24小时论文定制热线
24小时论文定制热线
摘 要
本文以某导航综合控制装置项目为研究背景,阐述了基于双 DSP+FPGA 架构的弹 载计算机板的硬件设计,使用单台计算机实现导航和飞控任务处理,不仅有效地减少了 导航控制系统的体积、成本和功耗,提高了系统的可靠性,同时又完全保留了传统设计 中双计算机系统导航和飞控任务独立完成的优点。本文主要对硬件电路和基于 FPGA 的 数据通信模块进行了研究与设计。
弹载计算机板的硬件电路主要分为供电复位模块、核心处理模块和信号接口模块。 其中,供电复位模块为弹载计算机各个模块提供电源以及复位信号。核心处理模块采用 双 DSP+FPGA 架构,主 DSP 完成飞控计算,从 DSP 完成导航解算,双 DSP 之间通过 McBSP 串口进行通信;FPGA 芯片用于数据采集和扩展外围接口,与 DSP 通过 EMIF 接口进行通信。信号接口模块主要完成核心处理模块和外围通信模块的电气匹配及隔 离。
基于 FPGA 的数据通信模块采用自顶向下的设计方法和 Verilog HDL 硬件编程语言 在 Xilinx 的 ISE 开发环境下实现 FPGA 的逻辑控制,主要包括电压量采集模块、串口数 据收发模块和 CAN 数据收发模块。
最后对硬件电路和 FPGA 数据通信模块进行测试。首先,对弹载计算机板进行上电 测试,确保上电后,弹载计算机板可以正常工作;然后对电压量采集模块、串口数据收 发模块和 CAN 数据收发模块进行相关测试,确保所设计的每个模块都能实现功能。测 试结果表明弹载计算机能够满足系统的设计要求。
关键词:弹载计算机 FPGA AD 采集 串口通信 CAN 通信

Abstract
This paper takes a navigation integrated control device project as the research background, and expounds the hardware design of the missile-borne computer based on dual DSP+FPGA. Using a single computer to complete navigation and flight control task processing, not only effectively reduces the volume, cost and power consumption of the missile-borne computer, but also improves the reliability of the system. At the same time, the advantages of the dual computer system in the traditional design are completely preserved, that is, the navigation and flight control tasks are independently completed. This paper mainly studies and designs hardware circuits and FPGA-based data communication modules.
The hardware circuit of the missile-borne computer is mainly pided into a power supply reset module, a core processor module and a signal interface module. The power supply reset module provides power and reset signals for each module of the missile-borne computer. The core processing module adopts dual DSP+FPGA architecture, the main DSP completes the flight control calculation, the secondary DSP completes the navigation solution, and communication between dual DSPs is achieved through the McBSP serial port; the FPGA chip is used for data acquisition and expansion of the peripheral interface, and communication between FPGA and DSP is realized through EMIF interface. The signal interface module mainly completes the electrical matching and isolation of the core processing module and the peripheral communication module.
The data communication module based on FPGA adopts top-down design method and Verilog HDL hardware programming language to realize FPGA logic control in Xilinx ISE development environment, including voltage acquisition module, serial data transceiver module and CAN data transceiver module.Finally, the hardware circuit and the FPGA data communication module are tested. Firstly, the power-on test was carried out to ensure that the missile-borne computer board can work normally after power-on. Then, the voltage quantity acquisition module, the serial port data transceiver module and the CAN data transceiver module are tested to ensure that each module designed can achieve the function. The test results show that the missile-borne computer can meet the design requirements of the system.
