24Сʱ���Ķ�������
24Сʱ���Ķ�������
ժҪ
�������Ŵ��綯�����ķ��ٷ�չ����������ϵͳ���ӳ̶�ҲԽ��Խ�ߣ�����Ĺ���ʧЧ��ȫ����Ҳ�����ԡ�Ȼ�����ڴ�ͳ�Ŀ�����ʽ�Ѿ����ܹ������뱣֤��ص�Ԫ��ȫ�Ե�������������� ECU �Ŀ��������빦�ܰ�ȫ�ĸ��ͨ�����ܰ�ȫ�� ISO26262 ȫ�汣֤��ص�Ԫ����Ӧ�ù����еİ�ȫ���⡣�ñ��� ECU�ڿ�������У�������빦�ܰ�ȫ��صļ����淶��Ҫ������������Ƽ�����Ϊ�綯���ؼ�����ҲӦ���ǹ��ܰ�ȫ��
�������Ļ��ڶԹ��ܰ�ȫ���о��Ļ����ϣ������������������Ĺ��ܰ�ȫ�ԡ�
�������������������Ӳ�����ܰ�ȫ�Բ����ƺ�ȱ����⼰������Ƶ����⣬�������Ӧ��Ӳ���ܹ��������ܹ������ڴ˻������������Ӧ�İ�ȫ���ƣ�ͬʱʵ�����������Ȱ�ȫ����������ͨ�� HIL Ӳ���ڻ�����ƽ̨��ģ���������������� ���������������ʵ�ֺ�����������������˹��ܲ��Ժ���ע����ԣ���֤�˱�����Ƶ����������������ĵ���Ҫ�������£�
����1. ���ȶԹ��ܰ�ȫ�������о����ֱ�����˹��ܰ�ȫ�����ݡ�������ȫ�������ں�������ȫ������ ASIL �ȼ���ͬʱ���ݹ��ܰ�ȫ�����������������ܰ�ȫ�Խ�����Σ��������DFMEA ���ʧЧģʽ��������������� FTA �������� �����õ���Ӧ�İ�ȫ����ͼ�����������������������ص㣬�������Ӧ��Ӳ���ܹ��������ܹ���
����2. ��ν���źŴ��������ص㣬�������������źŴ������ܽ��з������õ����ܴ��ڵ�DZ�ڹ��ϡ��������DZ�ڹ������⣬�������Ӧ�Ĺ��ϼ���봦�����ƣ������书��ģ���������ơ�������ʵ�֡�
����3. Ȼ���� CAN ����ͨ���ص㣬�ٽ�һ����Ӳ������Ƕȳ��������� CAN����ͨ�Ź��ܽ��з������õ����ܴ��ڵ�DZ�ڹ��ϡ����ñ��� CAN ��������ƣ����й��ϼ��ʹ����������书��ģ���������ơ�������ʵ�֡�
����4. ���ͨ�� HIL Ӳ���ڻ�����ƽ̨��˲���̨�ܣ�ģ���˵綯�������ܳ��ϵ�����ͨ���Լ��ź��������������ʹ�� CAPL �ű����Ա�д����������ʵ��HIL ����ƽ̨���ϵ��Զ���ע����ָ��������������������˹��ܲ��Ժ���ע����ԡ�
�������Խ��������������������������������ע�������£�Ӳ�����ܶ�������������ͬʱ��Ӧ�İ�ȫ����Ҳ�ܹ������ϵķ���������������ദ�������й��ϼ���ʿɴ� 99%���ϣ�ϵͳ�л�����ȫ״̬���ʱ��Ϊ 45.9ms,������Ӧ�İ�ȫ����Ͱ�ȫĿ�ꡣ��ˣ���֤�˻��ڹ��ܰ�ȫ����Ƶ��������������Ϲ��ܵȼ� ASIL D �������Ҫ������������������İ�ȫ�ԺͿɿ��ԣ������˹��ܱ���ʵ�ü�ֵ��
�����ؼ��ʣ����������������ܰ�ȫ����ASIL �ȼ���Ӳ���ڻ�������ע�����

Abstract
����With the rapid development of pure electric vehicles, the vehicle control system is becoming more and more complex, and the accompanying functional failure safety issues are also increasingly prominent. However, based on the traditional development method, it is unable to meet the requirements of ensuring the safety of the electronic control unit. Therefore, the concept of functional safety is introduced in the development of automotive ECU, and the safety problem in the development and application of the electronic control unit is fully guaranteed through the functional safety standard ISO26262. This standard proposes technical specifications and requirements related to functional safety in the development and design of ECU. Therefore, vehicle control technology should also consider functional safety as a key technology for electric vehicles.
����Based on the research of functional safety standards, this thesis analyzes the functional safety of vehicle controllers. Aiming at the problem that the vehicle controller is not perfect in hardware function safety and lack of monitoring and redundancy mechanism, the corresponding hardware architecture and software architecture are designed. Based on this, the corresponding security mechanism is designed, and the security mechanism software such as monitoring and redundancy is realized. Finally, through the HIL hardware-in-the-loop test platform, the signal input and output of the vehicle controller are simulated. The function test and fault injection test of the completed vehicle controller were carried out to verify the vehicle controller designed in this thesis. The main contents of this article are as follows:
����1. First, the functional safety standards were studied, and the standard content, vehicle safety life cycle and automotive safety integrity ASIL level were introduced. At the same time, according to the functional safety standards, the safety analysis of the vehicle controller is carried out by hazard analysis, DFMEA analysis and FTA analysis, and the corresponding safety requirements and technical requirements are obtained.Combined with the characteristics of the vehicle controller, the corresponding hardware architecture and software architecture are designed.
����2. Secondly, combined with the characteristics of signal processing functions, the signal processing functions of the vehicle controller are analyzed to obtain potential faults. Aiming at the above potential faults, the corresponding fault detection and processing mechanism is designed, and its functional modules are designed, simulated and implemented.
����3. Then combined with the characteristics of CAN network communication, further analyze the CAN communication function of the vehicle control from the hardware level, and obtain potential faults. The redundancy mechanism of the backup CAN is used to detect and process faults, and the functional modules are designed, simulated and implemented.
����4. Finally, a test bench was built on the hardware in the loop test platform to simulate network communication and signal input and output. And use the CAPL script language to write test cases, realize the automatic injection and recovery of HIL test platform failures, and perform functional test and fault injection test on the vehicle controller.
����The test results show that the hardware function can work normally under normal conditions and fault injection conditions. At the same time, the corresponding security mechanism can also detect the occurrence of the failure and redundantly process it. The fault detection rate is over 99%, and the maximum time for the system to switch to the safe state is 45.9ms, which meets the corresponding security requirements and security objectives. Therefore, it is verified that the vehicle controller designed based on the functional safety standard meets the relevant requirements of the functional grade ASIL D level, which improves the safety and reliability of the vehicle controller and embodies the practical value of the functional standard.
