24小时论文定制热线
24小时论文定制热线
摘要
在交通拥堵的城市快速找到最优的泊车位是一个较难的问题,而由泊车引起的事故也越来越多,因此,寻车位难和泊车难的问题得到广泛关注。本文针对这两个问题进行深入研巧。主要研究内容概括如下:
(1)针对在起于饱和的停车场寻车位难的问题,通过车载自组织网络交换可用泊车位信息传达给感兴趣的司机。在泊车位和车辆相关的区域内有效传播可用泊车位信息,一个适当的协议是必要的。此外,多个车辆对同一个车位感兴趣将导致车辆之间的竞争。为了解决这个问题,本文弹细介绍了车辆的预订协议,通过车载自组织网络有效地分配泊车位,并避免了车辆么间的竞争。
(2)针对低速平行泊车转向工况,本文提出一种自动泊车路径规划方法。路径规划方法由两部分组成。首先,车辆的运动学模型具有相应的几何形状,用来创建一个泊车路径,并考虑当空间狭小时,通过多次微调实现泊车,此路径由圆弧构成;其次,考虑曲率连续性采用回旋曲线设计路径。并通过matl油仿真实验验证其有效性。
(3)将自抗扰控制(Active Disturbance Rejection Control,简称 ADRC)方法应用到低速泊车路径跟踪中,提髙了车辆泊车精度侧向控制问题。考虑巧车速度变化、转向机械部分运动学模型不确定性及转向系统延迟,建立基于ADRC方法的路径跟踪控制器。利用实验车进行平行泊车系统实车测试,验证了路径跟踪控制器的有效性。
关键词:泊车位;车载自组织网络;自动泊车:自抗扰;
Abstract
Finding a parking space in the city of traffic congestion becomes extremelydifficult and tee number of accidents caused by parking fast increases. The difficulty offinding a parking space and parking have received more and more attention. For thetwo problems: this paper canies on the further research deeply. The main researchcontents are summarized as follows:
(1) We study the difficulty in finding parking spaces problem of saturated parkinglot. By exchanging available parking information in a vehicular ad hoc network(VANET), drivers can receive interesting information while driving. A suitableprotocol is nceded te dkseminate tee available parking information efficiently withinthe are where they are relevant. Moreover, msuch competitive context where eachvehicle may be interested in a resource, to solve this problem, we detail in this paper areservation protecol that efficiently allocates parking spaces in vehicular ad hocnetworks and avoids the compeetion among teevhicles.
(2)Automatic parking pate planning is put forward for parallel parking steeringsituation. The path-planning method consists of two parts. First, the kinematic modelof the vehicle, wite corresponding geometry, is used te create a path te park the vehiclein one or more maneuvers if the spot is very narrow. This path is contituted of circlearcs. Second,teis path is transformed into a continuous- curvature path using clothoidcurv Using matlab simulatibn for tests,tee teSt Ksults verify tee effectiveness.
(3) Active disturbance rejection control (ADRC) method is applied in pathtracking fbr tee first time, which can solve the precision lateral control problem whentee vehicle is parking in a low speed. During parallel parking,tee parking speed isaffected by tee external disturbance owing to tee roughncM of road surface and roadbumps,tee model uncertainty is existed in steering kinematics for the complex steeringmechanism, and there is a delay time in the steering system. In order to dimmish theimpacts of external disturbance,model uncertainty and steering system delay on pathtracking, the path tracking controller based on ADRC method is built. Using theexperimental vehicle for real vehicle tests,the test results verify the effectiveness ofthe path tracking controller.
