24小时论文定制热线
24小时论文定制热线
摘 要
在智能交通控制系统中,交叉路口的车辆控制一直以来都是学术界所关注和研究的热点。目前,交叉路口控制都是基于传统红绿灯控制方法,但是由于其采用固定间隙导致系统性能不佳,因此诸多专家学者试图通过实时控制方法来确定红绿信号灯的最佳时隙,然而由于交通控制具有动态灵活性,使得该实时控制方法相对比较困难。
车载网络等相关技术的快速发展,使得车辆之间能够互相通信、协同处理相关数据。因此,为了解决传统红绿灯交通控制的困境,我们在本文中提出了一种新颖的方法:基于车辆通信的控制。相对比传统交通信号灯,我们使车辆之间通过消息传递进行交换信息,从而协调车辆安全行驶通过交叉路口。与以往车辆控制方法不同,此算法中我们通过"车辆"来实行交通控制而不是通过控制十字路口红绿灯的时间间隙来调度车辆行驶。
在此项工作中,我们首先将交叉路口车辆交通控制问题进行重新定义,建模为经典互斥算法问题中的新的变种问题,然后基于新的问题提出了集中式控制算法和分布式控制算法;同时,对所提出的算法进行理论上的分析、证明。另外,通过质疑多种可能出现的情况,例如死锁、饥饿等现象,从而进行证明确保该算法的可行性以及正确性。
基于 Ubuntu10.10 系统上采用 Network Simulator-3 版本,本文根据所提出的集中式控制算法、分布式控制算法与传统红绿灯控制算法进行大量的模拟仿真实验,同时对实验仿真结果所得的性能指标进行分析、比较、总结。仿真结果表明,与传统红绿灯控制算法相对比,集中式控制算法和分布式控制算法在平均等待队列长度、系统吞吐量、平均等待时间等方面都更具有优势。我们还在 TinyOS 实 验系统上部署小车实验,将现实小车模拟为模型智能小车,实验表明,在我们所提出控制算法下,处于交叉路口的车辆能够有序、协调、安全、高效地通过交叉控制路口。
关键词:分布式算法,智能交通系统,互斥,交通控制,车辆自组织网络
ABSTRACT
Intersection vehicle control has always been the academic community concern and research hot spots in intelligent transportation systems. Because of the poor system performance based on the traditional traffic light, experts try to determine the optimal time slot of the traffic light in real-time flexible way. However, it is a relatively difficult task in real-time control due to the dynamic of traffic control.
With the rapid development of vehicle network, vehicles can communicate and coordinate managing data with others. In order to avoid the weakness of traditionaltraffic light, we put forward an innovative method based on vehicle communication control in this paper. Compared to traditional traffic light, we control vehicles via intersection through exchanging of messages. Unlike conversional vehicle control methods, we control traffic by "vehicle" rather than setting the slots of traffic light, which overcome the drawbacks of inefficiency in traditional traffic light.
In this work, we redefine intersection vehicular traffic control problems and model a new variant of the classic mutual exclusion algorithm. Then, we propose centralized control algorithm and distributed control algorithm and have proved the algorithms in theory. Moreover, we ensure the feasibility and correctness of the algorithm through analyzing some phenomena, such as deadlock, starvation.
The author conducts extensive simulations to analyze and evaluate the performance of our proposed approach based on Ubuntu10.10 system and Network Simulator-3 version. The results show that, our approach is more efficient than traditional traffic light, such as average waiting time, outputs and so on. We also deploy intelligent cars on TinyOS operating system to simulate real-time traffic based on the centralized control algorithm. The simulating results show that our algorithms can orderly, coordinately, safely and efficiently control vehicles via the intersection.