Key Words: The missile-borne computer FPGA AD acquisition Serial communication CAN communication
目录
第 1 章 绪论
1.1 课题背景及意义
随着航空航天技术的不断发展,现代战争已经转变为一个国家科技实力的战争。自在 第二次世界大战中(以下简称"二战"),德国首次使用导弹作战开始,导弹便进入了大 规模发展时期[1].经过 60 多年的发展,导弹和火箭弹等制导武器在现代战争中广泛使用, 其发挥的作用也越来越大。而随着制导武器对精确打击和复杂电磁环境适应性要求的不断 提高,未来战争对导弹自身搭载的导航与控制系统提出了更高的要求(如功能多元化、毁 伤精确化、小型化等)。因此,研制出高精度、远射程、低成本的制导武器对精确打击目 标具有重大意义。 弹载计算机作为导弹等制导武器的总体控制模块,其性能对制导武器的打击效果有很 大影响。对于传统的导弹来说,弹上包括 2 个任务处理系统,即导航计算机和飞控计算机。 导航计算机的主要任务是对弹体的运动信息进行接收和计算,按照导引规律和预定的弹道 形成导引指令,并将导引指令传送给飞控计算机。
飞控计算机的主要任务是根据导航计算 机形成的导引指令控制弹体按照预定弹道飞行,并精确命中目标。虽然传统的双任务处理 系统的导航与控制软件独立运行,任务处理界面比较清晰,但其体积、功耗和成本都比较 高。为了降低导弹等制导武器任务处理系统的体积、功耗和成本,以及提高导航与控制系 统的运算能力、集成度和实时性,本课题研究并设计了基于双 DSP(Digital Signal Processing,数字信号处理器)和 FPGA(Field-Programmable Gate Array,现场可编程门 阵列)的一体化弹载计算机的硬件模块,将导航计算机和飞控计算机集为一体,充分利用 了 DSP 和 FPGA 芯片的特点。与以往的双计算机系统相比,不仅有效地控制了体积和成 本,而且可以满足弹载计算机对运算能力和外设接口能力的需求,对弹载计算机的发展具 有重要意义[2].
1.2 国内外发展现状
1.2.1 导弹的发展现状
自从德国在二战中应用导弹武器开始,美国、英国、法国等国家就着手进行导弹的研 制。这一阶段,各个国家加大了对导弹研制资金的投入,扩大了导弹的生产规模,主要研 究了导弹的关键技术和基础理论,并开始研制新的导弹武器,解决了导弹从无到有的问题, 但是导弹的作战性能还比较差。自 20 世纪 60 年代起,各个国家增加了对所缺少的导弹类 型的研究,同时也对已有导弹类型进行了改进(如提高制导系统的精度和抗干扰能力、减轻导弹的质量、缩小导弹外形尺寸及改进发动机性能等),提高了导弹的质量和作战性能。 从 20 世纪 70 年代开始,随着国际形势的变化、战争的刺激等,各国都加快了导弹的更新 速度。在这一阶段,随着计算机技术的发展,导弹的设计思想有了新的变化,开始模块化 地研制导弹,并在研制导弹的各个环节广泛应用了计算机技术,使导弹的作战性能显著提 高(如美国的弹道导弹"侏儒"、空空导弹"不死鸟",前苏联的弹道导弹"SS-20"、 防空导弹"SA-12"等)。进入 20 世纪 80 年代后,随着战争理论的改变、科学技术的进 步、"精确打击"概念的提出,导弹开始向精确制导、智能化等方向不断发展[3].
1.2.2 弹载计算机的发展现状
20 世纪 70 年代,随着 Zilog 公司的 Z80 微处理机和 Intel 公司的 8080 微处理机的问 世,美国就有了研制弹载计算机的想法,并公布了他们的研制方案。由于技术水平的限制, 当时微处理机的处理精度和运算速度都满足不了导弹各分系统对计算能力、数模/模数转 换精度和速度以及存储器容量的要求,故当时的高速运算器采用高速卫片、硬件乘法器等 搭建。直到 80 年代,随着几代 Intel PC 机和 DSP 芯片的不断更新,弹载计算机技术也开 始飞速发展,不仅运算速度、抗干扰能力等进一步提升,而且体积、功耗及成本等也在逐 渐减小。目前,国外的弹载计算机在硬件设计方面比较成熟,现在更注重于导航与控制算 法的研究[4-7]. 我国的弹载计算机技术也发展的非常迅速,从 80 年代开始研制到现在,研究人员提 出了很多设计方案,各有所长。