24Сʱ���Ķ�������
24Сʱ���Ķ�������
ժ Ҫ
����Ŀǰ����������ײ�����ӹ����У�������ҵ���Dz����˹����������ϣ����ַ�ʽЧ�ʵ��£��Ѿ����������г������������Ҫ���û�е�ִ����˹����������ϡ���е��������������ŵ㣺������˹��ɱ����������Ч�ʺͲ�Ʒ������������ҵ��ȫ�ȡ���ץȡ�Ĺ�����ײ������֧�ܺ�Բ����������ɣ���Ҫʵ�ֶԷ�ײ����������ץȡ����������һЩ���ѡ�Ϊ�˿˷����ѵ㣬�����з���һ�ֻ����ƽ�����ʽ�ĵ�����̣���������������̶Գư�װ�ڿɵ�ʽ�����ӱ�����ɿɵ�ʽ��˫������̻�е��צ�����⣬���Ļ������һ�����ؽڻ�е�ֱ��壬��˫������̻�е��צ��װ�����ؽڻ�е�ֱ����ϣ����˫������������ϻ�е�֡����ĵ���Ҫ�о��������£�
������1�������ƽ�����ʽ������̽ṹ��Ƽ��������������֤��˫������̻�е�����צ����ơ��ò������� Caxa �����������ʽ������̶�ά�ṹͼ�������ն�ά�ṹͼ�ijߴ�ͽṹ���� Solidworks �����������ʽ������̵���άģ�ͣ���������������̶Գư�װ�ڿɵ�ʽ�����ӱ��ϣ���ɿɵ�ʽ˫������̵Ļ�е��צ�������ʽ��������������Ϲ���������ĵ������С�������۷������� Maxwell �����н��е�ŷ��������
������2�����ؽ������ϻ�е�ֱ���ṹ��ơ��ò��������һ�����ؽڻ�е�ֱ��壬��ȷ����ÿ���ؽڵ���İ�װλ���Լ�ÿ���ؽ�֮�䴫��Ť�صķ�����
������3����е�ֱ�����˶�ѧ������������е����������ϵ���ý��������� D-H���������˶�ѧ��⣻���� Matlab �����б�д�����ļ������� GUI �˻��������棬��֤�˶�ѧ���̼���̵���ȷ���Լ���е�ֽṹ�ĺ����ԡ�
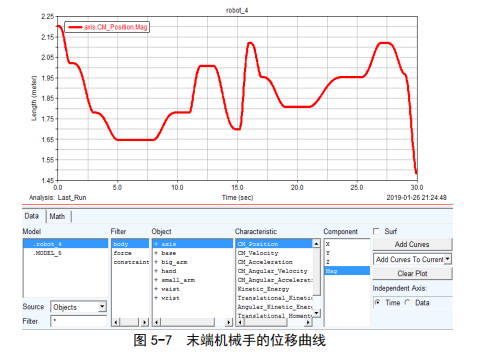
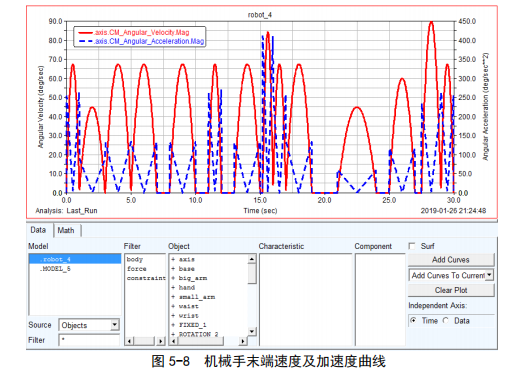
������4����е�ֱ���Ķ���ѧ���������������շ�������е�ֶ���ѧ���̣�����ADAMS �������ж���ѧ���������ͨ���۲�������ߣ��ó���е���������Ϲ����е�ĩ��λ�Ƽ������ؽڵĽ��ٶȺͽǼ��ٶ����ߺ�Ť�����ߡ������������߱仯�����ַ������û�п�������������Ԥ��Ҫ��
�����ؼ��ʣ����ʽ������̣������ϻ�е�ֱ��壻�˶�ѧ������ѧ

Abstract
����At present, in the process of automobile anticollision beam welding, most enterprises still use manual loading and unloading, the way is a low efficiency. And this way could not meet the market demand, so a manipulator is needed to replace manual worker. he manipulator has many advantages, such as reducing labor cost, improving production efficiency and product quality, and ensuring operation safety. The grab workpiece anticollision beam is composed of a bracket and a round pipe. It is difficult to grab the material of the anticollision beam. In order to overcome this difficulty, it is designed that a kind of curved surface and flat surface combined electromagnetic chuck, and two electromagnetic suckers are symmetrically installed on the adjustable connecting arm to form an adjustable double electromagnetic chuck mechanical claw. In addition, it is designed that a six-joint manipulator body, the double electromagnetic chuck manipulator claw installed on the six-joint manipulator body, the composition of double electromagnetic chuck loading and unloading manipulator. The main research work of this paper is as follows:
������1��Structural design and magnetic simulation analysis of the curved and flat combined electromagnetic chuck and design of the mechanical electromagnetic gripper of the double electromagnetic chuck. In this part, Caxa software is used to establish the two-dimensional structure of the combined electromagnetic chuck. Then according to the size and structure of the two-dimensional structure diagram, the Solidworks software is used to establish the three-dimensional model of the combined electromagnetic sucker, and the two electromagnetic suckers are mounted symmetrically on the adjustable connecting arm to form the adjustable double electromagnetic sucker's mechanical gripper. The electromagnetic force required by the combined electromagnetic chuck in the loading and unloading process was analyzed theoretically and the electromagnetic simulation analysis was carried out in Maxwell software.