Keywords: distributed algorithm、intelligent transportation system、mutual exclusion、traffic control、vehicular ad hoc network
目 录
第一章 绪论
这一章先介绍本课题研究的背景和相关领域的目前发展情况,然后再阐述本课题大体的研究内容,最终给出本文的整体框架。
1.1 研究背景
随着经济的快速发展和社会的不断进步,城市人口和车辆越来越多,城市道路的通信能力已经是无法满足其日益增长的需要,交通拥挤和堵塞的现象也日益变得严重起来,全世界各个国家都面临着交通污染、事故、能源消耗,以及所带来的一切后遗症等问题,都亟需得到解决。
智能交通系统(Intelligent Transportation System,ITS [38][44][45][46])是对工业革命以来传统交通系统的变革,具有信息化、智能化、集成化等特点,能够通过信息的交互保证人、车、路与环境之间更好的协调工作,从而在一定程度上提高了交通系统的机动性、安全性和效率,同时能够保护环境,降低资源消耗。智能交通系统[10]通过采用先进的数据通信技术、信息技术、电子传感技术、信号采集等有效的手段集成运用于整个交通控制管理体系,从而可以建立起一种实时、高效、准确的综合运输的管理系统。随着传感器网络技术、3S 技术、通信技术、GIS 技术、Ad Hoc 技术的快速发展,智能交通信息的采集变得更加准确完备,从信息的广度,精度,内容各方面都取得一定的进展,通过传感技术获取车体自身以及周围环境的状态信息,经过算法对其进行分析、处理,最终能取代人的角色从而操控车辆的运行的想法也愈加成熟可行,更能降低日趋严重的交通事故发生率,提高道路交通的效率。
智能交通系统的应用存在于社会各个方面,从移动电子导航,防碰撞预警,辅助驾驶到全自动驾驶,都有涉及其研究背景。移动电子导航可以为驾驶员提供一定的信息,包括认路、指路、最佳路线的选择,驾驶员只需依据电子地图,行驶方向箭头以及其系统所发出的行驶指令开车,同时移动电子导航还能够接收相关地区的最新交通状况,及时更新有关的信息,从而使车辆始终沿着最合理的路线行驶;防碰撞预警则对于车在前进以及倒车时的碰撞进行及时提醒,进入驾驶盲点时能够自动为驾驶员提供预警信息,车辆起步或车辆改变原先的车道时给予提示,同时,还能够检测道路的人流状况,避免与行人发生碰撞,如果驾驶者由于没办法及时做出必要举措时,还能够强行控制转向或操作车辆,使其处于安全状态,从而使车辆更好安全高效地行驶。而对于辅助驾驶,我们统称为智能巡航控制系统(Intelligent cruise control system, ICCS),其主要目标是对于某些特殊情况下,能够对驾驶员帮助的作用,比如根据发动机工作情况调节油门开度,以及保持安全车距,在变道或车辆超速时,调节最佳车速和最佳车距等。
交字路口车辆之间的互相协作为智能交通控制的重要部分之一,它涉及到车辆间应该统一规定哪些标准,以及维护对应的信息,并且保障车辆间的信息交互的可靠性、实时性。传统的交通控制基本上都是基于红绿灯时间间隙而对车辆的通行做出协调,这样需要人为主动去控制车辆,经红绿灯的引导而通过十字路口。
由于采用固定时间间隙控制方法,这样可能导致效率相对比较低下,另外还加入了人为主动错误操作,比如酒驾、超速、抢灯、闯灯等事件的发生,从而会引起更多的潜在问题,没办法实现智能交通驾驶。
1.2 领域现状
交叉路口的交通控制已经成为智能交通系统研究的热点之一[10].现有交叉路口控制方法则可以分为两类,一种是依赖数学交通流模型,另一种是利用计算智能,从而更优地控制绿灯的时隙。前者的方法比较复杂并且很难满足实时交通的需求,后者[41]则是红绿灯新的发展阶段。各种智能计算技术,如人工神经网络[3][34]、模糊系统[16][29]、群体智能和进化计算算法[8][23]、甚至是强化学习[30],都已经在交通控制中使用流量控制手段。目前,先进的传感和通信技术[37]使得能够对绿灯控制进行实时交通响应[22][43].另外,一些学者通过利用传感器网络,对道路车辆流量信息进行采集、处理从而更实时自适应的控制整个交通系统[43].然而,由于交通负载的动态性和交通控制系统是大型复杂的非线性随机系统,所以导致了很难设置绿灯的最佳时间间隙,即使存在一定的可能性[41][42].此外,智能计算方法的复杂性,使得上述方法很难在实时交通控制中得到推广。