如哈尔滨工程大学的徐小淇、南京理工大学的李玉寰等设 计的导航计算机,浙江大学的喻少林、中北大学的蔡亦清等设计的飞控计算机都采用 DSP+FPGA 架构,虽然采用的芯片不一样,但其实现功能的方法类似,利用 DSP 芯片进 行导航解算和飞控计算,利用 FPGA 芯片实现数据采集与拓展外围接口,并进行中断控 制等。南京航天航空大学的仲筱艳设计的飞控计算机提出了另外一种拓展外围接口的方 案,即 DSP+CPLD(Complex Programmable Logic Device,复杂可编程逻辑器件),利用 DSP 作为核心处理器进行飞控计算,利用 CPLD 的复杂可编程特性拓展外围接口与实现 中断控制。北京理工大学的孔得鹏设计的弹载计算机采用多核 DSP+FPGA 架构,其中多 核 DSP 不仅可以进行复杂的运算,也可以并行处理任务[8-13]. 导航任务处理系统与飞控任务处理系统独立设计会使芯片的资源得不到充分利用,从 而降低了芯片的资源利用率,同时也增加了成本、功耗等。目前,业内已经有设计人员提 出将分散的导航系统和飞控系统组合在一起进行设计,打破以往的按照功能进行独立设计 的方法,充分利用硬件资源。对弹载计算机的硬件电路按照各个模块的功能进行集成,可 以增大器件的利用率并可以同时降低设计成本和后期维护成本,使系统更加稳定、可靠地 工作。目前,国内外科研单位设计的弹载计算机主要有以下 4 种方案:
(1)DSP 结合 ARM(Advanced RISC Machines,ARM 处理器),运算能力强大的DSP 芯片在导航解算和飞控计算方面比较有优势,而接口丰富、体积小、功耗低的 ARM 芯片适合数据采集和控制管理弹载计算机系统,这类处理器架构既提高了弹载计算机的性 能,也有效地控制了弹载计算机的体积和功耗。但由于 ARM 芯片的结构比较固定,一旦 选定,弹载计算机的功能也被确定,故在研发过程中随着问题出现而有需求变化的弹载计 算机必须重新选型,会使研制成本增加。
(2)DSP 结合单片机,这种设计方案也是利用 DSP 来实现导航解算和飞控计算,不 同的是用单片机来实现数据采集和拓展外围设备接口等功能。由于单片机的工作频率和运 行速度比较低,这类弹载计算机也存在许多不足,例如 DSP 与单片机的通信速率较慢且 编程比较复杂,不能灵活的进行外围设备接口的拓展,弹载计算机的可靠性也比较低,另 外由于单片机外围电路的元器件数量比较多,使电路的集成度不高。
(3)单片机结合 ARM,由于单片机是一种低端控制器,ARM 处理器采用精简指令 集,故这类弹载计算机虽然控制能力非常强大,但由于其运算速度和运算精度比较低,无 法满足现代战争中弹载计算机对大量导航数据和飞控数据进行实时处理的要求。
(4)单片或多片 DSP,这类弹载计算机一般选用浮点运算,其信息处理精度高、速 率高,可对导航和飞控数据进行实时处理,但是由于 DSP 芯片的外围设备接口比较少, 因此需要通过 FPGA 或 CPLD 拓展外围设备接口来增加控制功能,虽然这会增大硬件电 路板的体积和功耗,但其结构比较稳定,而且系统升级时,只需要升级软件,不需要对硬 件做改动,降低了研制成本。
1.3 弹载计算机的设计方案
弹载计算机在导弹飞行过程中需要处理的数据非常多,导航系统对所测量的弹体运动 信息进行导航解算并将结果发送给飞控系统,飞控系统对其进行计算并发出控制指令控制 导弹按照预定弹道向目标飞行。导弹在点火到击中目标的过程中,除了需要导航系统与控 制系统外,还需要其它分系统的协助,因此,弹载计算机还将推进系统、测发控系统、引 信战斗部系统、遥控遥测系统、导引头系统及舵机等分系统联系在一起,使各分系统之间 能及时传递信息。 导航系统与控制系统是导弹不可缺少的组成部分。
