24小时论文定制热线
24小时论文定制热线
摘 要
近年来,机器人在各行业得到了大量的应用,机械夹具作为机器人具体抓取动作的执行部件受到人们的广泛关注和研究。目前,各种类型的机械夹具大多存在结构复杂、通用性差等问题,这在一定程度上限制了机器人技术在某些方面的应用。因此,研究开发通用、高效的机械夹具具有重要的工程意义和实用价值。
磁流变液(Magnetorheological Fluid,简称 MRF)平时为类液态,在外磁场的作用下,表现为固体的性质,当撤除外加磁场时,又恢复原来的流动性质,即在液态和固态之间进行快速可逆的转换,并且这种转换响应快(ms 量级)、可逆性好。本文基于 MRF 的上述性质设计了一种结构简单、通用性好、能实现柔性抓取的通用性机械夹具,并对其抓 取性能进行了测试分析,主要工作如下:
(1)运用基液置换法配制出 MRF,搭建实验平台,开展 MRF 在磁场作用下的挤压和拉伸力学性能测试;发现在挤压与拉伸过程中应力随应变的变化分为三个阶段,并分析各阶段微观结构演化过程;进一步研究 MRF 沉降稳定性和预结构化过程,为磁流变夹具的设计提供参考。
(2)根据 MRF 挤压与拉伸工作模式及力学性能特点,提出 MRF 指套式工作模式,设计出初始磁流变夹具;进行不同形状物体的抓取试验,发现其具有良好的通用性,基于抓取不稳定的缺点,提出磁场内聚式的优化设计方案。
(3)基于优化方案对整体磁路进行重新规划,运用 ANSYS 有限元软件模拟 MRF 工作区域的磁场分布并确定磁流变指套的合适尺寸;优化后的磁流变夹具具有优异的通用性;利用 INSTRON 材料试验机测试磁流变夹具的抓取力,分析得到其抓取性能与所加电流、抓取物的形状尺寸等因素有关。
整体来看,本文能够为之后磁流变夹具及相关器件的设计提供技术储备和参考,也可以为相关领域的研究应用提供一定的指导。
关键词:磁流变液,抓取装置,磁路,仿真分析
ABSTRACT
In recent years, robots have been widely used in various industries. Mechanical grippers have been widely studied and studied as the executing parts of the robot's specific grasping actions. At present, all types of mechanical grippers have many problems such as complicated structure and poor versatility, which limits the application of robot technology in some aspects. Therefore, research and development of universal and efficient mechanical grippers have important engineering significance and practical values.
Magnetorheological Fluid (MRF) is usually a liquid. Under the action of an external magnetic field, it is in the nature of a solid. When the magnetic field is removed, the original flow property is restored, that is, the liquid and the solid state are fast. Reversible conversion, and this conversion response is fast (ms level), good reversibility. Based on the above properties of MRF, this paper designs a general-purpose mechanical grippers with simple
structure, good universality, fast response, and flexible gripping. The gripper performance is tested and analyzed. The main work is as follows:
(1) The MRF was prepared using a liquid-substitution method, an experimental platform was set up, and the mechanical properties of the MRF under the action of a magnetic field were tested. It was found that the stress changes with strain during the extrusion and drawing process and is pided into three stages. Analyze the evolution of microstructure in each stage; further study the settlement stability and pre-structured process of MRF, and provide reference for the design of magnetorheological gripper.
(2) According to the working and mechanical properties of MRF extrusion and drawing, the MRF finger-tip working mode was put forward, and the initial magnetorheological fixture was designed. The gripping tests of different shaped objects were performed, and it was found that it had good versatility and was based on grabbing. The disadvantages of instability, proposed magnetic field cohesion optimization design.
(3) The overall magnetic circuit was re-planned based on an optimized scheme. ANSYS finite element software was used to optimize the magnetic field distribution in the MRF work area and determine the appropriate size of the magneto-rheological finger sets. The optimized magnetorheological fixture had excellent versatility; the use of INSTRON materials The testing machine tests the gripping force of the magneto-rheological fixture and analyzes that the gripping performance is related to the applied current, the shape and size of the gripper, and other factors.
On the whole, this paper can provides technical reserves and references for the design of magneto-rheological grippers and related devices, and can also provide guidance for research and application in related fields.
Key words: magnetorheological fluid, gripper device, magnetic circuit, simulated analysis
目 录
第 1 章 绪 论
1.1 课题研究背景与意义
近年来,随着科学技术水平的提升,机器人技术得到了快速发展,其应用已经不仅仅局限于传统的工业制造领域,在医疗卫生服务、精密仪器、教育娱乐、食品加工、勘探勘测以及生物工程等领域机器人都得到了大量的应用[1].机器人更是有望成为继汽车、飞机、计算机之后出现的又一战略新兴产业,具有巨大的发展潜力[2];其研发、制造、应用是衡量一个国家科技创新和高端制造业水平的重要标志[3].
