24小时论文定制热线
24小时论文定制热线
摘要
近年来海参以其特有的营养价值走入市场,养殖产业逐渐扩大,但繁琐的捕获过程令,人困扰。目前的海参捕获方法多为人工捕获,效率低且潜在危险大。故本文针对海参捕获的问题研制了捕获机械手。
首先对海参的生活习性等进行了调研,对比分析了相关领域的研究现状,结合海参特点、捕获环境等,创新性的提出以阿基米德多面体为基本构型的捕获手爪,并对13种阿基米德多面体进行拆解分析,利用其自身的高度对称性将多面体划分为项面、支链和底面三部分,依据设计需求选择了3种符合条件的多面体即截角立方体、截角八面体和大斜方截半立方体。对三种多面体进行构型设计与分析,分别对输入件、支链和底面进行设计,最终确定了整个多面体捕获机械手的构型,并根据海参捕获的应用背景确定了多面体捕获手爪的构型尺寸。
分析所设计的捕获机械手构型,绘制机械简图,分别进行了运动学分析和动力学分析,并在Adams中建立虚拟样机进行仿真,可实现三种捕获机械手的展开及闭合。对三种捕获机械手的输入件和捕获底面的位移曲线、速度曲线、加速度曲线、运动轨迹等进行了对比分析,总结出三种捕获手爪的运动特点及各自适应的应用场合。并对大斜方截半立方体捕获手爪进行工程设计,包括运动副的实现方式,固定的连接的方式,电机的选择与控制等,利用3D打印制作了大斜方截半立方体手爪样机,对样机进行装配及实验,可通过开关控制捕获手爪的开合,实现对目标物的抓捕。
本论文的创新点在于手爪的设计,将阿基米德多面体作为捕获机械手的基本构型。利用其对称性划分出机械手结构,并利用串联的四杆机构实现多级传动,与手指式的机械手相比,降低了对海参的伤害,提高了捕获的成功率,为捕获类机器人的设计提供了新思路。该多面体捕获机械手的研究有望提高我国海参捕获的智能化水平,推动我国海洋渔业智能化的发展,同时该技术也可以继繢在海洋捕捞、渔业捕获等领域进行扩展研究,具有广阔的应用前景。
关键词:阿基米德多面体,海参捕获,机械手,四杆机构
ABSTRACT
In recent years, sea cucumber has entered the market with is unique nutritionalvalue, and the breeding industry has gradually expanded, but the cumbersome captureprocess is troublesome. At present, most methods of sca cucumber capture are artificialeapture, which is low in fficiency and potentially dangerous. Therefore, this paperdevelops a capture robot for the problem of sea cucumber capture.
Firstly, the living habits of sca cucumbers are investigated, and the research statusof relaed fields is compared and analyzed. Combining the characteristics of seacucumbers and the environment of capture, innvatively proposes the capture elawswith Archimedes polyhedron as the basic configuration, and 13 The Archimedespolyhedron is disassembled and analyzed, and its polybedron is pided into three parts:top surlace, branch chain and bottom suface. According to the design requirements,three kinds of qualified polyhedrons, namely a truncated cube, a truncated octahedronand a large oblique truncated half cube are sected. The design and analysis of the threepolythedrons are crried out, and the input member, the branch and the bottom surfaceare designed respectively. The configuration of the entire polyhedral capturemanipulator is finally determined, and the configuration of the polyhedron capture elawis determined according to the application background of the sea cucumber capture.size.
Analyze the designed capture robot configuration, draw a mechanical sketch,perfom kinematic analysis and dynamic analysis respectively, and build a vitualprototype in Adams for simulation, which can realize the expansion and closure of threekinds of capture robots. The displcement curves, velocity curves, aceleraion curvesand motion taicctories of the input components of the three capture robots and thecapture bottom surface are compared and analyzed. The motion characteristics of thethree eapture claws and the adaplive applieations are summarized. The engineeringdesign of the large oblique halfl cube capture claws, including the implementation of themotion pair, the fixed connection method, the slectin and control of the motor, is usedto create a large oblique half-cutbe gipper prototype using 3D printing. The assemblyand experiment of the prototype can be crtolldl by the switch to ceapture the openingand closing of the claws to achieve the capture of the tanget.
The innovation of this thesis lies in the design of the claws. The Archimedespolyhedron is used a8 the basic configuration of the capture manipulator. The symmetry is used to pide the manipulator structure, and the multi-stage transmission is realizedby the four-bar mechanism in series, with the finger type. Compared with the robot, thedamage to the sca cucumber is reduced, the success rate of the capture is improved, anda new idea for the design of the capture robot is provided. The research on thepolyhedral capture manipulator is expected to improve the inelligence level of seacucumber eapture in China and promote the development of marine fishery itelligencein China. At the same time, the technology can continue to expand research in the fieldsof marine fishing and fishery capture, and has broad application prospects.