对于交叉路口交通控制,轨道机动的方法是在个人快速交通系统[1][6][26]中首先被提出来的,而个人快速交通系统则是根据最佳机动组合来控制车载安全通过路口。有些算法[13][26]则是利用基于单元的交叉预定系统来控制车辆,其中,交叉路口被分为细胞集,并使用路口管理程序来协调细胞的占有率,使得智能车辆(Automatic Vehicle, AV)安全通过。合并算法[31]使用控制器基础设施通过解决最优问题来计算合并车辆的最佳机动组合,从而降低车辆驾驶的最大时耗。有些交通控制工作[27]是从模糊逻辑中得到启发,并且其性能通过实时实验成功得到验证。基于情景的轨迹调整算法[15]则是通过计算多个场景变化的可能性,包括车辆横向或是纵向变化时需调整相应车道、速度的变化,从而控制车辆的运动轨迹。该轨迹调整算法依赖于安全的替代措施,如实时碰撞和测量措施。另外还有基于全局调整和异常处理[22]等控制方法,这些方法难度相对比较大并且复杂,主要因为交叉路口情况相对复杂,考虑因素过多,导致计算量大。
虽然很多专家学者在交通控制方面投入了很大的精力,也产生了很多相应的成果,但是他们的方向主要都集中于交通调度和机动车道的最优或是次优解决方案上面。交通控制复杂的优化问题以及交通流的动态性,使得现有的解决方案在计算和信息方面也变得复杂和昂贵。从这个角度出发,本课题的研究则具有很大的意义,因为它所涉及的分布式算法没有集中控制设备,另外优化问题不涉及到个别车辆。我们的设计是基于车辆互斥问题(VMEI),它是传统互斥问题[21][25][33]
的变种,所有节点在临界区(CS)中竞争资源。尽管也有专家学者定义了其它相关互斥问题的变种形式,但是都不能描述交通路口的控制问题。
在相关文献[5][12][32]中,相关学者已经将传统的互斥问题变种为在同一时刻最多有 k 个结点能够同时访问临界区(CS)。而车辆互斥问题中,由于交叉路口有多条车道,处于并发关系的车辆能够同时通过交叉路口,而处于冲突关系的则不允许。在另外一些文献中,则以组形式的互斥问题[4][19][20],允许相同属性(sessions)(属于同一组)的节点能够同时访问临界区,同一属性可以被认为具有共享同一资源的性质。如此,组互斥问题则与车辆互斥问题(VMEI)类似,有多个车道的车辆能够同时通过交叉路口。哲学家就餐(DP)问题[11][24][9][35][36]中,处于吃状态(Eating)的进程(节点)之间才会发生互斥现象。而饮水问题[7] [14] [28]
[39]则是根据哲学家进餐(DP)问题进行变种,其中对于一个资源请求,对应有一个最大的资源集合;同时,每个临界区(CS)能够设定允许访问的最大任意子集,也就是说进程(节点)周边邻居根据资源访问要求而动态变化。因此,本文的车辆互斥问题[2]是在 DP 问题上充分考虑了 Ad Hoc 网络特性而进行扩展。
本文工作受到最新汽车技术发展启发,车载网(VANET)[17]使得车辆与其它车辆(V2V)能够通过无线通信进行沟通。车辆不仅能够对它所在环境的信息进行收集,同时,它们也能够与其它车辆进行实时信息的交互。另一方面,以传感器和嵌入式为技术的自主车(AV)也越来越变得更加具有可行性和实用性,比如上面提到的已经在道路上行驶的谷歌无人驾驶汽车[48].本文中所提出的针对十字路口智能交通控制的集中式和分布式控制方法,目前类似的成果还没见诸于相关文献中,是一个比较新颖的课题研究。
1.3 主要工作
首先,本文针对十字路口的交通控制系统进行分析,在充分理解已有专家学者的相关工作基础上,对经典的互斥算法进行合理地变种,将其转变为新的互斥问题。针对新变种车辆互斥问题(VMEI Problem),特别是根据不同车道以及车辆的互斥以及并发关系从而设计出两种针对性的互斥算法:集中式算法和分布式算法。
其次,详细介绍集中式算法和分布式算法,以及算法中所涉及到的数据结构、消息类型的定义,同时阐述两种算法的相关操作。然后从新的互斥问题所涉及的安全性、活动性、公平性方面对算法进行理论上的分析、证明,确定算法的正确性和有效性。
最后,在 Network Simulato-3 的仿真软件条件下,基于所提出的两种算法进行大量仿真实验,取得算法的相关性能指标;同时对平均队列长度、平均等待时间等算法性能指标进行分析、对比、总结。另外,还在 TinyOS 系统平台下,对交叉路口集中式控制算法进行更加真实的仿真实验。实验结果表明,在该算法控制下车辆能够有效协作地通过交叉路口,并且与传统红绿灯控制方法相对比,各性能指标相对高效。
有关该课题的工作文章已经投到相关期刊(IEEE Transactions on Parallel andDistributed Systems(TPDS) )。下一阶段将对算法有关方面进行改进,使其更适合多种路况,并且降低算法的消息开销以及提高相应的性能。
