24小时论文定制热线
24小时论文定制热线
摘 要
随着农业现代化建设的不断推进,果实收获已成为农业工程中非常重要的一环。
苹果作为民众生活中普遍需求的水果,其采摘的自动化程度显得尤为重要,故现已有大量的机器人被用于苹果采摘。但是目前苹果采摘机器人的采摘效率仍然还存在着一定的提升空间,这与其结构和运动规划方式密切相关。为此,文中针对苹果的生长环境,设计了一种四自由度采摘机械手结构,并对其进行采摘运动规划的研究。
首先,文中进行移动采摘机械手平台的软硬件设计。在硬件平台上,设计了移动底盘和机械臂,对采摘机械手视觉系统和主控系统的相应硬件进行选型,同时对车轮和关节的电机及其对应驱动器进行选型。在软件系统上,采用 Lab 颜色模型和霍夫梯度法进行目标的识别以及定位,运用 PID 算法结合光电编码器来实现伺服电机的速度闭环,并且编写了相应程序并测试,验证了上述方法的有效性。
其次,为了实现机械手的采摘,文中针对上述采摘机械手结构,运用末端关节分离法,确立了机械手的采摘位姿,并选择摆线运动方程作为机械手关节轨迹规划曲线。
再结合采摘姿态和关节运动学约束,推导了以采摘运行时间最短为目标的机械手最优运动规划数学模型。
然后,为了提高上述运动规划模型的求解性能,文中提出一种基于精英集聚效应的小世界优化算法。该算法在长连接中加入分级个体吸引策略,并根据节点优化效果对短连接中搜索次数及邻域大小进行自适应调整。通过对其进行收敛性分析和数值测试,验证了该算法的先进性。又通过采摘仿真测试,验证了该算法对此运动规划模型的优化效果。
最后,为了测试整个采摘机械手系统的有效性和稳定性,文中进行了采摘机械手平台样机实物实验。对苹果位于较高处、中远处、较低处三种情况进行采摘和运动规划实验,并将所提出的算法与禁忌遗传算法、基本小世界算法进行比较。实验结果表明,此采摘机械手模型、运动规划方式和算法均可靠和稳定。
关键词:苹果采摘;机械手;精英集聚效应;小世界现象;运动规划
Abstract
With the continuous advancement of agricultural modernization, fruit harvest has become a very important part of agricultural engineering. As a fruit that is commonly needed in people's lives, the degree of automation of picking is particularly important, so a large number of robots have been used for apple picking. However, there is still room for improvement in the picking efficiency of apple picking robots, which is closely related to its structure and motion planning. To this end, in this paper, a four-degree-of-freedom picking manipulator structure was designed for the growth environment of apple, and the research on picking motion planning was carried out.
First of all, the software and hardware design of the mobile picking robot platform is carried out. On the hardware platform, the mobile chassis and the mechanical arm are designed to select the corresponding hardware of the picking robot vision system and the main control system, and the wheels and joint motors and their corresponding drives are selected. On the software system, the Lab color model and the Hough gradient method are used to identify and locate the target. The PID algorithm is combined with the photoelectric encoder to realize the speed closure of the servo motor. The corresponding program is programmed and tested to verify the effectiveness of the above method.
Secondly, in order to realize the picking of the manipulator, the picking manipulator structure is used in the paper, and the end joint separation method is used to establish the picking posture of the manipulator, and the cycloidal motion equation is selected as the manipulator joint trajectory planning curve. Combined with the picking posture and joint kinematics constraints, the mathematical model of the optimal motion planning of the manipulator with the shortest picking time is proposed.
Then, in order to improve the performance of the above motion planning model, a small world optimization algorithm based on elite agglomeration effect is proposed. The algorithm adds a hierarchical inpidual attraction strategy to the long connection, and adaptively adjusts the number of searches and the size of the neighborhood in the short connection according to the node optimization effect. The convergence of the algorithm and numerical tests are carried out to verify the advancement of the algorithm. The simulation experiment is carried out to verify the optimization effect of the algorithm on the motion planning model.
Finally, in order to test the effectiveness and stability of the whole picking robot system, the physical experiment of the picking robot platform prototype was carried out. The picking and motion planning experiments were carried out on the apples at the higher, middle and lower elevations, and the proposed algorithm was compared with the tabu genetic algorithm and simple small world algorithm. The experimental results show that the picking manipulator model, motion planning method and algorithm are reliable and stable.