KEYWORDS: Archimedes polyhedron; sea cucumber eapturing; manipulator; four-barmechanism
目录
1绪论
1.1 引言
自我国实施"海洋兴渔"政策以来,我国的海水养殖业和海产品加工业的市场蓬勃发展,走入人们生活的海产品越来越多样化,除了之前较常见的牡蛎、蛤仔类,海胆、海参、鲍鱼等产品也逐渐走上饭桌。近年来,海参的营养价值逐渐被研究发现,市场对该产品的需求也逐渐增加,海参类养殖产业逐渐扩大,行业前景广阔。
随着海参养殖行业飞速发展,随之而来的问题便是海参的捕获。海参的养殖方式决定了捕捞方式,目前的捕捞方式大多是人工下海捕捞,这种方式捕捞效率低,耗费周期长,潜在危险巨大,且受季节、压力差、供氧方式等因素的影响,会对捕捞人员造成一定的身体危害,所以用于海参捕获的机器人亟待开发,避免人员伤害和高效率地捕获海参。
1.2研究背景
海参,是生活在海边至8000米的海洋棘皮动物,距今已有六亿多年的历史,以海底藻类和浮游生物为食。海参同人参、燕窝、鱼翅齐名。是世界八大珍品之一。海参不仅是珍贵的食品,也是名贵的药材。海参的种类很多,全世界海参约110多种,现存约900种,从浅海到8000多米的深海都有,其中有40种左右可以食用叫。其多栖息于水深13-15m 的海藻繁茂、风浪冲击小、水流缓慢、透明度较大、无大量淡水注入的海区。生活在自低潮线以下2-20m,幼小者生活在浅水底,个体较大者生活在深水底,夏季有休眠习性,且当水温下降到20"C以下时即解除夏眠。海参具有很强的再生习性,当处在不良生活条件下,体壁强烈收缩,从肛门排出内脏,如消化管、中短波吸树、生殖腺等,条件转好时,再生新内脏。切去身体的一段仍可再生。以小型动植物为食,如腹足类、桡足类、软体动物的幼贝和硅藻及有机质碎屑等。
从20世纪80年代中期开始,我国逐步实施"以养兴渔"的战略,海洋养殖业正稳步快速的发展,养殖范围逐步扩大,养殖品种也不断增加。传统的养殖晶种有牡蛎、缢蛏蚶类和蛤仔,现已发展到海水鱼、海参、鲍鱼、海蟹等40多个品种。但海水养殖存在资金、技术。自然资源等问题,其中自然资源是限制海水养殖的发展的最大问题,同时由于资金。技术等原因的限制,使得目前海水养殖的主要区域港湾、找海。滩涂等,10米深线以内的浅海利用率低于10%,10米30米深线以内的浅海利用率更低。近几年,海参以其特有的营养价值和药用价值,吸引了更多的消费者,目前的年产值已超200亿元。市场对海参的需求量不断增加,野生海参的供应量已经不能病足市场需求,因此海参养殖应运而生。
海参养殖对环境要求极为苛刻,在不同时期的生长、发育过程中所需的需要不同的营养物质及饵料。育苗阶段海参的饵料为鲜活海洋红酵母、浓缩光合细菌和单胞藻等。保苗阶段为稚参饵料、马尾藻粉等。养殖阶段为成参饲料。海参的养殖环境的水质条件有相关的养殖水环境标准。相关的各项指标必须控制在国标以内。随着科技的发展,尤其是传感技术的发展,水产养殖已经由原来的粗养转变为精养,甚至工业化高密度的方式。为保证更稳定的养殖环境,养殖监测系统也在一步步完善,利用相应传感器可监测水质中pH值、盐度、溶解氧、温度等参数,并将采集数据传送到客户端,对养殖进行动态监测。海参的养殖方式繁多,主要有虾池养殖、海上筏式养殖、人工控温工厂化养殖等方式。本文所研究的养殖方式,是滩涂养殖,即面积有限,深度有限,人工干预有限的特殊环境,滩涂养殖方式水深大约为10-20 米。
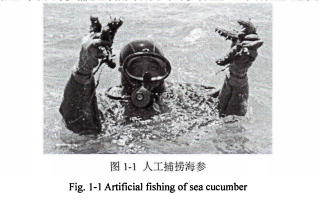
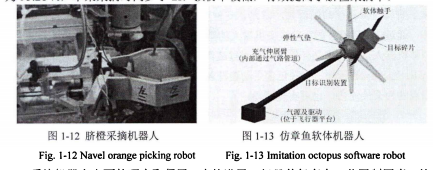
海参在- -年的养殖周期内有春季和秋季两个捕捞季节。目前的海参捕捞主要都是入工进行的,如图1-12所示,由两个"海猛子"配合,两人全副武装,靠氧气管相连,一人下水捕捞海参,一人负责观察下海者状态,如果出现紧急情况便将其拉上岸,这种捕获方式明显存在很大的风险。海参的两个捕获季节气温比较低,且下水捕获的设备繁重,对捕获人员的身体素质要求很高。而且水下环境复杂,海参的生活周園可能存在礁石,水下压强很大,对捕获人员会造成- -定的身体伤害。因此,关于海参捕获的相关研究对海参养殖产业具有重大意义。
1.3国内外研究现状
本论文针对海参捕获设计多面体机械手,对相关领域的研究现状进行调研。
