24Сʱ���Ķ�������
24Сʱ���Ķ�������
ժ Ҫ
������������ͧ�����Ŀ��ٷ�չ������ͧ�˻�����ϵͳ���ɻ�ȱ�����Ŀ�չ�˻��ڵ��Ӻ�ͼ����ͧ�˻�����ϵͳ����뿪��������ͨ��������Ӻ�ͼ��������� ͨ��ͼ�ں���������Ϣȱʧ�����⣬�Ӷ�ʹ����ͧ��þ�̬��֪�ĺ��Ϸ��գ�����������ͧ�İ�ȫ�ԡ�������Ҫ��Ϊ���·��棺
������1���������ͧ�˻�����ϵͳ�������Ʒ���������ͨ��������ϵͳ�Ĺ��ܼ��������������ϵͳ����ܹ�����ν�����ͧ�˻�����ϵͳ��Ϊ��������ģ�飻������ÿ��ģ����������ơ�
������2������ S-57 ��ͼ���ݱ�ʵ���˺�ͼ���ݵĶ�ȡ���������� GDAL/OGR��ȡ S-57 ��ͼ���ݵĻ����ϣ����к�ͼ����ƥ�䣻��δӲ��ұ��л�ȡƥ�䵽�ķ�������ָ����н���������ڻ��ƺ�ͼ���Ź����У�����ī����ͶӰ����ת������Ļ����ת������ɺ�ͼ���ŵĻ����е�����ת����
������3������ VS2017 ƽ̨������ C#�� WPF ������������ͧ�˻�����ϵͳ�Ŀ�����������ϵͳ�����������Զ���ؼ����������Լ���ʾ�������ϵͳ����Ŀ���������ں�̨���㣬������ؼ�����·���¼�����ɿ���������·��ͷ�����Ϣ�Ľ��������ͨ�� TCP/IP ��ͨ��Э�飬�����ͨ�ŵ����ӡ�ͨ������ͧʵ���º����ԣ���֤������ͧ�˻�����ϵͳ�Ŀ����ԡ�
�����ؼ��ʣ��˻�����������ϵͳ������ͧ�����Ӻ�ͼ

ABSTRACT
����With the rapid development of unmanned craft technology, the man-machine interaction system of unmanned craft is indispensable. In this paper, the design and development of man-machine interaction system of unmanned craft based on electronic chart are carried out. Through the introduction of electronic chart, the problem of information loss in the ocean area of ordinary map is solved, so that the unmanned ship can obtain the static known maritime risk, so as to improve the safety of the unmanned ship. The content is mainly pided into the following aspects:
����I. This paper presents a design scheme for man-machine interaction system of unmanned craft. Firstly, by analyzing the function and performance requirements of the system, the overall architecture of the system is designed. Secondly, the man-machine interaction system is pided into several functional modules. Finally, relevant design is completed for each module.
����II. The reading of chart data is realized based on s-57 chart data standard. Firstly, on the basis of reading s-57 chart data by GDAL/OGR, object object object matching is carried out. Secondly, the matching symbol description instruction is obtained from the lookup table and analyzed. Finally, in the process of drawing chart symbols, Mercator projection coordinate conversion and screen coordinate conversion are used to complete the coordinate conversion in the drawing of chart symbols.
����III. Based on VS2017 platform, the man-machine interaction system of unmanned vehicle was developed by using C# and WPF framework. First, add custom controls, buttons and display blocks on the system interface to complete the development of the system interface. Secondly,at the background logic layer, routing events are added to the interface controls to complete the issuing of control commands and the analysis of feedback information. Finally, through the TCP/IP communication protocol, the communication connection is completed. The feasibility of man-machine interaction system is verified by field test of unmanned craft.