1.4 组织架构
本文内容将分为七个章节:
第一章:绪论。主要介绍所研究课题的相关背景和现实意义,以及阐述了目前相关领域的研究现状和该课题主要研究的内容。
第二章:描述和定义系统模型。主要是介绍所要解决十字路口交通信号控制的问题,并且对问题重新定义,将其变种为新的互斥问题(VMEI),同时对问题给出正式定义,以及对问题相关要素进行阐述说明。
第三章:集中式控制算法。首先详细阐述了集中式控制算法;其次对算法中相关符号、消息类型给出正式的符号声明、定义;最后,对集中式控制算法的具体操作做出解释,以及画出系统车辆状态的转换图。
第四章:分布式控制算法。针对集中式控制算法的弱点,本章提出了分布式控制算法,同时对算法中所涉及到的符号、消息类型等数据结构进行阐述,并且详细介绍分布式控制算法的具体操作步骤。
第五章:算法证明。该部分从理论上对算法的各个方面进行证明,从算法中所涉及到车辆的安全性、活动性、公平性、效率性等方面进行证明;另外,对于解决死锁、饥饿等相关现象也进行了论证。
第六章:结果评估与分析。首先对相关平台(Ubuntu11.10)、环境(NS3)进行简单地介绍;其次,对算法对比过程中,所需要的相关性能指标进行定义;再次,根据 NS3 仿真实验所得的结果,进行综合分析、比较;最后,在实际应用环境中部署小车,并且对其中的集中式控制算法进行实验模拟。
第七章:总结与展望。对全文进行了总结,提出本文的创新点和优缺点,同时指出下一步的改进的方向。
第二章 系统模型与问题定义
2.1 系统模型与定义
2.1.1 车道和交叉路口(The Road and Intersection)
2.1.2 车辆和无线网络(The Vehicle and Wireless Network)
2.2 交叉路口车辆互斥问题(VMEI Problem)
2.3 本章小结
第三章 集中式算法
3.1 控制锁(The Locks)
3.2 数据结构和消息类型
3.3 算法操作
3.3.1 请求操作(Operations of Request)
3.3.2 通行操作(Operations of Passing)
3.3.3 解锁操作(Operations of Release)
3.3.4 车辆状态流程(Flow of Vehicle State)
3.4 本章小结
第四章 分布式算法
4.1 数据结构和消息类型
4.2 算法操作
4.2.1 请求操作(Operations of Request)
4.2.2 通行操作(Operations of Passing)
4.2.3 解锁操作(Operations of Release)
4.2.4 车辆状态流程(Flow of Vehicle State)
4.3 本章小结
第五章 算法证明
5.1 安全性
5.2 活动性
5.3 公平性
5.4 本章小结
第六章 性能评估
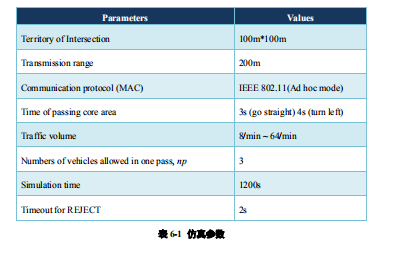
6.1 环境配置
6.2 参数设置
6.3 结果分析
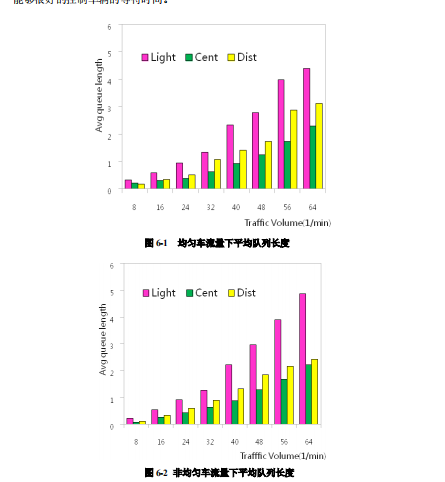
6.3.1 平均队列长度
6.3.2 平均等待时间
6.3.3 系统吞吐量
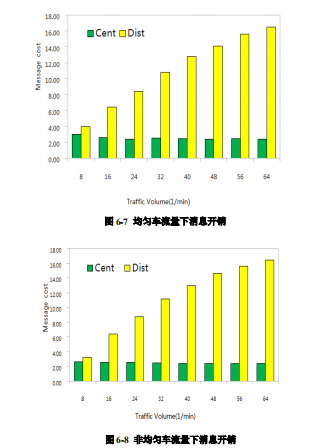
6.3.4 消息开销
6.4 交通模拟
6.5 本章小结
第七章 总结与展望
本章主要是对本课题进行全面性的总结,主要是对阐述过的主要内容、证明、以及相关的实验室进行必要性的说明。同时,指出该课题相关研究工作的主要贡献和不足,并且对以后的研究工作进行展望。
7.1 总结
随着经济的快速发展,城市的交通问题越来越严重,导致所引发的交通阻塞越来越受到人们的关注,亟待解决。然而,对于我国而言交通基础设施落后,相应的交通管理措施、技术手段也跟不上需求的发展,车祸、塞车、资源浪费等问题日益变得严重起来。因此,在交通控制方面亟须技术的革新,特别是关于车辆调度手段、智能控制技术。
相对比传统的红绿灯控制方法,本文提出了两种比较新颖的交叉路口控制方法,能够有效在替代红绿灯的功能,并且,目前先进的交通通信技术、车载网相关技术都为该算法奠定了基础。对于交叉路口智能控制这一课题来说,已经有诸多学者在致力于这方面的研究,同时也取得相应的成果,比如自适应的红绿灯控制算法、严格控制车辆通过交叉路口的速度使得车辆安全交通路口等方面。另外,由于新的人工智能技术发展,目前已研制出相关智能车辆,使得交通控制进一步得到发展,不过由于该车辆需要基于比较先进的基础设施,同时属于单机版模式,缺乏车辆之间的协调。因此,本人所提出的关于集中式控制算法和分布式控制算法,则更加具有实用性和前瞻性。