在本文中,导航系统对惯性导航模 块和卫星导航接收模块测得的弹体的运动信息进行导航解算,可知导弹的具体位置、航角 等信息,并将这些信息与预定值进行比较,由两者之间的偏差量形成导引指令,然后将导 引指令传送给控制系统,以便控制系统向导弹发出控制指令与时序信号,随时调整导弹的 运动方向和飞行姿态,导引导弹按规定的精度命中目标。弹载计算机需要对弹体的运动参 数及位置等信息进行高效、有效、实时的处理,如果不能及时地进行导航解算和飞控计算 并对其它系统发出控制指令,那么导弹最终可能不能命中目标。而这些信息的信息量比较 大且在不断的变化,故弹载计算机需要能高效、实时地处理这些信息。对于推进系统来说,导弹点火后,推进剂的燃烧导致其质量逐渐减小,因此作用在弹 体上的推力、重力和气动阻力等也在持续变化。而弹体的飞行速度和轨迹的变化规律与弹 体质量及推力的变化规律有关,弹体质量及推力变化通过传感器转换为电信号,这些变量 不停地变化而且变化速度比较快,故信息量比较大,因此,弹载计算机需要对大量信息进 行及时处理。
测发控系统主要由测试系统和发控系统组成。在导弹发射之前,测试系统通过对电压 量、脉冲量、开关量、频率等信号的测量来完成导弹的控制系统和其它系统电器设备性能 的检查。除此之外,测试系统还要测试导弹的供配电情况、导弹的静态各项指标以及导弹 在模拟飞行过程中各系统的工作状态等,并将测试结果回报给导弹主控系统。导弹主控系 统判断回报的检测信号都处于正常状态(即导弹具备发射条件)后,向发控系统发出"发 射授权"命令。随后,发控系统设定导弹的射击参数、初始状态和初始基准等信息,并根 据流程或命令要求通过 CAN(Controller Area Network,控制器局域网络)总线发送相关 命令到弹载计算机,弹载计算机完成相关数据的装订、采集后,按照相关要求通过 CAN 总线回传数据到测发控系统。测发控系统判断相关信息无误后,控制导弹发动机点火发射, 使导弹飞离发射装置并获得所需的初始姿态和速度。
当系统要求中断发射或导弹发射出现 异常时,发控系统还要能强行终止发射或给出不点火指令,当出现紧急情况(如危及人员 及载机安全)时,也能对导弹进行应急丢弃。弹载计算机与地面测发控系统通信的过程中, 既有模拟信号,也有开关信号,信号种类和数量都比较多,故弹载计算机对某些信号要及 时处理。导弹借助引信战斗部实现对目标的精确打击。引信战斗部由 3 部分组成,其中,战斗 部按照要求直接完成战斗任务,而引信主要是在预定时间、地点,按照预定方式引爆战斗 部。战斗部在最佳时机引爆会摧毁目标,但是在不适当的时间引爆,就会造成人员、经济 等多方面的损伤。保险装置主要是在弹载计算机的控制下,保证战斗部在运输、存储、发 送和飞行时不会发生爆炸,当导弹飞近目标时,又可以解除保险引爆战斗部。引信引爆战 斗部、保险装置解除保险等都对时间有非常严格的要求,弹载计算机在处理弹体与目标交 会信息并发出控制指令时要实现对时间的精确把控。 遥测遥控系统是与导弹配套的设备之一,主要实现导弹发射之后的远距离测量、控制 和监视。在导弹发射之后,遥测系统利用传感器将导弹的各种非电量数据转换为电信号, 载波于遥测发射机产生的高频无线电波发回地面,地面通过遥测接收设备接收这些数据之 后,送到数据处理系统进行解调、记录、处理分析,为导弹的性能评定、设计改进和故障 分析等提供数据。同时,遥控系统将遥控指令编码后载波于高频无线电波发送到遥控接收 机,遥控接收机接收并解调后发送到飞控计算机,从而发出控制指令使执行机构工作。即 遥测遥控系统与弹载计算机之间需要传输的信号有导弹的实际工作状态、飞行姿态、遥控 指令等,为了更好地评定导弹的性能以及使导弹及时执行遥控指令,这些信息需要在两个 系统之间及时传输,弹载计算机要使这些信息在两个系统间准确、快速地进行传输。在导弹发射之前,首先需要捕获选定目标的位置、速度等信息,然后通过测发控系统 将这些信息装订成初始跟踪指令,通过 CAN 总线经由 FPGA 传送给 DSP 进行处理,进而 确定导弹打击目标的参数信息,而目标信息的获取就是由导引头系统完成的。当导弹发射 之后,由导引头及时捕获目标的运动信息,以便弹载计算机发出控制指令调整导弹的打击 方位,最终精确命中目标。如果导引头不能及时地把目标信息传送给弹载计算机,那么导 弹最终可能打不中目标,故弹载计算机要满足信息实时传输的要求。