����Keywords: Human Computer Interaction; Software System; USV; Electronic chart
Ŀ ¼
����1 ����
����1.1 ѡ�ⱳ��������
������������ͧ��Unmanned Surface Vehicle, USV�������Ŀ��ٷ�չ��Խ��Խ������ʼ��������ͧ������о�������ͧ�е�����Ҫ�ľ��������������2012��������Ӧ�ã����纣�����졢�ճ������Ѳ�ߵȷ��棨������ȣ�2006����
��������ͧ������Ҫ��ΪӲ����ͨ�ź������������֣��������ֶ�������ϵͳ���ɻ�ȱ�IJ��֡�Ӳ������Ϊ����ͧ�����Լ�����������ͧ�ϵ��豸��ͨ�Ų���Ϊ����ͧӲ�����ֺ���������֮����Ϣ�Ļ�ͨ���֣���������Ϊ����ͧ���˻���������ϵͳ���˻�������Human-Computer Interation, HCI����Ҫ��ͨ��һ����Ч�����������ֶ����������֮����ɸ�����Ϣ�Ľ������̡�Ŀǰ��������Ҫ���������豸���Դ�����صķ�ʽ����ɣ�ͨ��������Ļ������˻�����������ͧ���˻�����ϵͳҲʹ�õ㴥���صķ�ʽ����û��Ŀ��Ʋ�����Ȼ��ʵʱ��Ϣ�Ļش���ʾ�����Ϣ�������ں�̨����������ݵĴ�����Grudin et al.,2017����ͨ���������ֶ�����ͧ���и�������IJٿز���ʾ��Ϣ�ķ����������Ʋ�ʵ��һ�����Ի������ܻ�������ͧ�˻�����ϵͳ��������Ҫ�ġ�Ŀǰ��֪������ͧ�˻�����ϵͳ��Ҫ���Ǵ����ڴ��͵�ĸ������½���ϣ�ͨ�����ߵ�ͨ�ŷ�ʽ������ͧ���и���������Ϣ�Ľ�����
�������Ŀ�չ�˻��ڵ��Ӻ�ͼ������ͧ�˻�����ϵͳ����뿪����������������ͧ���˻�����ϵͳͨ��������ͧ��Զ�̲ٿأ���������ͧ�����ԣ����ϵͳ��ʾ������ͧ��̬��Ϣ�Լ��ش���Ϣ����������ͧ�������ԡ����Ϊ�˽����ͨ��ͼ�ں���������Ϣȱʧ�����⣬���Ӻ�ͼ��Ϊһ�������ַ�ʽ���������������ĵ�ͼ�������������岢ȷ�еĺ�����Ϣ������dz̲�������ߡ��ۿڡ�������������ˮ�����Ϣ���ܸ�ϵͳ�ṩ��Ϊȫ��ľ�̬��ͼ��Ϣ��ϵͳ������Ӻ�ͼ��Electionic Nautical/Navigation Chart, ENC��ʹ����ͧ�ܹ���þ�̬��֪�ĺ��Ϸ��գ���������ͧ����İ�ȫ�ԡ�
����ͨ������о����ݣ���������ƿ���ʵ�ֵ�����ͧ�˻�����ϵͳΪ����ͧ�ĸ���������������Ӧ��������֧�š�
����1.2 ������ݹ������о�
������չ�˻�����ϵͳ���������������еķ������棬���������ﴥ���������˻��ĵ������վ�����ܼҾӿ������ȣ�Wobbrock J O et al.,2016����ϵͳ��Ҫ��Ե����������֮����Ϣ�����Ĺ��̡�
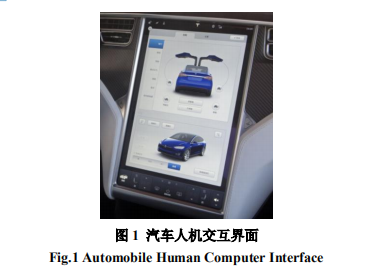