Keywords apple picking; robot; small world phenomena; elite gathering effect; motion planning
目 录
第1章 绪论
1.1 引言
本章主要讲述此课题的研究背景、发展现状、所涉及的技术趋势以及本课题的研究内容。文中首先阐述苹果采摘机械手的研究意义和发展现状,然后对目前采摘机械手研究的三大技术热点方向进行简要的介绍,最后针对上述技术热点所面临的一些难点,提出改进策略,并规划此课题的研究内容。
1.2 课题背景及意义
随着农业现代化进程的不断推进,以及机器人技术[1]的不断发展,在农业上,许多以前需要人工作业的任务现在都在被机器所逐渐取代,果实采摘[2]就是其中之一。
但是相比于其他环节,果实采摘在农业生产中较为复杂并且自动化程度较低[3].不过现在,许多农场都开始采用机器人进行相关的果实采摘,这类机器人称为采摘机器人[4-5].

果实采摘机器人根据预先设定好的任务指令,便可以自主移动识别目标[6],然后规划采摘轨迹[7],操控机械手完成采摘[8],随后移动到下一个目标,如此往复。虽然相对于人工采摘,机器人采摘灵巧度相对不足,短时间内采摘速度也不够快,但是不同于人工采集可能会出现工作人员长时间工作后体力不足以及出现情绪化而影响采摘效率。机器人可以保持这种稳定状态一直工作,在这点上人工采摘无法做到。尤其是在果实采摘的时节,大量的机器人帮助采摘果实的话可以显著提高果实采摘效率,而且还能提高经济收益。尽管现在果实采摘机器人由于经济成本和技术成熟度不够还未大规模应用于市场,但是在未来,这种人力成本、作业稳定且效率高的设备定会得到广泛的应用。
苹果作为大众需求量较多的果实,其采摘自动化程度对人们的生活有着重要的影响。目前,已有许多果园采用机器人进行苹果的采摘,并且采摘效果较为良好,可以应付大规模的苹果采摘任务。正是由于苹果采摘机器人需求量大,且面对不同的采摘环境需要机器人的种类也不同,故对苹果采摘机器人的研究一直是许多学者和工程师所关注的的问题,其具有很高的应用价值。
本课题获得国家重点研发计划"智能农机装备"重点专项(课题编号:2016YFD0700903)的支持。
1.3 采摘机械手研究现状
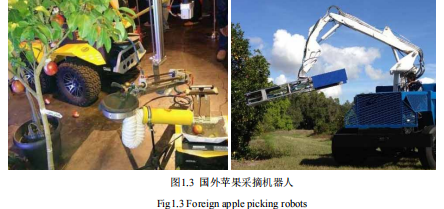
采摘机器人在国外的研究历史已经研究超过了 50 年[9].在此之间国外的学者和公司设计出了许多采摘机器人原型。1996 年,荷兰农业环境工程研究所研制了一种在温室中进行的多功能黄瓜收获机器人[10],其自动化程度较高,无需人工干预就能在温室工作。日本曾研制了番茄采摘机器人[11],此机器人最大的特点是其通过双目视觉识别并定位果实,并且可以对遮挡的果实进行识别和定位。西班牙工业自动化研究所开发了一款柑橘采摘机器人[12],其提供了一种人机协作的概念,这也对以后机器人系统设计开辟了一种新的思路。
对于苹果采摘机器人,国外也已经进行了比较详尽的研究。有针对苹果采摘的结构做研究[13],优化了其工作空间,可以在所需条件下在定位其工作空间内超过 90%的果实。有针对多个苹果采摘进行了基于视觉的任务规划的研究[14],其可以规划在较短的时间完成多个果实采摘的方式,同样也取得了较好的效果。
国内采摘机器人研究虽然起步较晚[15],但是也已经取得相当大的进展。在苹果采摘机器人方面,赵德安[16]等对苹果采摘机器人做了充分的研究,设计了一种具有五自由度机械手本体和升降两自由度移动平台两部分的采摘机器人。孙贤刚等[17]设计了一种基于视觉的苹果采摘机器人系统,其对机器人的软硬件进行了系统地设计并特别针对苹果的识别和定位技术作了深入的研究。

1.4 苹果采摘机器人研究趋势
苹果采摘机器人发展至今,技术已相对成熟。但是仍有一些问题等待科研人员和工程师们去解决。这其中就包括更加先进的机械手结构、更加高效的采摘方式和更加精确的目标检测方法。而这些问题主要集中在结构设计、运动规划以及机器视觉这三大研究方向上。