首先对仿生灵巧手的研究现状学习,了解了灵巧手的利弊,接着对采摘抓捕机器人进行调研,了解了目前的研究情况,最后对多面体机器人总结学习。
1.3.1仿生
灵巧手机器人的末端执行器通常决定了机器人的功能,目前的末端执行器种类繁多,如机器人工具快换装置、喷枪、碰撞传感器、焊枪等,为使机器人末端实现精准抓捕,仿生机械手逐渐发展起来。
仿生机械手是模仿生物的形态、结构、运动特点等制造出的机械手,在设计制作过程中涉及医学、生物学、机械工程、计算机控制等多个领域。国外仿生机械手最早发明于1963 年,为帮助受害儿童。英国的"i-LIMB"是最先走进世界市场的仿生机器人,这款机器人的五个手指均可自由活动,并获得了英国最高工程奖。自20世纪80年代开始,仿生灵巧手进入飞速发展的阶段。1980 年,美国麻省理工学院和犹他大学联合研制的Utah/MIT手,如图1-2所示,瑞士在2013年推出全新具有触感的仿生手,计划用作人体移植。之后英国成立了第一家"仿生手"工厂,旨为客户定制假肢。仿生机器人最初只能进行简单拆装,逐步发展的越来越智能化,具体手指的关节控制,末端的触觉传感器等使该领域快速发展。
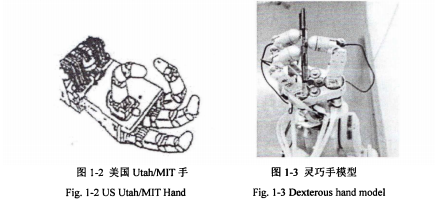
关于仿生灵巧手的研究国内也积极推进,王华对水下灵巧手做运动学分析并进行实验,设计了一种三指的水下仿生灵巧手,结构模型如图1-3所示,指头采用模块化设计,每个手指含三个转动关节,在软件中建立运动学模型,求解运动方程及运动逆解,在手指上安装传感器对手指运动进行实验,对实验结果进行分析,验证了运动模型的正确性,目 前该模型已经投入使用,该研究为水下仿生手领域奠定基础。
靳果等凹人也对水下灵巧手进行了运动学分析及仿真,以英国Shadow 公司的Shadow仿人灵巧手为模型,如图1-4所示,以中指为例,建立运动学模型,求解正、逆运动学方程,相关参数,并在Matlab中对求解结果进行了验证仿真,理论求解与仿真结果一致,且中指有唯一的正运动学解。 相较于之前的灵巧手运动学分析,对计算结果进行仿真分析,提高了运动学分析的准确性。左骏秋,张磊等问人也进行了三指仿人服务型灵巧手的设计,提出了一种较简易的机械手,三个手指的自由度均为3,手指的转动控制仍采用机械方式,关节处用交错的钢丝传动,超声波电机驱动,对关键部位进行强度校核,此仿生灵巧手采用的钢丝转动方式,降低了电机负担,同时增大了手爪的可利用空间,结构紧凑,但在抓取物体时机械手的三指同时运动,不能实现单独运动,故对所抓取物体的表面组成或粗糙度有一定的要求,应用范围有限。
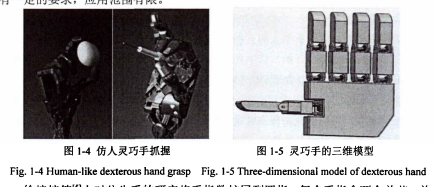
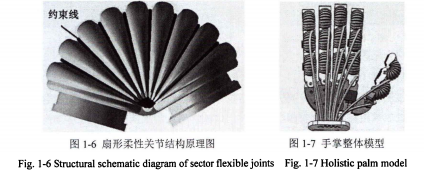
徐培培等[5]人对仿生手的研究将手指数扩展到四指,每个手指含两个关节,关节处采用四杆机构,每个手指采用有独立旋转轴,可实现各手指的独立运动。电机采用空间柔索传动,对仿生手的整体结构建模,并利用Adams对模型进行仿真,得到相应的运动参数,发现灵巧手运行稳定,未出现突变现象,运动速度及轨迹满足设计需求。这种灵巧手已经可实现各手指的独立运动,并且采用了柔索方式进行电机传动,减轻了仿生手自身的重量,但四杆驱动的关节运动具有固定轨迹,即不能通过所抓取的物体调整相应参数,适应性一般。马翔字等6)进行了仿生灵巧手的手指设计,将手指数增加为五指,其中大拇指机构单独设计,其他四指采用模块化设计,三维设计图如图1-5所示,对四指关节模型做运动学分析,在UG中仿真灵巧手,可实现握持功能和单指敲打功能,该仿生灵巧手可提高手部残疾患者的生活质量,同时也为康复型机器人设计提供了新思路。手指关节处的驱动除了微型电机驱动外,还有气压驱动的方式,宋钊杰门研究了气动扇形柔性关节多指仿人灵巧手,其中关节处采用扇形柔性驱动,柔性关节原理图及手掌整体结构如图1-6. 1-7所示,通过气压控制关节转动,每个关节供压相互独立,可实现独立运动,对灵巧手做运动学分析、仿真并对样机进行实验,可抓取不同尺寸的日常用品,该研究提出了新的灵巧手驱动方式,提高了手瓜柔性。
李磊周介绍了仿生软体吸附机器人,生物吸附原理分为三类:干吸附、湿吸附、负压吸附和胶合,介绍了相应吸附方式的生物,壁虎、树蛙、章鱼和鲫鱼以及基于不同吸附方式的仿生吸附机器人。由生物特性研发的机器人逐步发展的越来越多样化,应用领域也逐步扩大,但生物吸附机理复杂,机器人末端感应及制造精度都达不到需求,仿生吸附机器人还有更长的路要走。