目前,世界各国都已将研究机器人技术、发展机器人产业作为本国科技发展的战略重点并制定相关发展规划。美国自 2011 年以来相继提出"先进制造业伙伴计划"、"国家机器人计划"、"美国机器人发展路线图"专注于机器人核心技术及其产业化发展,2012年,为支持本国机器人产业发展,韩国发布了"机器人未来展望 2022",2013 年德国提出了基于机器人技术的智能制造系统"工业 4.0"计划,2014 年日本提出"新经济增长战略"并将机器人产业作为其重点扶持产业之一[4, 5],为抢占科技制高点我国紧跟时代步伐,无论是国家高技术研究发展计划(863 计划)、国家自然科学基金、国家科技重大专项等科技发展规划[6],还是"中国制造 2025"的提出都对机器人技术给予了高度重视和巨大投入,并且机器人已被列为中国"十三五"重大工程项目之一[7, 8].
随着机器人技术的快速发展以及其应用领域的不断扩展,对于机器人性能的要求也不断提高,特别是服务机器人对于不同的工作环境、不同形状、大小的目标物体要求机器人同样能够稳定、高效的工作。市场的需求使得机器人朝着智能化、通用性、高度适应性方向发展[9],通常来说,机械夹具作为各种类型机器人与外部作业环境相互作用最后环节和具体抓取动作的执行部件,其整体性能的优劣对机器人完成指定任务的能力和作业水平有着非常重要的影响。而衡量一个机械夹具性能的优劣主要是从其使用过程中抓取和操作的灵活性、精确性、以及对于目标物体的适应性和承载能力等方面的综合性 能考量[10].随着万物互联和"机器换人"大时代的到来,各种类型的机器人在各行各业都得到大范围的应用,这种市场的需求也在客观上推动着对于机械夹具的研究。目前,机械夹具结构复杂、维护困难、响应缓慢、通用性差、成本高等问题已成为阻碍机器人技术普及与应用的主要因素,而如何解决机械夹具面临的这些问题,也成为整个机器人行业发展过程中所研究的重要方向[11].
生活水平的提高以及社会老龄化的加剧,使得服务型机器人有着庞大的市场潜力和需求。服务型机器人的工作环境决定了其夹具的使用特点:通用性好能够抓取不同形状的物体、柔性抓取不宜对物体造成损坏、可重复使用易于维护等。就目前来说,虽然基于服务型机器人的通用夹具研究成果不断,但尚没有一款能够在服务型机器人行业得到大量运用的通用性机械夹具。因此设计一款通用性好、结构简单、能够实现柔性抓取的机械夹具具有很高的现实意义和工程价值。
1.2 几种典型的机械夹具
得益于机器人技术的发展,对于机器人末端执行装置-机械夹具的研究一直是一个比较热门的研究领域,各种通用机械夹具的研制层出不穷,在服务型机器人方面,除了传统的关节型机械夹具,基于柔性材料的软体机械夹具[12]以及基于非晶材料相变模型的抓取装置[13]也都已被开发出来并投入使用。
1.2.1 刚性关节型机械夹具
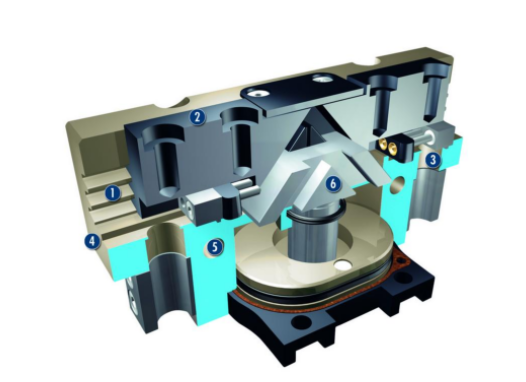
传统关节型通用机械夹具大多都是由两个或两个以上的,能够独立活动的指关节通过运动副连接构成的典型拟人多指结构,主要有执行机构、驱动机构、控制系统三大部分组成,是一个高度集成的、具有多种运动功能和智能化的机电一体化系统,大多由多个驱动器相互配合驱动实现抓取与释放动作,其拟人化的手指结构具有多个自由度,使用灵活;在全球范围内多指拟人机械装取装置是应用广泛、技术成熟、研究活跃的一种类型,并且很多类似的这种机械夹具已经被开发出来并在各行业得到广泛的应用[14].
最近,加拿大 ROBOTIQ 公司推出一款三手指自适应机械夹具,其大小与人手相当,主要由 4 个驱动器和自适应关节机构组成,具有良好的灵活性和多功能性,能够安全稳定的夹取任意形状的目标物体,而只需要将其安装在通用机器人手臂上通过简单的编程实现机械臂与机械夹具的通信[15, 16].