在导弹的飞行过程中,舵机根据飞控系统发出的舵偏角信号等信息,通过改变发动机 的推动矢量或操纵导弹的舵面或副翼产生控制力,克服气动铰链力矩和弯曲力矩;同时, 舵机将利用敏感元件得到的当前的舵位置及航偏角等信息反馈给飞控系统,以便控制导弹 稳定飞行。当舵机系统发生故障不能正常工作时,飞控系统发送的安控指令将驱动舵面按 照预先设定好的偏转角度进行偏转,并配合导弹的自毁动作实现保护功能。无论是飞控系 统发出的控制指令还是舵机反馈给飞控系统的信息都时刻在变化,而且信息量比较多,这 就需要弹载计算机的信息处理量比较大且处理速度比较快。 导弹在作战时需要各个分系统之间的配合,故弹载计算机需要多个外设接口将各个分 系统之间联系起来进行通信。各个分系统的各个信号的时刻变化导致了弹载计算机需要处 理大量信息,而且为了使导弹能够精准地打中目标,需要对这些信息进行高效、实时地处 理。 对1.2.2 节介绍的弹载计算机的 4 个设计方案中的优缺点进行分析,本设计采用第 4 种设计方案,其中,DSP 的信息处理精度高、速率高,可满足弹载计算机对数据的处理 要求,为了使导航与控制软件独立运行,任务处理界面比较清晰,本系统采用 2 片 DSP 分别进行导航解算与飞控计算;但是由于 DSP 芯片的外围设备接口比较少,因此需要通 过 FPGA 或 CPLD 拓展外围设备接口来增加控制功能,借鉴其它产品的设计,采用双 DSP+FPGA 架构来实现弹载计算机的功能,其中双 DSP 进行导航解算与飞控计算,FPGA 完成弹上信息的采集和扩展外围接口。
1.4 本文主要内容
本文主要研究与设计了导航综合控制装置中的弹载计算机模块。从系统功能、研发成 本与风险等多方面考虑,弹载计算机的核心处理模块采用双 DSP+FPGA 架构。本文从硬 件电路和基于 FPGA 的数据通信模块两方面进行了研究与设计,其主要内容如下:
第 1 章,绪论。首先对本课题的研究背景及意义、弹载计算机的国内外发展现状进行 了简要分析,其次分析了目前国内外科研单位设计的弹载计算机的设计方案,并确定了本 文弹载计算机的设计方案,最后对本文主要章节内容进行了概述。
第 2 章,系统总体分析。首先简要介绍了总体项目的功能与组成部分,其次分析了弹 载计算机的功能与需求,重点对硬件设计方案和器件选型进行了设计分析,最后介绍了基 于 FPGA 的数据通信模块的设计方案。
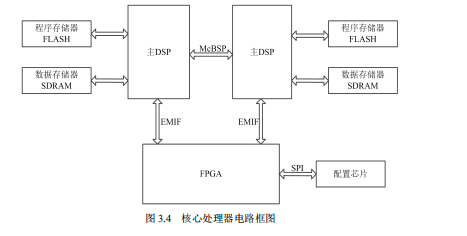
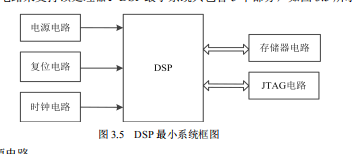
第 3 章,硬件电路板设计。弹载计算机板的硬件电路主要分为 3 个模块,即供电复位 模块、核心处理模块和信号接口模块。其中,供电复位模块主要为系统提供电源和复位信 号。核心处理模块利用双 DSP 和 FPGA 实现系统功能,双 DSP 采用 TI 公司的 TMS320C6713B,主 DSP 完成飞控计算,从 DSP 完成导航解算,双 DSP 之间通过 McBSP (Multi-channel Buffered Serial Port,多通道缓存串口)通信;FPGA 选用 Xilinx 公司的 XC6SLX150,用于数据采集和扩展外围接口,通过 EMIF(External Memory Interface,外 部存储器接口)与 DSP 进行通信。信号接口模块主要完成核心处理模块和外围通信模块 的电气匹配及隔离。
第 4 章,基于 FPGA 的数据通信模块设计。采用 Verilog HDL 编程语言和自顶向下的 设计方法在 Xilinx 的 ISE 开发环境下实现 FPGA 逻辑控制,详细介绍了电压量采集、串 口数据收发和 CAN 数据收发三部分的具体实现过程及仿真结果。
第 5 章,系统测试。首先,对弹载计算机板进行上电测试,确保上电后,弹载计算机 板可以正常工作;然后对电压量采集模块、串口数据收发模块和 CAN 数据收发模块进行 相关测试,确保所设计的每个模块都能实现功能。 结论。首先,对毕业课题的完成情况进行了总结,然后简单描述了创新点,最后对本 课题还需完善的地方和后续的研究方向进行了说明与展望。
第2章系统总体设计
2.1课题项目 简介
2.2总体分析
2.3系统硬件 电路设计方案分析
2.3.1硬件 电路总体设计分析
2.3.2核心 器件选型
2.4基于 FPGA的数据通信模块设计方案
2.5本章小结
第3章系统硬件设计
3.1供电复位模块
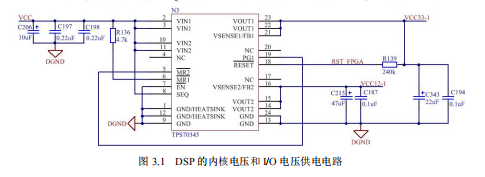
3.1.1 DSP 供电电路
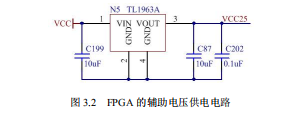
