24Сʱ���Ķ�������
24Сʱ���Ķ�������
ժҪ
�������ڴ��Բ��Ͽ���������͵ֿ����غɵ������ϲ�ҿ�������Զ���ڿ�ѹ���������ʵ�����������зdz��������顣������ʯ�ĺϳ�ԭ��Ҷ��ʯ���Ҷ��ʯ��������������������������̰����Ÿ�ǿ�ȡ��ط۳���Ⱦ�Ĺ���������ʵ���������̵Ļ�е�����Զ����ܹ��������Ч�ʡ�Ϊ�˽�����Բ��������д��ڵ����⣬ʵ���Զ��������ܻ����������������һ���ڳ�ʽץȡ�Ļ�е�ֹ��ͣ�������ָ�ṹ�����Ż�������̽���˲�ͬ�ն�ƥ�����ָ�ǹ�����������Ӵ���ײ���ɣ������о��������£�
������������ͨ������Ҷ��ʯ����ԭ�ϵ���״���������Ժ���Ч�����ռ�ȷ�������أ�����˾���ָ��Эͬ�����Ļ�е�ֹ��ͣ�����������ڱ��ڴ��Բ��ϵ��ڳ�ʽ�����ϻ�е������ϵͳ��Ȼ���ڻ�е�����幹�ͻ����ϣ��Բ��õ����������ס���ѹ�������ס��ŷ��綯�Ƹ�Ϊ����ģʽ�������е�ֽṹ����Ӧ�Ŀ���ϵͳ�����˶Աȷ����������������������ṹ����Ӧ���ϡ�
����Ϊ��̽����е�ֵ����Ź����Լ��˶���������С��е����צץȡ�����ij���ٶȣ�����ƵĻ�е�ֽṹ������ϵΪ���������˲���Ϊ�������Բ�������צ�����˶���ƽ���ٶȶ�������צ�Ӵ���ij���ٶ�ΪĿ�꣬�����Ż�ģ�ͣ������Ŵ��㷨����Ѱ�ż��㡣
����ͨ���Ի�е�ֽṹ���������Ż�����С����ָָ��Ӵ�������ij���ٶȣ������˻�е��ץȡ����������д��Բ�������ĸ��ʣ����������ҵ�ɿ��ԡ�
����Ϊ��Ѱ����Ӧ�ڱ�����������ڳ�ʽץȡ��е����ָ�ǹ��ͺն�ƥ��ģ�ͣ�̽��ץȡ���̵ĽӴ�-��ײ���ɣ������������ָ�������ָ��ϵ���ָָ�˽ṹ�������˸�����ָ����������ָ��IJ�ͬ"����"����ͣ����о��ͷ����˲�ͬ���͵ĽӴ��նȱ仯���ɡ����� Hypermesh ���������ɽ�ģ�ķ����������˻�е��ָ���㲿������Ԫģ�ͣ�ͨ�� LS-propost ����������Ԫģ��ʩ����Ӧ��Լ�����غɡ��Ӵ����͵ȣ������к���������õ�����������Ӵ���ײ�����е�Ӧ����Ӧ����ͼ�����Դ�Ϊ��������ƺ��Ż���ָ�Ǵ���ģ�͡�
����Ϊ����֤��е��ϵͳ��ʵ�ʹ������ܣ���������˻�е��ϵͳ��ʵ��ƽ̨������˿���ϵͳ�����巽�������Ը�������ģ���Ӳ���ͺŽ��з�����ѡ��ͨ�� trio ���ƿ����˶�ģ�������ƺͱ�̣�����չ���˶�����ʵ���о���֤���˱���������ڳ�ʽ�����ϻ�е������ṹ��������Ʋ����ĺ����ԡ�
������������о��ɹ���Ϊ������������������Ի�е�ֵ�����ṩ�¹��ͣ����������뷽��������̽����ʵ����Ϊ�ƶ����������жԱ����������ҵ���Զ��������ܻ��ṩ������
�����ؼ������ڳ�ʽ��е�֣�������������˶���ģ���ṹ�Ż����������
ABSTRACT
����Because of their poor impact resistance and resistance to dynamic loads, Brittle materialsare very easy to break in the actual production process. Artificial diamond's synthetic rawmaterials are pyrophyllite stone and pyrophyllite ring ��both of them are fragile workpieces����
����The production process of diamond is accompanied by high intensity and heavy dust pollutionworking environment. To solve the above problems, we need to realize the mechanization andautomation of the production process of brittle materials. Therefore, we design a newmechanical hand structure of internal brace grab and optimize the finger structure. In addition,we discuss the contact collision law between finger bone configuration and fragile workpieceswith different stiffness matching. The specific research contents are as follows:
����In this paper, the manipulator configuration with the characteristics of finger-palmcoordination is proposed by analyzing the shape, material characteristics and effectiveworking space of raw materials for pyrophyllite production. The overall configuration ofinternal brace loading and unloading manipulator suitable for thin-walled brittle material isdesigned On the basis of the overall configuration of the manipulator, the three kinds ofmanipulator structures and the corresponding control system which adopt the drive mode ofisokinetic push cylinder, isobaric push cylinder and servo electric push rod are compared andanalyzed.
����So as to explore the optimal configuration of the manipulator and motion parameters,reduce the impact of the manipulator hand grab workpiece speed, based on the design of themanipulator structure relationship, connecting rod parameter as a variable, not to reduce theaverage gripper overall movement speed and reduce the impact of the gripper contact point asthe goal, the optimization model is established, the optimization procedure using geneticalgorithm to calculate.Reduces the impact speed of the fingertips in contact with the fragileworkpieces and improves the reliability of the workpiece operations.
����The finger end structure of soft finger and rigid finger is proposed, and different "musclebone" structures are established, in order to find the matching model of finger bone structureand stiffness of inner brace grab manipulator suitable for thin-walled and fragile workpieces,and the contact-collision law of grab process was explored. A finite element model ofmechanical finger end workpieces is established, and the stress and strain cloud diagram ofannular fragile workpieces during contact collision is obtained by simulation calculation. Themethod of integrated modeling is adopted by Hypermesh and other software. Based on this, a finger bone matching model is designed and optimized.
����So as to verify the actual performance of the manipulator system, the experimentalplatform of the manipulator system is built, and the overall scheme of the control system isdesigned. We design and program the motion program by trio control card, and carry out theexperimental study of its motion characteristics, it is proved that the overall structure schemeand design parameters of the thin-walled fragile inner braced loading and unloadingmanipulator are reasonable.
����The research results of this paper will provide a new configuration for the design offlexible manipulator for loading and unloading thin-walled fragile parts, and discuss andpractice the new theory and method. It provides the basis for promoting the automation andintelligence of thin-walled fragile parts in the production process.
����Keywords: Inner braced manipulator; Thin-walled fragile workpieces; Motion modeling;Structural optimization; Impact simulation

Ŀ¼
������һ�� ����
����1.1 �����о��ı���������
������������Դ�ڹ�����Ȼ��ѧ����������Ŀ"����������ڳ�ʽ������ҵ��˳��е�ָն�-����ƥ��������˶������о�"��52075500��������ʡ�Ƽ������ص���Ŀ"���������������װ����˳��е��ϵͳ�з�"��202102210086����
�������Բ��ϴ������ƻ�������ֻ���ּ�С�ĵ��Ա��Σ������������Ա��Σ�����伫��ǿ��һ�㲻�������Լ��ޣ��Ҵ��Բ��ϵֿ����غɻ����������ϲ��������Զ���ڿ�ѹ������ͨ�������������ԡ����Բ������ճ��������洦�ɼ���Ӧ�ü�Ϊ�㷺�����粣�����մɵȣ������ڰ�ȫ��������ռ����Ҫ��λ�����մ�װ�ס����������¡����������ȡ���е����Ա���������ĸ���ץȡ����ҵ�������ڷǽ������ϼӹ���ʳƷ��װ�������Ṥ��Ʒ�ļӹ����Լ��ڶ���ҵ���������̵Ⱦ��кܴ��Ӧ������[1-2].���ܻ�е�ֵij��ֲ���������Ͷ������ӿ��˲�Ʒ�������ٶȣ����һ�е�ְ��ռȶ��ij�����в�������Ʒ�ľ���Ҳ�õ����ʵ�����[3].