随着现代控制技术和微电子技术的快速发展,传统类型的机械夹具技术也得到了长足的进步,机械夹具由简单抓取发展到复杂轨迹运动、由笨拙缓慢发展到灵巧快速,正在朝着高度智能化感知型发展;就目前来说,传统关节型机械夹具具有抓取稳定可靠、能适应不同形状的目标物体、承载能力强等优点,但也普遍地存在着一些不足[17]:
(1) 机械结构复杂,每个"手指"都由多个活动关节精密配合,整体结构复杂。
(2) 抓取动作的完成都要经过大量的算法计算,响应相对"缓慢".
(3) 刚性抓取,刚性结构在抓取过程中容易造成目标物体损坏。
(4) 整体控制系统复杂、成本高。
1.2.2 软体型机械夹具
软体型机械夹具是一种全新的类型,其以材料科学、机构学和控制科学为基础,应 用柔韧性材料设计制造的一种通用性抓取装置,可在相当大的范围内任意改变自身形状、尺寸等,在某些领域具有广阔的应用前景。其工作原理主要是通过相应的驱动方式(气动-液压驱动、拉线驱动、SMA 驱动及 EAP 驱动)使柔性材料沿某一设定的方向产生变形,以此实现对目标物体的"抓取"与"释放"[18, 19].
作为新一代的抓取装置,国内外众多科研院所与研究机构都对软体机械夹具做出了深入研究并取得了显著成果。其中,比较有代表性的是美国 Soft Robotics 公司与哈佛大学 WHITESIDES 课题组合作将其软体机械手产品推向市场实现商业化,在食品饮料、服务行业得到了应用,并取得很好的应用效果[20, 21].
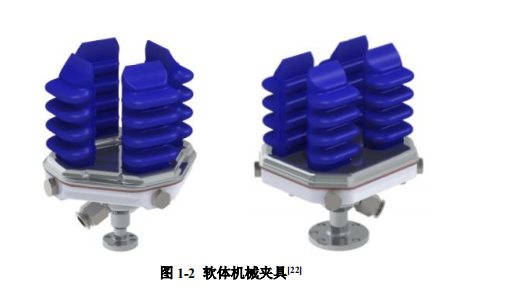
软体机械夹具的应用主要在于发挥软材料的性能优势如连续变形、无限自由度等,而制作材料的不同决定了其不同的使用特点。构成软体机械手本体的柔性材料主要是橡 胶、聚合物、智能材料等,这就决定了其与传统关节型机械夹具相比,软体机械夹具具有结构简单、使用灵活、对于表面复杂物体适应性好、能实现柔性抓取避免对物体的损坏等优点。但同样地软体机器人很大程度上依靠柔性材料,受制作材料的限制导致其承载能力有限,响应缓慢、寿命短、应用范围小以及设计方法、建模与制造技术还不完善等。
1.2.3 材料相变型机械夹具
随着对于材料科学的研究,尤其是相关材料相变模型及机理的研究,发现某些非晶材料通过改变某一外界条件可以实现相性的转变(液-固或固-液等)[23],这一转变过程在机械抓取装置中具有很高的应用价值,目前已经有相关研究人员利用物质的这种相性转变取得了很多实际成果。
物质的相性转变应用中比较有代表性的是基于颗粒性物质的干扰阻塞(Jamming)效 应[24, 25](图 1-3)的新型夹具;芝加哥大学的 Eric Brown, John Amend[26]设计了一种基于颗粒物质干扰阻塞效应的新型通用型夹具(图 1-4),它是由大量的小颗粒物质包裹在一个球状弹性模中,利用空气正-负压的组合迅速地抓取和释放普通机械夹具以抓取的物体,例如扁平的、柔软的、几何形状复杂的物体等。即通过改变物质密度实现其相性的快速转变,表现为类固态的刚性实现抓取效果;与传统机械夹具相比,其具有形状适应性强、控制简单、效率高和成本相对较低等优点[27, 28].