�������ϴ�ѧ��������ͨ�������������淢չ��״���˻�����������������пش������Ľ����Ӿ����棬�����˿��Կ��Ƴ����촰�����š������ȵȹ��ܣ��������ó����Ĵ��������Զ���Χ�ϰ�����б���������ϵͳ 2016 ������ò����ߵIJ������ܵõ���һ���������������ᣬ2017����ͼ 1 Ϊ�����п����ϵ��˻��������档
����Cavett D �����������˻���ʹ�ù����д�����֪���жϡ����ߺ�ս������ȷ���ľ����ԣ���������˻����˻��������棬�Ը��Ʋ�����Ա�����˻�֮��Ľ�����ͨ����ϵ������ MATLAB ��ͼ���û����湦�ܲ������ǹ���������Ƕ�뵽ͼ���û���������Ϊ���滷�����ý���ϵͳ�����ٲ���Ա����֪���������Ը��õ��˽��״����������˻�������Ч�ʣ�Cavett D,2007����
�����ڶ�ʮ���;�ʮ��������������˿Ƽ����̣�Robotek Engineering����˾�͵�������Third Hemisphere Interactive����˾���Ͽ�����"��˹��"��Roboski��USV. Roboski ��һ�ֿ�Զ��ң�ء��ͳɱ���ˮ��д���������������Ӧ���ڽ�������Կ�ѵ����ͨ��ң�� Roboski ���Խ��м��ҵĺ��϶Կ���ϰ�������˴���ֹ�������̶ֳȵ���ϰ����ˣ�Roboski ��Ŀǰ����ֱ������ˮ��ͧ������ϰ�ĵͳɱ����������¬��ˬ��2010����
����Fausto Ferreira ���������һ����ǿ����Ա������֮ͧ�佻���������˻�����ϵͳ��ͼ 2,ͨ����ϵͳ�����������ͧ������Ͷഫ���豸�������Ч�ԣ�Fausto Ferreira et al., 2012������������Ƶ��˻�����ϵͳ�������������ʵ�������д������㡣

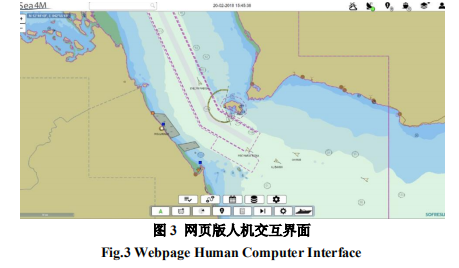
����2019 �꣬��������ѧԺ��Ʋ�ʵ����һ��������ҳ������ͧ����ϵͳ���û�ͨ����������ļ�����ϵ���ҳ���ӵ�ϵͳ����¼ҳ������û��ķ��ʣ����Ӻ����û����ݿ��м�����ɫ����¼��ϵͳ������ʾ����ͼ�ǵ��Ӻ�ͼ�ļ汾�������ֶ����ơ�����Ԥ��·�ߵȹ��ܣ����ǻ�����ҳ�ķ�ʽ��������ͧ�Ŀ����бȽϴ�IJ��ɿ��Ƶ���������ϵͳ�Ľ���������ͼ 3 ��ʾ��
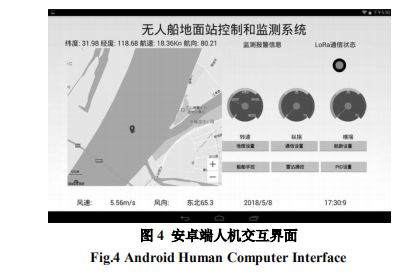
�������ٵ����ڰ�ƽ̨�Ϲ滮�˾���·�����á���ͼ��λ����ʾ�����ݻش��ȹ���ģ�������ͧ����վ���ƺͼ�ص�һ���˻�����ϵͳ��ͼ 4 Ϊ��ϵͳ�Ľ������棨���٣�2018�����˽���δ�ܽ��ؼ����ͼ���кܺõ��ںϣ���������Ҫ�ֶ���������ͧ������̬ʱ��û�и����û�һ�����õIJ������ܡ�
�������������������һ��Windowsϵͳ�ĵ��Ӻ�ͼ��ʾϵͳ��������ƿ�ܣ����� VB ���Ժ� Map Objects �ؼ�����ʵ�ֵ��Ӻ�ͼ��ʾϵͳ�ĸ��ֹ��ܣ���ʾ��ͼ����ͼ���ŵȵȣ���������2017����
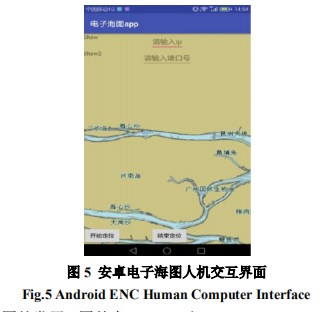
�������������IJ���֥�����һ����ƽ̨������ͧ���ϵͳ����ϵͳ�ܹ�ʵ�ֺ�ͼ��ʾ����ͼ��λ������ͨ�ŵȹ��ܣ����ڵ��Ӻ�ͼ����ʾ�����õ��Dz��ʽ���Ӻ�ͼ���뷽ʽ���˷�ʽ�ı����ں�ͼ�Ķ�ȡ�����ڲ���Ľ�������������������Ժ�ͼ���зֲ���ʾ��ͼ 5 �Ǹ�ϵͳ���˻��������棨����֥��2019����
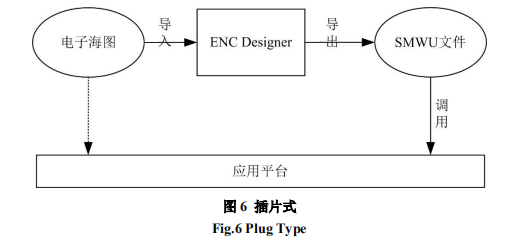
�����йص��Ӻ�ͼ�ķ�չ�������� ATLAS �� 7CS��OFFSHORE ��������˾���о����Ӻ�ͼϵͳ����������������չ�������������ҹ����й����¾�Ҳ��ʼ���Ӻ�ͼϵͳ������о���������ר�ŵĹ�˾��չ���Ӻ�ͼϵͳ�������������ȣ�����Ϊ�����о���ͼ��ϵͳ�ṩ��ͼ�����ӿڡ������ϴ����Ӻ�ͼϵͳ���Dz��õIJ�Ƭʽ�ķ�ʽ����ͼ 6 ��ʾ����Ƭʽ���ǽ����Ӻ�ͼ����һ����ͼ����ϵͳ����һ�����Ա�Ӧ��ƽ̨���õ��ļ���ʽ��ͼ�е� SMWU �ļ�Ϊ ENCDesigner ���������Ŀ�ʶ���ļ���
������������������ Android ƽ̨����Ʋ�ʵ����һ���ƶ����Ӻ�ͼϵͳ����ϵͳ�� S-57 ���ݽ��н�����ת������������ͶӰ������ת������ϵͳ�ڴ���������������ص�������й�����Ӧ��ǰ�������2013����
�����������߷�չ��״��Ҫ�������²��㣺��1������Ҫ�ֶ�����ʱ��û�и����û�һ�����õIJ������ܣ���2���˽���δ�ܽ��ؼ����ͼ���кܺõ��ںϣ���3���˻�����ϵͳ���������������ʵ�������д������㣻��4��������ҳ�ķ�ʽ��������ͧ�Ŀ����бȽϴ�IJ��ɿ��Ƶ���������5�������˲�Ƭʽ���Ӻ�ͼ���뷽ʽ��
����1.3 ���ĵ���Ҫ����
����������Ҫ���о�����Ϊ��Ʋ�ʵ�ֻ��ڵ��Ӻ�ͼ������ͧ�˻�����ϵͳ��ͨ���Խ��������ܷ���������˻��ڵ��Ӻ�ͼ������ͧ����ϵͳ��ϵͳ������Ҫ��Ϊ���·��棺
������1��������ͧ�˻�����ϵͳ�������Ʒ�����ͨ�������˻��������ܼ��������������ϵͳ����ܹ���������ͧ�˻�������Ϊ�������ģ�飺��ͼģ�顢�ٿ�ģ�顢���ݿ���ģ�顢ͨ��ģ�����Ƶģ�飬����ÿ��ģ���������Ӧ�Ĺ�����ơ�
������2��S-57 ���Ӻ�ͼ�Ķ�ȡ��ʾ����Ҫ��� S-57 ��������ͨ����ʼ�����S-52 �����ſ⣬Ȼ������ GDAL/OGR ��ȡ S-57 ��ͼ���ݵĻ����ϣ����к�ͼ����ƥ�䣻��δӲ��ұ��л�ȡƥ�䵽�ķ�������ָ����н���������ڻ��ƺ�ͼ���Ź����У�����ī����ͶӰ����ת������Ļ����ת�����Ӷ���ɺ�ͼ���ŵĻ��ơ�
������3������ͧ�˻�����ϵͳ��ʵ�֣��� Visual2017 ƽ̨��ʹ�� C#���Ժ� WPF������������ͧ�˻�����ϵͳ�Ŀ�����������ϵͳ�����������Զ���ؼ�����ť�Լ���ʾ�飬���ϵͳ����Ŀ���������ں�̨���㣬������ؼ�����·���¼�����ɿ���������·��ͷ�����Ϣ�Ľ����������� TCP/IP �����ӷ�ʽ�������ͨ�ŵ����ӡ�ͨ������ͧʵ���º����ԣ���֤������ͧ�˻�����ϵͳ����Ч�ԡ�
����1.4 �½ڰ���
���������Ľ��о����ݷ�Ϊ����½ڽ��н��ܣ�ÿһ�µļ�Ҫ�������£�
������ 1 �£����ۡ����Ƚ�����ѡ�ⱳ���Լ��������й��˻�����ϵͳ�ķ�չ�����������Ҫ�о����ݣ��Լ��½ڰ��š�
������ 2 �£�����ͧ�˻�����ϵͳ��Ʒ�������ϵͳ�Ĺ�������������������������ܹ�����������ϵͳ�Ĺ���ģ�顣
������ 3 �£����Ӻ�ͼ�����ݶ�ȡ�����Ƚ����˵��Ӻ�ͼ�� S-57 ������ν� �ܵ��Ӻ�ͼ��ȡ����ʾ�IJ������̣����а�����ͼ����ת����
������ 4 �£�����ͧ�˻�����ϵͳ������ģ���ʵ�֡����ν��ܵ�ͼģ�顢����ģ�顢�ؼ�ģ���ͨ��ģ���ĸ�����ģ���ʵ�ֹ��̡� �� 5 �£�����ͧ�˻�����ϵͳ������ԣ�������ͧ�˻�����ϵͳ���Զ��������ܽ��в��ԣ���֤ϵͳ��Ƶ���Ч�ԺͿɿ��ԡ�
������ 6 �£��ܽ���չ����
����2 ����ͧ�˻�����ϵͳ��Ʒ���
����2.1 �˻�����ϵͳ�������
����2.2 �˻�����ϵͳ���幹��
����2.2.1 ϵͳ��μܹ�
����2.2.2 ϵͳ���幦�ܼܹ�
����2.3 ϵͳ�������
����2.3.1 ��ͼģ��
����2.3.2 �ٿ�ģ��
����2.3.3 ���ݿ���
����2.3.4 ͨ��ģ��
����2.3.5 ��Ƶģ��
����2.4 ������
����3 ���Ӻ�ͼ�����ݶ�ȡ
����3.1 S-57 ���ݴ����
����3.2 ���Ӻ�ͼ��������
����3.2.1 ��ʼ�� S52 �����ſ�
����3.2.2 ��ȡ S-57 ��ͼ����
����3.2.3 ��ͼ����ƥ��
����3.2.4 ͨ������ָ����ʾ����
����3.3 ��ͼ����ת��
����3.4 ������
����4 ����ͧ�˻�����ϵͳ����ʵ��
����4.1 ��ͼģ��
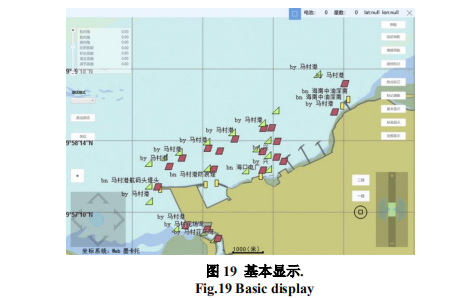
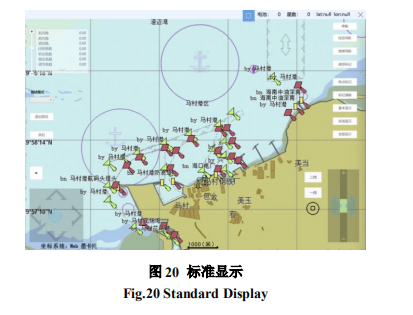
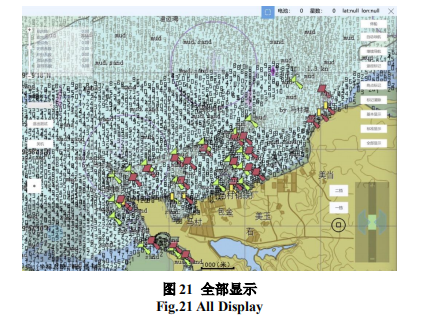
����4.1.1 ��ͼ�ֲ���ʾ
����4.1.2 ��ͼ����
����4.2 �ٿ�ģ��
����4.2.1 �ֶ�����
����4.2.2 �����·�
����4.3 ���ݿ��ӻ�
����4.4 ͨ��ģ��
����4.5 ������
����5 ϵͳ��������������
����5.1 �趨����ƻ�
����5.2 �趨���յ�
����5.3 ��ͼ������ģ
����5.4 ·���滮
����5.5 ����·���·�ָ��
����5.6 ������
����6 �ܽ���չ��
����6.1 �ܽ�
�����ں�������ͧ��չ����Ϊ�˽�һ����������ͧ����ϵͳ�Ľ������ܣ����Ŀ�չ������ͧ�˻�����ϵͳ������뿪����������Ե�ǰ��ͨƽ���ͼ�ں����������Ϣ�ȽϿհ����⣬ϵͳ�������ں������������Ϣ�Ƚ�ȫ��ĵ��Ӻ�ͼ��Ϊ��ͼ�ؼ������������ͧ�˻�����ϵͳ����ȷ������ͧ�ں�����Χ�ϰ�����������⣬������Ҫ��Ϊ���·��棺
������1����Ե�ǰ����ͧ���˻�����ϵͳ�ķ�չ��״��������ͧ�˻�����ϵͳ�������Ʒ�����ͨ�������˻��������ܼ��������������ϵͳ����ܹ���������ͧ�˻�������Ϊ�ĸ�����ģ�飺��ͼģ�顢�ٿ�ģ�顢���ݿ���ģ���ͨ��ģ�飬����ÿ��ģ������˹�����ơ�
������2������ S57 ��ͼ���ݱ�ʵ���˺�ͼ���ݵĶ�ȡ����ʾ����������GDAL/OGR ��ȡ S57 ��ͼ���ݵĻ����ϣ����к�ͼ����ƥ�䣻��δӲ��ұ��л�ȡƥ�䵽�ķ�������ָ����н���������ڻ��ƺ�ͼ���Ź����У�����ī����ͶӰ����ת������Ļ����ת�����Ӷ���ɺ�ͼ���ŵĻ��ơ�
������3���� Visual2017 ƽ̨��ʹ�� C#���Ժ� WPF ������������ͧ�˻�����ϵͳ�Ŀ�����������ϵͳ�����������Զ���ؼ�����ť�Լ���ʾ�飬���ϵͳ����Ŀ���������ں�̨���㣬������ؼ�����·���¼�����ɿ���������·��ͷ�����Ϣ�Ľ����������� TCP/IP �����ӷ�ʽ�������ͨ�ŵ����ӡ�ͨ������ͧʵ���º����ԣ���֤������ͧ�˻�����ϵͳ����Ч�ԡ�
����6.2 չ��
��������ͧ�˻�����ϵͳ���о������У�Ϊ�Ŷӽ�����������ͧ�˻�����ϵͳ���о��ϴ����˼�ʵ�Ļ���������ʱ����������ޣ���ϵͳ���������²��㣺
������1������ʱ���ϵ�����Ľ�ʵ������ƹ滮����Ҫ�������ܡ�
������2���Զ��������ܻ����ڲ��㣬����ֻ�ᵽȫ��·���滮����ʵʱ���й����У���Ҫ���Ǿ�̬�Ͷ�̬���ֺ����ϰ������ȫ����ֲ��㷨����о��Ǹ�ϵͳ��һ���о��ص㡣
������3��Ӧ��һ�������˻�����ϵͳ�Ĺ��ܣ�ʹ����ͧ�������ܸ���ȫ�滯��
���������
����[1] ����֥�� ����Android�����˴����ϵͳ���[D].����������ѧ��2019
����[2] ���֡� ��Դ����豸�Կ� S63/S57 ��ʽ���Ӻ�ͼӦ�÷����о�[J]. �������ӶԿ���2017��2����
����[3] �������� �콨���� �����磬�ȡ� �Ľ������·������ A*�㷨�ĸ�Чʵ��[J]. �����棬2004,024��005����20-22.
����[4] �ʳ����� ���� Windows CE ��Ƕ��ʽ���Ӻ�ͼ����ϵͳ�������ʵ��[D]. �人��ѧ��2005.
����[5] ���٣� �Ǵ��ף� �ų��� ���� Android �����˴�����վ���ƺͼ��ϵͳ���[J]. �ִ���Ϣ�Ƽ��� 2018, 2��0��9������P.177-178.
����[6] �����£� ���ϲӣ� ���㴺�� ���� S-57 ���Ӻ�ͼ��ʾ����Ϣϵͳ�����ƿ���[J]. ����������2004,000��003����24-26.
����[7] ���Ҹգ� ��壬 ���������ȡ� CDC �� S-57 ������Զ����о�[J]. �����棬2007,027��005����52-54.
����[8] ���������������ϲ�������壬�½��衣���� Android �ĵ��Ӻ�ͼ��ʾϵͳ�о���ʵ��[J].�������´�ѧѧ����2013,39��04����55-58.
����[9] ������� ��٣� �콨�����ȡ� ����IHO S-57���ĺ�ͼ���ݿ⽨��[J]. ������Ϣ��ѧѧ����2012,6��1����104-108.
����[10] ������� ˮ������ͧ��չ��Ӧ��[J]. ������ָ�ӿ��ƣ�2012,��06����205-209.