在集中式控制算法中,我们通过在交叉控制核心区域中部署集中式控制设备,当车辆进入交叉路口相应车位时则发送请求消息;集中式控制设备收到来自车辆的请求消息之后进行判断是否允许通过,并且为了防止其它车道发生饥饿现象,设定了每一车道每次可以通过车辆数,进而发送允许通过消息;在车辆收到来集中式控制设备允许通过的消息之后,安全驶过交叉路口核心区域,同一车道最后通过车辆须发送解锁消息,从而使得整个系统能安全运行。该算法中,由于集中式控制设备维护整个系统车辆的信息,因此,在控制方面相对比较之下更具有优势,无论从并发机制,或是性能指标方面。
为了避免集中式可能发生单点故障现象,同时部署中间控制设备需要耗费相应的资源,并且当集中式控制设备有故障情况下进行替换,可能对于实时交通控制而言缺乏灵活性,故我们提出了分布式控制算法。分布式控制算法中,车辆通过交叉路口完全由车辆通过消息传递进行协调,同时了为了使得处于并发关系的车道所在车辆能够并发通过交叉路口,我们增加了剥夺条件,从而提高了系统的效率。
另外,我们对集中式算法和分布式算法进行了相关性的证明。在证明的过程中,首先我们对这两种算法进行了详细的描述,并对相关的消息进行定义,对消息操作进行阐述;其次,定义了算法是否能够保证车辆的相关安全、活跃、公平、效率等性质;再次,我们对这些性质进行了理论上的分析、证明,包括对死锁、饥饿现象。最后,我们通过在 Ubuntu10.10 平台上所建立起来的 NS3 环境下,对这两种算法进行了实验仿真,并对仿真实验结果进行分析、对比。结果显示,集中式算法和分布式算法与传统的红绿灯控制算法相对比,其相关性能指标(平均等待队列长度、平均等待时间、系统吞吐量)都具有一定的优势。而在集中式算法与分布式算法的对比中,集中式控制算法之下车辆的消息开销相对比较小,源于集中式控制设备的作用,而分布式控制算法消息开销多主要是因为车辆要通过拒绝消息(REJECT)来保证车辆的安全。
文章最后部分,主要是在实际环境下对集中式控制算法进行更加真实的仿真,用模型智能小车模拟现实小车,验证该算法之下是否能够使得车辆安全协调通过交叉路口。实验结果表明,在集中式控制算法之下,处于交叉路口的车辆能够正常有序地通过交叉控制路口。
总之,与传统的红绿灯控制算法、轨道机动控制算法相对比,集中式控制算法和分布式控制算法相对比较简单,也具有较高的效率。
7.2 展望
本课题主要是针对交叉路口车辆控制进行研究,分析、总结该课题的关键之后,提出了集中式控制算法和分布式控制算法,这两个算法与传统红绿灯、机动轨道等控制算法相对比,其相关性能指标具有很大的优势,根据调查,在交叉路口车辆控制方面,这两种算法目前是最新的,并未见诸于各文献资料中,故其产生的相关性问题也需要各位学者进行改进、完善。
车辆采用消息传递作为协调作用的控制算法,本来也存在一些不足。在集中式控制算法中,虽然部署集中式控制设备能够维护全局车辆的信息,从而进行车辆调度工作,但是存在相关的隐患,比如单点问题应该如何解决;在分布式控制算法中,根据仿真实验结果来看,消息开销过大,如何降低系统消息数、更好地控制网络操作以及避免意外情况的发生,这些问题都需要在进一步的工作过程中,加以考虑、改进、提高,从而完善这些算法。
参考文献
[1] B. van Arem, C. J. G. van Driel, and R. Visser, "The impact of cooperativeadaptive cruise control on traffic-flow characteristics," IEEE Trans. Intell. Transp.Syst., vol. 7, no. 4, pp. 429-436, Dec. 2006.
[2] H. Attiya, A. Kogan, J. L. Welch, "Efficient and Robust Local Mutual Exclusionin Mobile Ad Hoc Networks," IEEE Trans. Mob. Comput. 9(3): 361-375, 2010
[3] E. Bingham, "Reinforcement learning in neurofuzzy traffic signal control," Eur. J.Operat. Res., vol. 131, pp. 232-241, 2001.
[4] V. Bhatt, C.-C. Huang, "Group mutual exclusion in O(log n) RMR," The 29thACM symp. on Principles of Distributed Computing (PODC), pages 45--54, Jul.2010.
