24Сʱ���Ķ�������
24Сʱ���Ķ�������
ժҪ
���������������������������ռ�С�Ƚṹȱ�㣬Ŀǰ���౻����Ĺ�������ת����ʵ�ʹ���Ӧ�ã�������������˵���˳�Ժ����������������Ƶ��ص㣬��˽������ۺ϶��ߵ��ص�������������岢����������Ϊ�о��ȵ㡣�����ͻ�����ͬʱ��߾��������˺�����������˵��ŵ㣬������չ���������˺�����������˵��¹��ͺ�Ӧ������������Ҫ���о����塣���Ļ��ڴ˹�˼�����һ���ܹ�ʵ��ץȡ��ҵ����������岢�������ˣ�����չ����Ƽ�����о���
�������ȣ�����������岢��ץȡ�����˵Ľṹ���û����˵�֧��Ϊ3�鲢����ʽ�������������ĩ��ץȡװ��Ϊ���˻���ʽץ�֣�ͨ�����Ը˶Զ�ƽ̨��ĩ��ץȡװ�ý����������ƣ�ʹ�����3���ɶ��˶���̬�Ͷ���״�����ץȡ���ܡ�
��������SolidWorks�Ըû����˽�����ά��ģ���õ���������ģ�͡�ͨ����Ч��D-H�������������岢��ץȡ�����˵��˶�ѧģ�ͣ�������������⼰�ſ˱Ⱦ��õ��˽�������ʽ������MATLAB�з����õ��乤���ռ䡣
������Σ�ͨ��ADAMS�������������������˶����档������ADAMS����������ķ����������˾�����������������ĵ��Ըˣ�ͨ�������˶�����õ��˻����˵��˶���̬��������ߣ���֤�˽ṹ��Ƶ���ȷ�ԺͿ����ԡ�ͨ��ANSYSWorkbench������̓���������о����ṹ��������֤����ṹǿ�ȵİ�ȫ�ԣ���ͨ��ģ̬�������õ�ǰ6��ģ̬���ͺ�Ƶ�ʡ�
�����������3D��ӡ�ͽ����ӹ��ķ�ʽ��������мӹ���ͨ��װ�������������Ϳ���ϵͳ���γ�һ̨ ����������������������ץȡ����ʵ�飬��������������ܹ�ʵ��3���ɶ��˶���Эͬץȡ������������������������˶�״̬�£���ƽ̨�ڶ�άƽ���е�λ�ñ궨ʵ�飬��ʵ�ʲ���λ�����������ۼ�����жԱȣ��Ӷ���֤�˶�ѧ���۷�������ȷ�ԣ�ʵ�����������ۼ�����ʵ�ʲ������֮����������г��������ʴ����ʱ�����Ϊ2.91%,����������������Ҫ�ں����о��ж������Ķ�λϵͳ�����Ż�����ȷ�ز������ٶ��˶�ѧ����ʽ����������
�����ؼ��ʣ������岢�������ˣ��ṹ��ƣ��˶�ѧ������ ADAMS���棺 ANSYSWorkbench���棺����

ABSTRACT
����Parallel robots have many structural shortcomings such as small working space. As a result, a lot of configurations of parallel robots cannot be transformed into practical engineering pplcaions. The compliance and dexterity of continuurm robots are their unique characteristics. In recent years, the novel continwum parallel manipulators which combine the characteristics and the advantages of both parallel robots and continwum robots have gradually become a research hotspot. It is of great significance to expand the new confguration and application fields of parallel robots and continwurm robots. Inspired by this idea, this paper proposes a novel continuum parallel grasping manipulator, and the research contents are as follows.
����Firstly, the structure of the continuum parallel grasping manipulator is designed. The legs of the manipulator are three sets of continuum mechanism in parallel fom, and the grasping device on the moving pafrm is a linkage mechanism grasper. The elastie rod is used to drive the moving platform and the grasping device, s0 that the manipulator has 3-DOF motion posture and grasping perfommance of the cylindrical objects. SolidWorks is used to build the virtual prototype model. Kinematics model of the manipulator is established by the equivalent D-H method, and then the forward and inverse kinematics and the Jacobian matrix are solved with analytical expressions. In addition, the workspace is analyzed in MATLAB.
����Secondly, the motion simulation of virtual prototype is earried out by ADAMS.
����The method of establishing flexible body by ADAMS is introduced and the elastic rod with large bending deformation characteristics is built. The motion posture and output curve of the manipulator are obtained, which venifies the correctness and feasibility of its structural design. In ANSYS Workbench, the static structure of the virtual prototype is analyzed, and the safety of its structural strength is verified. Through the modal analysis, the first 6 modes and their frequency are obtained.
����Finally, the parts of manipulator are produced by 3D printing and metal pocessing By assembling parts, building the drive and control system, a physical prototype is created. The experiment of grasping operation taken on the prototype shows that the manipulator can achieve 3-DOF motion and cooperative grasping operation. The position calibration experiment of the moving platform in the two-dimensional plane under special deformation motion state is carried out, and the actual measurement position coordinates are compared with the theoretical calculation 1o verify the correctness of the kinematic theoretical analysis, the experimental results show that there is an error between the theoretical calculation and the actual measurement results. At the naximum stroke, the error rate is the largest, which is 291%. and the error distance is in the centimeter level. The positioning system of the prototype needs to be optimized in the subsequent study, and then the kinematics fomwla can be crrected afiter more accurate measurement.
����KEYWORDS: Continwum Parallel Manipulator; Structural design; Kinematics analysis,ADAMS simulation; ANSYS Workbench simulation; Prototype
Ŀ¼
����1����
����1.1 ѡ�ⱳ��������
������ҵ������������ҵ����ġ����ж���ġ��Զ��ġ��ɿصġ��ɱ�̵Ļ�еװ�ã����漰�˰�����е���̡��������ѧ�����ӿ��ƹ��̵�ѧ�ƣ��Լ����ɴ��м�������⼼�����˹����ܵ��Ƚ��������Զ���װ��".��ȥʮ���������й�������ҵ���Ͷ����ɱ�����ÿ����������12%��������ζ���ҹ�������ҵ���ڸ������������������ʱ������ҵ�����˵����벻�����Դ�����������ظ�ʽ������ʽ�Ĺ���������������Ч�ʣ����������������ʤ�ε�ijЩ����֣�������ӵĻ�������Σ�յĹ�����
�������������������¹����ձ��ȴ����Ĺ��Ҷ�������ͻ�ƻ����˼���������������ҿƼ���չ���ص���ҵ�����ƶ���-ϵ�з�չ�滮��ս�ԡ�2013 �꣬�¹������˲���"��ҵ4.0"�ƻ���������Ͷ���ܼ�2�ڵ�ŷԪ֧�ָüƻ������������¹����칤ҵ���ִ��������ܻ�ˮƽ��2015�꣬�ҹ�����ԺҲӡ�����й�����2025������Ϊ�й���չ��ʵʩ����ǿ��ս�Ե���ʮ���ж����죬ּ���������ҵ�����ֻ�ˮƽ�����绯ˮƽ�����ܻ�ˮƽ����ݸ��콫��������Ϊ�����Ҫ��չ�����е�����һ������������ڽϸߵ�ս�Ե�λ��ϣ���ҹ��ܹ���������˱���ؼ��㲿������ƣ�ϵͳ������Ƶ���ؼ�����ƿ�����ⰼ1.
