24Сʱ���Ķ�������
24Сʱ���Ķ�������
ժҪ
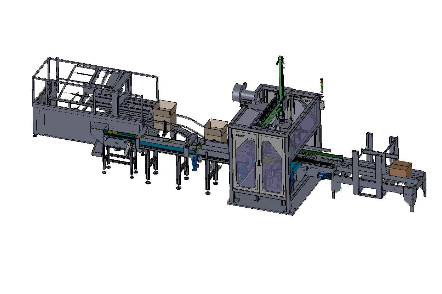
������·������������������ʩ����ʩ�������貼��Χ����ʾװ�ã��Ծ�ʾ�ͱ������˼���ʻԱ������������ҵ�ֳ�������Χ����ʾװ�ÿɲ���·����ʽ��·����ʵ���豸���Զ����ţ���·������Բ��Ա�����������ʩ���ֳ���Ҳ�ɲ���ˮ�����������ʸ�Χ������ʽ����������ʩ�IJ����ʱ�����������ա�
�������Ľ�Ͽ��������ҵ�ļ����������һ�����͵Ŀɲ�װʽΧ��������չ�ɲ�װʽΧ���Զ�ʰ�Ż�����Ƽ��ؼ��������о������ĵ���Ҫ�о��������£�
����1. �����������Χ����ʾװ�ü��Զ����Ż�������ȱ�㣬����ִ�·�������淶�����һ�����͵Ŀɲ�װʽΧ����ʽ������Χ����Ҫ��Χ������Χ���ˡ�Χ������װ���������ɣ����Կ��ٵ�װ�������ڳ��е������ʩ���ij��ϡ�
����2. ��Ͽɲ�װʽΧ���IJ�װ�������̵ķ������з���һ������Χ���Զ�ʰ�Ż���������Ʒ���������Χ��ʰ�Ż���Ҫ��Χ������������Χ���˲�װת�Ͳ�����Χ��������ⲿ����Χ���˲ִ�������Χ�����ִ���������ɣ��ɿ��ٵذ�װ��ʩ�����ϣ�ʵ��ʩ���ֳ��ɲ�װʽΧ���Ŀ��ٲ�������ա�
����3. ���ڷ糡����������ۣ������˿ɲ�װʽΧ���ķ糡����ģ�͡�Χ�����㸲��ѧģ���뻬����ѧģ�ͣ�����������ѧ�������� CFX,�Ż��˿ɲ�ʽΧ���Ľṹ�ߴ���Χ�����ṹ��
����4. ����ͼ�ⷨ������������ۣ����Χ�������벿����Χ�����������������Χ������㶨λ�����ȵ��ͻ������Ż���ơ���� Solidworks ��ģ�� Ansys Workbench ������Ԫ������ʵ��Χ����װת�ͻ�е�ֵ��Ż���ṹ��������ơ�
�����ؼ��ʣ� �ɲ�װʽΧ����Χ��ʰ�Ż���Χ��������⣻��е�֣�����Ԫ����
abstract
����In the construction areas such as highway maintenance, upgrading and expansion, enclosure warning devices should be set to warn and protect pedestrians and drivers, and protect the production site. The common enclosure warning devices can be in the form of road cones, which can realize the automatic layout of equipment, but the barrier of road cones is poor, and personnel can enter and leave the construction site at will; water horse, iron horse, color steel fence and other forms can also be used, but the layout of such facilities is time-consuming, laborious and difficult to recover.
����According to the technical requirements of the cooperative enterprises, this paper proposes a new type of removable fence, and carries out the design and key technology research of the removable fence automatic picking and placing machine. The main contents of this paper are as follows:
����1. Based on the analysis of the advantages and disadvantages of the existing enclosure warning device and automatic placement mechanism, combined with the modern road and bridge maintenance specifications, a new type of removable fence is proposed. The new type of fence is mainly composed of fence cloth, fence pole, fence seat and assembly mechanism, which can be quickly assembled and disassembled, and is suitable for urban and other occasions requiring rapid construction.
����2. Combined with the analysis of the disassembly process of removable fence, the overall design scheme of a new type of fence automatic picking and placing machine is developed. The new type of fence picking and placing machine is mainly composed of fence lifting parts, fence rod disassembly and transfer parts, fence base decoding stack parts, fence pole storage parts, fence base storage parts, etc., which can be quickly installed on the construction vehicle to realize the rapid placement and recycling of removable fences on the construction site.
����3. Based on the theory of wind field fluid analysis, the wind field stress model, overturning mechanical model and sliding mechanical model of detachable fence are established; the structure size and fence base structure of detachable fence are optimized by using fluid dynamics analysis software CFX.
����4. The graphic method and mechanism analysis theory are used to complete the optimization design of typical mechanisms, such as the decoding part of the fence base, the lifting mechanism of the stack layer of the fence base, and the positioning mechanism of the stacking layer of the fence base. Combined with Solidworks modeling and ANSYS Workbench finite element analysis, the optimization and lightweight design of fence disassembly and transfer manipulator are realized.