国内仿生灵巧手的研究从三指到四指再发展到五指,各手指从同步运动发展到独立控制,灵巧手可实现的功能越来越多样化,应用领域也逐步扩大,但目前灵巧手手指末端的控制精度较差,如建立仿生灵巧手的类似模型用于海参捕获,虽然可以利用灵巧手的抓握功能实现抓捕,但低精度控制的手爪可能会对海参造成一定伤害。
1.3.2采摘抓捕机器人
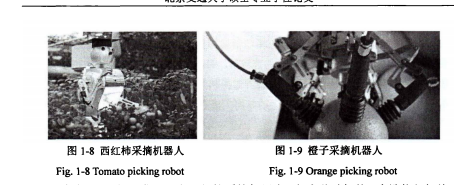
大面积的果蔬养殖或是水产养殖,在收获季节总是又悲又喜。国内大部分果蔬都是人工采摘,这种方式费时费力,成本高,效率低,所以采摘抓捕类的机器人亟待研发,目前市场上已经存在该类应用的机器人,如图1-8、 1-9 所示,可分别实现对西红柿和橘子采摘。
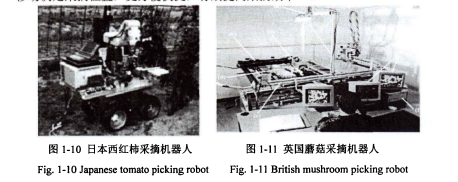
日本在1993年研发出一台西红柿采摘机器人,包含移动机构、末端执行机构、视觉检测机构等,通过检测机构判断西红柿的成熟程度,利用吸盘吸住成熟果实,再通过末端机械手配合将西红柿拧下,这款机器人的采摘成功率约为70%.近滕等人研制了一种草莓采摘机器人,为避免与草莓表面的接触,通过真空压力差吸住草莓,这种方式可以提高草莓采摘的成功率,但目标草莓附近未成熟的草莓也会随之被吸入,所以对于真空压力的控制还需研究。英园Silsoe 研究院研制出蘑菇采摘机器人,可以对蘑菇的位置、大小进行检测,其末端执行器是-种吸引器,可以对蘑菇进行采摘和修剪,成功率约为75%191.西班牙自动化研究所研制出- -种柑橘采摘机器人,机械手固定在拖拉机上,可通过彩色视觉系统判断柑橘是否符合采摘标准,还可以根据成色、大小分箱,这款机器人是人机结合式,拖拉机的移动决定采摘位置,更方便快捷,有效提高采摘效率10.
国内对采摘机器人的研究也稳定发展。董其维"对采摘机器人机械手的夹紧装置进行了优化设计,对采摘机械手建立动力学模型,在Adams中进行仿真分析,求解出在不破坏果实的前提下的可产生的最大夹紧力,此项研究对后续采摘机器人手爪的夹紧力设计提供了参考,对手爪优化有重要意义。李建伟、陈艳艳等121对苹果采摘机器人的末端执行器进行研究,末端执行器中含有气缸驱动的手指用于夹持目标苹果,有传感器用于检测夹紧力以防止损伤苹果表皮,还有用于切割苹果的楔形刀片切割装置。通过实验发现该采摘机器人能够有效采摘苹果,切断连接树枝,最大程度保证苹果表皮不受损伤,对苹果采摘行业有一定的影响。王宜磊等13)研制了一种猕猴桃采摘机械手,利用四指手爪抓取猕猴桃,通过机械手的旋转拉扯采摘猕猴桃,对四个手指的做运动学分析及受力仿真分析,证实方案的可行性,这种采摘方式虽然是应用于早期较硬的猕猴桃,但也很难避免采摘时过时受损,且猕猴桃生长在藤蔓上,仅仅依靠旋转拉扯的方式采摘的成功率受限。
王毅等141对柑橘采摘机器人的末端执行器进行研究,手爪为与柑橘形状配合的两个夹持面,将悬臂梁剪切方式改进为简支梁剪切方式,提高剪切成功率,通过实验测定柑橘的极限载荷和夹持机构的施加力范围,并制作样机,对比机器人采摘和人工采摘成功率,机器人采摘成功率更高。徐丽明等I151针对脐橙采摘机器人的末端执行机构进行设计及实验,机器人如图1-12所示,手指采用双v式,每个手指含两个转动关节,通过气缸控制V型手指的运动,采摘时将脐橙放置在手爪中心,控制手指运动,利用摩擦力固定脐橙,通过旋切机构将果实从果树上摘下,对该机械手模型进行了受力分析,并制作末端执行器样机进行采摘实验,成功率为95.28%,单果采摘时间少于2s,损伤率较低,有效提高了脐橙采摘率。
采摘机器人方面的研究取得了一定的进展,但目前仍存在一-些限制因素,比如机器人对果实的位置识别准确率有待提高,具体的采摘环境恶劣,果实的损伤率仍需降低,采摘类机器人采摘品种单一,研发周期长,制作成本高,推广困难等都限制了该领域的进一步发展,相信在未来的研究中问题会逐步解决,采摘类机器人的覆盖范围越来越大。
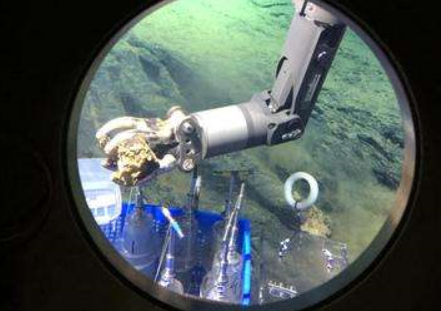
除了陆上的果蔬采摘类机器人,还有用于水下捕获的机器人。方子帆等l16]提出了一种仿鱼罩式无动力捕获装置,以传动的的鱼罩机构为基础,应用四杆结构设计出的新型捕获装置,机械手的捕获原理与传统鱼罩相同,应用弹簧实现机构复位,包括船体、起重机等在Pro/E中进行建模及仿真,所设计的捕获装置可实现目标运动轨迹及功能。周浩等[7设计了一款吸纳式水下机器人,通过水下视觉系统感知捕获目标,人为遥控控制水下机器人运动至合适位置实现吸取捕获,制作样机进行近海实验,验证了机器人的稳定性。