�������ǣ����ǿ�ʼ����ע��۽��ڹ�ҵ�����ˣ���������ҵ���������������Ч�ʡ������˹��ɱ�������Σ��ϵ������֤��Ʒ�����ȷ��������ֵľ����á���ҵ�������ڻ�е�ӹ����������������պ��졢ץȡ���˵������е�Ӧ�ñ��صõ�������������
������Ŀ������ʵʩץȡ�����ǹ�ҵ������ִ��Ƶ����ߵĶ���֮һ���ò���Ҳ�ǻ����˽��зּ���⡢���˺�װ�������֧�ż������������˵�ץȡ����Ҫ�����ڽ϶�ʱ���ڽ�����ʵ��������λ�ü���ƶ������ض��������»���Ҫͬʱ���ж�Ŀ������������̬�ĵ��������ץȡ�������ڴٽ�����Ч�ʡ���Լ�˹��ɱ����Ż�����Ч�ʡ�������Ա��ȫ�Եȷ�����кܴ�ķ�չ�ռ䡣
�������罫��ҵ������Ӧ���ڶ������ץȡ�Ͱ��˷���Ĺ�������20����70���ĩ9,�ձ��״ν������˼���Ӧ����ץȡ��ҵ�����ձ��������͵¹�Ϊ�Ķ��������ץȡ�����˵��о������϶�ȡ��һ���̶ȵĽ�չ�� ���ҹ�����ҵ�����˵��о���Ӧ������ʼ��1970�����Ȼ���ܵ���ʱ�ҹ��������Ƶ��Ƽs��������ص�Ӱ�죬��չһֱ��Ϊ�������о�������Ӧ��ˮƽ������ͺ���20����80���֮���ҹ����״ν���ҵ�û�����Ӧ����ץȡ��ҵ������Ŀǰץȡ��ҵ����Ļ�������Ȼӵ�о�ķ�չǰ����
������ͳ�Ĺ�ҵ�����ˣ�һ�����ɻ�������������粿������ۡ�С�ۡ����ֲ����ɣ����С����������ʽ���ӣ��ʳ���Ϊ�������������������緢չ��u���죬Ŀǰ�ڹ�ҵ��Ӧ����ץȡ��ҵ�Ĵֶ��Ǵ��������ˣ�����������ڴ�����ʽ�����۹�����ʹ��������ԡ��˶������Լ��������ܶ���һ���̶� ���ܵ����ơ��ڶ��������ս������ʼ��ѧ�߹㷺�о��Ŀռ䲢�������ͻ����˿��Թ�ܴ��������˴��ڵ�һЩ�ṹ�Աˡ�����������һ����ָ��ƽ̨�Ͷ�ƽ̨ͨ���������ϵ�֧����ɵľ��������������������ɶȵ�һһ�ַ�սṹ���ڸ��Ի����������봮�������˻������������չ�˻����˵�Ӧ�÷�Χ��������������Ȼ����ڴ��������˷�չ����������������иնȽϴ��ۻ�����١��������ܺá��˶��ٶȿ졢���ȸߵ��ŵ㣬���Ǻܿ챻Ӧ���ڹ�ҵ�����˵ĸ�����ǡ���������������Ҳ����һЩ�ṹ �ϵIJ��㣬�繤���ռ�Ƚ�С������ʹ��������ץȡ��ҵ���������ﵽ���������ڹ�ҵ�ϵĹ㷺Ӧ�ó̶ȡ�ĿǰӦ���ڹ�ҵ��������ʵ��ץȡ��ҵ�IJ���������Delta����1������������Ϊ���������ܶಢ��������δ�Ӽ����о�����ת��Ϊʵ�ʹ���Ӧ�á����������˵�֧����֧����֧���붨ƽ̨��֧���붯ƽ̨֮����˶�����Ӱ���˶�ƽ̨��ƽ�ƺ�ת������ʹ�乤���ռ䷶Χ��С���Ҷ�ƽ̨ת���˶���ͼ���ޡ���ˣ����Ʋ��������Ĺ����ռ��С��������������������ڹ�ҵץȡ���������ϵ�Ӧ��ǰ������Ҫ�����塣
����������������һ�־�������������˵��о����ڲ��������Ļ�������������������˵Ľṹ�ص㣬ͻ�ƴ�ͳ���������ĸ��Խṹ���Ծ������Ʊ����������˶�֧��ȡ������֧�������˶��ؽڣ�ʹ�����������ڱ���ԭ�г�������ǿ���նȴ�����Ƶ�ͬʱ���������������˵Ĺ����ռ���˶�������˳�ԡ������ɶȡ��˻�������ȫ���ص㣬��һ���̶����ܹ����ƾ�����������������������Ľṹȱ�ݣ�������ؿ��˾��������˺�����������˸��Ե��о���֧��������Ҫ���о���ֵ���ܴ����˷�չ��������������Ľ���ƺ�����- - ���ۺϲ��������˺�������������ŵ�������岢��ץȡ�����ˣ�Ϊ�ؿ�������������ץȡ��ҵ��ǵ�Ӧ���ṩһ�����о���ֵ��
����1.2�����������о���״
����1.2.1�����������
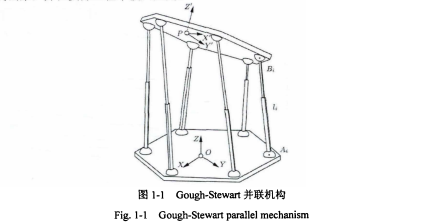
����������������Դ�����ݵ�20����30�����1931�꣬wintt!l�����һ�ֻ������沢��������Ƶ�����װ�ã�������ר����1940�꣬Pllardl��һ��ר����������һ��ռ侮�����������ڽγ���������ҵ��1962 �꣬Gough�ɷ�����һ-�ֻ���6���ɶȲ������������ڷɻ���̥�ļ��װ�á�1965 �꣬Sewa!I��һ �ζ�Gough����Ļ������˻���ѧ����������о����������ƹ�Ϊ�����˶�ģ�����װ�ã����ڷ���Ա��רҵѵ�����û�������ΪStewartƽ̨��Gough-Stewart��������ͼ1-1 ��ʾ��Ŀǰ�ѳ�Ϊ���������Ĵ����Թ��ͣ��ڸ���ǹ㷺��Ӧ�á�1978�꣬��������ѧר��Hun����2l�����о��н�Stewartƽ̨Ӧ���ڹ�ҵ�����ˣ����- -��6���ɶȵĻ��ڲ��������Ļ����ˣ����Dz��������״�Ӧ���ڹ�ҵ�����ˣ���־�ž��������˵ĵ������Ӵ���Բ��������˵��о���������Ļ��Stewart ���������ijɹ�Ӧ�ã������˹������������ڶ�ѧ�ߵĹ�ע���������ô��ѧ��Gosselinl3l, ������ѧ��Tsai 4�Լ��й���ѧ����Ⱦ�����������о��������ԡ�
����������������չ��ϵͳ�������о��������о������룬���ྮ�������¹��ͱ����Ƴ���������ʵ�ʹ�����Ͷ��Ӧ�á�
���������������ڷ�չ֮������Ϊ�Ǵ��������˵��¼�����I5,Ȼ�������ڽṹ�������ϵĶ�ż��ϵ��ѧ�������֣�������Ӧ����Ӧ�������ƻ����Ĺ�ϵ���ǻ���������봮�������Աȣ������������������ŵ㣺
������1���նȸ߲�������һ��ӵ�ж�֧�����γɿռ�ջ���ܵĽṹ��ʽ��������գ��ڳ��ܸ���ʱ�������ı��ν�С������ڴ��������˵�����֧����ʽ��������������ĸնȸ��ߡ�
������2����������ǿ�����������������������ʱ��Ҫ�ۼƸ������۹�������������������Խ����ĩ�˵Ĺ������ܵĸ���Ҳ��Խ�������������۳�������ʱ��������֧������ӣ���˻������������������[16].