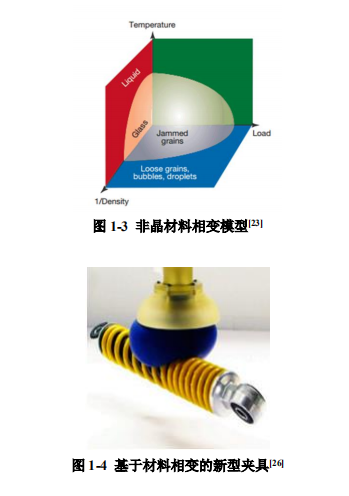
相比于其他两种类型的机械夹具,基于材料相变模型的新型夹取装置具有其独特的特点,但是通过实验测试发现该装置同样存在诸多不足之处,例如:密封性要求高、稳定性差、精度不够、重复利用率低等。
有鉴于目前各种通用性机械夹具存在着或多或少的不足,以及其庞大的市场需求,特别是家庭服务型机器人的夹具要求其能够柔性抓取,避免损伤抓取物、还应具备良好的形状适应性等特点。基于以上要求我们提出一种设想:在充分借鉴上述基于材料相变模型设计的机械夹具的基础上,尝试使用一种新型的、控制简单的能够实现相性转变的智能材料,并在此基础上对装置总体结构做出相关优化来改善装置的工作性能和可操作性,探索设计出一种结构简单、通用性好、稳定性高、能够实现柔性抓取的新型机械夹具。
总体来说,这种相变物质的相关性能应满足以下条件:
(1) 物质相变过程时间短,即响应快速。
(2) 相变所需外界条件易于实现,即控制简单、可靠。
(3) 相变过程中产生的固紧力大,能够使其具有一定的承载能力。
(4) 相变物质自身成本低、转变所用装置简单,成本低。
(5) 相变物质最好能够反复回收利用,不污染环境。
(6) 具有较高的工程应用价值和实际工程应用经验。
科技的进步使得磁流变液这种智能材料得以出现,磁流变液(MagnetorheologicalFluid,简称 MRF)是一种新型智能材料,在外加磁场作用下其能够快速(ms 量级)的实现从液态的牛顿流体到"类固态"Bingham 弹塑性体的可逆性转变[29],即通过外加磁场增 加物质颗粒间相互作用力,实现相性转变;利用 MRF 的这一特性拟设计一种能够适应不同形状的、高效的机械夹具来实现对物体的柔性抓取,同时也能够兼具 MRF 响应好、可逆性好、力学性能可调、易于控制等优点。
加磁场撤除之后,MRF 又恢复原,即在液态和固态之间进行快速、可逆的转换[38].
1.3 磁流变液及其基本性能研究
1.3.1 磁流变液的组成及分类
1.3.2 磁流变效应及其流变机理
1.3.3 磁流变液的研究进展
1.4 磁流变夹具的研究现状
1.5 本论文的研究目标和主要内容
第 2 章 磁流变液的配制及其性能表征
2.1 引言
2.2 磁流变液的制备
2.2.1 相关原料及设备的选择
2.2.2 磁流变液的制备
2.3 磁流变液挤压与拉伸力学性能研究
2.3.1 实验平台设计
2.3.2 等体积挤压实验
2.3.3 等体积拉伸实验
2.4 磁流变液的稳定性与预结构化研究
2.4.1 磁流变液的稳定性研究
2.4.2 磁流变液的预结构化研究
2.5 本章小结
第 3 章 基于磁流变效应的机械夹具的设计
3.1 引言
3.2 磁流变夹具的功能和特点
3.3 磁流变夹具的设计
3.3.1 磁流变夹具的整体设计
3.3.2 磁流变夹具的工作原理
3.4 电磁线圈的设计及仿真分析
3.4.1 电磁线圈的设计
3.4.2 磁场的有限元分析
3.5 磁流变夹具的试验研究及改进方案
3.5.1 磁流变夹具的抓取试验研究
3.5.2 工作机理及优化方案
3.6 本章小结
第 4 章 磁流变机械夹具的改进型设计
4.1 引言
4.2 磁流变夹具的改进设计
4.2.1 磁流变夹具的整体设计
4.2.2 磁流变夹具的工作原理
4.3 磁路计算及电磁线圈的设计
4.3.1 磁路设计基本原理
4.3.2 磁路材料的选择
4.3.3 磁路的设计及计算
4.3.4 电磁线圈的设计及计算
4.4 磁场的有限元分析
4.5 本章小结
第 5 章 磁流变夹具的抓取实验研究
5.1 引言
5.2 磁流变夹具及其主要性能分析
5.2.1 磁流变夹具的装配与检测
5.2.2 磁流变夹具的主要性能分析
5.3 磁流变夹具的通用性实验研究
5.3.1 通用性实验平台设计
5.3.2 通用性实验及其结果分析
5.4 磁流变夹具的抓取能力实验研究
5.4.1 抓取能力实验平台设计
5.4.2 抓取能力实验结果及分析
5.5 本章小结
第 6 章 结论与展望
6.1 结论
针对传统机械夹具通用性差、结构复杂、刚性抓取易损坏物体等问题。本文将智能材料与机械结构设计相结合,选定响应快速、力学性能可调、可逆性好的智能材料 MRF,设计一款基于磁流变效应的通用机械夹具,并对其进行优化改进与实验研究,主要研究工作如下:
(1)配制出 MRF 样品,基于其在机械夹具中的工作模式,进行拉压力学性能实验,得到 MRF 拉压作用下的应力应变关系。通过研究其沉降稳定性和预结构化过程得出MRF 的沉降率为 3.2%,预结构化所需时间为 2.5s,符合磁流变夹具的应用要求。
(2)设计完成初始型磁流变夹具的整体结构,搭建抓取试验平台并进行抓取试验,结果发现其抓取方式和抓取效果不够理想,为后续改进型设计提供参考依据。
(3)针对初始型磁流变夹具中存在的问题,提出夹具的改进型优化设计方案,对磁路进行设计计算。通过有限元分析发现,改进型设计中 MRF 主要工作区域内磁场分布更加均匀、合理,磁感应强度明显提高,达到 450mT.