韩亮亮等[4)研制了-款仿章鱼的软体机器人,如图1-13 所示,用于捕获空间碎片。通过目标识别装置检测空间碎片,内部的通气管路可调整捕获手爪至最佳捕获位置,末端的捕获手爪中心有弹性气垫缓冲,各手指为软体触手,可根据捕获的空间碎片的形状进行调整,对该构型进行建模及仿真分析,可实现目标捕获,该研究创新性的提出了软体捕获,并验证了该方案的可行性,为后续的相关研究提供基础。
1.3.3多面体机器人
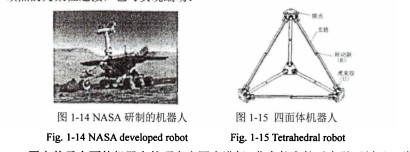
多面体机器人是以多面体为基本构型所设计的机器人。美国国家字航局研制的自动探测移动机器人,如图1-14所示,机器人的常态保持正四面体,每边都包含收缩单元,通过收缩单元的运动改变机器人的重心及形态,并优化控制方案可实现很大的收缩比,以适应复杂的地面情况。Lee等研究了-种模块化机器人,初始形态为正二十面体,通过控制36个伸缩杆实现滚动。Abrahantes 等人基于美国国家字航局的探测移动机器人,研究了一种可重构的移动机器人,初始状态为八面体,通过18根推杆的运动改变机器人的重心而实现移动。Zagal 等研究了一款八面体机器人,不同的是杆件运动是通过线绳控制的,可以实现在狭窄空间内蠕动。
Lyder与Stoy等研制了- -种包含主动连杆和被动连杆的模块化机器人,各杆件与各顶点的为柔性连接,也可实现蠕动。
国内关于多面体机器人的研究也同步进行。北京航空航天大学研制了一种并联机器人,四面体的六个棱边作为伸缩杆,通过绳索控制伸缩杆运动,实现翻滚运动。这款机器人的控制元件是绳索,降低整个机器人的控制精度,所以对于伸缩元件的精确控制还有待研究。北京交通大学机构创新与机器人实验室也做了关于多面体机器人的研究。秦俊杰19对URU链进行研究分析,将此链应用于四面体机器人中,如图1-15所示,对机器人进行了运动学分析、动力学分析仿真等,制作样机验证方案的可行性。
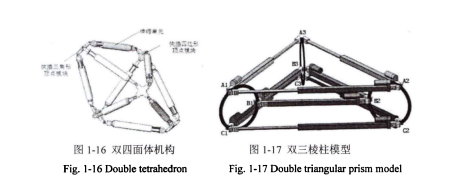
李虹江P91对双四面体进行了研究,提出了三种有效伸缩单元,并将其应用之机器人中,通过伸缩单元的运动,改变双四面体机器人的形态和重心等以实现预期的运动,如图1-16所示。王杰21将多面体机器人的伸缩单元进行模块化处理,创新性的提出了两种伸缩单元,将其应用于双三棱柱多面体,模型如图1-17所示,制作实验样机,通过控制新型模块化伸缩单元,使机器人实现自穿越运动。李锐明122)对多面体进行了可重构可展研究,设计了-些列可重构单元,利用该单元搭建了多种可重构可展多面体机构,形成了系统的多面体设计和构造方法,提高了环境适应性,为后续可重构机构奠定基础。
1.4 课题的研究内容及研究意义
本文提出了--种新型的海参捕获机械手爪,手爪构型基于阿基米德多面体,通过对典型的几种阿基米德多面体进行结构设计,实现海参捕获。文章的研究重点是传动机构的设计,即如何利用机构实现阿基米德多面体的展开和闭合,机构的运动学分析、动力学仿真及分析等。论文的主要研究内容如下:
在开展研究工作的前期,对海参产业做了相关调研,深入了解海参的生活习性、养殖方式、捕获方式等,计划针对滩涂养殖的特殊环境设计- -种可用于海参抓捕的机械手,初步确定设计要求。
调查国内外的研究现状,对相关的机械手进行对比分析,根据设计要求,对可用的构型或机械机构进行选型,确定采用阿基米德多面体为基本构型,设计基于多面体的海参捕获机械手。针对三种可利用的阿基米德多面体,分别设计了不同的机械结构,选取位置对称的两面作为上项面和下底面,其他的连接面则划分成相应的支链,通过驱动杆带动支链,支链带动底面,实现多面体展开和闭合,装配体自由度控制为1,且各支链之间可实现联动。
对机构进行运动学分析,动力学分析,对不同的多面体机械手采用不同参数的机构,并对三种抓捕机械手建立虚拟样机,完成了样机的机械结构设计,完成了样机和实验,所设计的多面体手爪可实现海参捕获。
本文对海参捕获机械手进行了研究井制作样机,课题技术创新,功能增强,具有明确的工程实用背景,具有很大的市场潜力。整个机械手解决了海参捕获问题,避免了对捕捞人员的身体伤害,整个结构的自由度为1,控制简单,结构稳定, .