������3�����ȸ߲����������˶�֧��-����Խ϶̣������ڴ��������и������۹������Ե��ӵ��ۻ���ʹ�ö�ƽ̨���˶���λ���ȸ��ߡ�
������Ȼ���������������������ŵ㣬����������Ҳ���������IJ��㣬�����˶�λ�˴��ڽ�ǿ������ԣ��������������ԣ������ռ�С���������˶����ƱȽϸ��ӣ��ṹ������ѵȡ�
����1.2.2����������Ӧ������
�����ڹ�ȥ40�����У������о�������˲�ͬ��ʽ�IJ���������ʹ����װ�������ߡ����պ��������������������������������ش������Լ��������ϴ������������˹㷺Ӧ��7.
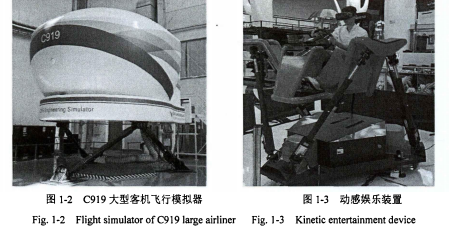
������1���˶�ģ��������ѧ������ѧ��Stewart ��1965���״ΰ�6���ɶȵ�Gough-Stewart����������Ϊ����Աѵ���ķ���ģ�������Ӵ˿������������ڸ�����Ӧ�õ��Ⱥӡ�Ŀǰ��������Լ�г����ټ���ҵ������������ڲ��������ĸ����˶�ģ��������Ҫ�������Ϳͻ��ķ���ģ��ϵͳ����ͼ1-2��ʾΪ���ҹ����Ƶ�C919���Ϳͻ�����ģ����������������ģ��ϵͳ�Լ��ִ��˶�ģ��ϵͳ�ȡ���������ˮƽ�IJ�����ߣ����������ַ��������й�����Ҫ��ҲԽ��Խǿ��Ϊ�ˣ�����ʦ�����ò��������ֿ���������ģ�����̬�˶��Ķ�������װ�ã���ͼ1-3��ʾ��
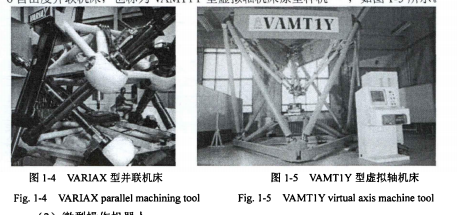
������2�������������������ڹ�ҵ�ϵĴ�����Ӧ������Ϊ���ؼӹ����ĵĻ����ṹ�����ּӹ�װ���ֳ�Ϊ����������Parallel Kinematic Machine, PKM�� ��������������ǻ����˼��������ؼӹ�������ϵIJ��������������Ϊ��"21���͵Ļ���",һ��������������ǵĹ㷺��ע�����������ij����ǻ�е�ӹ��豸�ڽṹ������ľ��ش������һ-����1994 �꣬������֥�Ӹ�ٰ��IMTS'94���ʻ���չ�����ϣ� .
��������Giddings & Lewis��˾�״�չ����-��VARIAX�Ͳ�������������ҵ�������˲�С�ĺ䶯������һ̨��Stewartƽ̨Ϊ�ṹ������5������ʽ���ؼӹ����ģ����ڲ��ṹ��ͼ1-4��ʾ�����ij��ֱ�־�Ż�����ʼ���ò�������������ƣ��ǻ����ṹ�ش�ĸ����̱������ŷ��һЩ��ҵ������Һ��ձ���Ҳ��ʼͶ��÷�������ƣ������Ƴ���ͬ���͵IJ��������������NeosRobotics��˾������Tricept-IV�Ͳ����������¹�Mikromat��˾�Ƴ�����ʽ�ӹ�����6X Hexa;��ʿ�����ѧԺ���Ƴ��IJ�������HexaGlide:�ձ�Toyoda��˾������6֧������HexaM�ȡ��ҹ���- - ̨����������1997�������������廪��ѧ������ѧ�������Ƶ�6���ɶȲ���������Ҳ��ΪVAMTIY�����������ԭ������],��ͼ1-5��ʾ��
������3���Ͳ������������Ź�ҵ�ϵ�ͻ�ƣ�����ҽѧ�����������﹤��������ӹ�����ȵ��Ͳ���������Ҳ���ϻ�ù�������о�ѧ�ߵĹ�ע��ȡ�ü���ķ�չ�ٶȣ��ѱ�Ӧ�õ�����������ϸ���ķָע�䣬�ͻ�����Ʒ�ļӹ���װ�䣬����ϸ�����������
������4������Ӧ���ھ���ȷ��λ���棬���������˽϶�ر�Ӧ��Ϊ��������������ҽ��������е��������ʽ�IJ�������������ʽʸ���������������������ķ���ƽ̨���ռ�վ�Խ�װ���������ھ��������������ֵ�19.201.
������Ϊ���������ڹ����϶��DZջ�֧���ṹ��ʹ�乤���ռ���ͬ�ߴ�Ĵ����������Ҫ��С�ö࣬�ڽϴ�̶��������˲��������ڸ��������Ӧ�á���ˣ����ڹ����ռ�ϴ�IJ����������о��Dz��������������Ҫ�о�����֮--.Ŀǰ�����ڴ����ռ䲢���������о�������Ҫ�У�
������1�� ����µľ��д����ռ�IJ����������ͣ�
������2�� ������еĹ��ͽ��нṹ�Ż�����������Ч�����ռ䡣�����ռ�IJ�������ͬʱ�߱����������ʹ����ռ���ص㣬���ڸ���������Ҫ���á�
����1.3������������о���״
����1.3.1����������˼��
�������ŷ��������ķ�չ���������о��������-�����͵ķ��������ˣ�����������ˡ��������ɢ�ؽں��Ը˼��ṹ����ɢ�ͻ����˲�ͬ������������˲�������ǡ����㴥�ֵ������������Ƶ����Խṹ�����پ߱��κ���ɢ�ؽں���������һ����˵������������˲����д�ͳ�����ϵ���ת�ؽڣ�����״�ɻ������������������ε�ƽ���ռ����߱���2.�������͵ķ��������˾����������������ܣ��ܹ������ϰ���ͻ���������������˳�ظı���������״������С�ĺ��ӵķǽṹ�������н�ǿ����Ӧ�ԡ�
�����������������Ҫ���ŵ�У��У� ��1�� �ռ������˶��� ��2�� ����������ߴ���Դﵽ��С��״̬���ܹ�����С�Ĺܵ�����״�ռ����˶��� ��3�� �Դ��ڸ��Ӷ��ϰ���IJ���������Ӧ�Խ�ǿ�� ��4�� ���˿�����ĩ�˰�װִ�����⣬���������˱���Ҳ�������ץȡ������
���������ͻ�������Ҫ��ȱ���У� ��1�� ���ڶ����ɶȣ��������ƱȽ����ѣ� ��2���˶���λ���Ȳ��ߣ� ��3�� �����ձ����ϸ���Ľṹ���������ƣ����������ϵ͡�
����Ŀǰ���㷺�о�������������˵�����������Ҫ����������������Tendondriven����Ҳ�ɳ�Ϊ��/���������������������� Pneumatic drive������״����Ͻ�������Shape memory aloy�������嵯��������Fluidic elastomer actuator���ȡ�
����1.3.2�������о���״
�������ڶ�����������˵��о����Ի�����20����60���ĩ��24,��ʱ��Ҫ�����λ�����Ϊ�������೬�������ɶȻ����˲��ý��ܵĴ���������ʽ�Ĺؽ�ģ���ߵļ����ṹ�����为�������͡�λ�þ��Ȳ�Լ��˶�ѧ������ѧ�������о�������Ϊ��������������������������˵Ľ�-һ�� ��չ��
����21���ͳ��ڣ������������ȡ���˾�ķ�չ�����У���WallkerΪ���ĵ��Ŷӿ�չ�˴����Ļ����о��������������������������ص������о���ϵ[251.���Ŷ����Ƴ��˶�����ʽ������������ˣ� Hannah ��Walker����2����2001�����Ƴ���һ�ֳ��������ɶȵ�����ͻ����ˣ���ͼ1-6��ʾ���û������ɹ���16��U�ؽڴ�����ɣ�����Ϊ�����ȳ���4���֣�ÿ���ְ���4��U�ؽڣ�ÿ��U .