1.4.1 结构设计
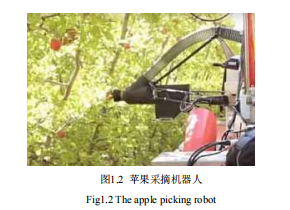
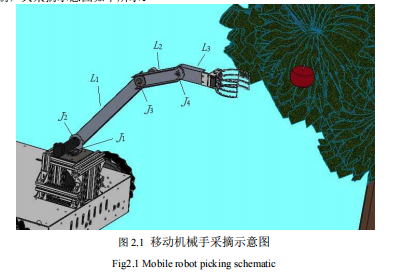
苹果采摘机器人的结构一般分为机械臂、末端夹持机构和移动底盘三部分。下图即为一般苹果采摘机器人示例[18],除去图中的电气元件,其机械结构即为上述三部分,无论是研究所设计的还是农场所应用的大都为这种结构。
首先,机械臂是采摘机器人中最为主要也是最为复杂的结构部分。一般采摘机器人采用的是垂直关节串联机械手臂。这种手臂结构模拟了人类的手臂功能,由垂直于地面的腰部旋转轴带动小臂旋转的肘部旋转轴以及小臂前端的手腕等构成。其优点是可以自由地实现三维空间的各种姿势,可以生成各种复杂形状的轨迹,适合苹果采摘这种要求机械手末端有较大范围的移动的情况。串联机械臂的关节数决定了其自由度,一般在笛卡尔空间机械手末端最多具备六个自由度,分别代表工作空间中即沿三个方向平移和绕三个方向旋转。但是目前在许多果实采摘环境中无需用到六个自由度,这样不仅会增加机械手的制造成本,同时连同机械手驱动系统的制造成本同样也会提高。
故许多苹果采摘机器人采用了 4 自由度[19]或者 5 自由度[20]机械臂结构,其可以在完成采摘的同时一定程度上节约成本。
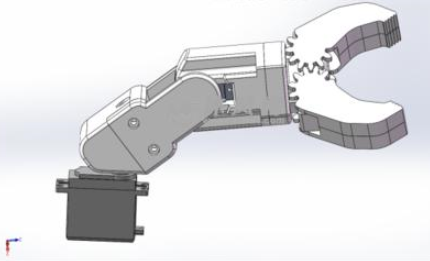
其次采摘机器人的末端结构也是相当重要,其决定苹果是否可以被成功采摘下来。
在苹果采摘机械手末端执行器设计上,一般选用夹持[21]的结构,对于苹果采摘来说,夹持机构结构紧凑,通用性强,且对苹果形变敏感,这些特性可以较好地保证末端在抓住苹果的同时避免破坏果实。
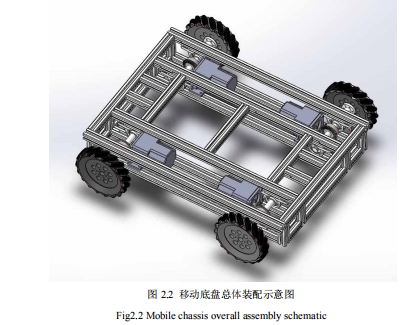
另外由于苹果采摘环境的地面一般为泥地,行走条件较为恶劣,故移动采摘机械手底盘基本为双履带轮结构[22].履带轮结构将底盘一边的所有车轮用履带连接起来,提高底盘与地面的接触面积,从而在一些有坡度的采摘环境下亦可以实现较为自由的移动。但是这种履带轮行走机构,依然是采用两轮差速运动模型,其转弯半径较大,运动方向调整能力较差,在一些空间较为狭小的苹果采摘环境中就显得力不从心。
1.4.2 运动规划
对于机械手各个关节的运动规划[23]一直是机器人技术的一个重点,苹果采摘机器人也不例外。对于串联机械臂运动来说通常都是已知目标位姿反求运动轨迹,故所要求的都是运动学逆解。而机械臂末端运动轨迹和各个关节角相关,所以求得逆解也就是机械手各个关节角的增量。因为机械臂运动学逆解方程组是非线性的,故逆解的计算量很大,而且冗余解较多,有时可能还会出现无解的情况,既要保证机械手运动总时间最短,又要尽量让机械手运动总能量消耗最少,所以在这些性能指标下如何确定最优逆解[24]一直是机械手轨迹规划的一个难点。而且由于机械手自身特性,在运动过程中必须要平稳。所以在进行机械手运动的过程中,还需要对机械手各个关节角的位移、速度、加速度做规划,保证机械手末端能平稳准确的到达目标。这一系列的运动轨迹优化,都是现在机器人研究者所重点关注的。
针对机械手逆解计算困难,很多学者进行了研究,其中较为经典的要数多项式插值法[25].它根据插值多项式的极小点逼近寻求函数的极小点,运用近似的方法重复进行迭代计算,直到得出满足事先给出的精度要求的解为止。这种数值解法虽然相较于解析解没那么精确,但是建立数学模型简单,计算量也相对较小,契合一般的苹果采摘机械臂运动方式。目前采摘机械手运动规划大多数采用的是三次多项式插值[26],初始机械臂初始位置关节角度、角速度和终止位置关节角度、角速度作为插值多项式的四个系数来确定这个三次多项式,然后通过建立关于速度加速度微分方程便可以求出关节角的位移、速度和加速度。而在一些采摘情况较为复杂,要求较为严格的情况下,可能机械手在路径点的速度不再一直为零。故需要推广插值多项式为任意约束速度的模型,将机械手各个关节初始和终止角加速也添加到多项式系数,从而变成五阶插值多项式[27].
