏连宁老师和所 有悉心指导过我的老师,帮助过我的室友和同学,我所取得的一切成果都离不开所有人的帮助和理解。
然后也要感谢我的父母和家人,给与我良好的学习和生活条件,他们无私的辛劳付出,我都铭刻于心。
其次也要感谢陪我大学生涯一路走来的女朋友,她的理解、包容、鼓励与支持,让我更加努力前行。
最后还要感谢在百忙之中抽出宝贵时间评阅本论文的专家、教授们,再次表示深深的敬意和衷心的感谢!
(如您需要查看本篇毕业设计全文,请您联系客服索取)