同时多面体的外形可降低在捕获时对海参的伤害。该样机有望提高我国滩涂海参捕获的智能化水平,推动我国海洋渔业智能化的发展,同时该技术也可以继续在海洋捕捞、渔业捕获等领域进行扩展研究,具有广阔的应用前景。
1.5 本章小结
本章介绍了论文的研究背景,为减少海参捕获对人体造成的伤害,研发- -种用于海参捕获的机器人,介绍了相关领域的研究现状,包括仿生灵巧手的国内外研究现状、采摘抓捕机器人的国内外研究现状和多面体机器人的研究现状等,了解了相关领域的研究进展。明确了课题的主要研究内容包括前期海参习性的调研、手爪的基本构型设计、模型的运动学分析、动力学分析及仿真、样机制作及调试等工作,提出了论文的研究意义。
2多面体的选型
2.1引言
2.2设计需求
2.3阿基米德多面体选型
2.4本章小结
3构型的设计 与分析
3.1输入件的运动及设计
3.2探索支链的结构
3.3底面的设计
3.4构型尺寸
3.5本章小结
4机构的运动分析
4.1单回路
4.2双回路
4.3三回路
4.4本章小结
5动力学 分析与仿真
5.1.1截角立方体
5.1.2截角八面体
5.2运动仿真及分析
5.2.1截角 立方体手爪的仿真及分析
5.2.2截角八面体手爪的仿真及分析
5.2.3大斜方截半立方体手爪的仿真及分析 .
5.2.4仿 真结果对比分析
5.3本章小结
6样机的制作与实验
6.1加工方式
6.2结构设计
6.2.1转动副连接
6.2.2移动副连接
6.2.3底面固定连接
6.2.4电机选型
6.3样机装配及调试
6.4本章小结
7总结与展望
7.1 全文总结
目前海参养殖产业越来越好,海参捕获需求越来越大,通过对目前市场海参捕获的市场调研,人工捕获的比例占重,机械化智能化程度较低。对目前的机械手调研分析,发现用于海产品捕获的机械手稀缺,相关研究较少,因此针对海参的特殊养殖环境研制了-系列捕获机械手。本论文的主要工作如下:
(1)介绍了论文的研究背景,介绍了相关领域的研究现状,包括仿生灵巧手的国内外研究现状、采摘抓捕机器人的国内外研究现状和多面体机器人的研究现状等,了解了相关领域的研究进展。明确了课题的主要研究内容包括前期海参习性的调研、手爪的基本构型设计、模型的运动学分析、动力学分析及仿真、样机。
制作及调试等工作,阐述了论文的研究意义。
(2)提出了海参捕获手爪的设计需求,构型的自由度为1,考虑海参的生活习性而选择包络性较好的多面体,随后对阿基米德多面体进行简单介绍,13 种阿基米德多面体的演变过程,并对13种阿基米德多面体进行结构分析,划分项面、底面及支链,最后根据设计需求选定可用的三种阿基米德多面体,确定了海参捕获手爪的几何构型,以便针对相应的多面体进行结构设计,实现海参抓捕的功能。
(3)确定了输入件的运动方式及基本构型;探索支链的结构,前期的套简式结构只能应用于截角立方体手爪中,不满足其他两种多面体手爪的构型:后利用四杆机构探索的支链结构应用于截角八面体中,但支链的自由度不为一,仅仅通过输入杆的移动驱动支链的运动不确定,后在此结构上提出一-种新的模块化四杆机构,可通过串联的连接方式应用于截角八面体与大斜方截半立方体中,确定了支链的连接方式。最后对多面体底面的划分和连接方式进行对比分析,确定了多面体捕获机械手的最终设计方案,列出了构型中的关键零部件尺寸。
(4)以三种多面体手爪的构型中的其中- -条支链为模型做运动学分析,首先分析了截角立方体手爪中单回路末端杆件的角位移,角速度和角加速度,在mathmatics 中求解输出曲线,接着对截半八面体手爪的支链做了角位移分析,角速度的分析和角加速度分析,最后对大斜方截半立方体手爪的含三回路的支链做了运动学分析。
(5)对三种多面体手爪进行了运动学分析,在adams软件建立对应的运动学仿真模型,调节输入杆件的运动来观察整个手爪的运动状态,三种手爪均可按照预期的轨迹完成展开和闭合,输出多面体手爪底面质心点的位移曲线、运动轨迹、速度曲线和加速度曲线,对比分析三种构型的曲线,总结出各个手爪构型的优缺点及适合的应用方向,为后续样机制作提供了理论支持。
(6)针对大斜方截半立方体机械手做具体的结构设计,包括零件的加工形式,杆件与杆件的转动副连接方式、多面体与多面体之间的转动副连接方式、支链末端多边形与底面的固定连接方式,移动输入的具体实现方式等,选定机构后,根据实际情况选择了对应的丝杆电机最为整个手爪的输入,最后对加工的零件进行装配,安装电机驱动,对样机进行试验,验证设计方案的可行性。
本论文的设计创新点在于将阿基米德多面体应用于机械手爪的设计中,巧妙利用了阿基米德多面体的高度对称性,将多面体划分为类手爪形状,再利用串联的四杆机构实现支链中各多边形的转动。这种设计使各支链实现联动,通过基本的四杆机构控制运动,简化了手爪构型和控制部分,多面体构型也降低了捕获过程中对海参的伤害。
7.2 全文展望
针对复杂的养殖环境和危险的捕获环境,相关捕获机械手爪的研究意义巨大,在机械手的手爪样式提出创新性构型,功能性强,具有明确的工程实用研究背景,具有很大的市场潜力。这类机械的研发可以有望提高我国海洋渔业的智能化发展,且相关研究也可机械应用于其他类渔业捕获或者海洋捕捞等方面,具有广阔的应用背景。
本论文应用的阿基米德多面体在选型期间,排除了部分支链中含有旋转面的多面体构型,目前也涌现了-系列巧妙的空间多杆机构,可通过将空间机构应用于其他阿基米德多面体中,实现多面体的开合,开发更多基于阿基米德多面体的机械捕获手爪,完善多面体手爪体系。
另外本论文的研究也仅仅停留在理论设计计算,制作样机及实验的阶段,在以后的研究中应该更注重机械手爪的实际应用情况,考虑手爪材料的选型、水下压力和水流等对机械手爪的影响,电机及控制部分的防水性,海参的收集方法等问题,提高手爪的稳定性和抗干扰性,研制出完善的产品。
参考文献
[1]王英。刺参兔疫相关基因(AjFL-1 和AjCystain)的克隆表达与功能分析[D].大连:大连海洋大学,2018.