������2��Body structure design of six-joint loading and unloading manipulator. In this part, a six-joint manipulator body is designed, then, the installation position of each joint motor and the scheme of transferring torque between each joint are determined.
������3��Kinematic analysis of the manipulator body. The coordinate system of manipulator connecting rod is established, and the kinematics is solved with analytical method and column D-H parameters. And in Matlab software programming files, the establishment of a GUI human-computer interaction interface, verify the correctness of the kinematics equation and programming as well as the structure of the manipulator is reasonable.
������4��Dynamic analysis of the manipulator body. The dynamics equation of manipulator is established by Lagrange method. The dynamic simulation analysis is carried out by ADAMS software. By observing the post-processing curve, the end displacement and angular velocity and acceleration curves and torque curves of each joint of the manipulator in the loading and unloading process are obtained. After analyzing the change of post-processing curve, it is found that the simulation process has no stuck phenomenon and can meet the predetermined requirements.
����Key words : combined electromagnetic chuck , loading and unloading manipulator body ,kinematics ,dynamics
����Ŀ ¼
������һ�� �� ��
����1.1 ����
�������������ѧ�����Ŀ��ٷ�չ�� ������е�ּ���Խ��Խ���죬���һ�е�ֵ�Ӧ������ҲԽ��Խ�㷺���Ի�е���� 20 ���� 60 ���������������е�ּ������Ͽ��ٷ�չ���ս����졣��ĿǰΪֹ����ҵ��е�ּ����漰����㷺�����а�������е��������������������ơ��˹����ܵȶ��ѧ�ƺ�����[1-2].�������ڸ��и�ҵ���ٷ�չ������ͬ����Ļ�е�ֱ�����������������е�֡������λ�е�֡��ȸ�����;�����ϵ����ֻ�е�֣����������ϻ�е����Ϊ��ҵ��е�ֵ�һ�����ͣ��Էɿ���ٶ��ռ���
����1.2 ѡ�ⱳ��
������ 20 ���� 20 �����������·����������� Robot һ�ʣ��䱾�����û����Ĺ���ʵ�ֵ�����������������Ŀ��ٷ�չ���������IJ�����ߣ��������ķ�չ��Ҫ��������أ�ʹ�û�е���Ե����������ٷ�չ���㷺Ӧ���ڻ�е�ӹ����������졢���ӡ����µ�����[3].
����һ�㹤ҵ��е�ֵĽṹ��ɲ���Ϊ������������Ԫ������װ�ú���Χ�豸��
����Ŀǰ�������ϻ�е����Ϊ��ҵ��е�ֵ�һ�����ͣ��Ѿ���չ��Ϊ�߱����Ե��Զ��������豸�������ܵõ��ܴ���ߣ���۸�ͳɱ�Ҳ���Ͻ��͡�����������ϻ�е�������ػ��������һ���γ�һ���Զ��ӹ�ϵͳ���ܹ�ʵ�ֹ������Զ����ϡ����ϡ�װ�С��ӹ������й������̣�����Ľ������˹��ɱ��������Ч�ʡ�
����1.3 ��ҵ��е�ֹ����ⷢչ״��
����1.3.1 ��ҵ��е�ֹ��ⷢչ״��
�������ҵ��е�ֿ��Դ������ͼ�����������������£�
�����ڹ�ҵ��е���������棬���ʻ�е�����ϻᣨIFR���ı�����ʾ���� 2009��������ȫ��ҵ��е������������������2017 ��������� 2016 ������������� 18%,ԼΪ 34.6 ��̨���� 2016 ��Ĺ�ҵ��е�ֵ����������Ͽ����й���ҵ��е��������Լ 8.7 ��̨���ﵽ����������ڶ������������ࡣ�� 2016 �꣬�������������ձ����¹������й���ҵ��е�ֵ�����ռ��ȫ��ҵ��е�ֵ������� 74%.