����[11] �������� �������� �й���ͼ���ŷ�չ�ص��о�[J]. ��湤�̣�2002��02����27-29.
����[12] �������� ��ͼ���ŵĻ��������չ���̼�����[J]. �����棬1998��01����50-52.
����[13] �ξ��� ˮ�ϻ����˾��������� ȫ���������ͧ"����һ��"[J]. ��������ҵ�� 2018,292��08����48-49.
����[14] �����ţ� �ű����� ˮ��������սϵͳ������չ����սӦ��[J]. ˮ������ϵͳѧ���� 2018.
����[15] ���棬 ���ϣ� �����£��ȡ� S-57 ���Ӻ�ͼ�Ŀ��ٶ�ȡ�����ӻ��洢[J]. ������ѧ������2014,36��7����108-112.
����[16] ���ƣ� ��Զ�ɡ� A*�㷨��ʸ����ͼ����·�������е�Ӧ��[J]. ��������棬2008,��04����259-263.
����[17] ¬��ˬ�� ˮ������ͧ·���滮�㷨�о�[D]. ���������̴�ѧ��2010.
����[18] ��Ӣ���� �캣���� �����ȡ� ���� S57 ���ںӴ�������ϵͳ�о�[J]. ����������2012,��03����39-42.
����[19] �����U�� �����£� �����ҡ� ���Ӻ�ͼ������Ⱦ��ʽ�о�[J]. ��ͨ��Ϣ�밲ȫ��2010,028��006����25-29.
����[20] ��ɭ�� ˮ������ͧ��ȫ��·���滮�����о�[D]. ���������̴�ѧ��2007.
����[21] �����顣 S-57 ��ʽ���Ӻ�ͼ���ݶ�ȡ�Լ��ֲ���ʾ[D]. �㶫��ҵ��ѧ��2011.
����[22] ��ӥ�� ������ˮ��ͧ�ľ���Ӧ�ÿ� �й���������ˮ��ͧ�ķ�չǰ��[J]. ����������2012��2����28-34.
����[23] �����ᡣ ���˼�ʻ�綯������ʻ���ڵ��˻������������[D].���ϴ�ѧ��2017
����[24] ��������������κ�Ρ����Ӻ�ͼ��ʾϵͳ�������ܵ��о���ʵ��[J].�����2017��04����23-26.
����[25] ��ᯣ� ��ƽ�� ��ɫ�п���"������"����ս������ˮ��ͧ[J]. ���ʵ���ս�� 2013.
����[26] �����͡� ˮ������ͧ����ƽ̨���[D]. �������´�ѧ��2013.
����[27] �����磬 ������ �����ܡ� ����ռ���������������������չչ��[J]. �й������о���2006,1��3����1-4.
����[28] ղ������ �ߺ����� ��ͼ���ſ�������ʵ��[J]. �����棬2001��1����33-37.
����[29] �������� �������� ���Կ⣬�ȡ� ���˴�ͧ�ķ�չ��չ��[J]. ���纣�ˣ� 2015,038��009����29-36.
����[30] ���� ��Զ�� Ҷ�ᡣ ���� S-57 ���ĵ��Ӻ�ͼ�������ʵ��[J]. �������ӹ��̣�2015,��2����94-98.
����[31] ׯ���� ���ڣ� �����ף��ȡ� ���ڵ��Ӻ�ͼ��ˮ������ͧȫ��·���滮�о�[J]. �������ѧ��2011,038��009����211-214,219.
����[32] Bo X, Ping X Y, Wei G, et al. Dual-Model Reverse CKF Algorithm in CooperativeNavigation for USV[J]. Mathematical Problems in Engineering,2014,2014:1-17.
����[33] Caccia M, Bibuli M, Bono R, et al. Basic navigation, guidance and control of an UnmannedSurface Vehicle[J]. Autonomous Robots,2008,25��4����349-365.
����[34] Castillo O, Neyoy H, Soria J. Dynamic fuzzy logic parameter tuning for ACO and itsapplication in the fuzzy logic control of an autonomous mobile robot[J]. International Journalof Advanced Robotic Systems,2013,383:1-10.
����[35] Cavett D , Coker M , Jimenez R , et al. Human-Computer Interface for Control of UnmannedAerial Vehicles[C]. IEEE Systems & Information Engineering Design Symposium. IEEE,2007.
����[36] Ceriotti M, Vasile M. MGA trajectory planning with an ACO-inspired algorithm[J]. ActalAstronautica,2011,67��9����1202-1217.