[2]韩至国。错过后悔!跟广电报- -起去海上捕捞野生海参,周日再出发![J/OL]. (2018-11-27)[2019-04- 20]. ht://ww.swhu.comv/a/276976123_ 99956900.
[3]靳果。韩星,韩枫。机器人员巧手的运动学分析及仿真[J]. 电子设计工程。201501)119-122.2
[4]左骏秋,张磊,金志鹏,等。服务机器人仿人灵巧手设计[].南通职业大学学报,2014(2);78-82.
[5]徐培培,刘旭,耀佳星,等多关节抓取灵巧手设计[J].建筑机械,2017(1):63-66.
6]马翔字,杨武成,李阿为。仿生机械灵巧手的手指设计[)].重庆理工大学学报(自然科学)2017011):123-127.
[7]王华。水下灵巧手运动学分析与实验[].机械传动,2012, 363):67-69.
[8]李磊,文力,王越平,等仿生软体吸附机器人:从生物到仿生[D].中国科学:技术科学,2018.48(12):21-33.
[9]张洁,李艳文。果蔬采摘机器人的研究现状、问题及对策[].机械设计,2010, 27(6):1-5.
[10]王海滨蓝莓植株多自由度系统撅动建模及仿真研究[D].哈尔滨:东北林业大学,2014.
[11]董其维。采摘机器人机械手夹紧装置优化设计-基于Pro/ E和ADAMS联合仿真[].农机化研究,2017(5)。
[12]李建伟,陈艳艳。苹果采摘机器人末端执行器的原理及试验研究[].农机化研究, 2017(9)。
[13]王宜磊,陈霖,易柳舟,等猕猴桃采摘机械手末端执行机构的设计D.食品与机械, 2018,34(]): 89-91.
[14]王毅,付舜,张哲,等。柑橘采摘机器人末蹦执行器设计与试验[].中国农业科技导报,2018,20(1):69-77.
[15]张明立。多而体变形机器人控制系统研究[D]北京:北京交通大学,2014.
[16]方子帆,徐浩,覃涛,等。仿鱼罩式无动力捕获装置设计与分析D]机械设计与研究,201 7(01):61-64+69.
[17]周浩,姜述强,黄海,等基于视觉感知的海生物吸纳式水下机器人目标捕获控制D].机器人, 2019, 41(2)。
[18]张春云,王印庚,荣小军,等国内外海参自然资源、养殖状况及存在问题([].渔业科学进展, 2004, 25(3);89-97.
[19]秦俊杰基于URU链的四面体移动机构理论与实验研究[D].北京:北京交通大学,2012.
[20]李虹江。伸缩单元及双四面体伸缩移动机器人的研究[D].北京:北京交通大学,2014.
[21]李锐明。可重构可展多面体机构的设计与理论研究[D].北京:北京交通大学,2017.
[22]王杰模块化伸缩单元及多面体机器人的设计与研究[D].北京:北京交通大学,2017.
[23]柴影。关于柏拉图体与阿基米德多面体性质的研究[D].北京北京交通大学,2016.
[24]王硕。自适应越障臒带式移动机构的研究[D].北京:北京交通大学,2018.
[25] Wustmann P M. An altemative locomotion unit for mobile modular self-reconfigurable robotsbased on archimedes screws[C]// Intermational Symposium on Mechatronics & Its Applications.2013.
[26]皮志峰,海参捕捞机器人技术研究[D].哈尔滨:哈尔滨工程大学,2017.
[27] Wustmann P M. An altemative locomotion unit for mobile modular slf-reonfigurable robotsbased on archimedes screws[C]W Intemational Symposium on Mechatronics & Its Applications.2013.
[28] DAVID DAWSON. CHINA'S TINKERERS[J]. The World of Chinese, 2017(05):24-25.
[29]韦豪华,张红玲,李兴太。海参化学成分及生物活性研究进展[J].食品安全质量检测学报,201 7, 8(6):2054-2061.
[30] Kunzig R. Deep-Sea Biology: Living with the Endless Frontie[J]. Science, 2003,302(5647)991-991.
[31] Kim B H, Lee J, Won S M, et al. Three Dimensional Silicn Eletronic Systems Fabricated byCompressive Buckling Proces[J]. Acs Nano, 2018, 12(5):4 164.
[32] Aukes D M , Goldberg B , Curkosky M R . et al. An analytic framework for developinginherently-manufacturable pop-up laminate devices[]. Smart Materials and Structures, 2014,23(9);094013.