但是,通过传统的多项式插值方式来应对机械手苹果采摘这种较为复杂环境下的轨迹规划性能依然较低,无法在高阶动态的约束下求最优解。这时,群体智能算法开始在机械手轨迹规划求解中流行起来。诸如遗传算法、粒子群算法等都已经在机械手轨迹规划上有成熟的应用,苹果采摘机械手也不例外。陈天宏等[28]利用遗传算法对苹果采摘机器人运动到各个路径点进行运动轨迹规划,结果表明其运行总路径较短、运动平滑。黄轶文[29]等将蚁群算法应用到苹果采摘机械手运动规划中,其在具备了路径较短、运动平滑优点的同时,还具有很高的可靠性和稳定性。Bing 等[30]提出一种结合粒子群优化算法的采摘机械手运动规划方式,其可以在不同规划模式下减少关节角扰动,提高运动精度。可以看出,智能算法对机器人轨迹规划具有通用性,而且可以实现组合最优解,故在机械手苹果采摘运动规划中应用这类算法非常合适。
1.4.3 机器视觉
随着机器视觉[31]的不断发展,不止工业上运用机器视觉进行目标的识别和定位,在水果采摘上也被广泛地应用。机器视觉为非接触式测量,由于其包含的信息量较大,并且对于非结构化的作业环境较为友好,故用机器视觉作为苹果的识别和定位方式非常适合。
王丹丹等[32]设计了一种苹果采摘系统,其主要通过双目立体视觉和图像匹配进行果实的识别和定位,取得了较好的效果。但是不同于工业环境,苹果采摘由于大都在室外,光线的强弱、背景颜色以环境遮挡等因素对苹果的识别影响较大,故如何在自然环境中进行苹果的准确识别和定位是学者们研究较多的地方。赵德安等[33]运用深度学习的方式对各种光照环境下的苹果进行离线特征训练,并建立知识库,将其运用到苹果实时采摘中,较为显著地提升了视觉系统的苹果识别能力。张宾等[34]运用高清相机进行图像采集,然后运用激光测距法对苹果进行定位,其研究结果表明在此视觉系统下苹果识别的精度和抗干扰能力都得到了显著的提升。
另外,已有学者不仅将视觉用于苹果的识别和定位,更将其添加到机械手运动闭环控制中,其称为视觉伺服[35].机器人视觉伺服系统是机器视觉和机械臂运动控制相结合的闭环系统。先由图像传感器采集环境信息,然后经过图像处理提取目标以及机械手末端等相关信息,再由控制器根据输入信息规划机械臂关节角运动参数,向电机驱动发出相关指令从而控制机械臂运动,这个过程中,图像传感器会不断的向控制器发送实时的图像特征信息,控制器也会根据此信息作为反馈实时调整关节角运动参数以控制机械手末端到达指定目标。这种运动伺服方式具有较强灵活性和实时性,将会是未来苹果采摘机械手研究的热点之一。
1.5 论文章节内容安排
为了能够节约采摘机械手制造成本、减少计算复杂度以提高机械手的采摘效率。
文中以苹果采摘研究对象,设计了一种四自由度的机械手结构,然后对其进行硬件选型及加工制作,接着完成其图像处理和电机控制系统的软件设计。基于这种机械手结构,推导了一种以机械手采摘时间最短为目标的运动规划模型,并提出一种基于精英集聚效应的小世界优化算法来求解此模型,以验证其有效性。各章节的主要内容安排如下:第一章为的绪论部分,主要讲述采摘机械手的研究背景和发展现状,然后针对采摘机械手主要研究方向和关键技术重点,包括结构设计、运动规划以及视觉伺服。
第二章为采摘机械手综合设计部分。分为机械手平台设计和对应软件设计。其中机械手平台设计包括总体结构设计及加工、关节驱动电机和核心电子硬件选型以及最终平台的总体装配集成。软件设计则包括采摘目标识别定位系统和电机控制系统。
第三章为采摘机械手运动学分析及优化模型推导部分。首先用机械手运动学理论分析此四自由度机械手的运动方式和正逆解的获取,然后进一步推导其在特定环境下采摘位姿的确立方式,最后结合摆线运动方程得出一种以运动时间最短为目标的采摘运动规划模型。
第四章为采摘机械手最优运动规划求解部分。首先介绍群体智能优化小世界优化算法的原理,然后提出一种精英集聚效应的小世界优化算法,并对其应用 Markov 链进行收敛性证明。随后进行算法的 TSP 数值性能测试实验,并针对三种采摘位置进行采摘仿真测试。