����Key words: detachable fence; picker; decoder stack; manipulator; finite element analysis
Ŀ¼
����1 ����
����1.1 ���ⱳ��������
������������Դ�ڿ������뱱��·����ͨ������������˾���Ͽ�չ�ĺ�����⣬���ݱ���·����ͨ������������˾�����ľ��弼��Ҫ����ִ�·�������淶����ƿ���һ����ʵ�ֶ�ʩ���ֳ������Զ�Χ���Ĺ�·Χ���Զ�ʰ�Ż���
����1.1.1 �����
�������ٹ�·���ִ����÷�չ�ı�Ȼ������ٹ�·�Ľ��費��������һ�����ҵĽ�ͨ����̶ȣ�Ҳ�����˾��÷�չ������ˮƽ[1].���ٹ�·������Ϊ�ҹ����ý����һ����Ҫ֧����ʩ���ڹ��÷�չ�����ž������ص����ã��Ըĸ↑���������ҹ���·������ 20 ���ʱ�������˷������ 40 ��IJ�����Ľ��̣�������ʵ���˳��������ٺ�����չ[2].2018 ��ĩ��ȫ����·����̴ﵽ 484.65 ����� 1949 ��� 60 �������ٹ�·����� 14.3 �������̾������һλ[3].�ҹ����Ǵ����Ե�����ൺ������š���������ź���۰Ĵ��ŵ�ΰ���·�Ź��̡����ݽ�ͨ������ҵ��չͳ�ƹ���������ͳ�ƣ���ͼ 1.1 ��ʾ��2018 ��ĩ��ĩȫ����·����� 484.65 ������������� 7.31 �����·�ܶ� 50.48 ����/��ƽ��������� 0.76 ����/��ƽ�������·�������475.78 ���ռ��·����� 98.2%,�����Ź�·��������ӵ�ͬʱ���ҹ�����������Ҳ���ִ������[4].

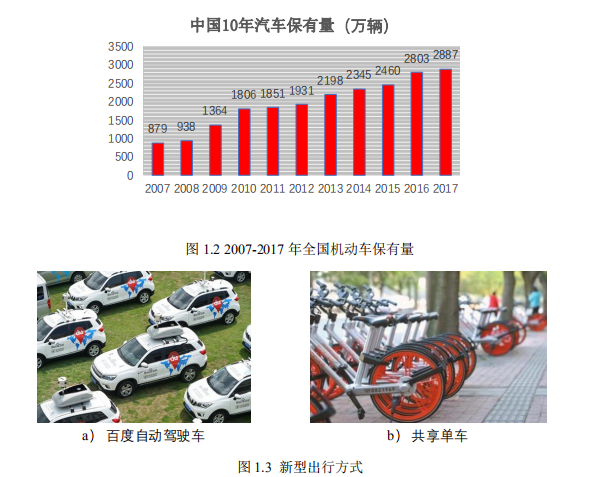
�������ž��õĿ��ٷ�չ���й���Ϊȫ���������������Ĺ���֮һ����ͼ 1.2 ��ʾ���ҹ��������������� 10 ����������������� 2018 ��ף��ҹ����������������Ǵﵽ3.27 ��������˴��ģ�Ļ��������飬��������·�������������˾�ѹ����Ҳֱ�ӵ����������������ʩ�������ж��ν�ͨ�¹��ʵ�����[5].����֮�⣬���ſ�ѧ�����ķ�չ�ͳ��з�ʽ�Ķ���������ͼ 1.3 ��ʾ�Զ���ʻ����������״���ѳ�Ϊ��ͳ�Ĺ�·������ҵ���ܺ��ӵ����⣬��·����������ѹ�����Խ��Խ��
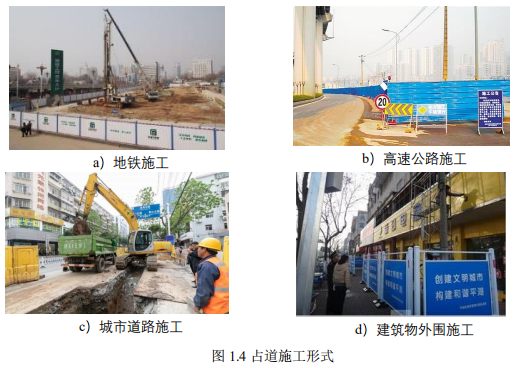
����Ϊ�˱�֤��·�Ľ��������Լ����ǵİ�ȫ������У����йز��ź����������Խ��Խ���ӹ�·�����������⣬�����ǹ�·������ҵ���İ�ȫ״��һֱ����������Ĺ㷺��ע����·����ʩ����ҵ���İ�ȫ���ϲ��Գ�Ϊ��·��Ӫ��ؽ�������һ������[6-7].��֮����ͨ��·���й����ͨ���̽�����ճ�����ʩ���������е�ռ��ʩ���Ե�·��ͨ�����ĸ���Ӱ���Ϊ���أ�ռ��ʩ����ҵ���е�·��ʩ��ͨ��Ҫ���з����ҵ��ʩ����Ա�ڶࡢʩ��ʱ����š�ռ�������ȵ��ص�[8],������ռ��ʩ����ʽ��ͼ 1.4 ��ʾ��ռ��ʩ��ʱ�����ڲ��ֵ�·��գ���·���������仯��������Ҫ���������������� ����Ҳ��Ҫ�ڶ�ʱ���ڲ��ϵط����仯������֮�佻ͨ��ͻ���ӣ����½�ͨӵ�¡���ͨ�¹ʵ�����ķ�����ʩ����ȫ�����ϴ�����ڹ�·ռ��ʩ�������У���ѧ����ȫ��Ч�ĵ�·����������Χ���������Ե�ʮ�ֱ�Ҫ[9].