[5] S. Bulgannawar, NH Vaidya, "A distributed K-mutual exclusion algorithm,"Proceedings of the 15th International Conference on Distributed ComputingSystems, IEEE, Vancouver, Canada, 1995, pp. 153-160
[6] R. J. Caudill and J. N. Youngblood, "Intersection merge control in automatedtransportation systems," Transp. Res., vol. 10, no. 1, pp. 17-24, Feb. 1976.
[7] K. M. Chandy, J. Misra, "The Drinking Philosopher's Problem," ACM Trans.Program. Lang. Syst. 6(4): 632-646 (1984)
[8] X. Chen and Z. Shi, "Real-coded genetic algorithm for signal timings optimizationof a signal intersection," The First Int'l Conf. on Machine Learning andCybernetics, 2002.
[9] M. Choy and A.K. Singh, "Efficient Fault-Tolerant Algorithms for DistributedResource Allocation," ACMTrans.Programming Languages and Systems, vol. 17,pp. 535-559, 1995.
[10]I. Day, "Scoot-split, cycle and offset optimization technique," TRB committeeAHB25 adaptive traffic control, 1998.
[11]E. W. Dijkstra, "Hierarchical Ordering of Sequential Processes," Acta Inf. 1:
115-138 (1971)[12]D. Dolev, E. Gafni, N. Shavit, "Toward A Non-atomic Era: l-Exclusion As A TestCase", Proceedings Of The 20th Annual ACM Symposium On The Theory OfComputing, 1988, pp. 78-92.
[13]K. Dresner and P. Stone, "A multiagent approach to autonomous intersectionmanagement," J. Artif. Intell. Res., vol. 31, no. 1, pp. 591-656, Jan. 2008.
[14]D. Ginat, A. U. Shankar, "Agrawala AK: An efficient solution to thedrinking philosophers problem and its extensions," Proc 3rd InternationalWorkshop on Distributed Algorithms. Lect Comput Sci, vol 392.Springer, Berlin Heidelberg New York 1989, pp 83-93
[15]S. Glaser, B. Vanholme, S. Mammar, D. Gruyer, and L. Nouvelière,"Maneuver-based trajectory planning for highly autonomous vehicles on real roadwith traffic and driver interaction," IEEE Trans. Intell. Transp. Syst., vol. 11, no. 3,pp. 589-606, Sep. 2010.