������ 20 ���� 70 ������¹���ʼ���Ի�е�ֵ��о��ص���ڹ�ҵ���棬���з��Ļ�е��Ӧ���ڴ���������İ����Լ������Ϲ��̷��档�ձ��Ĺ�ҵ��е�ִ����Ӧ���������������棬��ʹ���ձ�������ҵ���Զ������ִ����̶ȴ������ˡ��� 20 ���� 60 �������ǰ������ʼͶ��������ҵ��е�֣�ֱ�� 80 ��������Ѿ�����Ͷ��ʹ�ù�ҵ��е�֣�������е��Ӧ���ڻ����Ƚ϶��ӵ�����¡�
������ĿǰΪֹ���ڹ�ҵ��е�ּ���������Ը���Ϊ���������ŵ㣺��һ�������ܷ��������Ϊ���ٶȸ�Ϊ���ٺ��ȶ������ȸ��ߣ��ɿ��Ը��ߣ������Լ�㡣
�����ڶ�������ϵͳ���ӿ��ţ�����ʵ�ּ��ɻ������������绯����������е�ֽṹ�ı�ͳһ������ģ�����ϻ�������װ����չ������������������������ϵͳ��һ�廯��Ƶȣ������� RV ��������г��������ʹ����ΪƵ������֮����ҵ��е���ڻ�����ƺͿ���ϵͳ�Լ�����ģ�鲿���������ٶ��ȶ��Լ����ȵȷ��涼ʮ�ֳ��졣
����1.3.2 ��ҵ��е�ֹ��ڷ�չ״��
������ 20 ���� 70 �����ʼ���ҹ���"����"��"����"��863 �ƻ��ȹ������ߵ�֧���£�һЩ����Ժ��������Ӧ���ڰ��ˡ����ӡ���Ϳ��װ�������Ļ�е�ֲ�ȡ����һ���ijɹ�[4-5].���磬�й�����Ƽ����Ź�˾�ھ��о�Ժ��ʮ���о����з��Ļ�е��Ӧ���ڲ��ϴ���������װ�ϵȹ�ҵ���������������ɻ�е���Զ����ɷ�����˾����з����Ƴ��� rh6 ������е�֡�rd120 �㺸��е�ֵȡ��������ڻ�е������ⷢ����һ�е���������һ���IJ��[6].��Ϊ�ڹ���������е�ֵ�һЩ��Ҫ�㲿��������Ҫ�ӹ�����ڣ����ڻ�û����ȫ�Ķ���������������������ˣ����ڻ�е������ڹ����е���ڼ��������ܷ������һЩȱ�ݡ������ձ��������Ļ�е����ȣ����ڻ�е��ȱ����������һЩ�㲿����ģ�����ǵ��㲿����
������Ȼ���ڹ����غ���ҵ��������Բ�Ʒ������Ҫ��ϸߣ�ʹ��Խ��Խ�����ҵʹ�û�е�������湤�ˣ����Ƕ�����½һЩ��������С��ҵ����δʹ�û�е�֣������żӹ����Ⱥ�Ч�ʲ�����ߵ�Ҫ���£���ҵ�Ѿ�����Ӧ���Զ������ϻ�е�����ӹ���Ʒ��
����1.4 ��е�ַ���ϵͳ�������о���״
�������治�����ǻ�������ԭ�����������ۡ���Ϣ��������������֪ʶ�������Լ����������ר�������豸Ϊ����̽�������һ�ֹ���[7].���汾����ʹ���������ۺͼ�������һ��ȫ�������ϵͳģ�Ͷ�ʵ��ϵͳģ�ͽ����о����ۺ��Է�����ʹ�ü����������������ϵͳģ�ͽ����о����Ա���Ѱ����ɣ��ﵽ��ʶ����ʵ�������Ŀ�ġ�
����1.4.1 ��е�ַ���ϵͳ�����о���״
������ 20 ���� 70 �������е�ַ����о������ոտ�ʼ�����ż����ķ�չ�����ַ���������̳��֣����ٽ��˷�����ҵ�ķ�չ�뷱�١�Ŀǰ���г��������ද��ѧ�������漼���������������� Michigan ��ѧ���Ƶ� ADAMS ����ʹ�ñȽ��ձ顣ADAMS ���������Ʋ����������Ĵ��������ͷḻ��ģ�黯������������ݵĿɲ������Լ������Ľӿڣ�����Ժ� MATLAB ���ӣ���ADAMS ������ MATLAB �������Ϸ���ʱ�����Եõ����ձ�Ľ�ģ�����������е���о��е����⣬���Ҳ��������ʵ����[8-9].