(4)搭建磁流变夹具通用性和抓取力实验测试平台,通过实验发现改进型磁流变夹具具有良好的通用性和稳定性,其抓取力的大小与所加电流、抓取物形状及尺寸有关。
6.2 创新点
本文致力于结构简单、通用高效地磁流变机械夹具的开发。主要从 MRF 材料的制备与性能表征、工作原理及作用方式、磁路的设计及规划、整体设计的改进和抓取试验研究等方面逐步推进,设计了一款通用型好、能实现柔性抓取的磁流变夹具并进行了性能表征。其中,主要创新及特色如下:
(1)提出 MRF 以磁流变指套为单位的作用方式,增强磁流变夹具的灵活性和通用性。
(2)建立一种评估磁流变夹具通用性和抓取能力的实验方法,对磁流变夹具的通用性和抓取能力进行实验研究。
6.3 展望本论文在完成磁流变夹具整体设计与实验研究的过程中,还发现如下具有研究意义的问题,需要在以后的工作中继续深入研究与探索。
(1)根据 MRF 配制方法,只配制了一种组分的 MRF.如有条件,可以配制不同组分的 MRF 样品,分别进行试验并比较其性能差别,选出最优样品。
(2)设计的基于赫姆霍兹线圈的 MRF 拉伸、压缩实验平台,由于电源、线圈匝数等原因,产生的匀强磁场最大磁感应强度只有 3000mT 左右,如有条件可在产生较大磁感应强度下进行 MRF 的拉压特性。
(3)实验发现,磁流变夹具虽然具有良好的通用性,但是抓取能力不够突出,可在此基础上对磁流变指套的分布、磁流变指套结构形状等进行分析,以使其抓取能力得到提高。
参 考 文 献
[1] 谭民, 王硕。 机器人技术研究进展[J]. 自动化学报, 2013, 39(7):963-972.
[2] 王田苗, 陶永。 我国工业机器人技术现状与产业化发展战略[J]. 机械工程学报, 2014, 50(9):1-13.
[3] 曲道奎。 中国机器人产业发展现状与展望[J]. 中国科学院院刊, 2015(3):342-346.
[4] 刘辛军, 于靖军, 王国彪,等。 机器人研究进展与科学挑战[J]. 中国科学基金, 2016(5):425-431.
[5] 高峰, 郭为忠。 中国机器人的发展战略思考[J]. 机械工程学报, 2016, 52(7):1-5.
[6] 蒋楠。 基于磁流变液的机器人腿设计及实验研究[D]. 合肥: 中国科学技术大学, 2016.
[7] 傅建中。 智能制造装备的发展现状与趋势[J]. 机电工程, 2014, 31(8):959-962.
[8] 吕铁, 韩娜。 智能制造:全球趋势与中国战略[J]. 人民论坛·学术前沿, 2015(11)。
[9] 刘磊。 浅析机器人的研究现状与发展前景[J]. 科技创新导报, 2016, 13(6):57-58.
[10] 罗志增, 顾培民。 一种单电机驱动多指多关节机械手的设计[J]. 机器人, 2009, 31(6):620-624.
[11] 骆敏舟, 杨秀清, 梅涛。 机器人手爪的研究现状与进展[J]. 机器人技术与应用, 2008(2):24-35.
[12] Giannaccini M E, Georgilas I, Horsfield I, et al. A variable compliance, soft gripper[J]. AutonomousRobots, 2014, 36(1-2):93-107.
[13] Tavakoli M, Marques L, De Almeida A T. Flexirigid, a novel two phase flexible gripper[C]. Ieee/rsjInternational Conference on Intelligent Robots and Systems. IEEE, 2013:5046-5051.
[14] Honarpardaz M, Tarkian M, ?lvander J, et al. Finger design automation for industrial robot grippers:A review[J]. Robotics & Autonomous Systems, 2016, 87:104-119.
[15] Sadun A S, Jalani J, Jamil F. Grasping analysis for a 3-Finger Adaptive Robot Gripper[C]. IEEEInternational Symposium on Robotics and Manufacturing Automation. IEEE, 2017:1-6.
[16] ROBOTIQ company. https://www.robotiq.com/.
[17] Portman, Slutski, Edan. An adaptive locating problem for robotic grasping[J]. Robotica, 2001,19(3):295-304.
[18] 曹玉君, 尚建忠, 梁科山,等。 软体机器人研究现状综述[J]. 机械工程学报, 2012, 48(3):25-33.
[19] 何斌, 王志鹏, 唐海峰。 软体机器人研究综述 [J]. 同济大学学报(自然科学版), 2014,42(10):1596-1603.