����1.2 ����ռ��ʩ�����Եķ������о�
����1.2.1 ռ��ʩ��������
����ռ��ʩ����ָ��Ҫռ�õ�·�Ĺ���ʩ������·��������ʩά�ޡ���ͨ������·����������������Լ��̻��Ȼ[10-11].
����ռ��ʩ������ָΪ����ռ��ʩ���ֳ�������Ա���豸�����������˵Ľ�ͨ��ȫ���ý�ͨ��ȫ��ʩΧ�����Ľ�ͨ��������[12].
����ռ��ʩ�������ࣺ
������1�� ����ռ�������ռ��ʩ����Ϊ����ȫռ��ʩ���Ͳ���ռ��ʩ����
������2�� ����ʩ��������λ�ã�ռ��ʩ����Ϊ��·���ϵġ�����ڴ��ĺ��������������������ȣ���ռ��ʩ����
������3�� ����ʩ����ʽ��ռ��ʩ����Ϊ������ʩ�����ƶ�ʩ��������ʽ��
��������ռ��ʱ�䣬ռ��ʩ����Ϊ������ռ��ʩ����ҵ��һ�꼰���ϣ�������ռ��ʩ����ҵ�����������ϣ����������ڣ�������ռ��ʩ����ҵ�����������ڣ�����ʱռ��ʩ����ҵ����������ռ��ʩ������Ҫ��ָ���е�·�ϡ���ʱ����ռ��ʩ����Ŀ����[13-15].
����1.2.2 ռ��ʩ������ͨ�¹ʵ�Ӱ������
������Ϲ����⽻ͨ�¹ʷ������ݣ�ͨ��������֪���ռ��ʩ������ͨ�¹ʵ���Ҫ������[16-29]:
������1��ʩ������δ������صľ�ʾ������־����ռ��ʩ������δ���á����ò�ȫ�������ò��淶��ͨ��־���ǵ��½�ͨ�¹ʵ�һ����Ҫ���أ���ʩ�����������ý�ͨ��ʾ��־����ʹ��ʻԱ��ǰ��Ӧ����߾�����Ӧ�Ը��ӵļ�ʻ����������ʻԱ�ڸ�����ʻʱ��������Ӧ����ֱ�ӳ�ײ��ʩ����ҵ���ڣ��������صĽ�ͨ�¹ʣ���ҹ��ʩ��ʱ�����ڹ��߲��㣬��ʻԱ���Ӿ������̣�ʩ������Ӧ�����þ��з������Ի��߰�װ�о�ʾ�ƵĽ�ͨ��־���Դ�������ռ��ʩ�������¹ʵķ�����
������2����ʻԱΥ�¼�ʻ���й��о������������ͨ�¹�������ֱ��������Լռ 70%,�����ɲ����ļ�ʻϰ�������ռ����Զ��������ԭ��ƣ�ͼ�ʻ����ʻʱ�����˽�̸�������绰�����Ƽ�ʻ�Ȳ�����ʻϰ�߶���ʹ��ʻԱע������ɢ����ȷ�ж�·������ռ��ʩ����������·�����ӣ������ļ�ʻϰ������ֱ�ӳ�Ϊ��ͨ�¹�����
������3���ٶȲ������ Glennon �� Joyner ����������˳������¹��ʹ�ϵ��Ӱ�졣
�����ڸ��о��ɹ��������γ��� 1964 ���� Solomon ��ݵı��棬�ñ����ṩ�˲�ͬƽ�����ٶ�Ӧ���¹����ݣ����ó����ۣ�����֮��ij��ٲ�ֵԽ����������ͨ�¹ʵĿ����Ծ�Խ��
������ʩ�����ĽǶȣ�������������¹����أ�Ϊ����ʩ����ҵ���¹ʵķ����ʣ�Ӧ����ʩ����ҵ��������ȷ���۵Ľ�ͨ��־����Ҫ�ĸ�����ʩ�ͷ�ײ��ʩ��ʵʩ���ٲ���[18].
����1.2.3 ������Χ����ʽ����
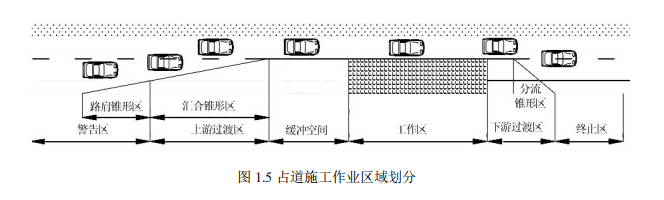
������ռ��ʩ��ʱҪ��չ��ƽ�ͨ������ʩ����ҵ�����г��İ�ȫ����Ҫ��ʩ���ֳ���Χ����·�Ϻͽ�ͨ��ʾ��־������������ʻ����ҵ��һ�㻮��Ϊ������������������������������������ֹ������ͼ 1.5 ��ʾ����������ʩ����ҵ��������Ҫ�ھ��������ñ�Ҫ��ʩ����ʾ�⣬�ڹ���������������ʩ��·���ǽ��ͽ�ͨ�¹�������Ҫ���ֶΣ����ſƼ��Ľ������ڹ������Ⲽ�ŵ�������ʩ��·�ϵ���ʽ������Ҳһֱ�ڸı�ͷḻ���Դ�����Ӧ��ͬ��ʩ������[16].