����1.4.2 ��е�ַ���ϵͳ�����о���״
�������ڵķ��漼���о�������ʼ�ıȽ�������Լ�� 20 ���� 80 ������ڡ��廪��ѧ���㽭��ѧ���Ϻ���ͨ��ѧ�Ȳ����ȿ�ʼ�о���е�ַ��漼�������Դ�ȡ����һϵ�е��о��ɹ����������У���������ڵ����Ե��͵������ɶȹ�ҵ��е��Ϊģ�ͣ���ͨ�ó�������˼��������˹�ҵ��е�ֶ���ѧ������ר�ó���[10].��ʮ�����������ڿƼ��IJ��Ͻ��������ۺ�ʵ���IJ�����ǿ����е�ַ��漼��Ҳȡ���˺ܴ�ķ�չ��ȡ����һЩ�ɹ����磺����������ѧ�о��Ļ�е�����߱��ϵͳ HOLPS���Ϻ���ͨ��ѧ�� ROSIDY ͨ�û�е��ͼ�η�������������������ѧ������ͨ�û�е��ͼ�η���ϵͳ GRGSS �������Ƽ���ѧ�����Ĺ�ҵ��е���˶�����ϵͳ IRKss ��[11-13].
����Ŀǰ����е�ַ��漼���о����������ڻ�е�ֱ۵��˶�ѧ����������ѧ�������֡���е�ֻ����Ƕ�����ɶȵĿռ����˻�����ʵ���о����˶�ѧ�Ͷ���ѧ��ʮ�ָ����Ҽ������ܴ������Ϊ�ˣ�����е����Ϊ����������÷��漼���Ի�е�ֵĻ�����ơ��˶�ѧ��������������������ģ�⣬���ԺܺõĽ���з���е�ֹ����г��ֵ�һЩ���⡣
����1.5 �����о�
�����������ķ�Ϊ�����֣��ڽ����˻�е�ֵı����������ⷢչ״���ͷ��漼�����о���״֮����ʯ��ׯij��������������еĹ�״��ײ��Ϊ�����������ƽ��ͻ������ʽ������̼����ؽڻ�е�ֱ���Ļ�е�ṹ��������װ����һ��ʵ�ֶԷ�ײ���������ϣ����������ϻ�е�ֱ�������˶�ѧ���Ͷ���ѧ��������������������ȫ���ܽἰ��л��
������һ������צ�з��������ϻ�е�ֱ���Ľṹ��ơ����ȣ����˽��ײ���Ľṹ��ʵ�ʳߴ�Ļ����ϣ���ƻ��桢ƽ�����ʽ˫���̿ɵ���Ż�е��צ���� Caxa ����������Ż�е��צ�ṹͼ���� Solidworks ������������άģ�ͣ�������צ����ĵ�����������۷��������뵽 Maxwell �����У����е�š��������棬�����ų��ķֲ��������֤������̽ṹ����ȷ�Լ�ȷ����צ����ʱ������Ĵ�С����Σ�������������ռ��ʵ�ʳߴ磬���˽�������еķ�ײ�����ӹ����е�ʵ��״����������ؽڻ�е�ֱ���Ļ�е�ṹ��ȷ����ÿ���ؽڵĵ������λ�ü�����������Ĵ���������
�����ڶ����֣������ϻ�е�ֵ��˶�ѧ���۷������ؼ���λ��֤���ڽ��ܻ�е���˶�ѧ�����ļ��ַ���֮��ѡ�ý����������˶�ѧ������������е������ϵ���г� D-H ������������ó������ؽھ��������˶�ѧ���������˶�ѧ�������������˶�ѧ��ʽ��д�� M �ļ����� Matlab �������� GUI �˻��������档
����ͨ������ѡ��һ��ǣ��������˶�ѧ��֤���ѻ�е�������Ϲ����е�ȡ�ϵ�����ϵ㵼�뵽�˻����������У���֤��е�ֽṹ�Ƿ���Ե���Լ��Ƿ�������ֵ���Ӷ�����ȷ����е�ֽṹ�ĺ����ԡ�
�����������֣������ϻ�е�ֶ���ѧ��ʽ�Ƶ��������Է���������ڸ����о���е�ֶ���ѧ�����ķ���֮��ѡ���������շ��̣�������е�ֵĶ���ѧ��ʽ���Ƶ�����е�ָ��ؽڵ�Ť�ر���ʽ��ʹ�� Adams �����������ϻ�е�ֱ��壬���ж���ѧ���棬�ó���е��ĩ��λ�����������ؽڵĽ��ٶȡ��Ǽ��ٶȺ�Ť�����ߣ��������������ߣ����������ϻ�е���������Ϲ������Ƿ��п������Ӷ���֤��е�ṹ����ȷ�ԡ�
�����ڶ��� ˫������̻�е��צ�ṹ�����������
����2.1 ����
����2.2 �������
����2.3 ��צ��е�ṹ���
����2.4 ������̽ṹ���
����2.5 ������̵���ѧ���Է���
����2.6 ������̵�ŷ���
����2.6.1 Maxwell �������
����2.6.2 ��ŷ������ۻ���
����2.6.3 �������������
����2.7 ������
���������� �����ϻ�е�ֱ��巽�����
����3.1 ����
����3.2 ϵͳ���岼�ּ���������
����3.3 ��е�ֱ���ṹ��Ƹ���
����3.3.1 ��е�ֱ���Ľṹ��ʽ��ѡ��
����3.3.2 ȷ�������ϻ�е�ֵĻ�������
����3.4 ��е�ֱ���ṹ���
����3.4.1 �����ṹ���
����3.4.2 ������������
����3.5 ����ѡ�ͼ��ṹ���
����3.5.1 ����ṹ����
����3.5.2 �����е�ṹ���
����3.5.3 ��������
����3.6 ������
���������� �˶�ѧ�������ؼ���λ��֤
����4.1 ����
����4.2 ���˲���������ϵ����
����4.3 �˶�ѧ����
����4.3.1 �˶�ѧ����
����4.3.2 �˶�ѧ���
����4.4 ʵ����֤
����4.4.1 Matlab �������
����4.4.2 ���� GUI �˻���������
����4.4.3 �˶�ѧ��֤
����4.4.4 ��е�ṹ��֤
����4.5 ������
���������� ����ѧ��ʽ�Ƶ��������Է���
����5.1 ����
����5.2 ����ѧ�����������
����5.3 ����ѧ����
����5.3.1 ���ܼ���
����5.3.2 ���ܼ���
����5.3.3 Lagrange ����ѧ����
����5.4 ����ѧ����
����5.4.1 ��������
����5.4.2 �������˼·
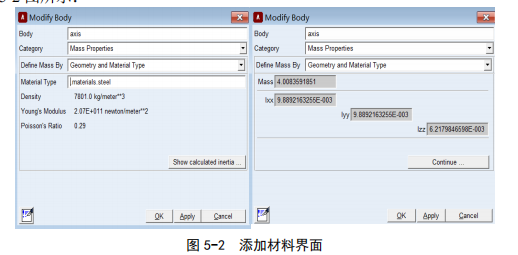
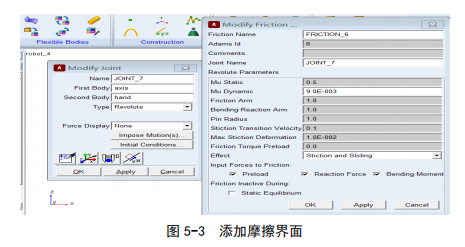
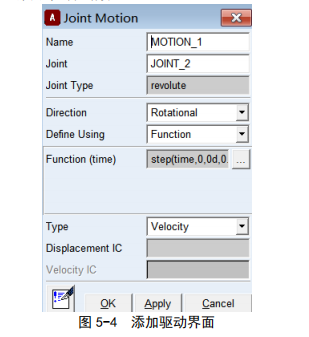
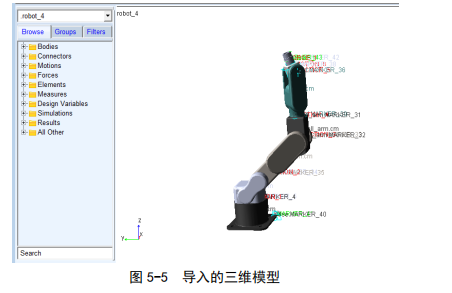
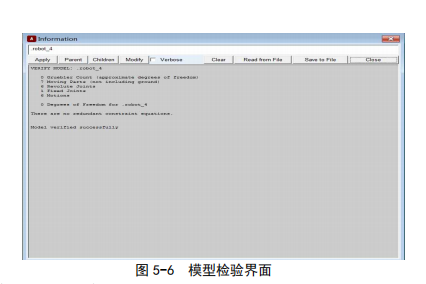
����5.4.3 Adams ����ѧ����
����5.5 ������
������ �ܽ���չ��
����Ϊ�����ҵ�ĺ��ӷ�ײ����Ч�ʣ����ڶ���ҵ��ʵ������ĵ��飬�˽����װ��̨�ռ䲼�ּ�ʵ��λ�ã������еİ�������е�ֱ���Ļ�������Ʋ����������ϻ�е�ֱ��壻���ڷ�ײ���Ľṹ��״��ʵ�ʳߴ磬�з���һ�ֻ����ƽ�����ʽ������̣�����װ������һ�ֿɵ�ʽ��˫������̻�е��צ���������ϻ�е�ֵ���άģ�ͻ����Ͻ������˶�ѧ�����������֤������ѧ���۹�ʽ�Ƶ��Ͷ���ѧ��������������ĵ���Ҫ�������ݺͽ������£�
������1��ͨ���Ķ��������йػ�е�ֵ����ף������һ�����ؽڻ�е�ֱ�����з���һ�ֻ����ƽ�����ʽ������̣�����Ƴ�˫������̻�е��צ�������ʽ�ĵ�����̵��뵽 Maxwell �����н��е��ǿ�ȷ����������Ÿ�Ӧǿ�ȼ��ֲ��������֤�˵�����̽ṹ����ȷ�ԡ�
������2���ԸĽ��������ϻ�е�ֵ���άģ��Ϊԭ�ͣ�ʹ�� D-H ���г����˲������������˶�ѧ�����˶�ѧ�������������˶�ѧ��ʽ��д�� M �ļ����� Matlab �����н��� GUI �˻��������棻ͨ��ѡ��һ��Ƕ�ֵ����֤���˶�ѧ���⡢��⼰��̳������ȷ�ԣ�ͨ�������е�ֵ������ϵ㣬��֤��е�ֽṹ�ĺ������Լ���е�ֵĿɴ��ԡ�
������3���ԸĽ��������ϻ�е�ֵ���άģ��Ϊԭ�ͣ��ȼ�������ܺ����ܣ����뵽�������շ����У��Ƶ������˵ļ���е�ֵĶ���ѧ��ʽ��ʹ�� ADAMS �������������ϻ�е�ֱ�����ж���ѧ����������о���е��ĩ�˵�λ�ơ��ٶȡ����ٶȼ����ؽڵĹؽ�Ť�صı仯��ϵ��
�����������л���һЩ����֮���������������������һ���о���
������1���ڻ�е�ṹ��Ʒ��棬��е�ֵij��֡�����ͺŵ�ѡ���Լ����У�˻�û������������Ҫ����������ơ�
������2����е�ֶ���ѧ����������Ļ�������ϸ����ʵ�ʽ�������ò�����ϸ������Զ���ѧ����ʵ�顣
������3�����ڻ�е�ֹ켣�滮���Ż����֣���ʱ��ԭ��δ���ü��о���ֻ�Ǽ���֤�˻�е�����˵Ľṹ�Ͳ������Դﵽ�����ϵ�Ҫ��δ��·���Ż���
������ �� �� ��
����[1] ETRO.New Possibilities for Japan's Robot Industry[J].Japan's E-conomicMonthly,February ,2006,1:4.
����[2] �´������Ȩ���ձ������ڿ�ѧ���������ƻ�����Ҫ��[EB/OL].http://www.cao.go.jp /cstp /siryo / haihu53 /siryo1-1.pdf.
����[3] �����㣬���ײ٣�����������ҵ��е�ֵķ�չ��״�����Ƽ�Ӧ��[J].�й���ͨ�ţ�2017,3��2����121-123.
����[4] �����ۣ��������Խ�������ҵ��е�ֵļ�����չ��Ӧ��[J].��е�������Զ�����2015,2��01����1-4.
����[5] ���ܣ���Ծ�ԣ����������й���е�ֵķ�չ״��[J].����������2013,3,243-244.
����[6] ���鿵���ҹ������˷�չ����[J].�����˼�����Ӧ�ã�2009,��3����32-36.
����[7] �½��ţ����DZ�ҵ��е�ֵķ�չ����״����[J].����������2015,��18����82.
����[8] �����á������ϻ�е���˶�ѧ������ѧ���������[D].�ൺ���ൺ�Ƽ���ѧ 2012.
����[9] �����١�һ�ֻ�е�ֶ���ѧ��������Ʒ���[J].��е��ѧ�뼼����1998,17��5����763-766.
����[10] ���������ɶȻ�е���˶����ܼ�����ѧ���������[D].�ӱ���ҵ��ѧ��2007.
����[11] �˴��ơ�ͨ�õĻ�е�ַ���ϵͳ�о�[D].�����������Ƽ���ѧ��1990.
����[12] �κ��䡣һ���������Ļ�е�����߱��ϵͳ[J].����������ѧѧ����1992,20��5����39-45.