第五章为采摘机械手实验部分。针对目标位于较低、中远、较高三种位置情况分别进行仰摘、平摘、俯摘的实验测试,以验证该结构、运动规划模型以及优化算法的有效性。
第六章是文章的总结与展望部分。

第 2 章 移动苹果采摘机械手样机设计与平台搭建
2.1 引言
2.2 移动采摘机械手结构设计与制作
2.2.1 整体结构设计
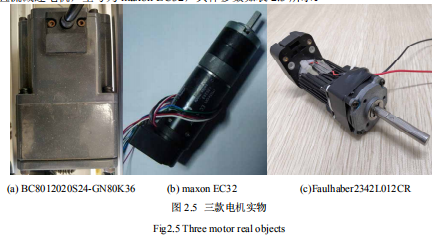
2.2.2 伺服电机选型
2.2.3 系统硬件选型
2.2.4 样机制作与装配
2.3 采摘机械手视觉检测系统设计
2.3.1 目标视觉识别与定位原理
2.3.2 视觉处理程序设计和测试
2.4 采摘机械手电机控制系统设计
2.4.1 闭环电机控制原理
2.4.2 伺服电机闭环控制程序设计和测试
2.5 本章小结
第 3 章 采摘机械手运动学及运动规划模型
3.1 引言
3.2 采摘机械手空间运动学
3.2.1 采摘机械手运动学正解
3.2.2 采摘机械手运动学逆解
3.2.3 采摘机械手运动学仿真测试
3.3 采摘机械手关节空间轨迹规划
3.3.1 三次多项式插值
3.3.2 两端抛物线插值
3.3.3 摆线运动
3.3.4 关节轨迹规划函数的对比与选取
3.4 采摘机械手最优运动规划模型
3.4.1 确立采摘位姿
3.4.2 关节运动学约束
3.4.3 最优运动规划模型
3.5 本章小结
第 4 章 采摘机械手最优运动规划求解研究
4.1 引言
4.2 群体智能优化算法
4.2.1 禁忌遗传算法
4.2.2 基本小世界优化算法
4.3 基于精英集聚效应的小世界优化算法
4.3.1 算法的一些定义
4.3.2 算法的基本步骤
4.4 算法的收敛性能分析
4.5 算法的数值测试与讨论
4.5.1 TSP 数值测试
4.5.2 算法参数测试
4.6 算法用于采摘运动规划模型的仿真测试
4.7 本章小结
第 5 章 采摘机械手运动规划综合实验
5.1 引言
5.2 实验准备
5.3 目标采摘及运动规划实验
5.3.1 较高处目标采摘运动规划及采摘过程
5.3.2 中远处目标采摘运动规划及采摘过程
5.3.3 较低处目标采摘运动规划及采摘过程
5.4 本章小结
第6章 总结与展望
6.1 总结
随着农业现代化进程的不断加快,在未来,机器换人在农业工程上将会更加普及。
水果采摘由于人工劳动力需求量大故急需大规模地被机器人所替代。采摘机器人自动化程度高,且作业较为稳定,可以应对大规模的采摘任务,极具应用前景。本文正是基于此背景,同时考虑到采摘机械手结构和成本等因素,针对苹果采摘环境,设计一种四自由度移动采摘机械手,并完成其样机平台的搭建。同时考虑到采摘效率的问题,故针对此结构推导出一种以运动时间最短为目标的采摘运动规划模型。为求解此模型,提出一种基于精英集聚效应的小世界优化算法,并通过仿真测试和实物实验,验证了该算法的优异性能,同时也证明了该运动规划模型的有效性。现对文中主要进行的研究工作总结如下:
(1) 针对苹果生长环境普遍下方无遮挡,简化传统六自由度机械手结构,舍弃小臂回转和末端回转两个自由度,设计一种四自由度采摘机械手结构,并完成其实物的制作。
(2) 对电机、驱动器、视觉模块、控制模块等进行选型,编写目标识别定位以及电机闭环控制的程序,完成采摘机械手样机平台的搭建。
(3) 针对此机械手结构,运用末端分离法简化了其采摘运动姿态的确立,并结合摆线运动方程,建立了一种基于时间最优的采摘机械手运动规划模型,其参数较少,处理简便。
(4) 为了提高机械手采摘苹果的效率,提出一种基于精英集聚效应的小世界优化算法,并用 Markov 链理论分析其收敛性能。然后用 TSP 数值测试验证其性能的优异,最后将其应用到采摘运动规划模型中,验证模型以及算法的有效性。
(5) 将算法移植到单片机中,搭建实物实验测试环境,通过对高处、中远处、低处三类共 12 个目标位置的运动规划以及采摘实验,验证了该设计的结构可用于这一类果实不同位置的采摘要求,以及通过该运动规划模型和所提出算法的优化,可以提高机械手采摘的效率。