3.1.2 FPGA 供电电路
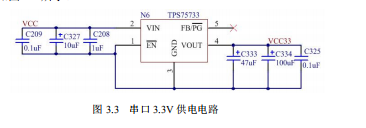
3.1.3数字芯片 供电电路
3.1.4复位电路
3.2核心处理模块
3.2.1 DSP 模块设计
3.2.2 FPGA 模块设计
3.2.3双DSP之间的通
3.2.4DSP与FPGA之间的通信
3.3信号接口棋
3.3.1模拟量采集电路
3.3.2串口通信电路
3.33 CAN 通信电路
3.3.4时序输出控制及状态回采电路
3.4本章小结
第4章基于FPGA的数据通信模块设
4.1电压量采集模块
4.1.1 AD7606 时序分析
4.1.2 AD7606 采集模块的实现
4.2串口通信模块
4.2.1异 步串行通信标准
4.2.2串 口通信的实现
4.3 CAN 通信模块
4.3.1 CAN 报文帧
4.3.2 MCP2515 时序分析
4.3.3 CAN 总线通信的实现
4.4本章小结
第5章系统测试
5.1弹载计算机板
5.2系统 上电测试
5.3电压量采集测试
5.4串口测试
5.5 CAN 通信测试
5.6本章小结
结论
针对导航综合控制装置对弹载计算机的要求,本课题提出了基于双DSP+FPGA架构的硬件设计方案,主要完成硬件电路设计和基于FPGA的数据通信模块的设计。其中,2片DSP都采用TI的TMS320C6713B,主要完成导航解算和飞控计算;又由于DSP串口数量有限,而且其缓存能力较弱,采用FPGA进行串口拓展,降低了外围设备对DSP资源的消耗。本文主要研究内容如下:
(1)方案分析及器件选型:对系统进行了需求分析,并完成了整体设计方案。针对弹载计算机提出的小型化、集成化和高性能等方面的要求,采用DSP进行数据处理,但由于DSP串口数量有限,无法满足弹载计算机同时与多路设备进行通信的要求,采用FPGA进行串口拓展,故核心处理模块采用双DSP+FPGA架构,并对DSP和FPGA芯片进行了选型分析。
(2)硬件电路设计:硬件电路主要分为3个模块,即供电复位模块、核心处理模块和信号接口模块。其中,供电复位模块主要为系统提供电源和复位信号。核心处理模块利用双DSP+FPGA来实现系统功能,双DSP都采用TI的TMS320C6713B,主DSP完成飞控计算,从DSP完成导航解算,双DSP之间通过McBSP串口通讯;FPGA选用Xilinx的XC6SLX150,用于数据采集和扩展外围接口,通过EMIF接口与DSP进行通信。信号接口模块主要完成核心处理模块和外围通信模块的电气匹配及隔离。
(3)基于FPGA的数据通信模块:数据通信模块主要分为三部分,即电压量采集模块、串口通信模块和CAN通信模块,其中,电压量采集模块首先分析了AD7606的转换时序和并行输出时序,然后根据AD7606的CONVST时序图和并行输出工作方式的时序图,对2片ADC的转换顺序控制和ADC数据采集模块的实现流程进行了设计,最后采用截尾均值法对采集的电压量进行处理。串口通信模块以异步串行通信为例,首先介绍了异步串行通信的通信标准和总体设计思路,然后采用相位分频原理产生串口波特率,发送模块主要是对发送FIFO中的数据进行并串转换,然后发送给外围设备;接收模块主要是对外围设备要发送给DSP的数据进行串并转换,然后写入接收FIFO.CAN通信模块首先介绍了CAN报文帧的格式,然后分析了MCP2515的SPI输入输出时序和寄存器读写时序,最后CAN通信的初始化就是对相关寄存器进行配置,报文接收采用中断接收方式完成,报文发送采用查询方式完成。
(4)最后对系统进行测试:首先对各个供电芯片进行了测试,确保电源供给模块功能正常,即系统上电后可正常工作;然后分别对AD采集模块、串口通信和CAN通信模块进行了测试。AD采集测试通过DSP读取11路通道的采集电压来验证功能,测试结果表明11路通道均能进行数据采集,且采集精度满足系统要求;串口模块借助串口板卡进行测试,测试结果表明8路串口都能实现数据的收发;CAN通信模块借助CANoe来进行测试,测试结果表明CAN通信数据的收发都能实现。即本系统所设计的弹载计算机板的各部分功能都能够满足系统要求。