�����Ծ���ս�������������ʯ�ϳɹ���Ϊ����������ʯ�ϳ�ԭ��Ҷ��ʯ���������ͼ 1-1 ��ʾ����ԭ�ϼ���Ʒ������������й�������ʯ�IJ����Ѿ�ռȫ����ܵ� 80%����[4],��������Ҷ��ʯ�������Ǹ�ǿ�ȡ��ط۳���Ⱦ���ظ��������Ѿ����������µĹ��˾�ҵ����в����ҵ��������ת�����û�е�����Ϻ�ת�˱���������������Ʒ�������̵ĸ�����ҵҪ��
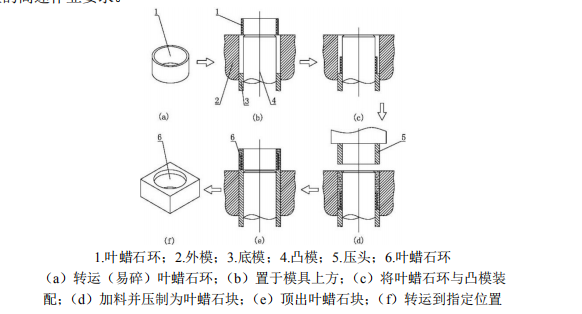
����Ҷ��ʯ���Ǻϳ�������ʯ��ԭ�ϣ������豸ͨ������Һѹ��������Ҷ��ʯ�顣ͼ1-1 ��ʾ��Ҷ��ʯ��IJ������̡�ͼ 1-1 ��a��ΪҶ��ʯ������������ģ����Ƚ���ת����ģ���Ϸ���ͼ 1-1 ��b������Ȼ��װ����ģ�ߵ�ģ�ϣ�ͼ 1-1 ��c�������ڴ�֮��Ҷ��ʯ��ĩ����䵽ģ��ǻ�У�Һѹ����Ҷ��ʯ���ͷ���ѹ�Ƴ�Ҷ��ʯѹ�飨ͼ 1-1 ��d������Ҷ��ʯѹ��������Σ����ھ���Ҷ��ʯ�����ھ���Сһ�£���ͼ 1-1 ��f����ʾ��Ȼ�����ÿ��������ƶ��ĵ�ģ��Ҷ��ʯѹ���Ƴ�����ͼ 1-1 ��e����ʾ����������Ҷ��ʯѹ��ת�Ƶ�ָ��λ�á�
����Ŀǰ�����˹�����Ҷ��ʯ��Ĺ����У�����ͨ��˫����סר�ù��ߣ��������Ҷ��ʯ����ץȡ����װ��ת�ƹ���������Ч�ʷdz����¡�Ϊ�����ҵЧ�ʣ����з���Ӧ�Ļ�е��ϵͳ�������Ӧ�IJ������̡�
�����ڻ�е��ץȡ���������ҵ�����У��������ǿ�����������������˻�е���������֮��ĽӴ�Ӧ���������ڱ����������ҵ��ĩ��ִ�������ڽϴ�ļ���ƿ�������磺
��������ץȡ�����У�ץȡ��ָ�뱡�������֮�������������ܵ����������������װ ������У���е���������֮���"Ӳ"ʩ��������������������⡣����о��ͽ�����������������ҵ��е��ϵͳ���ٵļ������⣬������Ҫ�����ۺ�Ӧ�ü�ֵ��
����1.2 �������е�ַ�չ��״
����1.2.1 ���������ϻ�е�ֺ�ĩ��ִ������չ��״
������Ի�е����������ҵ�����������˾�з��������������ߵ������ϻ�е��ϵͳ��������ʿ ABB ��˾���¹� Muller Weingarten ��˾��Honsberg ��˾����� ASEA ��˾�ȶ��������ϻ�е�ֽ�����ϵ���о�[5],���� ABB ��˾������ IRB ϵ���Զ����ϻ�е�֣���ͼ 1-2 ��ʾ���¹� Muller Weingarten ��˾���Ƶ� KR-P ϵ�г�ѹ��е��[6],��ͼ 1-3��ʾ��

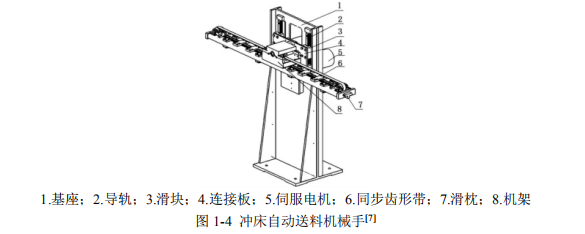
�������й����������Ҳ��չ���ڶ���о����绪�пƼ���ѧ������ΰ���з�����Գ崲���Զ������ϻ�е��ϵͳ����ϵͳ���ô������� PLC ���ƣ�ʵ�����������̵��Զ������������˹��ϼ�ر��������˫�ϼ��ȹ���[7],�ܴ�̶�������˳�ѹ�ӹ���ҵ������Ч�ʣ��ṹ��ͼ��ͼ 1-4 ��ʾ�����Ǹ��Զ����ϻ�е�ֽ�������С�ͳ�ѹ������Ӧ�÷�Χ���о����ԡ�
�����Ϻ�ͨ�����������������������������細������װ���̵��Զ�������ϵͳ����ϵͳ����װ���������̵Ĵ�ֱ����װ�ã�װ���������̵ĺ�������װ�ã����������Ͻ����ƶ�������װװ���Լ������������ȡ�����ϵͳ��Ҫ�����Ƭ�������� 20kg�ķ細����������������[8],ͨ������ץȡ���鲣��������Ҷ��ʯ�������ṹ�������ԣ�������������Ƶ�����ץȡ��Ʒ�����
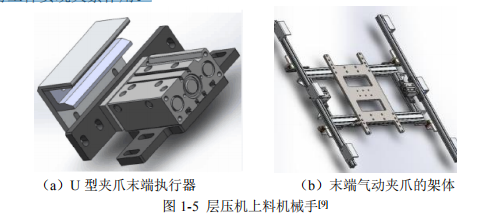
�����ӱ��Ƽ���ѧ���ƵIJ�ѹ�����ϻ�е��ϵͳ��ͼ 1-5 ��ʾ����ϵͳ�����Ӿ�������������Ч���̫���ܵ���������װ��ϵ���ѹǰ��ȫ�����˹���[9],��ĩ��ִ������������������ U �ͼ�צ����ͼ 1-5��a����ʾ����������צ���ڹ�ҵ�������г��������ϻ�е�ֽṹ����ֻ��ʵ�����̫���ܵ������ض��ṹ��ץȡ����������ץȡ������Ҳ����Ҫ�Թ���ʵ�ּн����á�
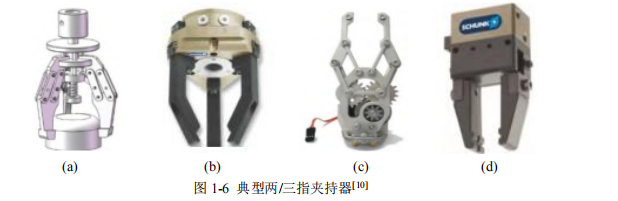
����ĩ��ִ�����ǻ�е��ϵͳʵ���ض�ץȡ���ܵĹؼ���������Ʒ����϶���õ�������������Ķ����˻���ģ�ͣ�����ִ���������ڹ�ҵ�����ߵİ��˹��������͵Ľṹ��¹� FESTO ��˾�������г�����ͼ 1-6��a������SCHUNK ��˾������ƽ��צ�г�����ͼ1-6��b������Gimatic ��˾������ָ��צ��ͼ 1-6��c�������ǵ¿���ָ���ף�ͼ 1-6��d������[10].�����ĩ��ִ���������ض���ץȡ��������Ʒ����ǿ��еģ��˶���һ���ȶ�������Ծ��ޣ�ȱ������ԣ�����������ı����뻷���ĸ��Ŷ���ʵ�־�ץȡ[11].���ڹ�����ץȡ��ץȡ�ķ�ʽ�����кܶ��֣�ʹ��ָ��ʵ������ľ�ȷץȡ����һ�ֿ���ʵ�ֵĽ������[12].��ѧ���о�����ָ��ץȡ�����Ľ���ģ�ͣ�Ϊ������ָ�ṹ����Ƽ�ץȡģʽ��ѡ���ṩ���µ�˼·�������о���Ա��Բ�ͬ����ָ��Ʒ���������ץȡ�����о�[13],��Բ���ץȡ�IJ��ԡ��������ԡ�ץȡ��ʽ�ȷ��������������о�[14],�磺Vincent Babin �ȶԻ�����ץȡ�������˸Ľ���ʹ���ܹ�ץȡ�⻬��Ӳ�����ϵĴ����������[15].