�����ؽھ���2�����ɶȣ��������뵯����ϣ�ʵ�ֻ�Ͽ��ơ�Walker ��Gravagne���ˣ�37.28��2002�����Ƴ���һ��ƽ����ʽ������������ˣ���ͼ1-7��ʾ���û�����������4�νṹ������ɣ�ÿ�νṹ������2�����ɶȡ�������ʽ��������������������������ץȡһ����״�������ı��������塣
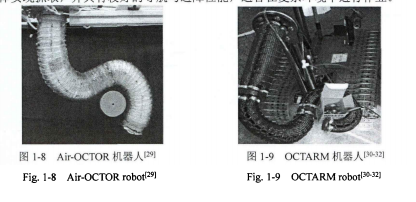
������2005�꣬Walker ��McMahan����29���Ƴ�����Ϊ"Air-OCTOR"������������ˣ���ͼ1-8��ʾ���û����˲��������ṹ��Ϊ������֧�ţ���������ʽ�ϣ�����3�������������ṹ���ڲ���ѹ�������˶����ܹ�����������쳤����̬�仯��Wallker ��Jones����13032��2006�����Ƴ���һ����Ϊ"OCTARM"��ģ�����㴥�����ε�����������ˣ���ͼ1-9��ʾ���û����˲��������˹�������Ϊ�������������峤�ȿɷ�Ϊ4�Σ�ÿ����3-6�������˹��������������ʵ��3�����ɶȵ�������̬���ܹ�����12�����ɶȡ�OCTARM������������ܹ��Ը�����״������ʵ��ץȡ�������нϺõĵ�����������ܣ��ʺ��ڸ��ӻ����н�����ҵ���ڼ䣬����ѧ�ߺ��о�����Ҳ����˸��ָ���������������ˡ���Լ��2002-2005�꣬����Ӣ����OC�����˹�˾3I�����ɹ��������������תΪ��ҵ���Ļ��������з����������������ͨ��������������ķ�ʽ��ĩ�˽���Զ�������������νṹ���Խ�����������ͼ1-10��ʾ��

����2003�꣬ Peirs ���˽������- -���ڿ��������ˣ���ͼ1-11��ʾ������������������û������ɳ�����NiIT�Ͻ�ܹ��ɣ�����4�������������������2�����ɶȣ������ⷽ��������ǿɴﵽ90�ȡ�
����2007�꣬Choi ����P5]�����һ�ֻ��ڵ��ɹǼܵ����������ڿ��������ˣ���ͼ1-12��ʾ���û�������3�������������������3�����ɶȣ�����������˶�����ά�ռ������ⷽ���ϵ������˶���
����2014�꣬ Rone��Ben-Tzvi36I������͵Ķ������������������������һ����ѧ��ģ��������������ʽ�ĸ����������������������������֤����ͼ1-13.
�����÷���ͨ���߱���ļ��в���ģ�ͣ�ͬʱ��һ����ɢ�������������˸����������ʱ仯����Ĺ��ɣ��������鹦ԭ���������˵ľ���ѧ�Ͷ���ѧ����Ϊ-�龲̬ģ�͵Ĵ����������һ-����ϵ�ʵʱ���ַ��̡�
����2014�꣬Xu��Siman!37���һ�ֲ����˳����Ե�NiTi�Ǽܺ��������������������ˣ���ͼ1-14��ʾ���������������۶�����������˵��������������������۷�����ʵ����֤�������ۻ���ĩ��ִ���������ÿռ��Ť���ռ�֮����ſɱ�ӳ�䣬�������ֵ�ֽ⣬�ٷ����ⲿ�Ӵ�����
����2015�꣬Giorelli ����8������һ�ַ��������Ի�е�ۣ���ͼ1-15��ʾ��������ε�����ṹ�������������������ֱ�- -�� ��������Χ��ת���������û���
����е��ͨ�����ǣ����ʹ�������������������Ի�е�۲�������������ͨ���������������������ÿ���ʹ��е�۳������ⷽ��������
����2016�꣬Qi��[9]�����һ�������������е�֣��ɶ������ƽ�浯�ɴ�������ͼ1-16��ʾ�������˲��ÿɱ���˫��ƽ�浯�ɹ��ɹؽڣ��ڷ��������������¿ɲ����������Σ���������������������������������Σ�ӵ��3�����ɶȣ�������ͨ��3�������������������������Ƕ�Ϊ160°���ڶ�������������˵��о���ʼ������Ŀǰ�Ը÷�������о��Ļ�����ѧ�߽���140.2010 �꣬���Թ�������ҵ��ѧ�������������������21.414]�����һ��������������������ˣ���ͼ1-17��ʾ�����������˶�ѧ����ķ��������档
������2013�꣬�����ڼ��еĻ����ϣ��Ľ���Ƴ���һ���ɶ�ؽڶε��������ͽṹ��ɵĽ᳦�������ˣ���ͼ1-18��ʾ���û�������5���ڳߴ�����ȫ��ͬ�ĵ��ؽڶνṹ������ɣ�����Ӧ������Խ᳦ǰ�κ��жεļ�����顣
����2012�꣬��ǿ��л�����[43]�����һ������������ˣ����������������������NiTI�Ͻ�˿������֧��NiTi�Ͻ�˿���Լ����̡�֧��Բ�̺�β����ɣ�ʾ��ͼ��ͼ1-19��ʾ��2013�꣬�����Ե���4]����������帹ǻ�������ˣ���ͼ1-20��ʾ���û������ɳ�����NiTi�Ͻ�˿���ɵ����Ǽܡ��ιǼܺ����Ͻ����ɵ�ת��Բ�̡��̶�Բ����ɣ��ܹ�����5���ɶȡ�
����2019�꣬���ٽܵ�4�����һ�ֻ�������������ͻ����ˣ���ͼ1-21 ��ʾ���û����˵�������Ϊ����ͣ�����������Ļ���������NiT�Ͻ���ϵ��Ըˣ�ͨ��ģʽ�л�����������ʹ����������ѹ�����뵯�Ը���������ģʽ֮���л���ʵ��
�����ֽϴ�Χ���˶���С��Χ�ľ�ȷ��λ�����˶������иն���Ӧ�����ı䡣
����1.4 �����岢���������о���״
����2008�꣬Zhu�ȣ�[4��- -��ר��������������������ס����˶��ľ��ж����ɶȵģ���6������֧�����Ӷ�ƽ̨�Ͷ�ƽ̨�����Բ��������ˣ���ͼ1-22��ʾ��
��������������˶�������˳����������ͬ���û������������õ��Բ������ɣ����붯ƽ̨�̶����ӣ�ͨ������ȵ���������ʹ��ƽ̨�˶����û�������Ϊ�Dz�������������˵����繹�룬����ѧ�߲�δ��Ըû����Ľ�ģ����������ƺͿ��Ʒ���չ���о���
����2014�꣬������������ѧ��Bryson�Ŷ�47-511���о����״������������������˵ĸ��Parallel continuum manipulator�������ڴ�ͳ����Stewart ƽ̨�Ļ����Ͻ��д��£����- -��˿�����IJ�������������ˣ���ͼ1-23��ʾ���û�����Stewart��6������֧���滻�ɵ���˿��ͨ���ƶ�������6������˿��ʹ˿���������������Ӷ�ʹ��ƽ̨�ﵽ��Stewart��������һ�����пռ�6���ɶȵ��˶����ԡ�
����2015�꣬Orekhov ��lS2, 53������������������˵ĸ���Ӧ����ҽѧ����������������ڿ����������Ͳ�������������ˣ���ͼ1-24��ʾ����ֱ����12mm,����6���ɶ��˶���ʽ������������Bryson��������IJ����������������ƹ�˼����ĩ��ִ������װ����ǣ����2���ɶȵļг�װ�ã���ʵ������Զ��������
����rg 1-24 raruel comonuun sugca T00ol wiul Tope uc10n Per"2017�꣬Orekhov��Aloi��154]���-�־��б������ɹǼ��͵IJ�������������ˣ���ͼ1-25��ʾ���ڵ����Ϸֲ��ŶԵ��Ը�֧������Լ�����õ��м�Բ�̣�ʹ���Ը�������ʱ��������ķ�ɢ���Σ�ʹ�����˾���6�����ɶȡ�
����2017�꣬ Altuzarra��15]�����һ��2���ɶȵ�ƽ�������岢����������ͼ1-26��ʾ���û�������2�����Ը�����1��ĩ���˶��㣬��ֱ���������������µ��Ը˲������Σ��Ӷ��ƶ�ĩ���˶����˶�����������"�����岢��������"�������»������䱾�������ۺ��˲���������������������ص������Ĺ��͡�
����2017�꣬�ҹ����Ϻ���ͨ��ѧWu��156, 57]���һ��ģ��FESTO��˾�ķ�����ǻ�е�ֵIJ�������������ˣ���ͼ1-27��ʾ��Ϊ����ǿ�նȣ��ṹ����ϲ����ɿ���խ��Բ��ʽ����6��ֱ��Ϊ5mm�IJ�����ά�˲�����ɣ�����3��Ϊ�������ˣ�ͨ�������������˿�ܽ���������������Ϊ���������������նȣ���������������������߶Գơ�
��������ҵӦ���ϣ��¹�FESTO��˾Ҳ������������˶�װ�õ�������Ʒ58],��ͼ1-28��ʾ���û�����ͨ��4�������������Ӷ�ƽ̨�붨ƽ̨�����ڶ�ƽ̨װ�з�����������Ӧץ�ֽṹ��ʵ������ץȡ����
�������ϣ������岢�������˺;����������������Ȼ�����������𣬵���������ͬ�����߾�Ϊͬʱ��߲��������Ľϴ�ն����Ժ��������������˳�Ե��ŵ�����ͻ����ˣ�������չ�����о���Ȼ��������Ҳ�ܿ��Ϊ�о��ȵ㡣�����岢���������ڽṹ�ϲ�ͬ�ڴ�ͳ�ĸ��Թؽڲ��������ˣ������ʹ�õ�������֧����������ȫ��ʹ�ø��Թؽڣ��Ӷ�ʹ����ӵ�����������Ĵ���״���Σ��˶���Χ�ϴ����������岢���������������˳�ؽڵĻ����˵����ͬ���ڣ������ڽṹ�Ͼ��д�ġ������Ե������Ӷȱ��Σ��������������������������˼��ֲ��������Ǽ�����ij���ض��ĵ��С���Ρ������岢������������ڳ�������ʽ������������˾��и��ߵĸ������������Աȸ��Բ��������ˣ����и������˳�ԣ������ռ䡣�����岢���������ܹ���Ӧ���Ӳ�����Ŀռ价����������֧�������Ҳʹ��������С�ͻ���ʹ������Ҫ�˻������Ĺ��������±��ֳ����ߵ���˳�ԺͰ�ȫ�ԣ�Ҳ��Ӧ������������������˾��нϹ������о�ǰ����
����1.5 �����
���������������������������ռ�С�Ƚṹȱ�㣬Ŀǰ�������ת����ʵ�ʹ���Ӧ�ã�����������˵���˳�Ժ����������������Ƶ��ص㣬�ۺ϶��ߵ��ص�������������岢������������ͬʱ������ŵ㣬������չ���������˺�����������˵��¹��ͺ�Ӧ������������Ҫ���о����塣���Ļ��ڴ˹�˼�����һ���ܹ�ʵ��ץȡ��ҵ����������岢�������˽�����Ƽ��о���������֯�ܹ����£�
������һ�²����˱������ѡ�ⱳ�����о����壬��Ҫ�����˲��������˵ķ�չ��Դ��Ӧ����״��������������ڹ��ͷ���ķ�չ���о���״���Լ������岢�������˵��о���չ���j����״��
�����ڶ����ۺ��˲���������������������ص㣬���3�����������������Ϊ֧���IJ��������˹��ͷ��������������Ƚ�ѡȡ����-������ʽ���Ը������������微����������Ϊ�о���������SolidWorks ����չ����ά�ṹ��ƣ��õ�����������ģ�͡�
�����������������Ļ��������˹��ͼ������˶�ѧģ�ͣ����õ�ЧD-H������������˶�ѧ�������⣬���ſ˱Ⱦ�����з�����⣬����MATLAB�õ��乤���ռ䡣
������������Ҫ��̓������ģ��չ����֤�ͷ���������ADAMS��ģ�ͽ����˶�����ģ���������֤���������ṹ��Ƶ���ȷ�Լ������ԣ����ؼ��������˶�ѧ���ߣ�Ϊ���Ʋ����ṩ���ݡ�����ANSYS Workbench��ģ�����Ƚ��о����ṹ��������֤��ṹǿ�ȼ���ȫ�ԣ���ν���ģ̬�����������ǰ6��ģ̬���ͼ���ʣ�Ϊ������������ʵ��춨������
����������ͨ��3D��ӡ�ͽ����ӹ��ȷ�ʽ�������ĸ����ṹ������мӹ����죬�����ϵͳ��װ���������ԭ��������������չ������ʵ�鼰�˶�ѧ��֤ʵ�飬��֤��������ȷ�ԺͿ����ԡ�
���������¶Ա��ĵ��о����ݽ������ܽᣬ������������������δ���о������չ����
����2�����微��ץȡ�����˵����
����2.1���ͷ������
����2.1.1�����������岢������
����2.1.2���Ը����������岢������
����2.2̓�������ṹ���
����2.3������
����3�˶�ѧ�����ܷ���
����3.1�˶�ѧ����
����3.1.1�˶�ѧ��ģ����
����3.1.2����ؽڿռ�-�����ռ��ӳ��
����3.13�����ռ�-����ؽڿռ��ӳ��
����3.1.4����ؽڿռ�-�����ռ��ӳ��
����3.1.5�����ռ�-����ؽڿռ��ӳ��
����3.1.6�ſ˱Ⱦ������
����3.2�����ռ����
����3.3������
����4��������������֤����
����4.1�˶�����ģ��
����4.1.1 ADAMS����
����4.1.2���ݽӿ�ת����ģ�͵���
����4.1.3 ����������Լ�����
����4.1.4����Լ�|������
����4.1.5���������幹��
����4.1.6�˶�����
����4.1.7������������
����4.2����Ԫ����
����4.2.1 ANSYS Workbench���
����4.2.3ģ̬����
����4.3������
����5��������������ʵ��
����5.1����Ӳ�����������
����5.1.1������췽��
����5.1.2 ���Ը˲���ѡ�ü�����̷�ʽ
����5.1.3����ģ�鼰����ϵͳ
����5.2��������ʵ��
����5.4������
6�ܽ���չ��
����6.1���Ĺ����ܽ�
����Ϊ����չ������������ץȡ��ҵ�����Ӧ�ã��������һ�����������������Ϊ֧���IJ��������ˣ���ĩ�˾���ץȡװ�ã��ܹ�ʵ��Զ�̲ٿء�ȫ�ĵ��о������ܽ����£�
������1���ڶ������岢�������˵��о���չ�ĵ��л����ϣ����ڲ���������ṹ��Ϊ���������˵��˶�֧���Լ���ƽ̨ĩ�˾���ץȡװ�õ���ƹ�˼�������3�ֹ��ͷ������ֱ��������������岢������������ʽ������ʽ�ĵ��Ը����������岢�����������������ȱ��ķ����Ƚϣ��ۺ���ƺͺ����о��Ŀ����ԣ�ѡȡ����ʽ�ĵ��Ը����������岢��������Ϊ�о���������SolidWorks ����չ����ϸ�Ľṹ��ƣ��õ��������岢��ץȡ�����˵���������ģ�ͣ�2���������Ĺ��ͣ������˽ṹ�������õ�Ч��D-H�������˶�ѧģ�ͣ���������ռ�-����ؽڿռ�-�����ռ��ӳ���ϵ�Ա�ʾ���������˶�ѧ�������õ���Ӧ�Ľ�������ʽ�ͱ�ʾ�ٶ�ӳ���ϵ���ſ˱Ⱦ�������MATLAB�Եõ������˶�ѧ����ʽ���з������õ��乤���ռ��ʾ��ͼ����������乤���ռ�ϴ�Ϊ��״�İ���ռ䡣
������3���������ݽӿ�ת����̓����������άģ�͵���ADAMS�У��Ը��������������ϲ�������Ӧ��Լ����ϵ�����������幹����Ϊ���Ըˣ�������������ʹ������˶�ģ�⣬����õ�- -���ܹ�������3���ɶ��˶���̬��ץȡ������ʾ��ͼ����֤��̓�������ṹ��Ƶĺ����ԺͿ����ԣ�ͨ������ץȡװ���ϵı�ǵ���˶����߱���ץȡװ�����˶������е�Эͬ����״̬�������ƽ̨���ĵ�XIY/Z����˶����ߣ�Ϊ�������Ʋ����ṩ���ݡ�
������4���������ݽӿ�ת����̓����������άģ�͵���ANASYS Workbench�У���ģ���������о����ṹ�������õ��˿���״̬�µ��ܱ���λ����ͼ�͵�ЧӦ����ͼ����������ܵ���ЧӦ�����IJ���Ϊģ��֧�Ű壬���ֵΪ0.75705MPa,С��ģ��֧�Ű��������Ͻ������ǿ��280MPa,�ṹǿ�Ȳ��������⣬֤���ṹ�ߴ���ƺ�������ģ����������ģ̬�������õ���ǰ������Ƶ�ʺ����ͣ�����������������Ϊ��������ʵ���й�ܹ����ṩ����ָ����
������5�������۷������������Ļ����ϣ�ͨ��3D��ӡ���ͺͻ�е�ӹ����������������װ�䣬�����ģ��Ϳ���ϵͳ���γ�������������������������ץȡ��ҵ�IJ���ʵ�飬ʵ������ں���Эͬ�Ŀ��������£������˾��д����ռ���˶���Χ�Ͷ������������Чץȡ�������ܣ����������������˶��������������������˶�����Ч��һ�£� ��֤�˽ṹ��Ƶĺ����ԺͿ����ԣ����������������˶�ѧ��֤ʵ�飬ʵ�����������ۼ�����ʵ�ʴ��������г��������ʴ����ʱ�����2.91%,�������������Ҫ�����������������н�һ�����뾫ȷ�Ķ�λϵͳ����ȷ�ز������ٶ��˶�ѧ����ʽ����������
����6.2δ���о�չ��
�������ϣ��������һ�����͵������岢��ץȡ�����ˣ���������˽ṹ��ơ����۷�����������棬�������������������г���ʵ�飺����ʱ�����ƣ���Ըû����˵��о����ಿ�ֹ����ɼ������У�δ����Ҫ�������о�����
������1����ĩ�˶�ƽ̨�ϵ�ץȡװ�ý�һһ���о������������ͽṹ�����Բ��ϣ�������Զ���������ŵ㣬�Ż���ץȡ���ܺͿɿ����ԣ�ʹ�������˳�ԣ���߶Ա��������������Ӧ�ԣ�ʹ�������ܹ���������Ӧ�ó��������
������2�������������봫�м�����ϵͳ���Ի���������ά�ռ��е���״�Ͷ�λʵʱ���͵������Դ������˶�ѧ�����۽���ʽ����߶Ի����˵Ŀ��ƾ��ȣ�ͨ�����м��ͷ���ϵͳ��ʵ�ֶ��ϰ�����Զ����ù��ܣ�����䰲ȫ�ԡ�
������3���ڿ���ϵͳ���棬��������Ŀ������Ϳ����㷨��ʵ�ֶԶ�ƽ̨��ץȡװ�õĸ���Ч�ʺ;��ȵ�Эͬ���ƺ�ʵʱ������
���������
����[1]�����磬�������ҹ���ҵ�����˼�����״���ҵ����չս��[].��е����ѧ���� 2014, 50��9����[2] ���ɸգ� ȫ��1/4��ҵ�����������й�[J].�²����� 2015, 7: 34.
����[3] �ܼá���������һ-- "�й�����2025"����������[].�й���е���̣�2015, 26��17����2273-2284.