本文的创新点体现在:在弹载计算机中,双DSP一般通过双端口RAM进行通信,这就需要增加额外的双口RAM芯片。与其它弹载计算机相比,本文研究设计的弹载计算机的双DSP通信是通过McBSP串口来实现的,不需要外接其它通信芯片,在硬件连接方面比较简单,不需要复杂的逻辑控制。这种通信方式在其它应用领域已经比较成熟,但在弹载计算机领域应用的比较少,因此基于McBSP串口的通信方式在航空航天领域还是比较有前景的。由于某些客观原因,本文只对系统硬件电路进行了研究设计,完成了基于FPGA的数据通信模块程序的编写与调试,还有以下几方面可以进行改进:
(1)系统联调,本设计已经完成了弹载计算机板主要部分的调试,但是还没有进行系统联调,后续应该再进行系统联调。
(2)导航解算和飞控计算的研究,本课题虽然针对的是硬件电路模块的设计,但是弹上的导航解算和飞控计算也非常重要,后续工作应该在DSP软件方面进行深入研究。
参考文献
[1] 沈如松,宋贵宝,周文松,等。 导弹武器系统概论[M]. 北京:国防工业出版社,2010. 1-2.
[2] 李翠娟,缑丽敏,贺莹,等。 基于双 DSP 的某弹载计算机的设计与实现[J]. 上海: 电子技术,2016,45(06):46-48+45.
[3] 金永德,崔乃刚,关英姿,等。 导弹武器系统概论[M]. 哈尔滨:哈尔滨工业大学出 版社,2002. 1-7.
[4] Cho,Seong Yun,and G Chan. A Personal Navigation System Using Low-Cost MEMS/ GPS/Fluxgate[C]. Proceedings Ion Am,2003.
[5] Yan Bin Gao,Hui Yu Liu,Xing Zhi Zhang,etal. The Design and Implementation of MSINS/GPS Navigation Computer[J]. Applied Mechanics and Materials,2014.2958(490)。
[6] 闫东亚。 基于 DSP/FPGA 的组合导航系统研究与实现[D]. 哈尔滨工程大学,2014.
[7] 夏春杰。 基于TMS320C6747和 FPGA 的 GPS/SINS组合导航系统研究[D]. 南京理 工大学,2013.
[8] 徐小淇。 基于 DSP 和 FPGA 的导航计算机系统设计[D]. 哈尔滨工业大学,2016.
[9] 李玉寰。 基于 DSP 和 FPGA 的机载导航计算机设计[D]. 南京理工大学,2010.
[10] 喻少林。 基于 DSP+FPGA 的微小型无人机飞控计算机研究[D]. 浙江大学,2011.
[11] 蔡亦清。 基于 DSP 和 FPGA 的飞行器双核控制设计[D]. 中北大学,2017.
[12] 仲筱艳。 基于 DSP 的飞控计算机的研究设计[D]. 南京航空航天大学,2004.
[13] 孔得鹏。 基于多核 DSP 的导控一体化弹载计算机设计[D]. 北京理工大学,2016.
[14] AGARWAL V,ARYA H,BHAKTAVATSALA S. Design and Development of a Real- Time DSP and FPGA-Based Integrated GPS-INS System for Compact and Low Power Applications[J]. IEEE Trans,2009,45(2):443-453. [15] Texas Instruments Incorporated. Floating Point Digital Signal processor,TMS320C6713 B,2006.
[16] Xilinx,Inc. Spartan-6 FPGA Data Sheet,XC6SLX150,2010.
[17] 徐文波,田耘。 Xilinx FPGA 开发实用教程[M]. 第 2 版。 北京:清华大学出版社, 2012.
[18] Texas Instruments Incorporated. Dual-output low-dropout voltage regulators with power up seguencing for split voltage DSP systems,TPS70345,2006.