������1��·
����·��ʩ���ֳ����·��һ�ֳ�����ʾ��ȫ��ʩ[30].��ͼ 1.6 ��ʾ��·�ж��ֲ�ͬ����ʽ������״�ַ���Բ�������ʷ�Ϊ��·������·��·����ɫ��Ҫ�к죬�ƣ������֣���ɫ��Ҫ�������⽻ͨ������·�ڳ���������ͣ���������е��ͽ�����֮��ĸ��뾯ʾ����ɫ��Ҫ�������ڵ�ͣ�����ȹ��߰����ĵط�����ɫ��Ҫ����һЩ����ij��ϣ�·����������и߷�����ϣ��þ�ʾ�����ԡ�·�������õ������ԡ���ײ���ܡ����������ֳ�����ŵ㣬��ʹ�������Ҳ�������ѣ�����ͻ������Ը���Ҫ����ж��ơ�����·���������϶�Ϊ���ϻ���ʹ�������ᡢ���С���ڳ���ײ��ʱ����û���赲������·����ʱ��һ���ļ�������м��϶���˻�����������������ʮ�ֲ

������2��ˮ��Χ��
������ͼ 1.7 ��ʾ��ˮ��Χ����һ���ڲ��пյ�����ϴ�����Ͽ��壬���Ͽ���עˮ�ڣ���ʹ��ʱ��ˮ�������ڹ�������Χ���γ�ˮ���飬��עˮ��ע��һ������ˮ����ֹ���ڷ��������������·����㸲��ˮ��������ϴ�����ʾ����Ҫǿ��·��ˮ��֮��˴�û�м�϶������ԽϺã�������������ϴ��ڽ�������Ͱ�װʱ��ʮ���鷳���������ʱ��©ˮ��ʹ��ʩ������ʪ������������¹ʡ�

������3��ʩ������
����ʩ�������ֳ�Ϊ������ʩ����������ʩ��������������������ͼ 1.8 ��ʾ���Ǿ����������䣬���ӣ���ĥ�⣬��ѹ��Ϳ��һЩ�й����Ƴɣ�����ʩ�������ĸ����뾯ʾ��Ҳ���������������䡢�ֿ⡢ͣ��������ҵ�������������İ�ȫ���������п�ʽ���ƶ��������κε��氲װ�Ϳ�ʹ�ã���Ʒ���Ի��գ�����Ⱦ����ʾЧ���õ��ص㣬���������йҹ�������������֮���������ӣ�ʹ������������������ǿ��
������ˮ����·��ȣ�����������������ǿ����ʾ�Խ���·��ˮ��֮�䣬������Ҳ����Եø��Ɀ�أ��ڲ��źͻ���ʱ����������ֻ��������Ҫ���ý�������ij�����

������4���ʸ�Χ��
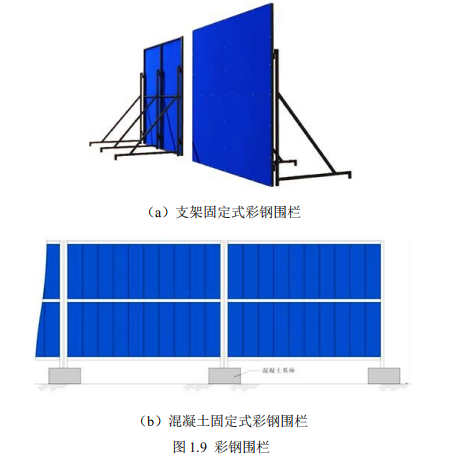
�����ʸ�Χ�������ڳ���ʩ�������ܱߣ����������ˮů�ܵ����衢¥��ʩ�����ֳ�������ͼ 1.9��a����ʾ��֧����ʽ�IJʸ�Χ����Ҫ�ɲʸ���弰֧����ɣ����̶���װ��֧���ϣ��ڰ�װʱ��Ҫ��֧���ϰ�װ����������ȹ�Χ�����Է�ֹΧ�������㸲��֧��һ��Ϊ�����νṹ��������İ�װ����ϴ���ͼ 1.9��b����ʾ�IJʸ�Χ���IJ�����Ҫ�е��氲װ��һ�㶼��ȡ�ڵ����ھ�Ӷ���Ȼ����밲װ����������������������������˿ֱ�ӹ̶��ڵ���ļ��跽ʽ����װ������֮����Ȼ�����������ٽ��вʸ����İ�װ�������ʸ����ͨ���̶�װ�ð�װ����������֮�䣬�������ֲʸ�Χ��������뾯ʾ��������Χ����ʩ����õģ�����ȱ��Ҳ�dz����ԣ������������������װ���ո��ӣ����Ҳ�Dz��Ű�װ���ʱ������ռ������������ڻ��յ�Χ����ʽ��
����1.3 ʩ��·���Զ��շŵ�ϵͳ�������о��ſ�
����1.3.1 ʩ��·���Զ��շŵ�ϵͳ�����о��ſ�
����1.3.2 ʩ��·���Զ��շŵ�ϵͳ�����о��ſ�
����1.4 ������Ҫ�о�����
����2 Χ��ʰ�Ż����������
����2.1 �ɲ�ʽΧ��
����2.1.1 ����Χ���ľ�����
����2.1.2 ռ��ʩ����Χ���Ĺ�������
����2.1.3 �ɲ�ʽΧ�����
����2.1.4 �ɲ�ʽΧ�����ŵ�
����2.1.5 �ɲ�ʽΧ����װ����
����2.2 Χ��ʰ�Ż�������Ʒ���
����2.2.1 Χ��ʰ�Ż������ԭ��
����2.2.2 Χ��ʰ�Ż���Ƶļ���Ҫ��
����2.2.3 Χ��ʰ�Ż��������
����2.2.4 Χ��ʰ�Ź�������
����2.3 Χ��ʰ����������
����2.3.1 Χ��ʰ�������������ԭ��
����2.4 Χ���˲ִ�ϵͳ
����2.4.1 Χ���˲ִ�ϵͳ�����ԭ��
����2.5.2 Χ���˲ִ�ϵͳ�Ĺ�������
����2.6 Χ�������ִ�ϵͳ
����2.6.1 Χ�������ִ�ϵͳ����빤��ԭ��
����2.6.2 ����������������
����2.6.3 ����������
����2.7 ������
����3 Χ���ܷ�����������Χ�������
����3.1 Χ������������ṹ�������
����3.1.1 �����غ�����
����3.1.2 ���غ�����
����3.1.3 ��ͬ��Χ���������
����3.2 ����������ԭ�����������
����3.2.1 CFX ����
����3.2.1 ���������ʽ
����3.3 ���������
����3.4 ���������
����3.4.1 �߽�����
����3.4.2 ����������
����3.5 Χ��֧�Žṹ���
����3.5.1 ������������
����3.5.2 Χ������У��
����3.5.3 ���������
����3.6 ������
����4 Χ�������͵Ľ��벿�����
����4.1 Χ�����Ķ��ͽṹ
����4.2 Χ�������͵Ľ��뷽��ѡ��
����4.2.1 ֱ�����������ϵͳ
����4.2.2 ��������
����4.3 Χ�������벿�������ԭ��
����4.3.1 Χ�������벿�������
����4.3.2 Χ�������벿����������
����4.4 Χ�����������װ�����
����4.4.1 Χ�����������װ�����
����4.4.2 Χ�����������װ�ù���ԭ��
����4.4.3 ����װ�ô�������ѡ��
����4.5 Χ������㶨λ�������
����4.5.1 Χ������㶨λ�������
����4.5.2 Χ������㶨λ��������ԭ��
����4.5.3 �������
����4.6 ������
����5 ��װת�ͻ�е������Ԫ����
����5.1 ����Ԫ�������۸���
����5.1.1 ����Ԫ������ԭ��
����5.1.2 ����Ԫ��������
����5.1.4 Ansys Workbench �������
����5.2 ��װת�ͻ�е������Ԫ����ǰ����
����5.2.1 ��װת�ͻ�е�ֻ����ṹ
����5.2.2 ��е�ַ���ģ�ͼ�
����5.2.3 �ṹ���������趨
����5.2.4 ����
����5.2.5 �߽���������
����5.3 ģ̬����������
����5.4 ����ѧ����������
����5.5 ������������
����5.6 ������
����
�������Ľ�Ͽ��������ҵ�ļ���������Դ���е�·ʩ����������ʩ����ʩ��ʱ��̡����������ص��ص㣬��չ�ɲ�װʽΧ����Χ���Զ�ʰ�Ż���Ƽ��ؼ��������о���ȡ�����½��ۣ�
����1. ����ִ�·�������淶���з���һ�����͵Ŀɲ�װʽΧ��������Χ����Ҫ��Χ������Χ���ˡ�Χ������װ���������ɣ����Կ��ٵ�װ�������ڳ��е������ʩ���ij��ϡ�Χ���ĸ߶�Ϊ 1600mm,����Χ���ij����� 2500-3200mm ��Χ�ɵ���
����2. �з�һ�����͵Ŀɲ�ʽΧ���Զ�ʰ�Ż�������Χ��ʰ�Ż���Ҫ��Χ������������Χ���˲�װת�Ͳ�����Χ��������ⲿ����Χ���˲ִ�������Χ�����ִ���������ɣ��ɿ��ٵذ�װ��ʩ�����ϣ�ʵ��ʩ���ֳ��ɲ�װʽΧ���Ŀ��ٲ�������ա�Χ�����Զ���������ٶ� 45 ��/���ӣ����յ�����ٶ�Ϊ 28 ��/���ӡ�
����3. ���ڷ糡�������ۺ�������ѧ�������� CFX �ķ������Ż��˿ɲ�ʽΧ���Ľṹ�ߴ���Χ�����ṹ���Կ���ռ������� 50%Ϊ����������ȷ����Χ������ 90mm ���Ŀ�������
����4. �������۷����� Ansys ����Ԫ����������Ż���Χ�������벿����Χ�����������������Χ������㶨λ�����ȵ��ͻ��������Χ���˲�װת�ͻ�е�ֵ��Ż���ṹ��������ơ�
��������Ŀǰ����ɿɲ�ʽΧ���Զ�ʰ�Ż���ǰ����ƣ����ڿ���Ҫ���йؼ��������Ż������ʵ���о����з��ɲ�ʽΧ���Զ�ʰ�Ż��������ƹ�Ӧ��
���������
����[1] ����ӹ�����塣���ٹ�·�Է�չ���õ�ս������[J].�й���·ѧ����1993��04����52-59.