����[13] ����ΰ���˽�һ��һ�� ROSIDY ͨ�û���ҵ��е��ͼ�η�������[J].��е�֣�1993,15��2����25-29.
����[14] ���٣���֮�ݡ���ҵ��е�ֳ����ֲ����ͽṹ����[J].��е�ּ�����Ӧ�ã�2001��2����31-32.
����[15] ��졣ͨ�û�е�ַ���ϵͳ���о�[D].�Ͼ���������ѧԺ��1991.
����[16] �����ɡ���е�� CAD ���ݿ����[J].��е�֣�1990,12��4����42-45.
����[17] �º��������������̽ṹ��Ƽ�Ӧ���о�[D].�ػʵ�����ɽ��ѧ��2013.
����[18] �����������������Զ����˻�е��������о�[D].�Ϸʣ��Ϸʹ�ҵ��ѧ��2015.
����[19] �Բ����ź�����Ansoft12 �ڹ��̵�ų��е�Ӧ��[M].�������й�ˮ��ˮ������磬2010.
����[20] ���ڡ�������Ż��Զ�����ϵͳ�Ŀ��������[D].�Ϸʣ��Ϸʹ�ҵ��ѧ��2015.
����[21] �ܲ�Ӣ����ҵ���������[M].��������е��ҵ�����磬1995.
����[22] �������������˫��צ�����ϻ����˽ṹ���������о�[D].ʯ��ׯ��ʯ��ׯ������ѧ��2014.
����[23] ̷�ܡ������ɶ����ϰ��˻�е�ֵ�����[D].�人���人������ѧ��2012
����[24] �����ס���е�ּ�������[M].�人�����пƼ���ѧ�����磬1995.
����[25] �����Σ��������������˼�������[M].����������������ҵ��ѧ�����磬2006.
����[26] �����ˡ���е��ѧ[M].�������廪��ѧ�����磬2009.
����[27] �ض�������ؽ��ͻ�е�ֽṹ���[J].������ѧѧ����2013:2,654-659.
����[28] S. Hirose, Biologically Inspired Robots[J]. Oxford, U.K.: Oxford University. Press,1993.
����[29] �����ף������������ס���е��ѧ[M].��������е��ҵ�����磬1993.
����[30] ��˳ƽ�����˹������� Solidworks �� ansys �������ɶȹؽ�ʽ��е�ֽṹ��Ƽ�[J].2014:2��2��54.
����[31] ��������������h�� Solidworks2012 ���İ��е���ʵ��������Ӧ��[M].���������ӹ�ҵ�����磬2012.
����[32] �ȵ��ţ������ģ���������Solidworks2011 ���İ��������ʵ���̳�[M].��������е��ҵ�����磬2011.
����[33] ��ս�У��Ŵ���������־������ 3R б�������������������˶�ѧ����[J].����ѧѧ����2008,41��1����103.
����[34] ���٣���֮�ݡ���ҵ�����˳����ֲ����ͽṹ���� [J].�����˼�����Ӧ�ã�2001��2����31-32.
����[35] Chen Wen. Dynamic modeling of multi-link flexible robotic manipulators[J]. Computersand Structures,2001,79��2����183-195.
����[36] SlawinskiE,Mut VA,Postigo JF.Teleoperation of mobile robots with time-varying delay[J].IEEE Trans Robotics 2007,23��5����71-82.
����[37] Swever J,Chris G.Optimal robot dynamics excitation and idendification[J].IEEE TransRobot Automat,2007,13��5����730-740.
����[38] MengYan,ZhuangHanqi,Autonomous robot calibration using vision technolog[J].Robotics&Computer-integrated Manufacturing,Aug2007,23��4����436-446.
����[39] Hogan.N.Impedance Control of Industrial Robots[J].Journal of Robotic and ComputerIntegrated Manufacturing,1984,1��1����97-113.
����[40] Shimon.Y.Handbook of lndustrial Roboties NewYork:John Wiley&Sons,2005.
����[41] RAGHAVANM, ROTH B.Inverse kinematics of the general 6Rmanipulator and relatedlinkages [J]. Journal of Mechanical Design,1993,15��3����502-508.
����[42] TsaiLW,MorganA.Solvingthe kinematics of the most general six andfive-degree-of-freedom manipulators by continuation methods [J].Mechanism and MachineTheory. 1985,107��2����189-200.
����[43] MARKEROSHEIM. Robot Wrist Actuators [M].New York: Wiley Pres, 1988.
����[44] KUCUK S,BINGUL Z. The inverse kinematics solutions of fundamental robotmanipulators with offset wrist [C]//Proceedings of the International Conference onmechatronics.Taipei, Taiwan China,2005:197-202.