����Keywords: VCU, Functional Safety Standard, ASIL Level, HIL, Fault Injection Test
Ŀ¼
������ 1 �� ����
����1.1 �����������
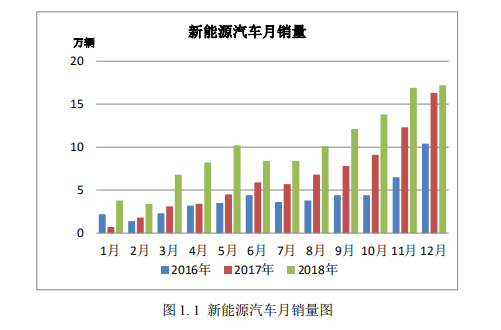
�������Ŵ��綯������Ѹ�ٷ�չ�����綯����������Ⱦ������������Ч�ʺͽṹ���ص��ܵ������У�ͳ��������[1].�� 863 �ƻ���ʼ�����չ����Դ��������"ʮ����"��"ʮ����"�滮������ƶ�����Դ������չ���ٵ�"��������"������ϵ���γɣ�ȫ�������˵綯��������Ʒ�ʺ����ܡ�ͬʱ���Ų�����������Ӧ�Ĺ滮���� 2020 ������Դ��������ռ�������������� 7%,�� 2025 ��ռ�������������� 15%,�� 2030 ��ռ�������������� 40%[2].��ֹ 2018 ����ҹ�����Դ����������������������ͳ����ͼ 1.1 ��ʾ[3].
�����ڹ��Ҵ���֧���ƶ��£����綯����ӭ����Ѹ�ٷ�չ�����ڷ�չ�Ĺؼ�ʱ�ڣ�������İ�ȫ����Ҳ�����ԡ�2011 �� 4 �£�����һ�����綯����ڽ�ͷ��ȼ����Ϊ������Դ�����ƹ�����������ȫ�¹�[4].��ͳ���� 2018 ��ȫ���У����ٻ�����Դ���� 13.57 �������ٻصı����ߴ� 13.46%,Լȫ�������ٻ������� 1%.�� ���ٻص���Ҫԭ�������ڳ����ڵ�ء��ƶ�������ձ��Լ���������������������صĹ��ܹ������⡣�������ӵ���ϵͳ���渴�ӻ����밲ȫ��صĵ�� ECU ��ԪԽ��Խ�࣬�����밲ȫ��صĵ��ϵͳ���ֹ���ʧЧ�����°�ȫ���⣬��Ϊ���ܰ�ȫ����ע�ķ��롣���Ű�ȫ���������ͻ������ͳ�Ŀ�����ʽ�Ѿ����ܹ������ص�Ԫ�İ�ȫ���������������ص�Ԫ���������빦�ܰ�ȫ�ĸ��ͨ�����ܰ�ȫ��ȫ��ر�֤��ص�Ԫ����Ӧ�ù����еİ�ȫ����[5].���Ϊ�˱�֤�������ӵ�����ȫ�ɿ������У�����ѹ��ܰ�ȫ��Ϊ�ؼ���������֮һ��
�������ܰ�ȫ��ָ���������ڵ��ӵ���ϵͳ�Ĺ����쳣�����µ�Σ���¼�����Ҫ��ϵͳ��ʧЧ�������Ӳ��ʧЧ����Ĺ����쳣[6].����ϵͳ��ʧЧ��������ƿ����β���һ���ķ�������ܣ��������ʧЧֻ�ܽ��͵��ɽ��ܵij̶ȷ�Χ�ڡ�
����ͨ�����������ӵ���ϵͳ���ܰ�ȫ�Եķ�������ƣ��ڳ������й�����ʵʱ����빦�ܰ�ȫ��صIJ�������ǰ���Σ���¼��ķ�������֤ϵͳ�İ�ȫ�ԺͿɿ��ԡ�
�������� 2011 ����ʱ�����֯�����˵�·�������ܰ�ȫ�� ISO26262,�ñ�����ӹ��ܰ�ȫ�Ƕ������Dz�Ʒ�Ŀ������Գ�����ϵͳ����˹����Եİ�ȫҪ����Թ�����Ϻ��ϴ����Ŀɿ��ԣ����빦�ܰ�ȫ��صĹ��Ϸ��ս��͵�һ�����Խ��ܵ�ˮƽ��ʹϵͳ��������Ĺ��ܰ�ȫ�ȼ�[7-9].���ų������ܻ��ͷḻ������ߣ����ӵ�����Ʒ����Ӧ�����������������У�Ŀǰ����Ӧ�������ܸ�����ʻ�Ͷ������������У�����Ҳ�㷺Ӧ������������ȫ�ͳ�����̬����ϵͳ�����У�ֻҪ�е��ӵ���ϵͳ�ͻ��й��ܰ�ȫ����Ӱ[10-11].
����������Դ����ӭ�����ٷ�չ�Ĺؼ�ʱ�ڣ���Ϊ����ؼ������е��������Ƽ�����ʵ��ҲӦ���ǹ��ܰ�ȫ��������������Ϊ�������Ƽ���ʵ�ֵ����壬ͬʱҲΪ�˱�֤�����������ɿ����У���������ϵͳʧЧ�����Ӳ��ʧЧ�����İ�ȫ����[12-13].��ˣ��ڴ��綯���������������Ŀ�������У�����ѹ��ܰ�ȫ��Ϊ�ؼ�����Ҫ��֮һ��Ϊ�˱�֤�����������Ĺ��ܰ�ȫ�ԣ�����Ҫ�з��Ϲ��ܰ�ȫ��Ӳ���ܹ�������Ӳ����·��Ԫ��������ʧЧ������ͬʱ��Ҫ�з��Ϲ��ܰ�ȫ�������ܹ����������������ü�������Ȱ�ȫ���ơ�Ŀǰ�ڹ������ѹ㷺���ù��ܱ����������ӵ�����Ʒ���п����ˣ����ڹ��ڶ� ISO26262 ���ܱ�Ӧ���ڴ��綯���������������ϵĿ����������[9].��˱��Ļ��ڹ��ܰ�ȫ����������ڸ� ��κ�ϵͳ��ƽε���ؼ����淶��Ҫ���������������й��ܰ�ȫ�Է�������Ʒ���һ������Ҫ�������������Ӳ������������������İ�ȫ�ԺͿɿ��ԣ����������ʵ�֣�����һ�����о����塣
����1.2 �綯������������������
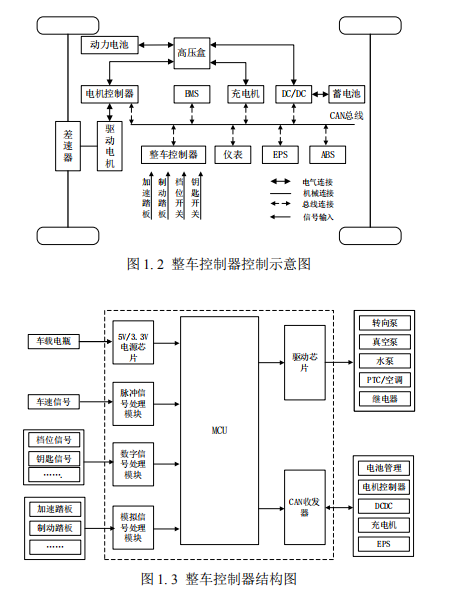
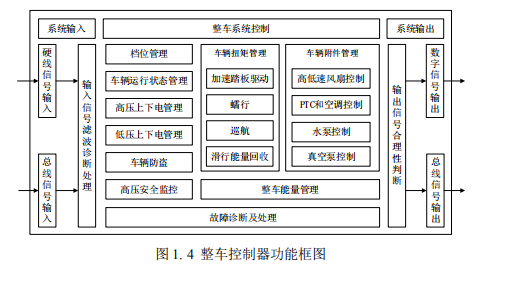
�����綯����������������VCU����Ϊ���������еĺ���ϵͳ��������Ҫ���������������Ҫ����VCU ��Ҫͨ���ɼ�����̤�塢�ƶ�̤��͵�λλ�õ��ź����жϼ�ʻԱ�IJ�����ͼ��ͬʱ�����ܳ�ϵͳ�ϵĵ�ع���ϵͳ��BMS���͵������ϵͳ��MCU�����������״̬��Ϣ��������������Ť�ز�ͨ�� CAN ���緢��ָ���MCU ���Ƶ�������������ʵ���������������ƶ����������յȹ������Ӷ��ﵽ�������Ŀ���[14].�����������ڴ��綯�����еĿ���ʾ��ͼ��ͼ 1.2 ��ʾ����������������Ӳ����ɽṹ��Ҫ�ɵ�Դģ�顢MCU ��Сϵͳģ�顢�źŴ���ģ�顢�������ģ��� CAN ͨ��ģ����ɣ�һ��ṹ��ͼ 1.3 ��ʾ��
����ͬʱ VCU �������������������������������������������λ��������������״̬��������ѹ���µ��������ѹ��ȫ��غ�����ϵȹ�����������������������Ҫ���������������з��������ʹ��������˾����ԡ������Ժ������Եȡ��������������Ҫ�䵱���ؽ�ɫ��������������б�������ͱ���·�ɣ�ͬʱ������������ ECU �ڵ�˯�ߺͻ��ѹ���[15].��������������Ҫ�������еĸߵ��ٷ��ȡ�PTC���յ�����ձý��й�������������״̬������Ҫ���������������ƶ����������յ�״̬���й�������ѹ���µ������Ҫ������Ƹ�ѹ���м̵���ʵ�ֵ�ذ��������������������ֱ��ת������DCDC��������[16].��ѹ��ȫ�����Ҫ�Ը�ѹ������ѹ��·���м�أ���ֹ��ѹ��·�쳣��·���·�ȹ��Ϸ���[17].
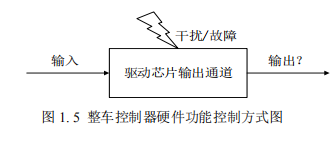
��������������ǶԳ�������״̬���ж�̬��⣬����ǰӦ���������ϵķ������� VCU���ܽṹͼ��ͼ 1.4 ��ʾ��
����1.3 ���ܰ�ȫ�������о���״
����1.3.1 �����о���״
�����������ѹ㷺ʹ�û��ڹ��ܱ�����Ĺ��ܰ�ȫ V ģʽ���� ECU ��Ʒ�Ŀ�������֤�� ECU �İ�ȫ�Ժ��ȶ��ԡ��� ECU ����������Ϊ�������̺�ʹ ECU �������п��ظ����ԣ���������������ϵͳ�ܹ����ˣ�AUTOSAR���������˿������� ��ʹ�� ECU ����������������ͬʱ����� ECU ���ܰ�ȫ�����������о���
�������������ӹ��ܰ�ȫ���о��У������� 2005 �ƶ��� ISO26262 ��·�������ܰ�ȫ�������� 2011 ����ʽ�䲼��ʹ�á��ڸñ��ж����˹���������ȫ�������ں�������ȫ�����Եȼ���ASIL�������ؼ����ʹ���������ӵ�����Ʒ�ڰ�ȫ���������ڴӸ�����ƽΡ���Ʒ�����ε����������α����ϸ�����ذ�ȫ�淶���У������IJ�Ʒϵͳ���ܰ�ȫ�Եõ��ܴ������[12].ͬʱŷ�������Ѿ�ǿ��Ҫ���������ӵ�����Ʒ���밴�չ��ܰ�ȫ�����п�������Ʒ����ͨ����ȫ��֤����ͨ��������˾Ϊ���빦�ܰ�ȫ���������˹�˾�з����żܹ������㹦�ܰ�ȫ���еĿ������̣��������綯���� i3 �� BMS Ҳ�ﵽ�� ISO26262 ��������ȫ�����Եȼ� ASIL D ������˹���� BMS ����Ҳ���� ISO26262 ��Ҫ��[6].
�������������ӹ��ܰ�ȫ�о��У�����������оƬ���� Freescale��ST �� Infenion�ȶ��������Ŀɿ��Խ������о�����ƣ�����˷��� ISO26262 ��·�������ܰ�ȫ����������оƬ����ҪӦ���ڳ������ơ����̿��ƺͶ������Ƶȷ��档��Freescale ��˾��Ʒ��� ISO26262 ���� MPC ϵ�� 32 λ������������Щ��������Ʒ�в��������µĶ��ں˼����������Լ�����У�� ECC ģ�飬ʹ�������ݴ��桢���ܺͿ��ƹ��ܷ���ﵽ�˸���ȫ�����[18].ѡ�ø�ϵ����������ʹ����� ISO26262 ��������ϵͳ���ѶȽ��͡���������ҲרΪ��������ϵͳ�Ĺ��ܰ�ȫ���з�����Ӧ��Ӳ������̽�⼰Ԥ��������ͬʱ���ɹ�������һ��֧��ISO26262 ���ܰ�ȫ������������Ƭ��ϵͳ��SoC��ԭ�ͻ�[19].Ӣ����ҲΪ��ȷ����Ʒ��Ʒ��Ϲ��ܰ�ȫ�����Ƴ�һ����Ӧ�����������ʹ�û��� 32 λ TriCore?
������������Ƕ��ʽ��Ʒ��� IEC61508 �Ĺ�����ȫҪ��[20].
�����ڹ����о���Ա�Թ��ܰ�ȫ�о��У��������� Prakhar Srivastava �� ManishLaxman Karle Ӧ�� ISO26262 �������� ECU ����Ӳ����ƹ��̣�ʹ�� FMEA ʧЧģʽӰ�켰��������� FTA ���������������˿ɿ��Է�����ȷ����Ƶ� ECU ��ʧЧ���ܺͷ�ʧЧ���ܣ����ٰ�ȫʧЧ״̬[21].���������������ѧ�� M.SonzaReorda �� M. Violante �Գ��� ECU Ӳ���ڻ����Խ����˹���ע�룬�о��˳�������ѧ����ʧЧ�������Ӧ����֤������ϵͳ�Ĺ��ܰ�ȫ[22].�¹������� Sri RamaChandra Murthy Batchu �ڵ綯�����������ģ���У�����α�֤ ISO26262 ���İ�ȫԭ�Ӽ��ӡ����ࡢ�칹����ϵȰ�ȫ��ʩ������Ӳ��ʧЧ�����˷���[23].