6.2 展望
随着研究的进行,虽然文中苹果采摘机械手的结构有效,并且其采摘的效率得到了一定的提高,但是其中仍然暴露出许多问题和需要继续探究的地方。主要包括以下几个方面:
(1) 由于采摘机械手平台是自己设计并购买材料制作,故在打孔、装配、固定等地方都出现了一定的偏差,以至于在实验时,采摘的效果并不是十分的理想,许多次采摘完成的都稍许有些勉强。所以需要提高制作加工的精度或者设计一种方法来补偿这些偏差。可以考虑采用数字加工的方式进行高精度的定位钻孔和装配,也可以建立一种包含打滑误差在内的机械手关节控制模型,但是这对于电机驱动器的计算要求较高,完成的难度较大。
(2) 现研究的采摘机械手运动规划都是在无障碍物的前提下进行,在实际采摘中,肯定会有遮挡的出现。这可能是在果实识别时出现遮挡导致果实特征在图像中并不完整,影响其识别和定位;亦或是在采摘的运动路径中存在实物的阻碍,导致采摘无法完成。但是由于嵌入式系统的性能有限,面对这些复杂的情况无法进行快速处理响应,故可以采用一种分布式机械手采摘运动规划计算方式。即多台机械手公用一台 PC 机,在 PC 上进行较为复杂的不完整果实图像识别和机械手避障规划算法的编写,并且 PC机和机械手嵌入式控制器之间采用无线通信。在一般情况下嵌入控制器正常全权负责机械手采摘处理和规划,若出现上述较为复杂的情况时,将规划模式切换至分布式,先将检测到的的数据传至 PC 机,待处理后返回机械手的运动规划参数。如此既可以完成复杂情况下的采摘,又可以相对地节约成本。
(3) 本次研究只针对单个苹果的采摘运动规划,在实际采摘过程中需要连续采摘多个苹果,如何使得机械手在采摘多个果实时总运行时间短也是需要解决的问题。目前可行方案主要有的两种。一种是先在 PC 机上运用群体智能优化算法对果实进行采摘顺序规划,然后再在嵌入式机械手平台上进行单个果实的运动规划,这种方式较为灵活,但不一定是组合最优。另一种是直接建立多个果实目标采摘时间最短的关节运动规划模型,然后一步规划出机械手对多个苹果采摘各个关节的运动轨迹,这种方法可以较好地获得组合最优规划方式,但是其耦合性较强,只要机械手运动过程出现偏差则整个采摘就会失败。所以需要根据不同的情况选择较好的全局运动规划方式。
参考文献
[1] Garcia E , Jimenez M A , De Santos P G , et al. The evolution of robotics research[J].IEEE Robotics & Automation Magazine, 2007, 14(1):90-103.
[2] Li J, Karkee M, Zhang Q, Xiao K H, et al. Characterizing apple picking patterns forrobotic harvesting[J]. Computers and Electronics in Agriculture,2016, 127:633-640.
[3] 吴莉丽,薛益。农业机械自动化技术研究[J].电子世界,2018,(18):154.
[4] 宋健, 张铁中, 徐丽明,等。 果蔬采摘机器人研究进展与展望[J]. 农业机械学报,2006, 37(5):158-162.
[5] 崔玉洁, 张祖立, 白晓虎。 采摘机器人的研究进展与现状分析[J]. 农机化研究,2007(2):4-7.
[6] 司永胜, 乔军, 刘刚,等。 苹果采摘机器人果实识别与定位方法[J]. 农业机械学报,2010, 41(9):148-153.
[7] 黄轶文,张梅。基于蚁群算法的六自由度采摘机器人轨迹规划研究[J].农机化研究,2017,39(3):242-246.
[8] 姜秀玲 . 基 于 PLC 的苹果采摘机械手运动控制系统设计 [J]. 农机化研究,2017,39(11):203-207.