[16]B. P. Gokulan and D. Srinivasan, "Distributed geometric fuzzy multiagent urbantraffic signal control," IEEE Trans. Intell. Transp. Syst., vol. 11, no. 3, pp.714-727, Sep. 2010.
[17]H. Hartenstein, and K. P. Laberteaux, "A tutorial survey on vehicular ad hocnetworks", IEEE Comm. Mag., vol. 46, no. 6, pp.164 - 171, June 2008.
[18]A. D. Joseph, A. R. Beresford, J. Bacon, et al, "Intelligent TransportationSystems," IEEE Pervasive Comp., vol. 5, pp. 63-67, 2006
[19]Y.-J. Joung, "Asynchronous group mutual exclusion," Proceedings of the 17thAnnual ACM Symposium on Principles of Distributed Computing (PDOC), pages51-60, Puerto Vallarta, Mexico, June 28-July 2 1998.
[20]P. Keane and M. Moir, "A simple local-spin group mutual exclusionalgorithm," Proceedings of the 18th Annual ACM Symposium onPrinciples of Distributed Computing (PODC'99)。 pp 23-32. ACM Press,1999
[21]L. Lamport, "A Fast Mutual Exclusion Algorithm," ACM Transactions onComputer Systems, 5(1):1-11, 1987
[22]J. Lee, B. Park, "Development and Evaluation of a Cooperative VehicleIntersection Control Algorithm Under the Connected Vehicles Environment,"IEEE Transactions on Intelligent Transportation Systems 13(1): 81-90 (2012)
[23]P. Lertworawanich, M. Kuwahara, M. Miska, "A New Multiobjective SignalOptimization for Oversaturated Networks," IEEE Trans. Intell. Transp. Syst., vol.12, no. 4, pp. 967-976, Nov. 2011.
[24]N. A. Lynch, "Upper Bounds for Static Resource Allocation in a DistributedSystem," J. Comput. Syst. Sci. 23(2): 254-278 (1981)
[25]M. Maekawa, "An Algorithm for Mutual Exclusion in Decentralized Systems,"ACM Trans. on Comp. Sys., vol.3, no. 2, pp.145-59, 1985
[26]F. J. McGinley, "An intersection control strategy for a short-headway P.R.T.network," Transp. Plan. Technol., vol. 3, no. 1, pp. 45-53, IEEE Trans. Intell.Transp. Syst., vol. 13, no. 1, Mar. 2012
[27]V. Milanés, J. Perez, E. Onieva, and C. Gonzalez, "Controller for urbanintersections based on wireless communications and fuzzy logic," IEEE Trans.Intell. Transp. Syst., vol. 11, no. 1, pp. 243-248, Mar. 2010.
[28]S. L. Murphy, A. U. Shankar, "A note on the drinking philosophers problem,"ACM Trails Program Lang Syst 10 (1): 178-188 (1988)
[29]L. A. Prashanth, S. Bhatnagar, "Reinforcement Learning with FunctionApproximation for Traffic Signal Control," IEEE Trans. Intell. Transp. Syst., vol.12, no. 2, Jun. 2011.
[30]J. Qiao, N. D. Yang, and J. Gao, "Two-stage fuzzy logic controller for signalizedintersection," IEEE Trans. Syst., Man Cybern. A, Syst. Humans, vol. 41, no. 1, pp.178-184, Jan. 2011.
[31]G. Raravi, V. Shingde, K. Ramamritham, and J. Bharadia, "Merge algorithms forintelligent vehicles," in Next Generation Design and Verification Methodologiesfor Distributed Embedded Control Systems, S. Ramesh and P. Sampath, Eds.Amsterdam, The Netherlands: Springer-Verlag, 2007, pp. 51-65.
[32]V. A. Reddy, P. Mittal, I. Gupta, "Fair K Mutual Exclusion Algorithm for Peer toPeer Systems," Proc. Int'l Conf. on Dist.Comp. Sys. (ICDCS), 2008.
[33]G. Ricart, and A.K. Agrawala, "An Optimal Algorithm for Mutual Exclusion inComputer Networks," Communications of the ACM, vol. 24, pp. 9-17, Jan. 1981
[34]D. Srinivasan, M. C. Choy and R. L. Cheu, "Neural networks for real-time trafficcontrol system," IEEE Trans. Intell. Transp. Syst., vol. 7, no. 3, pp. 261-272, Sep.2006.