���������ϻ�е�ֺ�ĩ��ִ��������ƺ��о����棬������ѧ�߸��ݹ����ض�ץȡҪ���ֳ���װ�����������Ȳ��ò�����е�ֹ��ͻ��ߴ����˶�ģ�鹹����ĩ��ִ���������ɹ�������ȡ���˽ϴ�Ľ�չ��ʵ��Ӧ�á���Ŀǰ�����ڱ����������ҵ��ĩ��ִ���������ϻ�е�ֻ�δ�漰�����ڽϴ�ļ���ƿ����
����1.2.2 ���������ɻ�е���о���״
������ʵ������˶��Ļ�е�ֹ��Ϳ��������ֱۺ�������ָ���д����ԣ�Ŀǰ���������Ѿ��ܹ�ʵ�����ֵ�ijЩץ�ղ���[16].����¹������ DLR ���Ƶ�"Hasy"��е�ֱۣ��ǵ�һ�����ڱ�ն����������÷���ѧ�ؽڽ�����ָ��ƵĶ�ָ�����֣��о��ص���Ҫ���������ԡ�³���ԺͶ�̬������[17],��ͼ 1-7 ��ʾ��

������ʡ����ѧԺ���˹�����ʵ���Һ���̫��ѧ�Ĺ�������������Ͽ�����һ����Ϊ�о���������ͨ���о����ߵĻ�����ĩ��ִ������Utah/M.I.T ��е�֡��û�е�־��ж� �����ɶȡ��dz��ߵ������ͱ������ܣ��������о����ִ���������ϵͳ[18],��ͼ 1-8 ��ʾ��
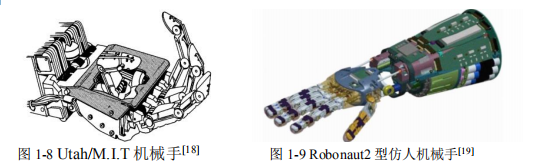
�������� NASA/JSC �� L. B. Bridgwater �����Ⱥ������� Robonaut 1 �� Robonaut 2 ��е�֣����Ƶ� Robonaut 2 ����ָ���ɻ�е�ָ��ӽӽ����ִ�С[19].�û�е�ֽṹ��ͼ 1-9��ʾ��Robonaut 2 ��е��������ʽ�ǵ����������ָ�˲�����Լ 23KN ��������������Robonaut 1 �Ļ����Ͻ����˽ṹ�Ż��������С�� Robonaut 2 ��е�ֵĸ��ӳ̶ȡ�
����Robonaut 2�ͻ�е���ܹ�ʵ�ֲ�ͬ��ץȡģʽ����ɶԶ��ֲ�ͬ��̬���������ʽץȡ����ץȡ��̬��ͼ 1-10 ��ʾ��

����������ѧ���Ƴ��� Janken Robot ��е��[20],����Ӱ���ټ���ʶ�������ֵĶ�����̬�������ڻ�е�ֵ�ָ��λ�ð�װ�ж������λ�ơ��¶ȴ����������Բ�������ָ�ؽڵ�λ�á������Լ�ץȡ������¶ȣ������ܹ�����ʩ���Ĵ�С���ڼ���ʯͷ������Ϸ�п��Կ���ʶ������ֵ����Ʋ�������Ӧ����֤�˼��ߵĻ�ʤ�ʣ���ͼ 1-11 ��ʾ��
�������ڻ�����������˾�з��Ķ�ָ������ DORAHAND ��ͼ 1-12 ��ʾ��ʵ������ ָģ�黯���Ӵ������ԡ�������ԵĹ��ܣ�ÿ����ָ���ж����ĸ�֪��Ԫ������ʵ�ֶ�������������֧���Ȱβ壬����˲���ά�������⡣��ÿ����ָӵ�� 14 �����������ܹ���֪���Ĵ�С[21],���������ڴ������ץȡ������������ָ�Ľṹ����������������ץȡҶ��ʯ���Ȼ�״�������

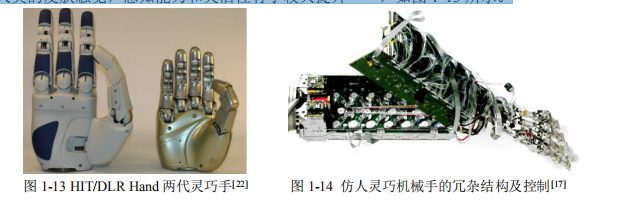
�����㽭��ҵ��ѧ����װ�������ص�ʵ�����Ⱥ��з�������������ָ������ ZJUTHand ��ȫ������������Զ�ָ������[25-27].Ŀǰ�������ֱ���������ָ������о����˹����⡢ץȡ���Ƶȶ�涼�н�չ[28-29].���������ɻ�е�ַdz������������Ϳ��ƽ�������ṹ���ӱ��أ����Կ��ƣ���װ�óɱ��ϸߣ�ά�����ѣ������һ���̶������������ɻ�е���ڹ�ҵ�����е�Ӧ�ã���ͼ 1-14 ��ʾ��
����1.2.3 ��˳�����幹�ͻ������о���״
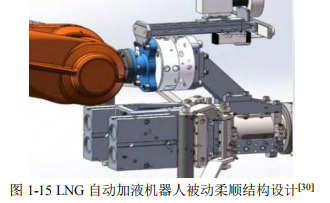
����������˳�ṹ�Ļ�е�֣����ڶ��������ž��Ӧ�ü�ֵ�����͵ĸ����ܻ�е��ĩ����˳ϵͳ���������µ��� KEBA ��˾��������˳���������� ATI ��ҵ�Զ�����˾�Ĺ�ҵ��е����˳��װ�á����ڶ���˳ϵͳ���о�Ҳ�൱�㷺���磺����÷������˲��ñ�����˳�ṹ�ĸ߾����Զ���Һ�����ˣ�ԲͲ����˳�ṹλ�ڻ������ֱ����Զ����߽���װ�����Ӵ�������������Ͻ��пսṹ�������Ե�����˿�����ǰ��߸նȰ�װ��֮������ϴ�ĵ����α�[30],�ṹ��ͼ 1-15 ��ʾ��
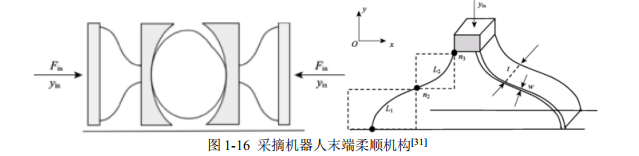
����������ͨ����ĩ��ִ������������˳������ʵ�ֹ��߲�ժ�����������ժ���������������ͻ�����ָ֮��������˳��������˳������һ����λ�Ʒ�Χ��ͨ�����ε��أ����������ڳ����Ե�Ч��[31],����˳��ģ�ͽṹʾ��ͼ��ͼ 1-16 ��ʾ��
�����ڻ������������Ŷ���˳��Ҫ��IJ�����ߣ�����������ķ�չ����һ���µķ���-��������ˡ����������������ϱ�������������������������ҽ�ƿ���������[32-36],��ͼ 1-17 ��ʾ��Xu ��[37]�������������ԭ�����������ֵ���ƣ�ʵ���������ճ�������Ʒ���ȶ�ץȡ�ͼн����ܣ�Ϊ������Ϊ���ܵ���˳��е���ṩ��һ���µ�˼·��
�����������е�ַ��棬�����������е�ַ��棬�����Ķ�����������ѧ SU ��[38]������һ�������ʹ�����Ƕ�ڹ����ϵ� 3D ӡˢģ���ڵ������֣����н�ǿ����Ӧ�Ժ���˳���ԣ�������Ӧ���ڸ��ӷǽṹ�����У����ҶԲ�����Ա���Ӱ�ȫ����ͼ 1-18 ��ʾ��

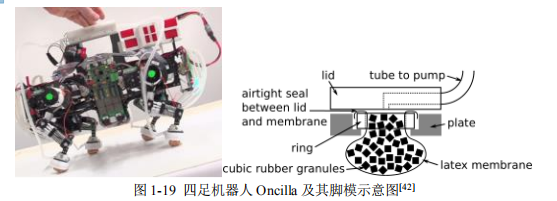
�����ڻ�������Ŀ����ĽӴ��������û���������о�Ҳ�ȽϹ㷺��Ϊ�˼���ײ����Bruneau ������˾������������������ˣ��ڽź͵���֮������˵�������Ԫ�����ı���Թ���֮�䵥һ�Ӵ�������[39].�����������˲������ŷ����������һЩ�����ļ�����ԡ��磺����ƽ������ˣ����Բ����˹�����ʹ������ƶ���[40].Schumann ���о���ͬ�Ľ���Ʋ���[41],���ڸնȺ�����֮�����Ȩ�⣬�γɸ���Ч�Ļ����˵ĽŽṹ�Լ��ٳ������Hauser ����Ƶ� Oncilla ��������˲��û���������п��������������ƽŵ棬�ɰ���������Ĥ�еĿ���������ɣ�����ǿĦ��������[42],��ͼ 1-19 �� ʾ��
������˳�������е��������е�ֵı����������ڣ��ڽṹ�Ͻ���˾ۺ�������ܲ��ϵ�������ϵ���Ȼ��˳���ƣ�����˳�ԡ�����ԡ����Ʒ�ʽ�ȷ�����и��������[41],Ϊ����ץȡ��е���ṩ��һ���µ�˼·��
����1.3 �о��������������Ĺ�������״
�����������о����������ץȡ���漰��ָ�������֮��ij�����⡣�йض������������о����Ƚϵ��͵��о��������£�
����Saurabh Rathod ��[43]���մ�-�������ϲ��ϵĵ������ܽ�������ֵ����������Ԫ��ģ���� Abaqus ��ʽģ���н��еģ�ͨ�� JH2 ����ģ����ģ���մɵIJ������ܣ���ͼ 1-20��ʾ��
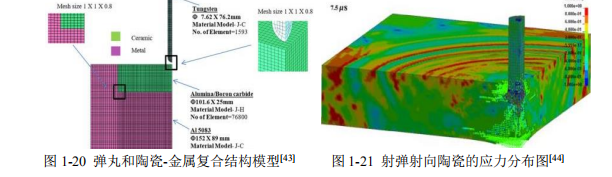
����Bresciani ��[44]�����һ������ά������������Ԫ������ģ�����غϽ��ͷ����ײ���������մ��ߵ��·�������������Ԫת���� SPH[45]���⻬�������嶯��ѧ����Ԫ��ģ���մɵ�ģ�ͣ���ͼ 1-21 ��ʾ��

����Feli �� Asgari ���մ�-�������ϲ��Ͻṹ�ĵ������ܽ�������ֵ����[46],���� JH-2�մ�ģ��ģ���������մɲ��ϡ�Duane S. Cronin ���������ײ���մɲ��ϵ�ʵ��������Լ��ѷ�ͻ���ķ��˹�ؿ����� JH-2 �մ�ģ���� LS-Dyna ��ģ���մɲ���[47].XihongZhang �������� PVB �в㸡�������Է紵ľ����Ƭ����Ĵ�����[48],�Բ�ѹ���������������ٶȲ�ͬ��ľ�����µ������Խ�����ʵ�����ֵģ�⣬���о�����Լ��ѷ����ķ��˹���մɱ���ģ����ģ�ⲣ������ͼ 1-22 ��ʾ��
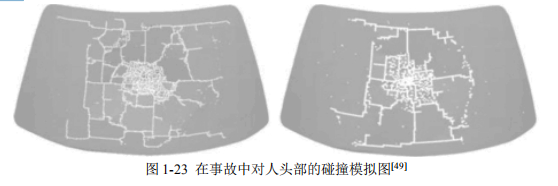
��������Ԫģ�ͣ��� MAT_SILATED_GLASS ����ģ��������������ԡ���ģ��ʹ���˲����� PVB ģ�͵IJ�ͬ��ϣ���ͼ 1-23 ģ�����¹�����ͷײ�������ķ���ͼ�����в�ͬ���������ͺ���������ߴ磨5 ���� 10 ���ף����о��˲�������Ӧ����ͬһ�絲ģ�͵�Ӱ��[49].
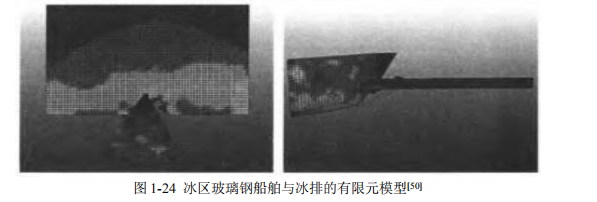
���������̴�ѧ���Ľ����˲�������Ԫ���� ANSYS �����˱��������ִ�������ŵ�ģ��[50],��ͼ 1-24 ��ʾ���� SHELLl63 ��Ԫģ�ⲣ�����̲㣬Ȼ����д�-����ײ�ķ���������Ԫ���㣬�о��ڲ�ͬ�ٶ��²����ִ��������ײ�����
����1.4 �о���״�������ܽ�
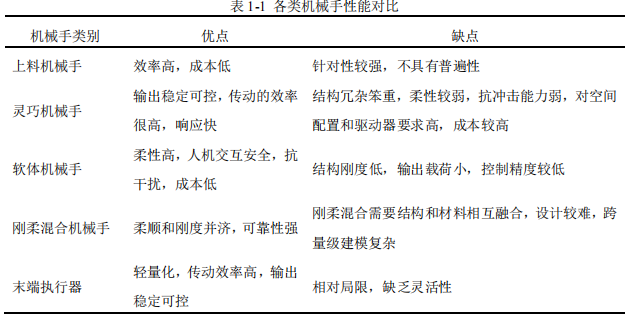
���������������о���Ա���Զ����ϡ�������ָ������ṹ��ץȡģʽ����˳���͡�ĩ��ִ�����ȸ�����Ļ�е�ֽ����˹㷺�о������ڽṹ�����ϵȷ���IJ�ͬ��ÿ�ֻ�е�ֶ����ʺϵ����������ƺͲ���֮������� 1-1 ��ʾ�� �����ڱ������黷״�������ϵĿ�������Զ���ڿ�ѹ�����������ⲿ����ץȡ�İ�ȫԣ�ȸ��ߣ��������ڳ�ʽץȡģʽʱ��������ʹ�����ѣ�����ҵ�ɿ��Ը��͡��о��������黷״���Ļ�е���ڳ�ʽץȡģʽ���ڸ���ļ����Ѷ�����ս��������ijЩ�ض���ҵ��������ҵ�ռ�����ƣ���е���ֱ�������ڳ�ʽץȡģʽ��
�������������о���Ա�ڻ�е�ֵ���ָ����[51]����/λ��Ͽ���[52]����̬ץȡ[53]�ȷ����������һ����̽�֡�������������ṹ������Ƶķ������ɻ�е�־��д����ԣ���ϻ����Ӿ�����������λ���еķ�������ϵͳ���Խ��и��ӵĹ켣�滮����ʵ�ֶ���ָ��������[54-56],�����⼼���Ƚϳ��죬�������Ӧ�����������ҵ��ִ����������ṹ���Ӽ������Ѷȸߣ��������������Ϊĩ��ִ�����ڹ�ҵ�����е�Ӧ�á����ң�Ŀǰ�Ի�е�ֵ���ҵ�о������漰������ĸ����ڳ�ʽץȡ[57-58],�Լ��о��г��������ö����Ľ���ģ�͡�������ն�ƥ�䡣
�����й��ڴ��Բ�����ײ����ķ����о��������մɵ�������Բ��������е����Ե͡��������Զ��ѵ�ȱ�㣬ʹ����Ӧ������Ҫ���俹����ȶ�����ܽ����о���Ŀǰ���е���ֵģ���о������У���Щѧ�߲�������Ԫ����FEM����ģ���մɣ������ܺܺõ�ģ����������������������Լ����������Ƭ�������ĥʴ��SPH �����ʺϴ��Բ����ܳ���������ĩ���˶������������ģ�⣻������Ԫģ��������ܳ�����̣���õ��ǻ��� JH-2 ����ģ�ͽ��н�ģ[59],��Ϊ��ģ�Ͱ����˴��Բ��ϵĴ���Ρ������ƻ�����ѹЧӦ��Ӧ���ʣ��ܹ���Ч��ģ��������IJ������ԡ�
����1.5 ��Ҫ�о�����
����1.5.1 �о�Ŀ��������
����Ϊ�˽�����Բ��������д��ڵ����⣬ʵ���Զ��������ܻ���������Ƴ�һ���ڳ�ʽץȡ�Ļ�е�ֹ��ͣ����幤�����£�
������1�����ۡ����Ƚ��ܿ�����о����������壬Ȼ������ϻ�е�֡����ɻ�е�֡���˳�����幹�ͻ�е�֡�ĩ��ִ������е�ֵȼ���������ܻ�е�ֵĹ����ⷢչ��״�� �������˹������������ײ���о�������
������2����е������ṹ��ơ���Դ��Բ�������IJ������ԣ���������ʯ�ϳ�ԭ��Ҷ��ʯ����������Ҫ��Ϊ���������䰲װλ�ü������ռ����������ڳ�ʽץȡģʽ�������һ�����õı���Բ����������ڳ�ʽץȡ����ѹװ���е�֣��ڶ������幹�ͽ�����ƵĻ����ϣ��Թؼ���λ-��е����ָ������ƽ�������ϸ�ؽ��������������ϸ������ͬ�Ŀ���ϵͳ������е�ֵ����ס�
������3�����������Ļ�е�ֲ����Ż����Ի�е�ֹ��ͽ����˶�ѧ�����������Ż�Ŀ�꽨���ṹ�Ż�����ѧģ�ͣ��������Ŀ�꣬�����Ŵ��㷨���ۣ���д��Ӧ�������ָ��Ľṹ���������Ż��� ��4�����������˳��е��ץȡ��ҵ��������������Ի�е��ָץȡ����������е���ײ������⣬���� SolidWorks��Hyperworks��LS-DYNA �������м��ɽ�ģ���棬�о���е��ץȡ����������Ĺ�����ն�ƥ��������ۣ��������Ի�е�ֵĹ��͡����ϡ��նȡ��˶������ȶ�ץȡ��ҵ���̵�Ӱ����ɡ�
������5�������������˳�ڳ�ʽ��е������������ʵ�顣�����������ڳ�ʽ���ϻ�е��ʵ�������������Ӧ��ҵ�����Ŀ���ϵͳ����֤��������ȷ�ԡ� ��6���ܽ���չ������ȫ�Ľ��и����ܽᣬ�����������еIJ���֮�����Ա������л�е�ֵ�δ���о������������ɺ�չ����
����1.5.2 ���Ŀ��
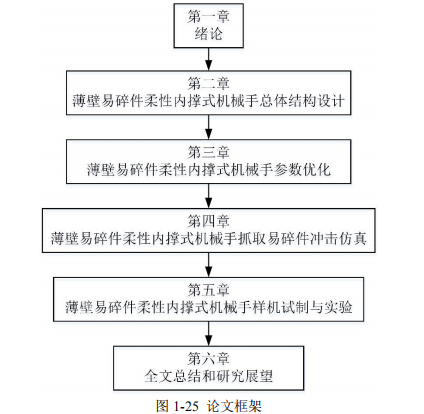
�������ĵ���������ͼ 1-25 ��ʾ��
�����ڶ��� ��е������ṹ���
����2.1 ����
����2.2 ��е�ֹ���Ҫ��������˶�ʵ��
����2.3 ��е����ָ�������
����2.4 ��ָ����ϵͳ�����Ƚ�
����2.4.1 ������������
����2.4.2 ��ѹ��������
����2.4.3 �ŷ��������
����2.5 ������
���������»�е�ֲ����Ż�
����3.1 ����
����3.2 �Ż���������
����3.3 �ڳ�ʽ��е����ָ�˶�ģ����
����3.4 �����Ŵ��㷨����е�ֻ��������Ż�ģ��
����3.4.1 ��е�ֻ����Ż�ģ�͵Ľ���
����3.4.2 �Ŵ��㷨�Ļ���˼�뼰�䲽��
����3.4.3 �Ŵ��㷨�Ĺؼ�����
����3.5 �Ż����ʵ������������
����3.5.1 ����������ֵ
����3.5.2 �Ż���������
����3.6 ������
���������� ��е��ץȡ���������������
����4.1 ����
����4.2 ������������ۻ���
����4.2.1 �����������
����4.2.2 ����Ԫ��������
����4.3 ���ɽ�ģ���漼���ؼ�
����4.4 ��е��ץȡ���������ҵ������̵���ֵģ�����ۻ���
����4.4.1 ���Բ�����ѧ�����о�
����4.4.2 ��е���ȶ�ת�����ϼӳ����ļ���
����4.4.3 ����ģ�ͼ�����ѡ��
����4.4.4 ɳ©���ƺͽӴ�ģ�͵Ķ���
����4.4.5 ��е��ָ��ײ������߽�������ʩ���غ�
����4.4.6 ��е��ָ��ײ������������Ʒ���
����4.5 �ڳ�ʽ��е��ָץȡ�������ҵ��ײ�������
����4.5.1 ��������ʵ���е�����������
����4.5.2 �����ط������
����4.5.2 �����ط���������
����4.5.3 �����������������ҵ���̵��Ż�����
����4.6 ������
���������� ��������������ڳ�ʽ��е������������ʵ��
����5.1 ����
����5.2 ����������ڳ�ʽ��е�ֿ���ϵͳ���巽��
����5.3 ����ϵͳ��Ӳ���������
����5.3.1 �����ѡ��
����5.3.2 �˶����ƿ�ѡ��
����5.4 ���������������
����5.4.1 ���ϻ�е�ֿ���ϵͳ���ܽ���
����5.4.2 ����������ڳ�ʽ���ϻ�е�ֿ���ϵͳ����ģ�����
����5.5 �����ڳ�ʽ���ϻ�е������ʵ��
����5.6 ������
������ �ܽ���չ��
����6.1 �о������ܽ�
����������ʵ����ԭ�����ϻ�е�ֵĻ����ϣ��ڹ�����Ȼ��ѧ����52075500��������������ڳ�ʽ������ҵ��˳��е�ָն�-����ƥ��������˶������о����������£�Χ�Ʊ���������������ϻ�е����һ���չ������о���ͨ��������ҵ����Ҷ��ʯ����Ҷ��ʯ�����ѧ�������ƶ�����Ӧ��������Ʒ��������Ըû�е��ϵͳ����ָ���ͺͽṹ�����������Ż���ƣ��Ի�е�ֺ������֮�����ײ���̽����˷���������������Ʒ��������˻�е����������˻�е��ץȡҶ��ʯ����ʵ��ƽ̨������չ�����ʵ�飬��֤�˱���������ڳ�ʽ��˳��е�ֽṹ�����Ŀ����Ժ�Ч�ԡ�
����������Ҫ���о����ݺͽ������£�
������1���Թ�����������ϻ�е�ֽ����˵��У���������Ӧ����������ɻ�е�֡���˳��е�֡������е�ֵȣ�������ѧ�߽����˽�Ϊ������о�������Ա���������������ϻ�е�ֵ��о�ȴ����ͺ�Ŀǰ��û�п���ʵ�ֹ�ҵ��Ӧ�õĻ�е��װ�á����������ʯ��ԭ��-Ҷ��ʯ��Ϊ���������������̻�е���̶ȵͣ��˹�����������������⣬����ʵ�ָ�����ҵ��Ӧ��������ˣ�����ͨ������Ҷ��ʯ������״���������ԡ���ҵ�ռ�ȶ������أ�������ڳ�ʽ�ļгַ�ʽ������ϻ�е����ƵĻ������ۺͷ���ѧԭ����ԭ���Ե������һ�����ڱ���������ڳ�ʽ������ҵ����˳��е�ֹ��ͣ����� �������������˸û�е����άģ�͵Ĺ�����
������2�����ڳ�ʽ��˳��е�����幹����ƵĻ����ϣ������˻�е��ϵͳ�˶�ѧģ�ͣ�������������˶�ѧ�������Ի�е�ָ��ṹ��������ָĩ���ٶȡ����ٶ��˶���ϵ��������⣬��֤�˳�ʼ��Ʒ����ͽṹ�����Ŀ����ԡ��ڴ˻����Ͻ�������ѧģ�ͣ����� ���Ŵ��㷨�Ż���е�ֹؼ��ṹ����������˻�е��ץȡ������Ŀɿ��Ժ�Ч�ԡ�
������3���ڷ������������ģ�����ܶȵȹؼ���ѧ���ԵĻ����ϣ�ͨ�� SolidWorks��heperworks��LS-DYNA �����������˱���������ڳ�ʽ���ϻ�е�ֵ�����Ԫģ�ͣ�����˳��е�ֺ������֮�����ײ���̽����˷������������������������������ܵ������Ӧ��ֵС�ڲ��ϵ���������Ӧ��ֵ��֤����е�ֵĽṹ�Ͳ���������㱡�����������ҵҪ����Ʒ����������ڴ˻������о��˲�ͬ���ϵ�����Ӳ��ָ�����ṹ��ץȡλ�õ���������ҵ�����ж��������α��Ӱ����ɣ�����ȷ����һ����ѵ���ָ�ǽṹ�Ͳ�����ò������
������4������ݱ��������Ҷ��ʯ������ҵҪ����ص㣬�Կ���ϵͳ�����巽����������ƣ����ڿ���ϵͳ�Ĺؼ�Ӳ��������ѡ�ͺ��о������ڿ���ϵͳ�����з�ʽ����ƺͱ�д�˻�е��ϵͳˮƽ����ֱ�˶��Լ���ָ�ź��˶��Ŀ��Ƴ����ʵ��������ʵ��ƽ̨������չ����ص�Ҷ��ʯ��ץȡʵ�飬������֤�˸ñ���������ڳ�ʽ��˳��е�ֿ���ϵͳ�ͽṹ�����Ŀ����ԡ�
����6.2 �о�չ��
����������Ա��������������ҵ�����ٵĿ�ѧ�뼼�����⣬��Ƶı���������ڳ�ʽ���ϻ�е��Ӳ��������ϵͳ��ʵ��Ӧ���л�������ʹ��Ҫ��������Ż��ṹ����ָ����Ʒ����õ�����֤���ﵽ��Ԥ�ڵ�Ч�������Ǹû�е����ijЩ���滹������һЩȱ��Ͳ��㣬��Ҫ��һ���ظĽ������ƣ���Ҫ������
������1����ץȡ���������ҵ�����У�����ڻ�е�����˶��������д�λ������������е��ϵͳû��������һ�����Զ�λ�õ��ڿռ䣬��������Ӧ����λ��ƫ���е��Ӳʩ������������������
������2������ѡ������Ϊ������ָ�ĵ��Բ��ϣ�Ҳ����ѡ�ò�ͬ�IJ��ϣ��� PVB ����ϩ������ȩ���轺�ȵ��Բ��ϣ���ץȡ�����У���ͬ�����������֮�������Ħ���������������Ҳ��������ͬ����Ҫ��һ����ʵ��ͷ����о���
������3�����ڱ����о��Ķ���Ҷ��ʯ����Ҷ��ʯ����ڱڶ���ֱ����ͬ��Բ���ڱڣ�������һ����е�־Ϳ�������������Ϲ��̵���ҵҪ������û�е��ץȡ�ھ���С��һ�������������������ʰ뾶��һ�µ���������¸û�е��ָ������ҵ��������ȫ���ϣ���������������ܵ���Ӧ��ֵ�����ڸ�����ҵ�����л�������������ѵĿ����ԡ���ˣ�����ض��ߴ����ҵ������Ҫ�����Ӧ�ߴ���Ļ�е�ֽṹ������ͨ���Ľ���е��צ����Ʒ��������е�ֵ�ͨ���ԡ�
���������
����[1] Piazza C, Grioli G, Catalano M G, et al. A century of robotic hands [J]. Annual Review ofControl, Robotics, and Autonomous Systems, 2019, 2: 1-32.
����[2] Psomopoulou E, Karashima D, Doulgeri Z, et al. Stable pinching by controlling fingerrelative orientation of robotic fingers with rolling soft tips[J]. Robotica, 2018, 36��2����204-224.
����[3] �������� �����ԣ� �Ž����� ���� PLC ���Ƶ����ܻ�е�ֵ����[J]. Һѹ�������� 2012,000��011����1-4.
����[4] �ַ塣 ��Ӳ���ϵ��о���չ[J]. ����ҵ���� 2016, 6��3���� 28-52.
����[5] Mizukawa, M. Robot technology ��RT�� trend and standardization[C]. Advanced Roboticsand its Social Impacts, 2005. IEEE Workshop on IEEE, 2005, Nagoya, Japan, June 12-15,2005: 249-253.
����[6] ���Խ��� �ӽ��ѹ�Զ������ϻ�е�ֵ��о��뿪��[D].����������������ҵ��ѧ��2015.
����[7] ����ΰ�������֣����ɣ��ȡ� ������С�ͳ崲�ľ������Զ����ϻ�е������[J]. ��ѹ������ 2011, 36��6���� 66-69.
����[8] ���������ƽܣ������ȡ��Զ�����ϵͳ�������細������װ�е�Ӧ��[J].����ʵ�ü�����2020,45��21����188-191.
����[9] ������ �����Ӿ������IJ�ѹ�����ϻ�е�ֹؼ������о�[D].�ػʵ����ӱ��Ƽ�ʦ��ѧԺ��2020.
����[10] ����������־�ɣ���ΰΰ���ȡ������˶�ָ�����ֵ��о���״����������ս[J/OL].��е����ѧ����2021,57:1-14[2021-03-15].
����http://kns.cnki.net/kcms/detail/11.2187.TH.20210304.1553.094.html.
����[11] J. Shintake, S. Rosset, B. Schubert, et al. Versatile soft grippers with intrinsicelectroadhesion based on multifunctional polymer actuators[J]. Advanced Materials,2016, 28��2����231-238.
����[12] Ciocarlie M, Hicks F M, Holmberg R, et al. The Velo gripper: A versatile single-actuatordesign for enveloping, parallel and fingertip grasps[J]. The International Journal ofRobotics Research, 2014, 33��5����753-767.
����[13] Máximo A. Roa, Raúl Suárez. Finding locally optimum force-closure grasps[J]. Roboticsand Computer-Integrated Manufacturing, 2009, 25��3����536-544.
����[14] Sintov A, Shapiro A. Dynamic regrasping by in-hand orienting of grasped objects usingnon-dexterous robotic grippers[J]. Robotics and Computer-Integrated Manufacturing,2018, 50:114-131.
����[15] Vincent Babin, David St-Onge, Clément Gosselin. Stable and repeatable grasping of flatobjects on hard surfaces using passive and epicyclic mechanisms[J]. Robotics andComputer Integrated Manufacturing, 2019, 55:1-10.
����[16] Faudzi A A M, Ooga J, Goto T, et al. Index finger of a human-like robotic hand using thinsoft muscles[J]. IEEE Robotics & Automation Letters, 2018, 3��1����92-99.
����[17] Grebenstein M, Albu-Sch?ffer A, Bahls T, et al. The DLR hand arm system[C].Roboticsand Automation ��ICRA���� 2011 IEEE International Conference on IEEE, 2011, Shanghai,China, May 9-13, 2011: 3175-3182.
����[18] Jacobsen S C, Iversen E K, Knutti D F, et al. Design of the Utah/M.I.T. DextrousHand[C]// Robotics and Automation. Proceedings. 1986 IEEE International Conferenceon. IEEE, 1986,3:1520-1532.
����[19] Bridgwater L B, Ihrke C A, Diftler M A, et al. The Robonaut 2 hand designed to do workwith tools[J]. Proceedings IEEE International Conference on Robotics and Automation,2012:3425-3430.