[9] Harrell R C , Adsit P D , Pool T A , et al. The Florida Robotic Grove-Lab[J]. Trans of theAsae, 1988, 33(2):391-399.
[10] Ejvan H, Bajvan T, Hemming J, et al. Field test of an autonomous cucumber pickingrobot.[J]. Biosystems Engineering, 2003, 86(3):305-313.
[11] Aloisio C, Kumar M R, Chang C Y, et al. Robotic mass removal of citrus fruit[J]. ActaHorticulturae, 2012, 36(965):201-208.
[12] Pholsiri C , Kapoor C , Tesar D . Manipulator task-based performance optimization[J].
American Society of Mechanical Engineers,2004,1:1993-1201.
[13] Wei L I, Ji L I, Zhang J X, et al. Optimization design and simulations of theapple-picking-robot arm[J]. Journal of Beijing University of Technology, 2009,35(6):721-726.
[14] Wang H. Identification and location system of multi-operation apple robot based onvision combination[J]. Transactions of the Chinese Society for Agricultural Machinery,2012, 43(12):165-170.
[15] Li B , Vigneault, Clément, Wang N . Research development of fruit and vegetableharvesting robots in China[J]. Stewart Postharvest Review, 2010, 6(3):1-8.
[16] Guo J, Zhao D A, Wei J, et al. Design and control of the open apple-picking-robotmanipulator[C]// IEEE International Conference on Computer Science & InformationTechnology. 2010.
[17] 孙贤刚,伍锡如,党选举, 等。基于视觉检测的苹果采摘机器人系统设计与实现[J].农机化研究,2016,(9):151-155.
[18] 张战杰 . 基于直流电机驱动电路的移动式采摘机器人设计 [J]. 农机化研究,2019,41(4):242-245,263.
[19] 贺橙林 , 施光林 . 一种基于机器视觉的苹果采摘机器人 [J]. 机电一体化,2015,21(4):3-7,22.
[20] Wang Y M. Application for the general kinematics of 5DOF picking robotmanipulator[J]. Journal of Anhui Agricultural Sciences, 2012.,2012,40(3):1757-1759.
[21] 孟彩茹,张高青,李夏楠, 等。夹持机械手爪机构的设计与优化[J].机械设计与制造,2016,(6):70-74.
[22] Kim Y G, Kwak J H, Hong D H, et al. Autonomous terrain adaptation and user-friendlytele-operation of wheel-track hybrid mobile robot[J]. International Journal of PrecisionEngineering & Manufacturing, 2012, 13(10):1781-1788.
[23] Lumelsky V J. Dynamic path planning for a planar articulated robot arm movingamidst unknown obstacles [J]. Automatica, 1987, 23(5):551-570.
[24] 张毅,刘芳君,胡磊。结合 MPGA-RBFNN 的一般机器人逆运动学求解[J].智能系统学报,2019,14(1):165-170.
[25] DeBoor C, Ron A. On multivariate polynomial interpolation[J]. ConstructiveApproximation, 1990, 6(3):287-302.
[26] Lu J Y, Yang Q H, Gao F, et al. Trajectory planning of a five DOF agricultural pickingrobot[J]. Journal of Mechanical & Electrical Engineering, 2010.
[27] 司艳伟。基于 5 次 B 样条函数的果蔬采摘机器人轨迹规划的研究[D].浙江:浙江理工大学,2017.
[28] 陈天宏,崔天时,李广军。基于遗传算法的采摘机器人轨迹规划[J].农机化研究,2010,32(8):31-34.
[29] 黄轶文,张梅。基于蚁群算法的六自由度采摘机器人轨迹规划研究[J].农机化研究,2017,39(3):242-246.
[30] Bing Z, Yang W, Hang L. Design of wireless communication system for picking robotbased on LTE-advanced and particle Swarm optimization[J]. Journal of AgriculturalMechanization Research, 2018,40(3):198-202.
[31] Wildes R P, Asmuth J C, Green G L, et al. A machine-vision system for irisrecognition[J]. Machine Vision & Applications, 1996, 9(1):1-8.
[32] 王丹丹,宋怀波,何东健。苹果采摘机器人视觉系统研究进展[J].农业工程学报,2017,33(10):59-69.
[33] 赵德安,吴任迪,刘晓洋, 等。基于 YOLO 深度卷积神经网络的复杂背景下机器人采摘苹果定位[J].农业工程学报,2019,35(3):164-173.
[34] 张宾,宿敬肖,张微微, 等。基于激光视觉的智能识别苹果采摘机器人设计[J].农机化研究,2016,38(7):60-64.