����[37] Fausto Ferreira, Marco Bibuli, Massimo Caccia, et al. Enhancing autonomous capabilitiesand human-robot interaction for Unmanned Surface Vehicles[C]. Control & Automation.IEEE, 2012.
����[38] Gigras Y, Gupta K. Ant colony based path planning algorithm for autonomous roboticvehicles[J]. Journal of Artificial Intelligence & Applications[J],2012,3��6����31-38.
����[39] Liu J , Chang W , Li J , et al. Design and Implementation of Human-Computer InteractionIntelligent System Based on Speech Control[J]. Computer Aided Design & Applications,2020, 17��S2����22-34.
����[40] Liu Y S. The robot path planning based on region partition to node optimization[J]. AdvancedMaterials Research,2011,38��3����605-609.
����[41] Subramanian A , Gong X , Riggins J N , et al. Shoreline Mapping using an Omni-directionalCamera for Autonomous Surface Vehicle Applications[C]. Oceans. IEEE Xplore, 2006.
����[42] Tuncer A, Yildirim M. Dynamic path planning of mobile robots with improved geneticalgorithm[J]. Computers & Electrical Engineering,2012,38��6����1564 -1572.
��л
����ʱ�����ۣ�������裬˶ʿ����������������˿���ѧϰ����Ŀ������æ µ���ʵ���������ҹ����������뿲��������������д����������˼�����ع�˶ʿ�������Щ�����ҡ������ҡ������ҵ��ˣ������г����˸м���
��������Ҫ��л�����ҵĵ�ʦ�μѽ��ڣ�������ѡ�ⶨ�д�����壬��ע������ʦ��������Ѫ�����Ұ��������ĵ�д������˳������������ĵ�д�������ҹ���˶ʿ�о����ڼ䣬��������������ʦ�Ĺ��ġ��������̵�����Ϊ��ʦ������ʦ���е����ң���ʦԨ����ѧʶ���Ͻ�����ѧ̬�ȡ���ߵľ�ҵ���ؽ�����δ���������켣����ָ����������á�Ȼ��Ҫ��л��������ʦ��������ʦ������ʦ�����ĵ�д�������У������ݵ���ʽ���ָ�����������ָ���뽨�飬����ʦ�����ķ����ϸ����������ļ���ָ������������ɵĹ����и������Һܴ��������л��λ��ʦ�����Ҳ�����Ŀ�Ļ��ᣬ�ڲ�����Ŀ�Ĺ�����ѧϰ�������࣬�����Ŷӵ��Ž�Э�������Թ����º����Եijɹ�����רҵ֪ʶ���ջ�������Ҳ���ܵ����Ŷӵ���ů�����ڴ˱�ʾ���ĵĸ�л����л��˶ʿ�ڼ���ҵİ�����
������λ�Ҫ��л�Ŷӵ�С���ͺ��Ѷ��ҵ����Ͱ�������л����ʦ�ֺ�С��ʦ����ѧϰ�����ж��ҵİ�����������������ѧϰ�������µķ�������ϸ�����̬�ȣ��������㷨��С���������飬���Ǹ��������������Ĺ��ĺ�ѧ���ϵ�֧�֣���л����ʦ��ͼ�ٻ��ʦ�����ͷ��������ǻ����ĵ������������飬���������˺ܶ���·����л�Ŷ�С��飬��������Ǯ��������������Ȼ��֣�������Լ�����С����Ǵ����Ŀ��ֺͰ����������ǹ�ͬ��Ŭ���£�Ӫ����һ���Žᡢ�������ϵ��Ŷ�ѧϰ��Χ����л���Ѵޱ���������������
�������Ҫ��л�ҵļ��ˣ�������������ĬĬ�ع��ĺ�֧�����ҡ���Ϊ���ǵĸ������Ҳ���û�к��֮�ǵ�ѧϰ�������������ѧ·�ϵļ�ǿ��ܣ�Ϊ�����ǽ��ѣ����Ƕ�����˽�Ĺ��ĺ��չ����Ҳ���ǰ���Ķ������һ����Ŭ������Ŀ��ǰ����
����˶ʿ�о��������ѧϰ����������������·����Ҫ��һվ����ʮ������������ң���лÿһ���������ҵ��ˣ�ϣ������ܷ�չ��Խ��Խ�ã�
��������Ҫ�鿴��ƪ��ҵ���ȫ�ģ�������ϵ�ͷ���ȡ��