[20]Hao Y, Gong Z, Xie Z, et al. Universal soft pneumatic robotic gripper with variable effective length[C].Control Conference. IEEE, 2016:6109-6114.
[21] 张进华, 王韬, 洪军,等。 软体机械手研究综述[J]. 机械工程学报, 2017, 53(13):19-28.
[22] Soft Robotics Inc. https://www.softroboticsinc.com/. [23] Trappe V, Prasad V, Cipelletti L, et al. Jamming phase diagram for attractive particles[J]. Nature, 2001,411(6839):772-775.
[24] Behringer R P. Jamming in granular materials[J]. Comptes Rendus Physique, 2015, 16(1):10-25.
[25] Siemens AON, Hecke M V. Jamming: A simple introduction[J]. Physica A Statistical Mechanics & ItsApplications, 2010, 389(20):4255-4264.
[26] Brown E, Rodenberg N, Amend J, et al. Universal robotic gripper based on the jamming of granularmaterial.[J]. Proceedings of the National Academy of Sciences of the United States of America, 2010,107(44):18809-18814. [27] Amend J R, Brown E, Rodenberg N, et al. A Positive Pressure Universal Gripper Based on theJamming of Granular Material[J]. IEEE Transactions on Robotics, 2012, 28(2):341-350.
[28] Jaeger H M. Celebrating Soft Matter's 10th Anniversary: toward jamming by design[J]. Soft Matter,2014, 11(1):12-27.
[29] De Vicente J, Klingenberg D J, Hidalgoalvarez R. Magnetorheological fluids: a review[J]. Soft Matter,2011, 7(8):3701-3710.
[30] 王鸿云, 郑惠强, 李泳鲜。 磁流变液的研究与应用[J]. 机械设计, 2008, 25(5):1-4.
[31] 张进秋, 张建, 孔亚男,等。 磁流变液及其应用研究综述[J]. 装甲兵工程学院学报, 2010,24(2):5-10.
[32] 曾亿山, 王道明, 高文智。 磁流变传动的研究现状、发展趋势及关键技术[J]. 液压与气动,2016(8):1-9.
[33] 朱红。 实用磁流变液材料制备及性能研究[D]. 合肥: 中国科学技术大学, 2010.
[34] 关新春, 欧进萍, 李金海。 磁流变液组分选择原则及其机理探讨[J]. 化学物理学报(英文版),2001, 14(5):592-596.
[35] Wahid S, Ismail I, Aid S, et al. Magneto-rheological defects and failures: A review[J]. 2016,114(1):1-11. [36] 熊晨熙。 磁流变液沉降稳定性改进方法的研究[D]. 重庆: 重庆大学, 2011.
[37] 王大坤。 羰基铁粉磁流变液特性及其初步应用研究[D]. 重庆: 重庆大学, 2007.
[38] 喻军。 磁流变制动器多领域仿真优化设计及研制[D]. 杭州: 杭州电子科技大学, 2013.
[39] 魏齐龙, 王超, 罗清,等。 磁场作用下磁流变液的流变行为[J]. 磁性材料及器件, 2013(1):6-9.
[40] 肖林京, 王传萍, 朱绪力,等。 磁流变液的流变性能分析[J]. 山东科技大学学报(自然科学版),2016, 35(6):43-48.
[41] Ahamed R, Ferdaus M M, Li Y. Advancement in energy harvesting magneto-rheological fluid damper:A review[J]. Korea-Australia Rheology Journal, 2016, 28(4):355-379.
[42] 刘凤祥, 李津宁, 徐胜男,等。 一种磁流变液制动演示装置的磁路设计[J]. 大学物理实验, 2016,29(4):70-73.
[43] 张法生。 地铁车辆磁流变制动技术研究[D]. 成都: 西南交通大学, 2014.
[44] 张贺。 磁流变制动器的结构设计与性能研究[D]. 长春: 长春工业大学, 2016.
[45] 李海涛, 彭向和, 何国田。 磁流变液机理及行为描述的理论研究现状[J]. 材料导报, 2010,24(3):121-124.
[46] 戚艳红。 新型磁流变阻尼器结构设计与性能分析[D]. 北京: 北京交通大学, 2013.
[47] Bossis G, Lacis S, Meunier A, et al. Magnetorheological fluids[J]. Journal of Magnetism & MagneticMaterials, 2002, 252(1-3):224-228.
[48] Rabinow J.The magnetic fluid clutch[J].Electrical Engineering.1948,67(12):1167-1167.
[49] Carlson J D. What Makes A Good MR Fluid?[J]. Journal of Intelligent Material Systems & Structures,2002, 13(7):431-435.
[50] Susan-Resiga D. A Rheological Model for Magneto-rheological Fluids[J]. Journal of IntelligentMaterial Systems & Structures, 2009, 20(8):1001-1010.