����1.3.2 �����о���״
�������ڶԹ��ܱ��о��϶࣬���ڴ��綯�����������Ʒ����Ӧ�ý��٣�����Ȼ���ô�ͳ V ģʽ���������ӵ�����Ʒ���п�����δ�ӹ��ܰ�ȫ�Ƕ����Բ�Ʒ������ƺͿ��������ڶ� ECU ���ܰ�ȫҲ�����������о���
�������������ӹ��ܰ�ȫ���о��У�2007 ���ƶ��� GB/T20438 ����/����/�ɱ�̵��Ӱ�ȫ���ϵͳ�Ĺ��ܰ�ȫ�����ñ������˵��ӵ�����ȫ���ϵͳҪ������Ҫ���ȷ����ȫ�����Եȼ��ķ�����ʾ������ ISO26262 �䲼�Ժ�ȫ��������������ίԱ���� 2012 ���´����ƶ����ұ�����·�������ܰ�ȫ���ļƻ������� 2017 �� 10 �·��������� 2018 �� 5 ����ʽʵʩ[24].�ñ��Գ������ܰ�ȫASIL �ȼ����ؼ����������ܰ�ȫ���̿�����ϵ�Ͳ���������ϵ�������о���Ϊ�ƶ��ñ�����ҵ�е��ƹ���ʵʩ������ҹ����������ؼ����ϵͳ�Ĺ��ܰ�ȫ������"��·�������ܰ�ȫ���о��ƶ�������"�ƶ���"ʮ����"�ڼ�Ĺ���Ŀ��滮���ù滮���ǹ��ܰ�ȫ����������ܰ�ȫ���Թؼ����������ܰ�ȫ�������ۺ��ܰ�ȫ���������ȷ���[25].
�������������ӹ��ܰ�ȫ�о��У����ƶ��������� 2015 �����ϵ���־��ʽǩ����ISO26262 ���ܰ�ȫ����������֤�ĺ���Э�飬��Ϊ�й������뵼����ҵ�����������ܰ�ȫ����������֤��Ŀ����ҵ[26].��������Ƽ�����˾���������Ӳ�Ʒ���ܰ�ȫ������Ҳ���ŷḻ�ľ��飬�� 2012 �꿪ʼ�о� ISO26262 ���Ѿ������˹��ܰ�ȫ��ر��ͼ�������Ϥ���ܰ�ȫ�������̣���Ϊ�������������ṩ���ܰ�ȫ��ؼ���֧�ֺͷ���[27].
�����ڹ����о���Ա�Թ��ܰ�ȫ�о��У�ͬ�ô�ѧ���Խ�����ȫ���ҽ����˹��ܰ�ȫ�ķ�����ȷ�����䰲ȫ�����Եȼ����ܰ�ȫĿ�꣬������˹��ܰ�ȫ�� ��������ȫ��ص�·�����˹��ܰ�ȫ�ķ���[28].��������ҵ��ѧ�����Դ��綯��������������Ӳ��������ʧЧ�Է������о���������˫ MCU ��������ƣ����������������Ӳ���Ŀɿ���[29].���ִ�ѧ�Ķŵ����ڶԵ綯���������������������ϵͳ���о��뿪���У����������� MCU Эͬ���ƵĿ��Ʋ���[30].�������������о�Ժ���Ŀ����͵��϶������Ŀ���Ϊ���������� ISO26262 ���ܰ�ȫ����ε���ƺͿ�������������Ŀ���塢Σ�շ����ͷ��������Լ����ܰ�ȫ�ȸ���[31].�廪��ѧ��ѧ����ڶԹ��ܰ�ȫ�� ISO26262 �����˽��ܣ�ͬʱ�Ե綯����ת��ϵͳ������ FMEA ����������"ת�����"Ϊ���¼������˹�����������ΪӲ���Ĺ��ܰ�ȫ����ṩ�˽��[32].
����1.4 �����������������ܰ�ȫ�Դ��ڵ�����
��������ǰ�ĵĽ��ܣ�Ŀǰ���д��綯������������������һЩ�ؼ��Ĺ��ܰ�ȫ�����⣬��Ҫ��Ϊ�����������棺
����1.4.1 Ӳ�����ܰ�ȫ�Բ�����
����������[5]�����������ܰ�ȫ��Ӳ������밲ȫ�����У��ᵽ������걸�����Ӳ���Ĺ��ܰ�ȫ������Ϊ��Ҫ����Ŀǰ�� ECU Ӳ�����������У����ٴӹ��ܰ�ȫ�ĽǶȳ�����������[29]���ڴ��綯�����������������ʧЧ���������о��У���Ӳ��Ԫ����ʧЧ�����������о�����δ�ص������������Ӳ�����ڵ�DZ��ʧЧ���з�����ͬʱ�ڸ������в�����˫ MCU ��Ӳ���ܹ���ȴֻ���õ�����ԴоƬΪ�� MCU ���磬δ�ӵ�Դ�Ƕȳ������и��� MCU,�������������γɶ�����˫MCU ������ϵͳ������Ҳδ���ݹ��ܰ�ȫ������Ӳ���ܹ�ָ����������밲ȫȷ�ϡ�Ӳ���ܹ�ָ��δ�ﵽ��Ӧ���ܰ�ȫ�ȼ����涨��ָ�꣬��Ҫ����Ϊ������Ϻ�DZ�ڹ���ָ��͡��������ָ���������ijһ��Ԫ����ʧЧ���ϵͳʧЧ������ָ�꽵�ͣ���ͨ�������Ϲ�����߸�ָ�ꡣDZ�ڹ���ָ�꽵����������Ƶ���Ϲ��ܳ��ֹ���ʱ�����ͣ�����ͨ�����������Ϲ����γ�˫������ָ�ꡣ
����Ӳ���ܹ�ָ����Ҫ���ں���Ӳ���ܹ��ĺ����ԣ���˱��뱣֤����������Ӳ���ܹ�ָ��ﵽ��Ӧ��Ҫ��������[34]�����������������ܰ�ȫ������о��У��ᵽ���ڹ��ܰ�ȫ��������������ϵͳ�ܹ���ƣ�ȴδ��ϸ�о�Ӳ�����ܵĿ��Ʒ�ʽ����Ϸ�ʽ��������������Ӳ�����ܲ����Ͻ��з�����Ŀǰ����Ҫ�����˿������Ƶķ�ʽ�������ź������δ���������Ϲ��ܺ��ݴ����������γɱջ����ƣ����źŲɼ������������ CAN ����ͨ�ŵļ�غ���ϡ����źŲɼ������������ͨ��ģ���ܵ����ż�����ʱ������оƬ�����ж�������������״̬����˽����ںܴ�İ�ȫ�����������õĿ��Ʒ�ʽ��ͼ 1.5 ��ʾ��
����1.4.2 ��������ȱ��������������
����������[30]���ڵ綯�� VCU ���ϵͳ����������У����������� MCU Эͬ���ƵĿ��Ʋ��ԣ��ص��о��� VCU Ӧ�ò������ϵĿ��Ʋ��ԣ�ȴδ��������������м����㿼���������ֵ�Ӳ�����ϡ�������[33]���ڹ��ܰ�ȫ�������������������������У��ᵽ����Ӧ�Ĺ��ϼ���������������������˷��棬��Ҳδ��Ӳ������Ƕȳ��������������ϵļ���������ơ�������[6]���ڹ��ܰ�ȫ���Ϊ����Դ��չ�ṩ�����У��ᵽ���ù��ܰ�ȫ V ģʽ���� ECU �����ѳ�Ϊ�������ơ�������[24]�����й���·�������ܰ�ȫ���������滮�У��ᵽ���ܰ�ȫ�����ѳ�Ϊ�ƶ�������ҵ��չ�ĺ��Ĺؼ�������Ȼ��Ŀǰ��������������������ڲ��ô�ͳ�� V ģʽ�������̣�������ע����ʵ�ֹ���Ϊ��������Ӳ��������δ����Ӳ��Ԫ����ʧЧ�������������ܻᵼ�´�������DZ�ڵĹ��Ϸ��ա�
�������������������Ӳ�����ܲ����ϴ��ڵ����⣬������е�˫ MCU ����ԭ������иĽ����Ż������Ľ����������������ܽ��з������õ���������Ӳ�����湦�ܹ��ϵ��µ�ϵͳ��ʧЧ���⣬���Ը��ֹ��������Ӧ�ļ����ƺ�������ƣ���֤���Ϸ���������������ϵͳ�Դ��ڰ�ȫ״̬������ϵͳ��ʧЧ��ɲ���Ԥ���Σ���¼�����ˣ�������������Ӳ���Ŀ��Ʋ��ñջ����Ƶķ�ʽ�����������������������������Ӷ�����Ӳ�����ϵļ������Ϸ����ݹ��ܰ�ȫ����չ�����ƣ��������������������������Ҫ���һ�ֻ��ڹ��ܰ�ȫ��������������Ӳ����ʹ����Ϲ��ܰ�ȫ�������Ҫ���Ա�������������Ӧ�ò㹦�ܸ�Ч�ȶ����У���������������İ�ȫ�Ժ��ȶ��ԡ�
����1.5 ������Ҫ�о�����
����������Ҫ���ڹ��ܰ�ȫ������ؼ����淶��Ҫ������й��ܰ�ȫ�Է��������ȶ� VCU Ӧ�ò㹦�ܽ���Σ�������ͷ��������õ���Ӧ�Ĺ��ܰ�ȫĿ��Ͱ�ȫ�����������Ӳ��ʧЧ��ϵͳ��ʧЧ���µ�Ӧ�ò㹦��ʧЧ����θ��ݰ�ȫ�����һ����ȡ����Ӧ�ļ�����ȫ����Ȼ�����������������ص㣬���IJ���һ��˫ MCU �Ŀ���ԭ�����������������Ӳ���ܹ���ͬʱ����Ӳ���ܹ������Ӧ�İ�ȫ�������������������ʵ�ֺ���ע�������֤����������˱�����Ƶ��������������Ϲ��ܰ�ȫ���е����Ҫ�������ݰ��������½ڣ����½��������£�
������һ�� ���ۡ���Ҫ�����˶Դ��綯�����������������ܰ�ȫ�Ե��о��������书�ܸ�����Ȼ�������Ŀǰ���ܰ�ȫ��������о���״���ص���Ե綯��������������Ŀǰ���ڵĹ��ܰ�ȫ����������˷����������ܱ��ĵ�д���ܹ���
�����ڶ��� VCU ���ܰ�ȫ�Է�����ϵͳ��ơ����Ƚ��ܹ��ܰ�ȫ������ؼ����淶��Ҫ��Ȼ�������������������ص㣬��Ӧ�ò㹦�ܽ��й��ܰ�ȫ�Է�����
������������������������ϵͳ��ȫ�ܹ���ƣ�ͬʱ�������Ӧ����Ӳ���ܹ���
���������� VCU �źŴ������ܷ�������ơ����ȶ� VCU �źŴ������ܽ��з�����Ȼ��Ըù���ģ����ڵ������������Ӧ�İ�ȫ���ƣ���������Ӳ����������ơ�������ʵ�֣������ݹ��ܰ�ȫ���е�Ӳ���ܹ�ָ��Ҫ���Ӳ��ģ������˰�ȫȷ�ϡ�
���������� VCU ͨ�Ź��ܷ�������ơ����ȶ� VCU ͨ�Ź��ܽ��з�����Ȼ��Ըù���ģ����ڵ������������Ӧ�Ĺ��ܰ�ȫ���ƣ���������Ӳ���Ľ�������ơ������ʵ�֣������ݹ��ܰ�ȫ���е����Ҫ������˹��ܰ�ȫȷ�ϡ�
���������� VCU ���ܰ�ȫ������֤���������Ҫ�� VCU Ӳ�����м��ɲ��ԡ����ȶԲ���̨�ܽṹ���в�����Ȼ���ٶԲ�����������ͼ���н��ܡ������� VCU������ģʽ����ģʽ�½����˹��ܲ��Ժ���ע����ԣ����Բ��Եõ������ݽ��з�����
���������� �ܽ���չ�����ܽ��˱����ĵ���Ҫ�������о��д��ڵIJ��㣬����δ ����Ҫ��һ���ĸĽ���������չ����
������ 2 �� VCU ���ܰ�ȫ�Է�����ϵͳ���
����2.1 ���ܰ�ȫ���о�
����2.1.1 ISO26262 ������
����2.1.2 ��ȫ���������������Եȼ�
����2.1.3 Ӳ���ܹ�ָ��
����2.2 VCU ���ܰ�ȫ�Է���
����2.2.1 ���ܰ�ȫ�������
����2.2.2 DFMEA �� FTA ��������
����2.2.3 �����������
����2.3 VCU ϵͳ�ܹ����������
����2.3.1 VCU ϵͳ��ȫ�ܹ�
����2.3.2 VCU Ӳ����ȫ�ܹ�
����2.3.3 VCU ������ȫ�ܹ�
����2.4 ������
������ 3 �� VCU �źŴ������ܷ��������
����3.1 �źŴ������ܷ���
����3.2 �źŴ������ܰ�ȫ�������
����3.2.1 �źŴ�����ȫ����
����3.2.2 �źŴ������ܹ��ϼ��
����3.3 �źŴ�������ģ����Ӳ�����
����3.3.1 �źŴ���Ӳ��ģ��
����3.3.2 �źŴ�����ȫ��������
����3.3.3 ��ȫ�����������������
����3.4 �źŴ������ܰ�ȫȷ��
����3.4.1 Ӳ���ܹ�ָ�����
����3.4.2 Ӳ���ܹ�ָ�����
����3.5 ������
������ 4 �� VCU ͨ�Ź��ܷ��������
����4.1 ͨ�Ź��ܷ���
����4.2 ͨ�Ź��ܰ�ȫ�������
����4.2.1 ͨ�Ź��ܰ�ȫ����
����4.2.2 ͨ�Ź��ܹ��ϼ��
����4.3 ͨ�Ź���ģ����Ӳ�����
����4.3.1 ͨ�Ź���Ӳ��ģ��
����4.3.2 ͨ�Ź��ܰ�ȫ��������
����4.3.3 ��ȫ�����������������
����4.4 ͨ�Ź���Ӳ����ȫȷ��
����4.4.1 Ӳ���ܹ�ָ�����
����4.4.2 Ӳ���ܹ�ָ�����
����4.5 ������
������ 5 �� VCU ���ܰ�ȫ������֤�����
����5.1 ����̨�ܴ
����5.1.1 ����̨������ṹ
����5.1.2 ����̨�ܻ����
����5.2 ����ģʽ�¹��ܰ�ȫ������֤�����
����5.2.1 ͨ�Ź��ܲ���
����5.2.2 �źŲɼ����ܲ���
����5.2.3 ����������ܲ���
����5.2.4 ���Խ������
����5.3 ����ģʽ�¹��ܰ�ȫ������֤�����
����5.3.1 ͨ�Ź��ܰ�ȫ���Ʋ���
����5.3.2 �źŲɼ���ȫ���Ʋ���
����5.3.3 ���������ȫ���Ʋ���
����5.3.4 ���Խ������
����5.4 ������
������ 6 �� �ܽ���չ��
����6.1 �ܽ�
�������Ŵ��綯������Ѹ�ٷ�չ�������ŵİ�ȫ����Ҳ����ͻ�������մ�ͳ�� ECU������ʽ�Ѿ����ܹ������ص�Ԫ��ȫ��������������� ECU �Ŀ��������빦�ܰ�ȫ�ĸ��ͨ�����ܰ�ȫ�� ISO26262 ����֤ ECU ���������еİ�ȫ���⡣
������Ϊ����ؼ������е��������Ƽ���ʵ��ҲӦ���ǹ��ܰ�ȫ����˱������ȶ��������������ܰ�ȫ�Խ����˷��������������������Ӳ�����ܰ�ȫ�Բ������Լ���������ȱ�������������Ƶ������ϣ�������û��ڹ��ܰ�ȫ�� ISO26262 �����������������п�����Ȼ�������һ��˫ MCU ���Ƶ�Ӳ���ܹ��������ܹ������ͨ�� HIL Ӳ���ڻ�����ƽ̨��ʵ�ֵ�����������Ӳ�������˹��ܲ��Ժ���ע����ԣ����Խ��������Ƶ��������������Ϲ��ܰ�ȫ�ȼ� ASIL D �����Ҫ��������Ӳ�����ܰ�ȫ�Ժ��������ܰ�ȫ���ơ�������ɵ���Ҫ�������£�
����1. ���Ȼ��ڹ��ܰ�ȫ�� ISO26262 ���������������ܰ�ȫ�Խ�����Σ�������ͷ����������õ���Ӧ�Ĺ��ܰ�ȫ�ȼ����ܰ�ȫ�����Կ��ܴ��ڵĹ��ܹ��Ͻ����� FTA ������������ DFEMA ���ʧЧ�������������һ����ȡ����Ӧ�ļ�������ͬʱ�������Ӧ��ϵͳ��ȫ�ܹ���Ӳ���ܹ��������ܹ���
����2. ��ν���������ܰ�ȫ�Է������ٽ�һ����Ӳ������Ƕȳ����������������źŴ������ܽ��з������õ����ܴ��ڵ�DZ�ڹ��ϡ�������Ϲ������⣬����˫ MCU ���Ƶ�Ӳ���ܹ�����Ӳ����·����е�Ԫ����������ʧЧ������ͬʱ�������Ӧ�Ĺ��ϼ���봦��������ƣ������书��ģ���������ơ�������ʵ�֡�
����3. Ȼ���� CAN ����ͨ���ص㣬�ٽ�һ�������������� CAN ����ͨ�Ź��ܽ��з������õ����ܴ��ڵ�DZ�ڹ��ϡ����ñ��� CAN ��������ƣ����й��ϼ��ʹ����������书��ģ���������ơ�������ʵ�֡�
����4. ���ʹ�� HIL Ӳ���ڻ�����ƽ̨ģ��������������������źźͱ��ض���ʹ�� CAPL �ű����Ա�д����������ʵ�� HIL ����ƽ̨���ϵ��Զ���ע����ָ������������������й��ܲ��Ժ���ע����ԣ���Ҫ�����źŲɼ����ܡ�����������ܺ�ͨ�Ź��ܵIJ��ԡ����Խ�����������ϼ���ʿɴ� 99%���ϣ�ϵͳ�л�����ȫ״̬��ƽ��ʱ��Ϊ 36.9ms,��֤�˻��ڹ��ܰ�ȫ����Ƶ�����������������Ӧ�Ĺ��ܰ�ȫĿ�꣬��������������İ�ȫ�ԺͿɿ��ԡ�
����6.2 չ��
��������������������Ϊ���綯��������ؼ�����֮һ�����ۺϵ�ѧ��֪ʶ����ؼ�����Ϊ���ӣ���������Ҫ�����ڴ�Ӳ������Ƕȳ���ȥ�����������������ȫ�ԺͿɿ��ԣ�����δ��ȫ���ǵ�����������Ӧ�ò���Ʋ��Զ�������о�������һЩ������Ҫ��һ���о����Ż���
����1. ��Ҫ������������Ӳ�����ܽǶȳ�������������������ȫ�Խ�����ƣ��ں������о��п��Խ�һ������Ӧ�ò㹦�ܵİ�ȫ�ԣ���Ӧ�ò���Ʋ��Խ��з�������ƣ���������������Ĺ��ܰ�ȫ�ԺͿɿ��ԡ�
����2. �����ص�������ܹ��еײ��������м�����������������ʵ�֣������ɽ�һ�����м�����������ʵ�ֿ��ǵ����ܰ�ȫ�ԡ�
����3. ���Ľ�ͨ�� HIL Ӳ���ڻ�����ƽ̨�����������������˵������Ժ���ע����ԣ�δ��Ӳ���ֿ��ⲿӦ���Ľ�׳�Խ��в��ԣ������ɶ�����л������ԡ������Ժ� EMC ���Ե������Եõ����ӿɿ�ȷ�IJ��Խ����
���������
����[1] �����⡣ �����ҹ�����Դ�����ķ�չ��״����������̽��[J]. ����ʵ�ü�����2018, 277��22���� 16-18.
����[2] ������ ����Դ������չ��״����������[J]. ��ȼ��������� 2018, ��4���� 213-214.
����[3] ]�ş@�ա� ����Դ�綯�����о�[J]. ʱ�������� 2019, ��2����101-102.
����[4] ���ľ��� ���£� ���ı� �ٽ�����Դ������չӦ�õĶԲ��о�[J]. �Ƽ��㳡��2016, ��4���� 114-120.
����[5] �������� ����֮�� κ������ ������ҵ�еĹ��ܰ�ȫ�о�[J]. �й���ȫ������ѧ������ 2007, 3��1���� 51-55.
����[6] ��ҫh�� ���ܰ�ȫ���Ϊ����Դ�����ṩ����[J]. ��������֤�� 2017, ��5���� 38-40.
����[7] �������� ���ԣ� ����� �������ӵ���ϵͳ�Ĺ��ܰ�ȫ�� ISO26262[J]. �Ϻ������� 2011, ��10���� 57-61.
����[8] �ͺ��ң� ���鳬�� ��ӡ� ���� ISO26262 �ĵ�·�������ܰ�ȫ�������̽��[J].���������� 2016, ��7���� 57-59.
����[9] �����ꡣ ���ܰ�ȫ������ҵ�±�[J]. ��֤������ 2011, ��12���� 23-26.
����[10] Ԭ���㡣 �������ӵ���ϵͳ���ܰ�ȫ�� ISO26262 �ļ���̽��[J]. �Ƽ���Ѷ��2013, ��8���� 245-245.