����[45] �����졣���ֿܲ���˻�е�ֵ�������о�[D].��ɽ������������ѧ��2017.
����[46] �����㣬����������ء�MATLAB 7.0 ʵ�ñ���[M].�������й����������磬2009.
����[47] �����ɡ�������άģ�͵Ļ������˶�����ϵͳ�о�[D].ʯ��ׯ��ʯ��ׯ������ѧ��2015.
����[48] �����飬���ӳ����ؽ���ҵ�����˹����ռ估�ṹ�ߴ������һ��ȷ������[J].��е��ѧ�뼼����1995,55��3����41-43.
����[49] Y. C.TSAI A. H. SONI. Workspace Synthesis of 3R��4R��5R and 6R Robots [J]. MechanicalMachine theory, 1985, 22 ��3�� :52-59.
����[50] P.R.BERGAMASCHI etal.Design and optimization of 3R manipulators using the work-space [J].Applied Mathematics and Computation. 2006,17��2����439-463.
����[51] ����ΰ�������������������Ļ������˶�ѧ�о�[J].��е��������죬2009��5����194-196.
����[52] �ܹ��壬л���죬��������6 ���ɶȽ���������˶�ѧ����Ż����о�[J].�����Ʒ�����봴�£�2009,22��5����21-23.
����[53] ��ΰ��л���죬�ܹ��塣 6-DOF ��ҵ��е������Ż����乤���ռ���о�[J].��е����ӣ�2011��1����57-60.
����[54] ���ᣬ�����֣�ë���Ρ���ͨ MATLAB GUI ��ƣ��ڶ��棩 [M].���������ӹ�ҵ�����磬2011.
����[55] ��Ψ�š���е���Ż����[M].�������廪��ѧ�����磬1994.
����[56] �����ᣬ�������������ɶȹ�ҵ�������˶�ѧ����������[J].���繤�̼�����2008,37��11����36-38.
����[57] ��ΰ�ա�������ѧ-�˶�ѧ������ѧ�����[M].��������ѧ�����磬2007.
����[58] ��ͥ�����������˶�ѧ������ѧ[M].�������������ӿƼ���ѧ�����磬1991.
����[59] ���Σ����������������������˶�ѧ�㷨�� ADAMS ����[J].������Һѹ��2008,36��3����23-25.
����[60] �����ա�ADAMS���������ʵ��[M].������������ҵ�����磬2006.
����[61] ��췼�������������� ADAMS �Ļ��������˶���ѧ����[J].��е������о���2005,21��6�� : 50-52.
�� л
��������ʱ��ҴҶ�����ת��֮���о�����ѧ���ļ�����ϡ����������ո�̤���о������������������졣��ʼ�ոо��Լ��dz����ˣ����������ҵĵ�ʦ��Ҳ�ܸ�л������ô�õ�ѧϰ������������������Լ������������Լ������Ļ��ᡣ�ڴ��ڼ䣬�����ɱ䡢�ջ������ࡣ�ڴˣ��ҽ������ʱ��һֱ����ҡ��������Լ���ѧϰ�������и����Ұ��������DZ�ʾ��л��
������һ����Ҫ��л�ҵĵ�ʦ��ս��һֱ�����Ĺ��ĺͽ̵�������ʦ��ѧ����ʮ���Ͻ����������־�������Ӱ�쵽���ң���ѧϰ������ʦһֱ��ϸ�ĵĽ̵����ǣ������ǵ�֪ʶ�õ���չ�������õ�������
�����ڶ�����Ҫ��л�ҵ�ͬ��ʦ�ֵܡ�������ƽ���������Լ�ÿ��ͬ�ſ����ж��������������ʮ���м�ֵ�Ľ��飬ʹ�Ҽ����������ѣ����Ŀ���˳������ɡ�
������������Ҫ��л�����Ŀ��⡢���ں�Ԥ����ڼ��λ��ʦ��������������л�ҵĸ���Ա�˷�Ծ����лһͬѧϰ�������۹���ͬѧ�ǣ���л�о������������й����ҡ������ҵ��ˣ���лʯ��ׯ������ѧ�����������������������õľ������ҵ��������������Ƕ���ø��Ӿ��ʡ�
���������Ҫ��л�ҵĸ�ĸ���ҵĽ�㣬�����ҵ������ǣ�������������һ·��֧�֣��ſ��������ڵ��ң��һ����Ŭ�������Լ��������㣬�ر��������ǣ�
�������Դ��������й����ҵ��ˡ��ڴ�ף��������˳�������尲����
��������Ҫ�鿴��ƪ��ҵ���ȫ�ģ�������ϵ�ͷ���ȡ��