[19] SPANSION. S29GL-P MirrorBIT FLASH Family,2005. [20] Integrated Silicon Solution Inc. 128Mb SYNCHRONOUS DRAM,IS42S32400F,2015
[21] Texas Instruments Incorporated.TMS320C6713B Hardware Designer's Resource Guide, 2004.
[22] 王大伟。 基于 DSP 和 FPGA 导航计算机硬件模块设计与实现[D]. 中北大学,2016.
[23] 三恒星科技。 TMS320C6713 DSP 原理与应用实例[M]. 北京:电子工业出版社, 2009.
[24] 罗广红。 基于 DSP/FPGA 的捷联导航计算机研究[D]. 哈尔滨工程大学,2012.
[25] Xilinx. Interfacing Xilinx FPGAs to TI DSP platforms using the EMIF[M]. USA: Xilinx,2007.
[26] Analog Devices,Inc. 8-/6-/4-Channel DAS with 16-Bit,Bipolar Input,Simultaneous Sampling ADC,AD7606,2010.
[27] Maurizio Di Paolo Emilio. Embedded Systems Design for High-Speed Data Acquisition and Control[M]. Springer,2015.
[28] Analog Devices,Inc. Signal and Power Isolated RS-485 Transceiver with ± 15 kV ESD Protection,ADM2582E,2009.
[29] 王俊超,王恒亮。 基于 FPGA 的参数可调 RS422 接口电路设计实现[J]. 电子科技, 2015,28(02):134-138.
[30] 陈云。 CAN 总线飞控计算机设计与开发[D]. 南京航空航天大学,2016.
[31] 王继国,吉吟东,孙新亚。 CAN 总线控制器 MCP2515 的原理及应用[J]. 电测与仪 表,2004(01):52-56.
[32] Microchip Conpration. Stand Alone CAN Controller with SPI Interface[M]. USA:Micro chip Conpration,2005.
[33] 王永云。 基于 FPGA 的多通道数据采集系统的设计[D]. 北华航天工业学院,2018.
[34] H Ren,HB Zhang,CL Zheng. Research of Multi-Channel Audio Data Acquisition System Based on FPGA and ARM[J]. Applied Mechanics &Materials,2014. [35] 张传民。 某弹载多通道数据采集系统的研究与设计[D]. 中北大学,2015.
[36] 李海洋。 基于 DSP 和 FPGA 的多功能嵌入式导航计算机系统设计[D]. 南京航空航 天大学,2005.
[37] 夏春杰。 基于 TMS320C6747 和 FPGA 的 GPS/SINS 组合导航系统研究[D]. 南京理 工大学,2013. [38] 姚君。 基于状态机方法的 CAN 总线通信的 FPGA 实现[J]. 国外电子测量技术, 2015,34(03):64-68.
[39] 王皓。 基于 DSP 和 FPGA 环境下的 CAN 总线实现[J]. 科技视界,2017(05):127-128. [40] CAD 辅助设计教育研究室。 AutoCAD 2016 电气设计从入门到精通[M]. 北京:人 民邮电出版社,2017.
[41] 何航峰。 以 DSP 为核心的弹载计算机系统的设计[D]. 南京航空航天大学,2013.
致 谢
不知不觉中,紧张而又充实的研究生学习生活就要结束了。在这两年半的时间里,老 师、同学、朋友等都给予了我很大的帮助。在论文完成之际,我向他们表达最诚挚的感谢。
首先,我要感谢我的校内导师曹白杨教授和校外导师樊贺斌老师。两位老师从论文的 选题、定题、设计认证到进度考核、论文写作等方面都给予了我很大的帮助。在校期间, 曹老师在学习上教会我如何学好专业知识,如何在实践中应用学到的知识;在生活上,也 教会了我很多东西,使自己得到进一步的提升;在单位实习时间,樊老师不仅在专业领域 方面对我进行指导,在生活上也给予我关心和照顾。在此,再次向两位老师表示忠心的感 谢!
其次,要感谢实习单位同事对我的帮助,特别是向我的师傅张洪倩表示感谢,在这一 年的实习工作中,师傅教会了我很多技术方面的知识,在毕设过程中给予我很大的帮助。 同时,也要感谢我的同学们和舍友们,在研究生期间对我的帮助、鼓励和支持,在论文写 作和修改方面给予我意见。
最后,再次向帮助我的老师、同学们表示由衷的感谢!
(如您需要查看本篇毕业设计全文,请您联系客服索取)