����[11] ��꣬ ����� ף�ۡ� һ�ֻ��ڹ��ܰ�ȫ������ PEPS ϵͳ[J]. ũҵװ���복�����̣� 2014, 52��4���� 57-59.
����[12] ISO. ISO26262 Road Vehicle Functional Safety[S]. 2011: 10-80.
����[13] ��쳡� ISO26262 ��֤�������ܰ�ȫ����˼·[J]. ����������� 2015, ��37���� 30-33.
����[14] ����� ����Դ��������ϵͳ����ԭ����Ӧ��[M]. �Ϻ��� �Ϻ���ѧ���������磬2013: 35-48.
����[15] �ƾ�ꡣ ���綯�����������Ʋ��Լ�Ӧ����������[D]. ��� ����ѧ�� 2014.
����[16] �������� �������� ������ ���綯�����������Ʋ���[J]. ��������ʦ�� 2014, ��12����26-29.
����[17] Ѧ���ģ� �����ȣ� �̳�� ���ʽ���綯�������µ���Ʋ����о������[J].���콻ͨ��ѧѧ���� 2012, 31��5���� 1086-1090.
����[18] ��˼���� Safe Assure �� �� �� �� �� ȫ ϵ ͳ �� �� ʱ �� [EB/OL].http://archive.eet-china.com/www.eet-china.com.
����[19] ���������Ƴ�Ӳ������̽�⼰Ԥ������[EB/OL].http://www.eepw.com.cn/article/201602/287079.html.
����[20] Ӣ�����Ƴ����� 32 λ TriCore MCU �����������[EB/OL].http://tech.hqew.com/xinpin_580142.
����[21] Srivastava P, Karle M L, Karle U S. Development of Electrical Power AssistedSteering ��EPAS�� considering safety and reliability aspects as per ISO 26262[J].Automotive Sector, 2015��26���� 86-88.
����[22] Reorda M S, Violante M. Hardware-in-the-Loop-Based Dependability Analysis ofAutomotive Systems[C]// IEEE International Symposium on On-line Testing. 2006.
����[23] Bellotti M, Mariani R. How future automotive functional safety requirements willimpact microprocessors design[J]. Microelectronics Reliability, 2010, 50��9����1320-1326.
����[24] ��� ���٣� ���ס� �й���·�������ܰ�ȫ���������滮[J]. �й�������2017, ��23���� 122-125.
����[25] ʷ���ܡ� ���ҹ���·�������ܰ�ȫ������չ��״�����Ƶ�̽��[J]. ����ѧ��2016, ��4���� 30-34.
����[26] ���ƶ����������� ISO26262 ���ܰ�ȫ����������֤��Ŀ[EB/OL].http://tech.hexun.com/2015-11-02/180288355.html.
����[27] ISO26262 ��·�������ܰ�ȫ��ѵ[EB/OL].http://www.hirain.com/sts/116/113.
����[28] �Խ����� ��ȫ���ҹ��ܰ�ȫ����[J]. �о��뿪���� 2015, ��12���� 18-22.
����[29] ��塣 ���綯�����������������ʧЧ�Է��������о�[D]. ����������������ҵ��ѧ�� 2012.
����[30] �ŵ��塣 �綯���� VCU �������ϵͳ���������[D]. ���֣� ���ִ�ѧ�� 2016.
����[31] �Ŀ��� ���� ISO26262 �ĵ綯������϶���ϵͳ���ܰ�ȫ�������[J]. ���繤�̼����� 2012, ��12���� 23-27.
����[32] Ji X, Ge J, Tian H. Reliability improvement of electric power steering system basedon ISO 26262[C]// International Conference on Quality. 2013: 57-61.
����[33] �������� ����Ӣ�� ���ڹ��ܰ�ȫ�������������ĸ�����������[J]. �Ƽ���Ѷ��2017, ��8���� 81-86.
����[34] ��ꪣ� ���飬 ����� �������������ܰ�ȫ��ƺ��о�[J]. ��ľ˹��ѧѧ����2016, ��5���� 683-687.
����[35] ���ԣ� �������� �����Ρ� ���� ISO26262 ���������ӹ��ܰ�ȫ�������[J]. �Ϻ������� 2015, ��3���� 47-50.
����[36] ¬���� ���ܰ�ȫ�� ISO26262 ���������ӵ��������е�Ӧ��[J]. �������磬2016, ��20���� 124-125.
����[37] ��Ҷ�� ���� ISO26262�Ķ������ϵͳ��ѹ���ܰ�ȫ����[J]. �����㲿���� 2013,��10���� 97-100.
����[38] ��˹⡣ Ƕ��ʽϵͳ������ ISO26262 ��Ӧ���о�[J]. ���������� 2013, ��10����31-34.
����[39] ������ ���£� ����� ���ڵ�·�������ܰ�ȫ�� ISO26262 �� 7DCT ���ϵͳ���[J]. ���������� 2014, ��9���� 21-23.
����[40] ������ �����⡣ ���� ISO26262�Ķ����ܳ�ϵͳŤ�ذ�ȫ�������[J]. �Ϻ�������2017, ��10���� 25-29.
����[41] Khan J. ISO26262 system level functional safety validation for battery managementsystems in automobiles[C]// 2017 Innovations in Power and Advanced ComputingTechnologies ��i-PACT���� IEEE, 2018: 1-5.
����[42] ʯ������ �����ܰ�ȫҪ��� EPS ������Ӳ���ܹ����������[D]. ���֣� ���ִ�ѧ�� 2017.
����[43] Kwon H, Itabashi-Campbell R, Mclaughlin K. ISO26262 application to electricsteering development with a focus on Hazard Analysis[C]// IEEE InternationalSystems Conference, 2013: 655-661.
����[44] Wu X, Fei L, Lu X. Analysis of Impact of PMSM Failure on the Safety of EVunder ISO26262[J]. Automobile Technology, 2013, ��5���� 35-37.
����[45] Rivett R S. Hazard identification and classification: ISO26262- the application ofIEC61505 to the automotive sector[C]// Seminar on Sil Determination. 2010:87-97.
����[46] ��ʤ�� ����Դ������������ [M]. ������ ��ѧ��ҵ�����磬 2016: 40-52.
����[47] ׯ������ ���١� ���� ISO26262���ij����������ϵͳ����о�[J]. �����㲿���� 2016, ��12���� 18-21.
����[48] ��塣 ���綯�����������������ʧЧ�Է��������о�[D]. �������� ��������ҵ��ѧ�� 2013.
����[49] ������ �������ӹ��ܰ�ȫ�������Է����о�[J]. ���Ӳ�Ʒ���磬 2014, ��7����44-45.
����[50] Tang Z C, Zuo M J, Xiao N. An efficient method for evaluating the effect of inputparameters on the integrity of safety systems[J]. Reliability Engineering & SystemSafety, 2015: 120-124.
����[51] Kim S K, Yong S K. An evaluation approach using a HARA and FMEDA for thehardware SIL[J]. Journal of Loss Prevention in the Process Industries, 2013, 26��6����1212-1216.
����[52] Catelani M, Ciani L, Luongo V. The FMEDA approach to improve the safetyassessment according to the IEC61508[J]. Microelectronics Reliability, 2010,50��11���� 1230-1235.