����[2] ���������ĸ↑�� 40 ���й�����ҵ��չ��չ��[J].�й���ͨ���ã�2018,32��04����3-17.
����[3] ������2018 �꽻ͨ������ҵ�����ݣ���·���䲿�֣�[J].����������2019��04����85-87.
����[4] ���塣 "��"����ͨ����� 2018"��"��"Ч"��������[J]. ���侭�����磬 2019��02����76-79.
����[5] ���й���·ѧ�����༭�����й���������ѧ���о�����·2017[J].�й���·ѧ����2017,30��06����1-197.
����[6] Causes and Prevention Measures of Secondary Rear-End Accidents in the Rescue of HighwayTraffic Accidents[J] . Qing-yuan Yu. Procedia Engineering . 2013
����[7] �ְ��� ���ٹ�·�½���ͨ����ʩ������ͨ��֯����Ż�[D].���ϴ�ѧ��2019.
����[8] ���Ļᡣ ���ٹ�·��ͨ�¹��ֳ�������ȫ����о�[D].���ִ�ѧ 2010[9] ������� ��·��ҵ����ͨ�¹������̶�Ӱ�����ط���ģ���о�[D].������ͨ��ѧ��2016.
����[10]Justin F. Jackson. Roads to American Empire: U.S. Military Public Works and CapitalistTransitions, 1898-1934.[J]. Journal of Historical Sociology,2020,33��1����
����[11]Xianyong Zhang,Shifeng Huang,Shenjun Yang,Renfang Tu,Lianghai Jin,Giuseppe D'Aniello.Safety Assessment in Road Construction Work System Based on Group AHP-PCA[J].Mathematical Problems in Engineering,2020,2020.
����[12]��ʥ�� ���ٹ�·������ʩ����ҵ��ҹ����ʱ��ͨ��ȫ��ʩ�����о�[D].������ѧ��2015.
����[13]�����ס� ��·��������ҵ����ͨ��ȫ��������ʩ�����о�[D].��������ҵ��ѧ��2007.
����[14]Jack Koci,Roy C. Sidle,Anne E. Kinsey-Henderson,Rebecca Bartley,Scott N. Wilkinson,Aaron A.
����Hawdon,Ben Jarihani,Christian H. Roth,Luke Hogarth. Effect of reduced grazing pressure onsediment and nutrient yields in savanna rangeland streams draining to the Great Barrier Reef[J].
����Journal of Hydrology,2020,582.
����[15]�̾��������£���������·�ڷŻ��ṹ���[J].������ѧѧ����2019,40��03����20-22.
����[16]Lau Georgina,Gabbe Belinda J,Collie Alex,Ponsford Jennie,Ameratunga Shanthi,Cameron PeterA,Harrison James E,Giummarra Melita J. The Association Between Fault Attribution and WorkParticipation After Road Traffic Injury: A Registry-Based Observational Study.[J]. Journal ofoccupational rehabilitation,2019.
����[17]������������ˣ����ض���Ԭ������ ���ٹ�·��ͨ�¹ʾ�Ԯʱ���������ʹ�ϵģ���о�[J].��ͨ��Ϣ�밲ȫ�� 2015��04��
����[18]Pedro Cesar Lopes Gerum,Andrew Reed Benton,Melike Baykal-Gürsoy. Traffic density oncorridors subject to incidents: models for long-term congestion management[J]. EURO Journal onTransportation and Logistics,2019,8��3-4����
����[19]Fort E,Gadegbeku B,Gat E,Pelissier C,Hours M,Charbotel B. Working conditions and riskexposure of employees whose occupations require driving on public roads - Factorial analysis andclassification.[J]. Accident; analysis and prevention,2019,131.
����[20]Gray Shannon E,Collie Alex. Work absence following road traffic crash in Victoria, Australia: Apopulation-based study.[J]. Injury,2019,50��7����
����[21]Olanrewaju A. Apampa. Environmental benefits of corn cob ash in lateritic soil cementstabilization for road works[J]. African Journal of Science, Technology, Innovation andDevelopment,2019,11��4����
����[22]�˧������һ��������������������ϣ���� ��ͨ����Լ���µĵ�·��ͨ��ȫϵͳ�ȶ��Է���[J].�й���·ѧ���� 2015��01��
����[23]�����£����ı룬���衣 ���ڸ��ٹ�··���Զ��շŵĿ���ϵͳ[J].��������ͨ�Ƽ��� 2014��07��
����[24]L S R Supriadi,B Wisesatama,Y Latief. Development of work breakdown structure ��WBS��dictionary for road construction works[J]. IOP Conference Series: Earth and EnvironmentalScience,2018,195��1����
����[25]Livi Stefano,Theodorou Annalisa,Rullo Marika,Cinque Luigi,Alessandri Guido. The rocky road toprosocial behavior at work: The role of positivity and organizational socialization in preventinginterpersonal strain.[J]. PloS one,2018,13��3����
����[26]��־ǿ�� ����ռ��ʩ����·�ν�ͨӰ����о�[J]. ���ɹŹ�·�����䣬 2013��03����70-71.