[35]P.A. Sivilotti, S.M. Pike, and N. Sridhar, "A New DistributedResource-Allocation Algorithm with Optimal Failure Locality," Proc. 12th Int'lConf. Parallel and Distributed Computing and Systems, pp. 524-529, 2000.
[36]Y.-K. Tsay and R. Bagrodia, "An Algorithm with Optimal Failure Locality forthe Dining Philosophers Problem," Proc. Eighth Int'l Workshop DistributedAlgorithms (WDAG), pp. 296-310, 1994.
[37]M. Tubaishat, P. Zhuang, Q. Qi, Y. Shang, "Wireless sensor networks inintelligent transportation systems," Wirel. Commun. Mob. Comput., vol. 9, no. 3,Mar. 2009.
[38]F. Wang, "Parallel Control and Management for Intelligent TransportationSystems: Concepts, Architectures, and Applications, "IEEE Trans. Intell. Transp.Syst., vol. 11, no. 3, Sep. 2010.
[39]J. L. Welch, Nancy A. Lynch, "A Modular Drinking Philosophers Algorithm,"Distributed Computing 6(4): 233-244 (1993)
[40]W. Wu, J. Cao, and J. Yang,"A fault tolerant mutual exclusion algorithm formobile ad hoc networks," Pervasive and Mobile Computing, Vol. 4, No 1, Feb.2008, pp 139-160.
[41]D. Zhao, Y. Dai, Z. Zhang, "Computational Intelligence in Urban Traffic SignalControl: A Survey," IEEE Trans. on SMC-Part C, Preprint, Nov. 2011
[42]L. Zhao, X. Peng, L. Li, and Z. Li, "A fast signal timing algorithm for inpidualoversaturated intersections," IEEE Trans. Intell. Transp. Syst., vol. 12, no. 1, Mar.2011
[43]B. Zhou, J. Cao, X. Zeng, H. Wu, "Adaptive Traffic Light Control in WirelessSensor Network-Based Intelligent Transportation System," IEEE 72nd Vehi. Tech.Conf. Fall (VTC 2010-Fall), Sep. 2010.
[44]SCATS, http://www.scats.com.au/, Retrieved Nov. 2011
[45]VICS, http://www.vics.or.jp/, Retrieved Nov. 2011
[46]VII, http://www.vehicle-infrastructure.org/, Retrieved Nov. 2011
[47]ns3, http://www.nsnam.org/, Retrieved Nov. 2011
[48]Google driverless car, http://www.wikipedia.org/, Retrieved Nov. 2011
致谢
首先感谢***老师,在研究生阶段给了我很大的支持,先是根据我的兴趣帮助我确定所研究的方向,并且在我碰到困难而无力解决时,能够负责地与我进行讨论,并且认真地对我进行指导和解答我的疑问。在写毕业设计和毕业论文的过程中,***为本文算法在分析、论证方面提出了宝贵意见,并且在模拟仿真实验中为我分析了相关疑问;在论文写作上,更是秉着认真负责的态度,指导我完成该论文的撰写工作。***严谨的研究作风和认真负责的工作态度对我产生了很大的印象;同时,***为人实在、平易近人的风格,更是为即将踏上工作道路上的我树立了一个厚重的榜样。另外,经过***多次对本论文的点评和指导,该论文质量有了很大的提高,感谢***能够在繁忙中抽出时间帮助我完成毕业论文。
感谢***同学和***同学,在相关研究方面给予的无私帮助,特别在设计算法和模拟仿真中,能够一起讨论从而拓展我的思路,并且认真回答相关的疑惑;在物理模拟实验中,感谢***同学对实验的支持,能够将所提出的算法应用到模拟环境中,并且验证算法正确性。
感谢家里人一直以来对我各方面的支持,为我在学习、做人、经济方面做出的无私奉献,在我需要帮助的时刻都能够鼓励我,负责地教我为人处世,让我学 会大度地面对过去,勇敢地面对未来。
感谢中山大学多年来为我提供良好的学习氛围和丰富的学习资源;感谢所有帮助我和关心我的同学、老师和朋友,多谢您们一直以来对我帮助和支持。
(如您需要查看本篇毕业设计全文,请您联系客服索取)