[51] Tao R. Super-strong magneto-rheological fluids[J]. Journal of Physics Condensed Matter, 2001,13(50): 979-999.
[52] See H, Tanner R. Shear rate dependence of the normal force of a magnetorheological suspension[J].Rheologica Acta, 2002, 42(42):166-170.
[53] Bombard A, Knobel M, Alcantara M R, et al. Evaluation of magnetorheological suspensions based oncarbonyl iron powders[J]. Journal of Intelligent Material Systems & Structures, 2002, 13(13):471-478.
[54] Klevinskis A, Bu?inskas V, Udris D. Theoretical research of mechanical behaviour ofmagneto-rheological fluid[J]. Mechanika, 2013, 19(5):539-543.
[55] Gen? S, Phulé P P. Rheological properties of magnetorheological fluids[J]. Smart Materials & Structures, 2002, 11(1):140.
[56] 江万权, 张燕丽, 宣守虎,等。 线状纳米铁对羰基铁磁流变液性能的影响[C]. 宁波: 全国电磁流变液及其应用学术会议。 2011.
[57] 司鹄, 彭向和。 磁流变材料的流变性能研究[J]. 材料科学与工程学报, 2002, 20(1):61-63.
[58] 宣守虎, 张燕丽, 周玉凤,等。 相变型磁流变材料的制备与力学性能研究[C]. 宁波: 全国电磁流变液及其应用学术会议程序册及。 2011.
[59] 田祖织, 侯友夫。 磁流变液屈服应力计算模型研究[J]. 中国矿业大学学报, 2012, 41(2):299-309.
[60] 唐龙, 岳恩, 罗顺安,等。 磁流变液温度特性研究[J]. 功能材料, 2011, 42(6): 1065-1067.
[61] 中国科技大学智能材料和振动控制实验室。 http://gong.ustc.edu.cn/. [62] Li F, Tao C. Research on magneto-rheological technology and its application[C]. Control and DecisionConference. IEEE, 2011:4072-4076.
[63] 路和, 刘新华。 磁流变液及其在机械工程中的应用[J]. 制造技术与机床, 2013(1):66-70.
[64] 杨健健, 晏华, 代军,等。 磁流变液材料的性能与应用综述[J]. 化工进展, 2017, 36(1):247-260.
[65] Tang X, Zhang X, Tao R. Flexible fixture device with Magneto-Rheological fluids[M].
Electro-Rheological Fluids And Magneto-Rheological Suspensions. 1999:700-708.
[66] Pettersson A, Davis S, Gray J O, et al. Design of a magnetorheological robot gripper for handling ofdelicate food products with varying shapes[J]. Journal of Food Engineering, 2010, 98(3):332-338.
[67] Nishida T, Okatani Y, Tadakuma K. Development of Universal Robot Gripper Using MRα Fluid[J].
International Journal of Humanoid Robotics, 2014, 13:231-235. [68] Liu Q, Jing T, Mo A, et al. A novel robot hand with the magneto-rheological fluid solidification[C].
IEEE International Conference on Robotics and Biomimetics. IEEE, 2015:2495-2500.
[69] 景甜甜。 基于磁流变液的被动自适应机器人灵巧手研究[D]. 马鞍山: 安徽工业大学, 2016.
[70] 周峰。 磁流变液的制备及其稳定性研究[D]. 上海: 上海工程技术大学, 2016.
[71] 易成建。 磁流变液:制备、性能测试与本构模型[D]. 重庆: 重庆大学, 2011.
[72] 胡志德, 晏华, 陈淑莲,等。 羰基铁粉类型及含量对磁流变液摩擦性能的影响[J]. 润滑与密封,2012, 37(4):24-28.
[73] 孔亚男, 张进秋, 张建。 一种改进型的磁流变液制备工艺研究[J]. 新技术新工艺, 2010(7):87-89.
[74] 王建。 传动磁流变液的制备及其特性研究[D]. 徐州: 中国矿业大学, 2014.
[75] Zhu X, Jing X, Cheng L. Magnetorheological fluid dampers: A review on structure design andanalysis[J]. Journal of Intelligent Material Systems & Structures, 2012, 28(3):839-873.
[76] 李鸽鸽, 刘保国, 董亚军。 磁流变体在机械工程中的应用综述[J]. 机械强度, 2015, 37(2):219-225.
[77] Olabi A G, Grunwald A. Design and application of magneto-rheological fluid[J]. Materials & Design,2007, 28(10):2658-2664.
[78] 郭朝阳。 磁流变液法向力及减振器研究[D]. 合肥: 中国科学技术大学, 2013.
[79] 许阳光。 新型磁敏智能软材料(磁流变塑性体)的制备,表征及机理研究[D]. 合肥: 中国科学技术大学, 2014.
[80] 阮晓辉。 磁流变液力学性能及其应用研究[D]. 合肥: 中国科学技术大学; 2017.