����[27]���Ҹ� ���� ��Ȩ�� ռ��ʩ����ͨ��֯����ͨ�����淶�Բ��о�--��������Ϊ��[J]. ��·��ͨ�밲ȫ�� 2014��06����15-20.
����[28]��� ���ľ��� ���ٹ�·������ҵ���г�Σ���Է����밲ȫ��ƶԲ��о�[J]. ��ͨ������2010��21����108-112.
����[29]��ӱ�塣 ����ռ��ʩ�������µĽ�ͨ���估��������Ӧ���о�[J]. �й�����˶ʿѧλ����ȫ�����ݿ⣬ 2017��07����87-87.
����[30]���䣬���ģ������������ͻ�����Сΰ�� ·Ͷ���Զ�����ϵͳ������[J].��ͨ��Ϣ�밲ȫ�� 2017��02��
����[31]����ά�� ��ͨ·�Զ��շ�ϵͳ��������о�[D].�Ͼ�������ѧ 2013
����[32]�������� һ��·�Զ����պͰڷ�װ��[P].�й�ר����CN206752351U,
����[33]�ƽ��������ң���С������ƽ��ŷ�汦�����Ӻ��������£�����ʯ��Ž�˧����ˣ����Σ���������ʷ��������� ·�Զ��ڷ������װ��[P].�й�ר����CN106930205A,
����[34]S.A. Velinsky,W.A. White. Automated machine for highway cone placement and retrieval[J] . Int.J. of Heavy Vehicle Systems . 2004 ��2��
����[35]LEE Y C,WHITE W A,VELINSKY S A. Integration and testing of a multistack automated conemachine 2004
����[36]Ҷ�Dz��� ��ͨ·�շ����������붯̬�����о�[D].�Ͼ�������ѧ 2015[37]���ƽѩ��������ϣ������Σ�ԬҰ���α��� ���ٹ�·��ͨ���ջ��������[J].����һ�廯�� 2017��10��
����[38]Ҷ�Dz������������������� ABAQUS ��·�н�����˲̬��Ӧ����[J].��е�������Զ�����2015,44��06����113-115.
����[39]���ܳ��������䣬�ⳬ�١� ���ٹ�·�¹��ֳ�����·���賵����ϵͳ�о�[J].��ͨ��Ϣ�밲ȫ�� 2017��03��[40]��Ԫ襡� ��ͨ�Զ�ʰ�Ż�������о�[D].������ѧ��2013.
����[41]���찮�� ij��·ʰ�Ż�е���˶�����������о�[D].�Ͼ�������ѧ��2013.��ͨ·������
����[42]���������º���������죬�����꣬�����棬֣�ֳ��� ��ͨ����ר����������[J].���ϿƼ���2016��12��
����[43]�����ɣ����������찮�� ���� MATLAB ��·ʰ�Ż������˶������о�[J].��е�������Զ�����2014��01��
����[44]�����£������������ƣ������Ρ� ��ͨ���ջ�е�ְڶ������о������[J].ר�������� 2013��09��
����[45]���䣬�������������ܳ���·�Զ�Ͷ�ջ�е�ֹ켣�滮������ϵͳ���[J].�й����̻�еѧ����2017,15��04����283-290.
����[46]¬�ơ� �ṹ�Ƚ��ۺ��Ż���Ʒ����о������ڽ�ͨ·�շų��е�Ӧ��[D].�Ͼ�������ѧ��2014.
����[47]���ܳ����������뺺�����䣬�ⳬ�١� ��ͨ�¹��ֳ�����·��������������о�[J].�й����̻�еѧ���� 2016��03��
����[48]����Ȩ���⺣��Ҷ����������ɽ������ Kalman �˲����ƶ���е�۶�̬ץȡ�о�[J].���繤�̣�2019,36��08����851-856.
����[49]Ԭ�Ρ� ��е�ṹ�����[J]. ���տ�Է�� 2008��02����57-57.
����[50]�������� ���幰�۵����ܽṹ�������ٳ����㼼���������ѹ����[D].���������Ƽ���ѧ��2017.
����[51]���˻��� �Զ�����������������ؼ������������������[D].��ɽ��ѧ��2015.
����[52]������ �ռ���ܴ�����ʱ��̨����ط�������[D].��������ҵ��ѧ��2014.
����[53]�ν����� ����������������³��߲㽨���ķ������ֵģ��[D].�����ѧ��2013.
����[54]��� ���ı��� ֱ����������˼�������Ӧ�ý���[J]. �ŷ����ƣ� 2008��09����76-79.
����[55]Manh Dung Ngo,Nguyen Thanh Phuong,Vo Hoang Duy,Sang Bong Kim. Robust Control ofWelding Robot for Tracking a Rectangular Welding Line[J]. SAGE Publishing,2008,3��3����
����[56]������ �˼Ҿ� ���� ������ �����ơ� ����ִ��������롢���ֱ�����������ϵͳ���[J]. ����ҵ�Զ����� 2019��04����154-157.