����[20] Ito K, Sueishi T, Yamakawa Y, et al. Tracking and recognition of a human hand indynamic motion for Janken ��rock-paper-scissors�� robot[C]// 2016 IEEE InternationalConference on Automation Science and Engineering ��CASE���� IEEE, 2016:891-896.
����[21] ��Ԫ�ɣ��������������ӣ��ȡ� �����������ش�������̬�����Ļ����������ֵѿ����迹����[J]. �����ˣ� 2012, 34��1����22-31.
����[22] Liu H , Wu K , Meusel P , et al. Multisensory five-finger dexterous hand: The DLR/HITHand II[C]// Proc IEEE/RSJ Int Conference on Intelligent Robots & Systems. 2008.
����[23] Hirzinger, G. Advances in Robotics: The DLR Experience[J]. International Journal ofRobotics Research, 1999, 18��11����1064-1087.
����[24] л���ס���ָ������ DORAHAND[J].��ƣ�2021,34��02����99-101.
����[25] ��־�㣬Ǯ���������컪���ȡ����������˶�ָ������ --ZJUT Hand[J].�����ˣ�2012,34��02����223-230.
����[26] WANG Zhiheng,ZHANG Libin,BAO Guanjun,et al. Pneumatic robot multi-fingered dexterous hand-ZJUT Hand[J]. Journal of Central South University,2011,18��4����1105-1114.
����[27] Zhu L, Wang W, Tao Z, et al. Full-Drive Decoupled Bionic Finger: Structure andExperimental Trials[C]// 2019 IEEE International Conference on Robotics andBiomimetics ��ROBIO���� IEEE, 2019:497-502.
����[28] Ouyang G, Zhu X, Ju Z, et al. Dynamical Characteristics of Surface EMG Signals ofHand Grasps via Recurrence Plot[J]. IEEE Journal of Biomedical & Health Informatics,2014, 18��1����257-265.
����[29] Fang Yinfeng, Zhou Dali, Li Kairu, et al. Interface Prostheses With Classifier-FeedbackBased User Training[J].IEEE TRANSACTIONS ON BIOMEDICALENGINEERING,2017, 64��11���� 2575-2583.
����[30] ����÷�����꣬��ΰ�����壬�½ܡ��߾��� LNG �Զ���Һ�����˱�����˳�ṹ���[J].�����˲�ҵ��2019��05����32-37.
����[31] �����֣�ҷᡣ ƻ����ժ������ĩ��ִ����������˳��������[J].ũҵ����ѧ����2019,35��10����19-25.
����[32] Kang Brian Byunghyun, Choi Hyungmin, Lee Haemin, et al. Exo-Glove Poly II: APolymer-Based Soft Wearable Robot for the Hand with a Tendon-Driven ActuationSystem.[J]. Soft robotics,2019,6��2����1-13. [33] Nycz CJ, Bu tzer T, Lambercy O, et al. Design and char-acterization of a lightweight andfully portable remote ac-tuation system for use with a hand exoskeleton[J]. IEEE RobotAutom Lett 2016,1��2����976-983.
����[34] Yun Y, Agarwal P, Fox J, et al. Accurate torque control of finger joints with UT handexoskeleton through Bowden cable SEA[C]// 2016 IEEE/RSJ International Conferenceon Intelligent Robots and Systems ��IROS���� IEEE, 2016:390-397.
����[35] Jones CL, Morrison FWR, Sarkar N, et al. Design and development of the cable actuatedfinger exoskeleton for hand rehabilitation following stroke[J]. IEEE Trans Mecha-tron2014,19��1����131-140.
����[36] Sarakoglou I, Brygo A, Mazzanti D, et al. HEXOTRAC: A highly under-actuated handexoskeleton for finger tracking and force feedback[C]// IEEE/RSJ InternationalConference on Intelligent Robots & Systems. IEEE, 2016:1033-1040.
����[37] Xu K, Liu Z, Zhao B, et al. Composed continuum mechanism for compliant mechanicalpostural synergy: An anthropomorphic hand design example[J]. Mechanism andMachine Theory, 2019, 132:108-122.
����[38] She Y, Li C , Cleary J, et al. Design and Fabrication of a Soft Robotic Hand WithEmbedded Actuators and Sensors[J]. Journal of Mechanisms and Robotics, 2015,7��2����21007-1-21007-9.
����[39] O.Bruneau, F.B.Ouezdou, J.G. Fontaine. Dynamic walk of a bipedal robot havingflexible feet[C]. In Proc. IEEE Int. Conf. Intell. Robots Syst., Maui, HI, USA ,2001:512-517.
����[40] H. Ishihara, T. Nagayama, H. Tomori, T. Nakamura. Landing method for a one-leggedrobot with artificial muscles and an MR brake[C].In Proc. 41st Annu. Conf. IEEE Ind.Elec. Soc., IECON 2015, Yokohama, Japan, 2015:1879-1884.
����[41] �Ž�������躣���������ϡ������е���о�����[J].��е����ѧ����2017,53��13����19-28.
����[42] S. Hauser, P. Eckert, A. Tuleu, A. Ijspeert. Friction and damping of a compliant footbased on granular jamming for legged robots[C].In Proc. 6th IEEE RAS/EMBS Int. Conf.Biomed. Robot. Biomechatronics, UTown, Singapore , 2016:1160-1165.
����[43] Rathod S, Tiwari G, Chougale D. Ballistic performance of ceramic-metal compositestructures[J]. Materials Today: Proceedings, 2020,41��5����1125-1129.
����[44] Bresciani L M, Manes A, Romano T A, et al. Numerical modelling to reproducefragmentation of a tungsten heavy alloy projectile impacting a ceramic tile: Adaptivesolid mesh to the SPH technique and the cohesive law[J]. International Journal of ImpactEngineering, 2016, 87��2����3-13.
����[45] ��ͳɣ�Ф�㻪���մɺͷ�����ĸ�մ�/���帴�Ͻṹ�ij�����˶Ա�[J].��ѹ����ѧ����2020,34��02����75-81.
����[46] Huang C Y, Chen Y L. Design and impact resistant analysis of functionally graded Al 2 O3 -ZrO 2 ceramic composite[J]. Materials and Design, 2016, 91��2����294-305.
����[47] Cronin D S, Bui K, Kaufmann C, et al. Implementation and validation of theJohnson-Holmquist ceramic material model in LS-Dyna[C]//Proc. 4th Eur. LS-DYNAUsers Conf. 2003, 1: 47-60.
����[48] Xihong, Zhang, Hong. Laboratory test and numerical simulation of laminated glasswindow vulnerability to debris impact[J]. International Journal of Impact Engineering,2013,55��1����49-62.
����[49] Yong P, Yang J, Deck C, et al. Finite element modeling of crash test behavior forwindshield laminated glass[J]. International Journal of Impact Engineering, 2013, 57��7����27-35.
����[50] ���Ľ��� �߱��� ���������ȡ� ���ڷ���������Ԫ���ı���������ʵ�鴬��ײ�����о�[J]. �������� 2018, 37��14����262-268,276.
����[51] Devi M A, Udupa G, Sreedharan P. A novel underactuated multi-fingered soft robotichand for prosthetic application[J]. Robotics and Autonomous Systems, 2018,100��3����267-277.
����[52] Barbalata C, Dunnigan M W, Petillot Y. Position/force operational space control forunderwater manipulation[J]. Robotics and Autonomous Systems, 2018, 100��3����150-159.
����[53] Sintov A, Shapiro A. Dynamic regrasping by in-hand orienting of grasped objects usingnon-dexterous robotic grippers[J], Robotics and Computer-Integrated Manufacturing,2018,50��8���� 114-131.
����[54] Mizukawa, M. Robot technology ��RT�� trend and standardization[C]. Advanced Roboticsand its Social Impacts, 2005. IEEE Workshop on IEEE, 2005, Nagoya, Japan ,2005:249-253.
����[55] ����ΰ�� �����֣� ���ɣ��ȡ� ������С�ͳ崲�ľ������Զ����ϻ�е������[J].��ѹ������ 2011, 36��6���� 66-69.
����[56] �����ף� �����֣� �Ž����� �������ϻ�е�ּ��乤���ռ����[J].�й���е���̣�2016, 27��13���� 1743-1747.