����[4] ��ʢ������Զ��������������ץȡ�����˵��Ż������·���滮[J].������ͨ��ѧѧ����2017, 41��1���� 101-106. .
����[5] ����Զ�� ����ȫ���˶���ץȡ�����˵�������о�[D].������������ͨ��ѧ�� 2017: 1-11.
����[6]���澮�������˼������ѧ����[].��ɽ��ѧѧ���� 1998, I: 13-17.
����[7] �������Ϊ���������ȡ� Deltaϵ�в����������о���չ����״[J]. �����ˣ� 2014,36��03���� 375-384.
����[8] Gwinnett J. Amusement deviceP].U.s. Patent 1789680. 1931-1-20.
����[9] Pollard J. Spray painting machine[P].U.S. Patent 2213108. 1940-8-27.
����[10] Gough V E. Universal tyre test machine[] Proc. FISITA 9th Int. Techrical Congr, 1962:117-137.
����[11] Stewart D. A platform with six degrees of freedom[]. Proceedings of the Intitution ofMechanical Engineers, 1965, 180��1���� 371-386.
����[12] Hunt K H. Kinematic Geometry of Mechanism[M]. USA: Oxford University Press, 1978:16-203.
����[13] Goselin C M, Lavoie E. On the kinematic design of spherial tree-degree -fedom prallelmanipulators{J]. The Intermational Jourmal of Robotics Research, 1993, 12��4���� 394-402.
����[14] Tsai L W. Kinematics of a three-DOF plafrm with three extensible lims/[/Recentadvances in robot kinematics. Dordrecht, Holland: Springer, 1996: 401-410.
����[15]��˼���������ɶȲ��������˶�ѧ�������ɶȲ����������������[D].�ػʵ�����ɽ��ѧ�� 2007: 1-10.
����[16]��ǿ3-UPU����ʵ��̨���о��뿪��[D]����������������ѧ�� 2016: 1-5.
����[17]���ᾮ���������������ۺ��������������о�[D].�ػʵ�����ɽ��ѧ�� 2012: 1-5.
����[18]�����ɣ��ι�飬����������������о���չһ��̸���廪��ѧ���Ƴɹ���VAMTIY��ԭ������[].�Ƽ������� 1998, 10: 32-34.
����[19]�Ը�Ⱥ���������˻��������Ͳ��������˹�����������[D].������������ͨ��ѧ�� 2016:
����[20]�ƹ��֣���Ծ�������������ȡ������Ŵ��㷨����˻����˶������Ż�[D������ͨ��ѧѧ���� 2015, 39��4���� 44-48.
����[21]�����������ʽ�᳦�ڿ���������ϵͳ�о�[D].����������������ҵ��ѧ�� 2011: 23-40.
����[22]�쿭����������������������������Ӧ��[]��е����ѧ����2018,. S4��13���� 25-33.
����[23]�������������������졣�����ͻ������о�����[J].������2010, 32��5���� 688-694.
����[24]������������������������������о�[D].���ݣ��㽭��ҵ��ѧ�� 2014: 1-16.
����[25] Rcker D C, Jones B A, Webster R J, A model for concentric tube continum robots underapplied wrenches[C��/2010 IEEE International Conference on Robotics and Automation,Anchorage, AK, USA, 3-7 May 2010. IEEE, 2010: 1047-1052.
����[26] Hannan M W, WalkerI D. The'clephant trunk'manipulstor, design andimplementation[C//2001 IEEE/ASME Intemational Conference on Advanced InelligentMecatronics. Proceedings ��Cat. No. 01TH8556���� Como, ltaly, 8-12 July 2001. IEEE, 2001:14-19.
����[27] Gravagne I A, Walker 1 D. Manipulability, force, and compliance analysis for planar continwummanipulators{[J]. IEEE Transactions on Robotics and Automation, 2002, 1803���� 263-273.
����[28] Gravagne I A, Rahn C D, Walker I D. Large deflection dynamics and control for planarcontinuum robots[] IEEE/ASME Transactions on Mechatronics, 2003, 8��2���� 299-307.
����[29] Mcmahan W. Jones B A, Walker I D. Design and implementation of a mulisection continumrobot: Air-Octor[CV/2005 IEEE/RSJ Intemational Conference on Itelligent Robots andSystems, Edmonton, Ala, Canada, 2-6 Aug 2005. IEEE, 2005: 2578-2585.
����[30] Jones B A, Walker I D. Practical kinematics for real-time implementation of continumrobots[]. IEEE Transactions on Robotics, 2006 22��6���� 1087-1099.
����[31] Jones B A, Walker 1 D. Kinemalies for multsection continwum robots[J] IEEE Transactions onRobotics, 2006, 22��1���� 43-55.
����[32] Mcmahan W. Chitrakaran V. Csencsits M, et al. Field trials and testing of the OctArmcontinuum manipulator[CV/Proceedings 2006 IEEE International Conference on Robotics andAutomation, 2006. ICRA 2006, Orlando, FL, USA, 15-19 May 2006. IEEE, 2006: 2336-2341.
����[33] Buckingham R. Snake am robos[J]. Industrial Robot: An Intermational Journal, 2002, 29��3����242-245.
����[34] Peirs J, Reynaerts D, Van Brusel H. Design of an advanced tool guiding system for roboticsurgery[C]/2003 IEEE Intemational Conference on Robotics and Automation ��Cat. No.03CH37422���� Taipei, Taiwan, China 14-19 Sept. 2003. IEEE, 2003: 26S1-2656.
����[35] ChoiDG, Yi B, Kim W K. Design of a spring backbone micro endoscope��CV/2007 IEE/RSJntemational Conference om Itelligent Robots and Systems, San Diego, CA, USA, 29 Oct-2Now. 2007. IEEE, 2007: 1815-1821.
����[36] Rone W s, Ben-Tzvi P. Mechanics mdeling of multisegment roddriven coninuum robos��J]Joumal of Mechanisms and Robotics, 2014. 6��4���� 41006.
����[37] Xu K, Simaan N. An investigation of the intrinsic force sensing capabilities of continwumrobots[]. IEEE Transactions on Roboties, 2008, 24��3���� 576-587.
����[38] Giorelli M, Renda F. Calisti M, et al. Learning the inverse kinetics of an octopus-likemanipulator in thee-dimensional space[] Bioinspiration and biomimetics, 2015, 10��3���� 35006.
����[39]QiP, Qiu C, Liu H, et al. A novel continwum manipulator design using srially conneteddouble-layer planar springs[J]. IEEE/ASME Transactions on Mechatronics, 2016. 21��3����1281-1292.
����[40]�����档���������ͻ�������Ƽ��˶�ѧ����[].������Һѹ�� 2017, 45��21���� 39-42.
����[41]�����࣬�����ɣ����������ȣ������������ͻ����˵��˶�ѧ���������[].��е����ѧ���� 2010, 19: 1-8.
����[42]��ΰ��Ф�ϣ������࣬�ȣ�һ�������ͳ��������˵�ͨ�����о�����棨[].��е����ӣ�2010, 7: 63-67.
����[43]��ǿ���α�л�졣�����ͻ����˵Ķ���ѧ��ģ�����[].��е������о��� 2012,��02����18-22.
����[4]�����ԣ���ƽ������ADAMS�������ͻ����˽�ģ���˶�����[].������Һѹ�� 2013.,11����163-166.