����[57]�Ըա� ֱ������ʽ��ש������������о�[J]. ���缼���� 2015��6����2-2.
����[58]Q. Liu. AUTOMATED LOGISTICS MANAGEMENT AND DISTRIBUTION BASED ON RFIDPOSITIONING TECHNOLOGY[J]. Begell House Inc.,2020,79��1����
����[59]Lukas Polten,Simon Emde. Scheduling automated guided vehicles in very narrow aislewarehouses[J]. Elsevier Ltd,2020.
����[60]����ϡ� �Զ�������ֿ�[J]. �й����ˣ� 2007��09����56-57.
����[61]�ߵ��� ������ ���� PLC ������ֿ����ϵͳ�����[J]. Ӧ����Դ������ 2012��01����49-52.
����[62]Apex Supply Chain Technologies; Apex Self-Serve Automated Lockers Help Warehouse TeamsWork Faster and Smarter[J]. NewsRx,2020.
����[63]Snowflake Inc.; Snowflake and Next Pathway Announce a Strategic Partnership to AutomateMigrations From Legacy Data Warehouses to Snowflake[J]. NewsRx,2019.
����[64]̷�㡣 ����������һ����ʱ���ĸ��� �Զ�������ֿ�[J]. �г��ܿ������������� 2008��05����32-33.
����[65]�ּҹ⡣ ���Ӳ�ƷӲ����Ƶ�̽��[J]. ���Ӽ������������̣� 2015��20����137-137.
����[66]���������������˷ǣ���С������־�������ǻۡ����ٻ����˷ּ�ϵͳ�����Ӿ��������о�[J].��װ��ʳƷ��е��2014,32��01����28-31.
����[67] F. Basile,P. Chiacchio,E. Di Marino. An auction-based approach to control automated warehousesusing smart vehicles[J]. Elsevier Ltd,2019,90.
����[68]Hiroyuki Yuba,Solvi Arnold,Kimitoshi Yamazaki. Unfolding of a rectangular cloth fromunarranged starting shapes by a Dual-Armed robot with a mechanism for managing recognitionerror and uncertainty[J]. Taylor & Francis,2017,31��10��
����[69]�����ޡ� ���� SolidWorks ��ֱ�����������ϵ�л��������ϵͳ���о��뿪��[J]. �й�����˶ʿѧλ����ȫ�����ݿ⣬ 2016��02����67-67.
����[70]���� �°��� ����ï�� ֱ����������˿���ϵͳ������[J]. �Ṥ��е�� 2010��04����74-76.
����[71]Xiu Min Shi,Wei Jie Fei,San Peng Deng. The Research of Circular Interpolation Motion ControlBased on Rectangular Coordinate Robot[J]. Trans Tech Publications Ltd,2016,4283[72]���ı��� �ٸ���ֱ���������������������ҵ�IJ���Ӧ��[J]. �ŷ����ƣ� 2008��10����73-75.
����[73]Manh Dung Ngo,Vo Hoang Duy,Nguyen Thanh Phuong,Sang Bong Kim. Robust Control ofWelding Robot for Tracking a Rectangular Welding Line[J]. SAGE Publications,2006,3��3����
����[74]��������ANSYS ����Ԫ���������뷢չ[J].ɽ���Ƽ���2008��04����65-66+68.
����[75]�콨���� ����ʽ���������е�ֵ�����������ṹ�Ż�[D].���ݴ�ѧ��2016.
����[76]�·�衡� ����ʽ��е�ֶ���̬���Է������ṹ�Ż�[D].���ϴ�ѧ��2014.
����[77]������죬���ijɣ����л������������ṹ������Ԫ�������Ż� [J].���켼���������2005��02����50-53.
��л
����������˹��������ҹ��������ѧ�������أ��ڼ�������ˡ����²�����˿��и�������β��裬���н���������������ʦ���ѣ�����ο�塣
������л��ʦ���������֮���������Ѫ���������Ϊ��ĸ������ʹ��������أ���ǿ��ǣ�����ӯ��˼�룬�������ʶ���գ�Ϊ����������ν�����졣���ʦ����ʱ�ո������࣬����ʵ�ѣ�������ȡ������ʵ�࣬�����ֹۡ���ʦ�ڼ䣬�̻壬�������£���ʱʱ������ǽ̵������Ժ������У����˱�Ҫ���ؿ��ס��������Ͻ���ְ��
������л��������������ʦ���ڷ������о������������У�һ˿����������ҵҵΪ���ǽ�����⣬�ػ����ǵ����
������лһ�����Ҷȹ��о���������ѧ���ĵ�ʦ�֡�ʦ�ܣ���������һ�����֣���ѧҵ�Ϲ�ͬ������Ϊ���ʱ�����ʡ�
������л���ļ����ĸ�λר�ҽ��ڣ�лл��������ı����飬ʹ��ƪ���ĸ����������顣
������лѧУ���ṤѧԺѧԺΪ�����ṩ���õ�ѧϰ�������걸��������ʩ��ʹ���ܹ����˳�������̴�ȹ��ҵ������ѧ��ѧ֮�ã�
��������Ҫ�鿴��ƪ��ҵ���ȫ�ģ�������ϵ�ͷ���ȡ��