����[59] ����ƽ���Ϸ������꾰�𣬵ȡ�����������˶�ѧ�붯��ѧ��ģ����[J].�Ͼ��ʵ��ѧѧ������Ȼ��ѧ�棩�� 2018, 38��1���� 20-26.
����[60] Psomopoulou E, Karashima D, Doulgeri Z, et al. Stable pinching by controlling fingerrelative orientation of robotic fingers with rolling soft tips[J]. Robotica, 2018, 36��2����204-224.
����[59] ������ �ŵ����� �����㣬�ȡ� Ti/Al_3Ti ���㸴�ϲ��ϳ�����˽�ģ��ʧЧ����[J]. �������Ͽ�ѧ�빤�̣� 2019,294��03����122-127.
����[60] �����ģ����Żԣ������֣��Ϸ��Ǯ���������ӷ塣Բ���ڱڹ������ڳ�ʽץȡ��װ���е�����[J].��е������2019,43��09����166-170.
����[61] Wang L W, Wang T H, Mu Y L, et al. The Bionic Configuration of Loading FlexibleManipulator Based the Inner Bracing Grab Method[C]. 2018 International Conference on Robots & Intelligent System ��ICRIS���� IEEE Computer Society, 2018:513-516.
����[62] �����ģ���ޱޱ�������֣��ȡ�Բ���ڱڼ���ѹװ���е�ֽṹʵ�ּ����ɲ�����ѡ[J].��е������2021,45��01����146-151.
����[63] Aimee Cloutier, James Yang. Grasping Force Optimization Approaches forAnthropomorphic Hands[J]. Journal of Mechanisms and Robotics, 2018, 10��1���� 011004.
����[64] ��Ѷ������ٻԣ��²�������Ӣ�������Ʒ������ƵĸĽ�����ʽ�Ŵ��㷨[J].�й���е���̣�2018,29��20����2474-2478.
����[65] ʯ�ɣ���ʫ�������ڹ���Լ����������Ŵ��㷨����Ʒ�ۺϵ�������[J].�й���е���̣�2017,28��20����2483-2492.
����[66] ���ң�Ԭ����ڼ��ǣ��Ÿ�ΰ������ƽ���Ŵ��㷨���Ż������е�Ӧ������[J].ɽ����ҵ������2019��12����242-243+180.
����[67] ��ӱ�� ���ߴ���������ĸ��ǿ����㷨�о�[D].̫ԭ��̫ԭ�Ƽ���ѧ��2020.
����[68] ��֡� ��ȫ�DZ�ϵͳ��ά�����Ż���Ӧ��[D].����������������ѧ��2017.
����[69] ���˱��� �������ǿ��ѧϰ�����ܾ���ģ���о�[D].������������ͨ��ѧ��2020.
����[70] ����ΰ�� �����������ij���������ϵ�����о�[D].������������ҵ��ѧ��2017.
����[71] ���ǽܡ� �Ľ��Ŵ�ģ���˻��㷨�����ڽṹ����ʶ���е�Ӧ��[D].�������ӱ����̴�ѧ��2013.
����[72] Yao R, Su F , Mao R . Influence of interfacial bonding conditions on the anti-penetrationperformance of ceramic/metal composite targets [J]. International Journal of Mechanicsand Materials in Design, 2019, 15��4����833-844.
����[73] ���ۣ��������������¡����ڴ�ͳ�IJ���������Ż��Ľ����[J].��е�о���Ӧ�ã�2020,33��02����132-134.
����[74] ������ ���ڷ�������ķ�����������ƣ�ͻ����о�[D].̫ԭ���б���ѧ��2012.
����[75] �����ܡ� ���Բ�����ѧ�������������[M]. �й����������磬 1996:23-26. [76] ���� �ճж��� ���찲���ȡ� Ҷ��ʯ��������ѹ������ѧ���ܵ�ʵ���о�[J]. ��Ӳ���Ϲ��̣� 2007, 019��002����16-19.
����[77] �������� ANSYS 14.5/LS-DYNA ����������Ԫ����ʵ��ָ���̳�[M]. ��е��ҵ�����磬 2011:89-90. [78] Anderson C E, Royal-Timmons S A. Ballistic performance of confined 99.5%-Al2O3ceramic tiles[J]. International Journal of Impact Engineering, 1997, 19��8����703-713.
����[79] Holmquist T J, Johnson G R, Grady D E, et al. High strain rate properties and constitutive Modelling of glass[J]. Glass, 1995, 1:163-165.
����[80] Deborah L. Bakowski,Susan T. Davis, William F Moroney. Reaction Time and GlanceBehavior of Visually Distracted Drivers to an Imminent Forward Collision as a Functionof Training,Auditory Warning,and Gender[J]. Procedia Manufacturing, 2015, 3��1����3238. 3245.
����[81] Zhang X, Hao H. Laboratory test and numerical simulation of laminated glass windowresponse to impact and blast loads[C]// The 9th international conference on shock andimpact loads on structures. 2011:705-714.
����[82] Abe K, Nishigaki H, Ishivama S I, et al. Collapse of Thin-Walled Curved Beam withClosed-Hat Section - Part 2: Simulation by Plane Plastic Hinge Model[C]// SaeTransactions. 1990:13-21.
����[83] ��ͳɡ� �մ�/���帴�Ͻṹ��������ܵ���ֵģ���о�[D].�ϲ���������ͨ��ѧ��2020.
�� л
��������Ҫ��ҵ�ˣ������п���˵���������Դӿ���ʧ���Ժ�����������ش�����Ȼ����ѧУ��ʱ���յ��˺ܶ�֪ͨ�飬���ǻ��Ǿ����Լ�ͦ���ģ��Ժ�����ĵ�·Ҳ����Ϊֹ�ˡ�����ѧУʱ��ͨ�������˽⣬�������Ľ������ķ���ܸ���Ȥ�����Ҳ��Ը��Ϊ�����Ľ��ڵ�ѧ�������Ƕ���δ�����Լ��Ǿ�ɥ�ģ���ʲô�¶�û��̫��Ķ�������˹���Ч��Ҳ�ܵͣ����Ǻܳ�һ��ʱ���Ժ����Ӵ��������Ľ��ں����Ż�ʦ�����������е�̬�ȣ����ҷ������ĵľ��壬��Ⱦ���ҡ����ҵ����У������Ľ��ں����أ�Ҳ�ܾ�ҵ�����˴����Ϊ�����ݵ���ͣ���Ȼ�����ŶԿ��е��Ȱ���ÿʱÿ�����ſ������⣬���ǻ��кܶ�õ��뷨�����������У��о���ʦ����е�ʱ�����Ҹ��ģ��Ǹ�ʱ�����ʶ�����Լ�������һʱ�ĵ�ʧ�ж�ô�����������˶��������ġ�˶�����Լ���Ӱ������Զ�ģ��ر��л�Լ��ܹ�������ôһλ�ɾ��ֿɰ�����ʦ������ѧ���˺ܶ�����Ʒ��ϣ���Լ����ڿ��еĵ�·���ߵø�Զ����һ���Ϊ�����Ľ����������ˣ��һ�Ϊ�˸���Ŭ���ġ����Ż�ʦ�֣����������Һܴ�İ���������ʲô���⣬�����ǻ����ĵؽ��̤ʵ����Ŀ���̬�ȣ����Ҹ��������һ�㡣ʦ���ʦ�㣬�����ڼ����ʱ��������ǿ϶�����������ǰ�С��ż̺�����ʿ�ȵȸ�λʦ���ǣ���һ�����������һЩ���й����г��ֵ����⣬��ϲ�����ַ�Χ�����㼺����һ��ѧϰ����æ��ʱ����Ҳ��һ����Ц����Ծ���ա��Լ�����һ������Բͬ־�����ҵ���ʦ���ѣ��̻��Һܶ����������ѧ���˶��������ı�ø���ǿ�����ҳɳ�����֮��������ѧ���˺ܶ࣬Ҳ��Ϊ���ǵĴ��ڸе����ġ����㣬�������˵ġ�ϣ����Ҷ���Խ��Խ�ã�ϣ����ʦ���չ˺��Լ������壬ʦ������������Ҫ�������켣��
��������Ҫ�鿴��ƪ��ҵ���ȫ�ģ�������ϵ�ͷ���ȡ��