����[45]���ٽܣ���Ⱦ���������������ͻ��������[��].����ѧѧ������Ȼ��ѧ�빤�̼����棩��2019. 52��04���� 361-367.
����[46] Zhu Z, Cui H, Pochiraju K. Flexible parallel manipulator for nano-, meso-or macro positioningwith multi-degrees of feedom[P].U.S. Patent 11909852. 2008-10-23.
����[47] Bryson C E, Rucker D C Toward parallel continuum manipulaor[CJ/2014 IEEE IntemationalConference on Roboties and Automation ��ICRA���� Hong Kong, China, 31 May-7 June 2014., 2014: 778-785.
����[48] Till J, Bryson C E, Chung s, et al. Eficient computation of multiple coupled Cosserat rodmodels for realtime simulation and control of parallel continuum manipulators[C]/2015 IEEEInternational Conference on Robotics and Automation ICRA���� Seattle WA, USA, 26-30 May2015. IEEE, 2015: 5067-5074.
����[49] Till J, Rucker D C. Elastic sability of cosserat rods and prllel continuum robots[J], IEEETransactions on Robotics, 2017, 33��3���� 718-733.
����[50] Black C B, Till J, Rucker D C. Parallel Continum Robots: Modeling, Analysis, andActuation-Based Force Sensing[]. IEEE Transactions on Robotics, 2017: 1-19.
����[51] Aloi V, Black C, Rucker C. Sifmes Control of Prllel Continuum Robots[C]/IASME 2018Dynamic Systems and Control Conference, American Society of Mechanical Engineers, 2018:V1T-V4T.
����[52] Orekhov A L, Bryson C E, Till J, et al. A surgical parallel continuum manipulator with acable-pen grasper[C]/2015 37th Annual Intemational Conference of the IEEE Engineeringin Medicine and Biology Society ��EMBC���� Milan, Italy, 25-29 Aug. 2015. IEEE, 2015:
����5264. -5267.
����[53] Orekhov A L, Black C B, TillJ, et al. Analysis and validation of a teleoperated surgical prllelcontinuum maipulator[J] IEEE Robotics and Automation Ltters 2016, 1��2���� 828-835.
����[54] Orekhov A L, Aloi V A, Rucker D C. Modeling parallal continwm robots with generalintermediate constraints[C]/2017 IEEE Intermational Conference on Robotics and Automation��ICRA���� Singapore, 29 May-3 June, 2017. IEEE, 2017: 6142-6149.
����[55] Altuzra o, Diez M, Corral J, et al. Kinematic analysis of a continum parallel rol[M]/NewTrends in Mechanism and Machine Science. Cham, Switzerland: Springer, 2017: 173-180.
����[56] Wu G, Shi G, Shi Y. Modeling and analysis of a parallel continwum robot using artificial neuralnetwork[C]/2017 IEEE International Conference on Mechatronics ��ICM���� Churchill, VIC,Australie, 13-15 Feb. 2017. IEEE, 2017: 153-158.
����[57] Wu G, Shi G. Experimental statics calibraion of a mli-constraint parallel contiwum rol[J].Mechanism and Machine Theory, 2019, 136: 72-85.
����[58] Festo. Bionic Tripod 3.0[EB/OL]. htt:/ww.fesw.com/roup/en/cms/1020/.h0.
����[59]�����졣����SolidWorks�����˻������˶����������[D].����������������ѧ��2005:20-25.
����[60]��𩡣ȫ���Թ��߲�ժ��е�۽ṹ�����о���ṹ�Ľ�[D].������������ҵ��ѧ�� 2016:51- 64.
����[61]��𩣬�߹��������������ȡ��������ժ��е��ĩ�˾�̬������̬��Чģ�ͽ�������֤[].ũҵ����ѧ����2018, 5: 23-31.
����[62]����誡����Ի�е�۵��˶�ѧ�Ͷ���ѧ��ģ���Ӿ��η�����[D].�Ϻ��� �Ϻ���ͨ��ѧ��2013: 10-18.
����[63]�����ԡ�������ǻ�ڿ��������˵��˶��������Ż��о�[D].���ݣ��㶫��ҵ��ѧ�� 2013:17-19.
����[64]�����գ�ADAMS���������ʵ��[M].������������ҵ�����磬 2006: 140-154.
����[6S]�칤���ߡ� ANSYS Workbench 17.0����Ԫ���������ŵ���ͨ��ʵս������[M].�������й�ˮ��ˮ������磬 2018: 9-235.
����[6]����ʥ�� ANSYS Workbench 19.0���������빤��ʵ��������ѧ��Ƶ[M].�����������ʵ�����磬 2019: 19-136.
����[67]���ڹ�����֬SOMOS Imagine 8000[EB/OL] htp/w.wt.atics/ei/617.html.
����[68]��Ӣ������3D��ӡ����������������о�[D],������������ͨ��ѧ�� 2017: 73-74.
��л
����ʱ�����ۣ�ת�������о���ʱ�⼴���������ڴ�������Ҫ�ر��л�ҵĵ�ʦ��Ծ�����ڣ�����ʦ������ѧ������ѧ�Ͻ���һ˿�����������̻壬��ѡ�⡢���������ĸ��������ĵ�ָ������������ãʱ���ҽ��м�ʱ��ָ�㣬ʹ���߳��������巽����˳�����ѧҵ��
������л�ҵĸ�ĸ�ͽ������������ڱ���ĬĬ��֧�����ң��������ң������ҵ��κξ������Ƕ���������֧�֣����۴Ӿ����ϻ��Ǿ����ϣ���ĸ���߾��������ܵظ����ṩ������ʹ���ܹ�û�к���֮�ǵ�Ͷ�뵽����ѧϰ��ȥ������ˮԶ�������ǿ�ĺ�ܣ���ͥ��Զ������ů�ıܷ�ۣ��ҵ�ѧҵ�ɾ�Ҳ���������ǵ�һ�ݹ��͡�
������л�ҵ�ͬ���������˴��ͬѧ����������ѧϰ�����и����ṩ���������ھ����ϸ����Һܶ���������ҵ����ڲ��Ͽ�ο�ң�ʹ���ж���ǰ�����ӱ���ͬ�ൽ�о���ͬʵ���ң�������ʵϰ��̫��Ľ����غ�������һ��ȹ������Ĵ�ѧʱ�⣬�Ӿ��ഺ�ĺ�ˮ���ջ�ɳ���ϲ�á�
������ʵ���ҵĿ���ѧϰ�ڼ䣬��ʢ��ʦ����������ʦ����������ʦ���Լ��ƹ��֡��ﴺ���������Ը�Ⱥ����䡢��ᡢ��Ӣ����˼Զ������Ӣ���Ž��壬�������ų��ϡ��Ŵ��������������������֡���»Ȩ������ɽ�����������ź�ǿ������ɽ���������������塢��ӱ��ʦ�ֵܽ��ö������ӹ������İ����ػ����ڴ˶����DZ�ʾ���ĸ�л��
����ʱ����Թ�϶�����ڽ����Ѷȹ����꣬���¶���֪������һ�棬����ɬ���ߵ��������أ���ѧУ��ѧԺ�����ṩ�������ƽ̨������ʹ��ȫ����ɳ������ĸж�ĸУ��ϣ��ĸУԽ��Խ�ã�
��������Ҫ�鿴��ƪ��ҵ���ȫ�ģ�������ϵ�ͷ���ȡ��