����[53] Yanwen L, Xiyang W. Functional Safety Analysis for the Design of VCU Used inPure Electric Vehicles[C]// International Conference on Information Science &Control Engineering. IEEE Computer Society, 2017: 1004-1008.
����[54] Liu B, Li Y. Research on Vehicle Control Unit based on functional safety[C]// 20172nd Asia-Pacific Conference on Intelligent Robot Systems ��ACIRS���� 2017:160-164.
����[55] ����־�� �ƿ����� ���ڹ��ܰ�ȫ�� FMEDA �����ڵ��ӻ��������е�Ӧ���о�[J]. ������ƹ��̣� 2019, 27��02���� 135-139.
����[56] ���� �뵼������ʧЧ��������Ҫ�Լ��ؼ������о�[J]. �Ƽ����µ�����2009, ��10���� 4-4.
����[57] Takeichi M, Sato Y, Suyama K. Failure rate calculation with priority FTA methodfor functional safety of complex automotive subsystems[C]// InternationalConference on Quality. IEEE, 2011: 55-58.
����[58] ֣ΰ�� �����ġ� �������ɰ�ȫϵͳӲ���ܹ����ܰ�ȫ�������[J]. �����Ƽ���2014, ��6���� 55-60.
����[59] ����ѫ�� �½����� ���ڡ� �綯��������������������ܰ�ȫ�ܹ��о�[J]. ��������Ϣ������ 2018, ��3���� 12-16.
����[60] Hyun K H. Design of a speed controller for permanent magnet synchronous motorin pure electric vehicle applications[C]// International Conference on Control. 2007:1623-1628.
����[61] ��ΰ�� ���綯�ͳ���������ϵͳ�ݴ����Ʋ����о�[D]. ���֣� ���ִ�ѧ�� 2016.
����[62] ������ �綯�������������������������������Ʋ����о�[D]. ���֣� ���ִ�ѧ��2014.
����[63] ����⡣ ���綯�����������������о�[D]. �Ϸʣ� �Ϸʹ�ҵ��ѧ�� 2012.
����[64] ����ɽ�� ���綯�����������������������Ʋ����о�[D]. �人�� �人������ѧ��2014.
����[65] Zhai Z Q, Zhang X N. Study on Control Strategy for Regenerative Braking ofElectric Vehicles[J]. Applied Mechanics and Materials, 2013, ��273���� 669-672.
����[66] Han J, Kwon Y, Byun K. A Fault Tolerant Cache System of Automotive VisionProcessor Complying With ISO26262[C]// International Symposium on Circuitsand Systems ��ISCAS���� 2016: 2912-2912.
����[67] ���ܡ� ����ģ�͵���Ƽ���Ƕ��ʽʵ��[M]. ������ �������պ����ѧ�����磬2010: 78-91.
����[68] Song P, Zong C F , Zheng H Y. Rapid Prototyping for the Vehicle Control Unit of aFull Drive-by-Wire Electric Vehicle[J]. Advanced Materials Research, 2013, ��2����
����694-697[69] Adedjouma M, Smaoui A. Model-Based Computer-Aided Monitoring forISO26262 Compliant Systems[C]// International Symposium on SoftwareReliability Engineering Workshops ��ISSREW���� 2018: 349-352.
����[70] �������� ���� MATLAB/SimuLink ƽ̨���������������[J]. ����ʵ�ü�����2012, ��4���� 33-37.
����[71] Zhang G, Zhang H, Li H. The Driving Control of Pure Electric Vehicle[J]. ProcediaEnvironmental Sciences, 2011, ��10���� 433-438.
����[72] Wang Y, Liu Y. Electronic control system design and test of pure electric vehiclebattery management system[C]// Second International Conference on MechanicAutomation & Control Engineering. 2011: 1289-1292.
����[73] �塣 ���� CAN ����ϵͳԭ�������Ӧ��[M]. ������ ���ӹ�ҵ�����磬 2010:32-48.
��л
����ʱ������ˮ��һȥ��������ת�ۼ���������о�����ҵ�ε����ı�д�������ı�д����β�����У��ܽ����Լ������������ʱ�⣬ͬʱҲչ�����Լ���δ������������ѧ�������������У��ջIJ���������ѧ����������ʵ�������������ߣ���������ڵ�ʦָ���ʹ����£�ѧϰ�����ͽ�����ⷽ�����������Լ��۽����չ��ֵ�������ͬʱ�Լ�Ҳ�ɳ��˲��٣�������������ʱ����ջ����������µ������ջ����ĵ��Լ�Ҳ�����������������⼴����ҵ����֮�ʣ������Եظ�л�����ǵ�ָ����ػ������Ҳ��ϵسɳ���
����������Ҫ��л�����ҵĵ�ʦ�̰�����ڣ���Ϊ������Ϥ��ָ�����������������ﲻ�ϵijɳ�������ʦ������ѧ���Ϻ���ʵ���ϸ������Һܴ�İ�����ͬʱҲ����������������������������������ѧ�����������ϣ��̻������������ѧ���ķ�����ͬʱҲ��������һ���Ͻ���ϸ�ĶԴ�ѧ����ϰ�ߡ��ڹ���ʵ���ϣ���Ϊ����ʦ���Ƽ������������Ҳ�����Ŀʵϰ�����ҵĹ���ʵ�������õ��˺ܺõ��������������У���ҵ�����ڶ��������������������Ӱ�������ǡ�һ�������������£�̤̤ʵʵ���˵Ľ̻壬��Ϊ������������Ҫ�������������������ͬʱҲ�������ڳ���ʦ��ָ���ʹ����£�Ϊ�Լ��о������Ļ���Բ����š�
��������֮�⣬�һ�Ҫ��лʵ���ҵ�������ʦ��������ʦ����������ʦ�����ҵ�ѧϰ�ϸ����˵İ�����ָ������л�������ʦ��������ʦ�������ϵİ����ͷ��������ǵ�����������
������θ�л�������̩�ƹ�˾�ĸʺ�����ʦ��������˾ʵϰ��ʱ��������ڹ���������ѧ������������ܣ�ͬʱ��������Ҳ�����˺ܶ�Ĺ��������������˳���������ʵϰ����Ҫ��л���������о�Ժ��ͬ���ǣ�������ʵϰ��ʱ�������Ϊ�����ǵĹ����������������һ��˳���ƽ���Ŀ�������˴˹�ͬ�ɳ���
����Ȼ���л��һ���ж���ʦ��ʦ���ǣ��Լ���һ����ɿ�����Ŀ�IJ���������Сɺ�����ﺭ�������Լ���ˬͬѧ����Ϊ��Ҷ���һ�Ų�иŬ����������ģ��ڱ˴�������£����Ͻ��������ϳ�Խ�Լ���
������Ȼ��Ҫ��л����������Լ�����л����ѡ������������Լ�����л�������ﲻиŬ�����Լ���Ըδ�����Լ��������ģ�����ʵ����ѵ�ԣ�����ǰ�С�
����������ĸ�л������������μӴ��ĸ�λר�ң�
��������Ҫ�鿴��ƪ��ҵ���ȫ�ģ�������ϵ�ͷ���ȡ��