[35] Zhang Y, Tan K K, Huang S. Vision-servo system for automated cell injection[J]. IEEETransactions on Industrial Electronics, 2009, 56(1):231-238.
[36] 刘健庄, 栗文青。 灰度图象的二维 Otsu 自动阈值分割法[J]. 自动化学报, 1993,19(1):101-105.
[37] 张宏建。 Lab 色彩模式在图像处理中的应用[J]. 福建电脑, 2011, 27(1):146-147.
[38] 孙丰荣, 刘积仁。 快速霍夫变换算法[J]. 计算机学报, 2001, 24(10):1102-1109.
[39] 汪雨冰,王睿,于永江, 等。高精度增量式光电编码器信号处理系统[J].吉林大学学报(信息科学版),2018,36(4):398-402.
[40] Ang K H, Chong G, Yun L. PID control system analysis, design, and technology[J].
IEEE Transactions on Control Systems Technology, 2005, 13(4):559-576.
[41] 马贵飞,马履中,杨文亮。苹果采摘机器人机械手运动学分析与仿真[J].农机化研究,2010,32(07):21-25.
[42] 程适,王锐,伍国华, 等。群体智能优化算法[J].郑州大学学报(工学版),2018,39(6):
前插 1-前插 2,1-2.
[43] Maulik U, Bandyopadhyay S. Genetic algorithm-based clustering technique[J]. PatternRecognition, 2000, 33(9):1455-1465.
[44] 赵静,孔金生。基于遗传算法和禁忌搜索的混合优化策略[J].计算机工程与设计,2009,30(23):5489-5491.
[45] Tang Y, Qian F, Gao H J, et al. Synchronization in complex networks and itsapplication – A survey of recent advances and challenges[J]. Annual Reviews inControl, 2014, 38(2): 184- 198.
[46] Yaozu Cui, Xingyuan Wang. Detecting one-mode communities in bipartite networks bybipartite clustering triangular[J]. Physica A: Statistical Mechanics and itsApplications,2016,457:307-315.
[47] Zhu Q, Zhu Z L, Qi Y, et al. Optimization of cascading failure on complex networkbased on NNIA[J]. Physica A: Statistical Mechanics and its Applications, 2018,501:42-51.
[48] McGarry K, McDonald S. Complex network theory for the identification andassessment of candidate protein targets[J]. Computers in Biology and Medicine,2018,97:113-123.
[49] Watts D J, Strogatz S H. Collective dynamics of 'small-world' networks.[J]. Nature,1998, 393(6684):440.
[50] 杜海峰, 庄建, 张进华等。 用于函数优化的小世界优化算法[J]. 西安交通大学学报,2005, 39(9): 1011?1015.
[51] Kleinbe RG J M .Navigation in a small world [ J] .Nature , 2000 , 406(8):845 .
[52] Yuan M X, Cheng S, Jiang Y F, et al. A novel self-tuningproportional–integral–derivative controller based on a radial basis function network fortrajectory tracking of service robots [J]. Journal of Systems and Control Engineering,2014, 228(3): 167-181.
[53] Alexander G N, Sheldon H J. Using Markov chains to analyze the effectiveness of localsearch algorithms [J]. Discrete Optimization, 2010, 8(2):160-17.
致 谢
转眼之间,三年的硕士研究生生活即将过去,自己也由一个在科研上几乎一窍不通的纯新手变为能够完成硕士研究工作的科研入门者。这里要特别感谢自己的硕士生导师袁明新副教授,从硕士论文的选题,大方向的指导以及论文的详细修改,都倾注了他大量的心血。他不仅在学术上给予自己详细的指导,更是教会了我如何成为一名合格的科研工作者。他一遍遍地用行动告诉我做任何事情是没有捷径可寻的,必须要吃苦才能有收获。并且他对于学术那种一丝不苟、寻根究底的态度也影响了我,并改变了我,让我养成了严谨踏实的做事习惯。这对我以后的事业和生活都有着积极而又重要的影响。
自己还要感谢在研究院的师兄和同学们。在他们的指引下我踏入了机器人领域,从而开拓了我的视野,也让我领略了学科高处的风景,一并感谢他们。在此着重感谢研究院对自己的课题"移动苹果采摘机械手设计及其运动规划"的全力支持。没有研究院提供的资金以及实验平台,自己很难完成这项课题。
同时,自己要感谢在三年来一直支持和帮助自己的家人和朋友,他们无时无刻都在激励自己。当科研遇到挫折时,他们会不断安慰和鼓励自己,让我重获信心;而当自己研究取得突破时,他们也会和自己一同分享喜悦。他们都是自己人生中不可或缺的人。
(如您需要查看本篇毕业设计全文,请您联系客服索取)