[81] Becnel A C, Sherman S G, Hu W, et al. Squeeze strengthening of magnetorheological fluids usingmixed mode operation[J]. Journal of Applied Physics, 2015, 117(17):1308-1315.
[82] 赵春伟。 基于微结构的磁流变液力学性能研究[D]. 重庆: 重庆大学, 2014.
[83] 陈庆庆。 磁流变液挤压力学特性研究[D]. 徐州: 中国矿业大学, 2014.
[84] Mazlan S A, Ekreem N B, Olabi A G. The performance of magnetorheological fluid in squeezemode[J]. Smart Materials & Structures, 2007, 16(5):1678-1682.
[85] Mazlan S A, Ekreem N B, Olabi A G. An investigation of the behaviour of magnetorheological fluidsin compression mode[J]. Journal of Materials Processing Technology, 2008, 201(1-3):780-785.
[86] 王鸿云, 高春甫, 阚君武,等。 磁场作用下磁流变液的挤压与拉伸特性[J]. 光学精密工程, 2011,19(4):850-856.
[87] 陈飞。 磁流变液制备及动力传动技术研究[D]. 徐州: 中国矿业大学, 2013.
[88] Yao X Y, Fu J, Yu M. Magnetic-enhanced normal force of magnetorheological fluids[J]. SmartMaterials & Structures, 2015, 24(3):035001.
[89] 林其壬, 赵佑民。 磁路设计原理[M]. 北京: 机械工业出版社, 1987.
[90] 熊光 洁 , 张元 培 , 李宁 . 磁流变制 动器电磁装置的 有限元分 析 [J]. 制造技 术与机床 ,2007(12):106-109.
[91] Farjoud A, Bagherpour E A. Electromagnet design for magneto-rheological devices[J]. Journal ofIntelligent Material Systems & Structures, 2016, 27(1):51-70.
[92] CAE 应用联盟组, CAE 应用联盟。 ANSYS 16.0 有限元分析入门 进阶 精通[M]. 北京: 机械工业出版社, 2016.
[93] 向洋。 基于多领域联合仿真的磁流变减振器设计[D]. 成都: 电子科技大学, 2013.
[94] 曹渊。 ANSYS 16.0 有限元分析从入门到精通[M]. 北京: 电子工业出版社, 2015.
[95] 张红松。 ANSYS 14.0 电磁学有限元分析从入门到精通[M]. 北京: 机械工业出版社, 2013.
[96] 王鸿明, 段玉生, 王艳丹。 电工与电子技术-第 2 版[M]. 北京: 高等教育出版社, 2009.
[97] 秦曾煌。 电工学。第 7 版[M]. 北京: 高等教育出版社, 2009.
[98] 王以真。 实用磁路设计[M]. 北京: 国防工业出版社, 2008.
[99] 刘成。 磁流变液制动器的分析与设计[D]. 重庆: 重庆理工大学, 2010.
[100] Nguyen Q H, Lang V T, Choi S B. Optimal design and selection of magneto-rheological brake typesbased on braking torque and mass[J]. Smart Materials & Structures, 2015, 24(6):1-10.
[101] 赵丹侠, 廖昌荣, 刘琼,等。 磁流变液减振器的磁路设计方法研究[J]. 功能材料与器件学报,2012, 18(2):159-164.
[102] 潘杰锋。 磁流变减振器结构设计及优化[D]. 重庆: 重庆大学, 2010.
致 谢
时间总会留下些什么,三年的研究生生涯,让我成长颇多。实验成功时的喜悦与感动、遇到困难时的失落与无奈、不如意时的惆怅与孤独,都在不断地造就一个坚强、优秀的自己。在内心深处始终感激那些引导我、激励我、帮助我的人。
首先我要真诚地感谢我的导师张泰华教授,张泰华老师以他严谨的治学态度,渊博的专业知识,实事求是的科研精神,高度的责任心深刻的鞭策着我,指引着我,鼓励着我,让我能够有条件、有机会沉下心去专心科研工作。
其次,我要衷心地感谢蒋伟峰老师。感谢蒋老师在科研方向上对我的指导和建议,在学位论文总体结构上的把控与指导,以及在实验阶段对我的帮助与建议,让我的科研工作能够顺利的进行。在论文写作方面蒋老师更教会了我一套查找问题、分析问题、解决问题的方法,使我受益匪浅。
我也要感谢课题组其他老师在我研究生期间对我的指点和帮助。感谢实验室同门师兄弟们对我生活和学习方面的关心与帮助,让我能够在三年研究生学习期间获得更多的快乐与感动。
最后感谢我的父母与家人,感谢你们的照顾、关心、理解与支持,感谢你们对我的付出和温暖,我才能够坚持下来并一步一步地走到现在,能够不断地进步与提高,谢谢你们!
(如您需要查看本篇毕业设计全文,请您联系客服索取)