[33] Hu X. Huang X, Hu T, et al. A Minimal Dataset Construction Method Based on SimilarTraining for Capture Position Recognition of Space Robot[J]. Wireless PersonalCommunications, 2018(8):1-14.
[34] ORourke J . How To Fold It: The Mathemalics of Linkages, Origami, and Polyhedra[M]. 2011.
[5]刘燕德。王观田,王均刚等,水果无损采摘机械手工作空间分析及参数确定[J]农机化研究, 2019.41(4):18-23.
[36] Griti H, Khraeif N. Belghith s. Cyclic-fold bifurcation in passve bipedal walking of acompass-gait biped robot with leg length discrepancy[C]/ IEEE Interational Conference onMechatronics. 2011.
[37] Efmovskaya A. Lin Y W, Shkel A M. Origami-Like 3-D Folded MEMS Approach forMiniature Inertial Measurement Unit[J]. Journal of Miceoletromnechanical Systems, 2017,PP(99):1-10.
[38] Joe H M. Oh J H. Balance recovery through model predictive control based on capture pointdynamics for biped walking robot[J]. Robotics & Autonomous Systems, 2018,105:S0921889017305493.
[39] Griti H, Khraief N. Belghith s. Priod-three route to chaos induced by a cyelic-fold bifurcationin passive dynamic walking of a compass-gait biped robot[J]. Communications in NonlinearScience & Numerical Simulation, 2012, 17(1 1):4356-4372.
[40] Xu s, Yan乙Jang K 1, et al. Materials science. Assembly of mico/manomaterials into complex,threedimensionalarchitecturesbycompressive buckling[J]. Science,2015,347(6218):154-159.
[41] Sugiura Y, lgarashi T, Takahashi H, et al. Graphical instruction for a garment fling robot[M].2009.
[42] Russell F s. A net for catching plankton near the bottom[J]. Joumal of the Marine BiologicalAssociation of the United Kingdom, 1928, 15(): 105-108.
143] Shafiee Ashtini M, Yousef-Korma A. Sariat-Panahi M, et al. Push rcover of a humanoidrobot based on model predictive control and capture point[C]/ Intermational Conference onRobotics & Mechatronics, 2017.
[44] Yim S, Kim S. Origami-inspired printable tele-micromanipulation system[CW IEEEIntermational Conference on Robotics & Automation. 2015.
[45] Janbaz S , Noordzij N , Widyaratih D s , et al. Origami ltites with feeform surfaceormaments[]. Science Advances, 2017, 3011):eao1595.
[46] Sutton T T. Vertical cology of the pelagic ocean: cassical pattems and new perspectives[J].
Joumal of Fish Biology, 2013, 83(6):1508-1527.
[47]杨超,张铭钧,秦洪德,等。水下机器人-机械手姿态调节系统研究[]哈尔滨工程大学学报, 2018, 39();:77-383.
[48] Koustoumpardis P N, Chatzilygeroudis K I, Synodinos A I, et al. Human Robot Collaborationfor Folding Fabrics Based on Force/RGB-D Feedback[M]/ Advances in Robot Design andInelligent Control. 2016.
[49] Felton s, Tolley M, Demaine E, et al. Applied origami. A method for building self-foldiggmachines[]. Science, 2014, 345(6197):644-646.
[50]彭艳,刘勇敢,杨扬,等。软体机械手爪在果蔬采摘中的应用研究进展[].农业工程学报,2018, 3409;11-20.
[51] Shigemune H, Maeda s, Hara Y, et al. Origami Robot: A SelfFFolding Paper Robot With anElectrothermal Actuator Created by Printing[] IEEE/ASME Transactions on Mechatronics,2016, 21(6)2746-2754.
[52] Onal C D, Tolley M T, Wood R J, et al. Origami-Inspired Printed Robts[]I IEEE/ASMETransactions on Mechatronics, 2015, 205);2242221.
致谢
本论文的工作是在我的导师姚燕安教授的悉心指导下完成的。论文前期的方向确定,如何推进,具体的设计过程直至论文最终完成给予了极其有益的教导与指引。恩师的广阔的前沿视野,独特的科研思路,严谨的治学态度,温文尔雅的学者风度和虚怀若谷的宽广胸怀,使我受益终身。在此裹心感谢姚老师一直以来对我关心和指导,在此向姚老师致以衷心的感谢和崇高的敬意。
感谢李锐明师兄,总是在我遇到棘手问题的时候给予我帮助,督促我积极完成论文的研究工作。在实验室工作及论文撰写期间,刘趣老师、刘然师姐、孙学敏师姐、武建煦师兄、王志瑞师兄、徐小景师兄、魏超然师兄、张喆师姐,张迪师兄、姚舜师兄、荀致远师兄、刘洋师兄、何妍颖师姐对我的帮助很大,酣心地为我解答疑感,对我的论文提出修改建议,让我学习到了更多的专业知识,在生活中也很关心我,孙军权、马艳、王子谦、申栋栋、王冠、王森、宁亚飞等同学也对我论文的研究给予了热情帮助,再次向他们表达我真挚的感激之情。感谢在样机加工过程中给子我帮助的李可峰师弟。
衷心感谢我的父母,妹妹、老公及其他家人对我在硕士学习期间学习生活等方面的关怀,在我遇到困难时不断给予我鼓励,感谢他们一路以来的陪伴。
(如您需要查看本篇毕业设计全文,请您联系客服索取)