Key Words; parking space; VANET; aWomatic parking; ADRC;
随着社会进步和经济的发展,汽车逐渐从一种运输或代步工具转变为人们生活和工作中的重要组成部分。伴随着人工智能的迅猛发展,汽车由人为的机械操作逐渐转变为机械的智能化。汽车技术包含了多口学科,其中包括:自动控制、人工智能、优化理论、传感器技术、信号处理、图像处理、通信技术、信息融合等。随着人民生活条件的日益改善,人们对汽车性能的要求也在不断提高,汽车消费者们要求车辆,不但要具备较高的操纵稳定性、良好的乘坐舒适性、可观的燃油经济性,还要具有较高的驾驶安全性。人口数量的增加化及城市建筑设施的不断扩増,使有限的城市空间变得拥挤不堪,汽车数量的逐年增加,不仅导致交通日趋拥堵,也使得在城市寻找一个巧车位变得困难,并且泊车空间也随么减少。
由于城市汽车数量巨大,寻找一个泊车位不仅变得异常困难,同时也增加了交通拥挤。寻找泊车位是城市交通拥堵的基本姐成部分C在城市5%~10%交通拥堵是因为寻找泊车位造成的和在小街道交通拥堵则岛达60%)。此外,由于汽车尾气的排放,导致燃料消耗和环境污染。迅速的寻找到一个泊车位不仅可节省时间,而且可レッ节能减排。参考文献凹分析了如何快速的寻找一个泊车位。同样,从伦敦帝国学院(帝国学院的城市能源系统项目)的一项研究中了解到,在拥挤的城化花在寻找一个泊车位的消耗占总燃料的40%。据唐纳德博:t的研究叫在美国游戏软件公司(商业区旁边的加利福尼亚大学,校园洛杉抓)捜索泊车位导致每年约47000加仑的汽油消耗、730吨的二氧化碳排放量和95000小时(H年)的时间浪费。所W快速合理的分配一个泊车位,不仅能达到节能减排的目的,同时可W解决一部分交通拥堵问题。
汽车保有量的增长也使得城市交通、居民小区、街道、停车场等公共环境变得异常拥堵,同时也造成了可用的泊车空间减少。另一方面伴随着新手司机的増加和老司机的操作失误,导致的各种交通事故也很多。美国密歇根大学交通研巧所根据交通事故发生数据和保险公司事故发生数据进行了统计并分析,结果表明泊车导致的交通事故占到总事故的44%w,其中倒车泊车过程中发生碰挂占到了泊车事故的1/2到1/3。
车位变量分析示意图
两个最小转弯半径组成的泊车路径示意图
所需泊车位的最小长度和宽度示意图
向前泊车最小车位长度和宽度分析示意图
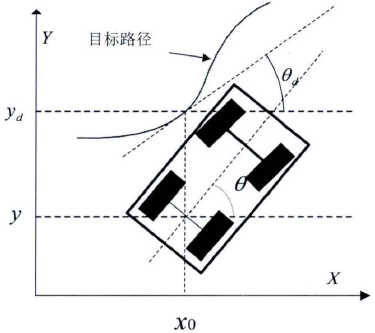
误差分析示意图
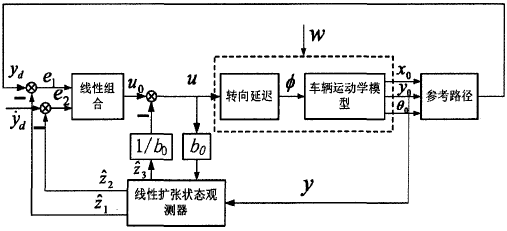
线性自抗扰路径跟踪控制器
目录
第一章 绪论
1.1 研究背景及意义
1.2 国内外研究现状
1.2.1 车载自组织网络的巧车调度研究现状
1.2.2 自动泊车研究现状
1.3 本文研究内容
1.4 本文组织结构
第二章 基于车载自沮织网络的泊车调度
2.1 泊车位的相关性
2.1.1 车辆共享系统设计
2.1.2 相遇概率
2.2 泊车位的分配协议
2.3 本章小结
第三章 平行泊车的系统建模
3.1 泊车相关参数描述
3.2 泊车运动学模型分析
3.3 本章小结
第四章 平行自动泊车的路径设计
4.1 凡何平行泊车
4.1.1 平行拍车策略
4.1.2 泊车位空间受限泊车设计
4.1.3 泊车出库设计
4.2 回旋曲线平行泊车
4.2.1 回旋曲线
4.2.2 泊车路径设计
4.3 MATLAB 仿真
4.4 本章小节
第五章 平行自动泊车路径跟踪控制
5.1 考虑外扰的运动学建模
5.2 线性自抗扰控制器设计
5.3 仿真及实验
5.3.1 Matlab 油仿真
5.3.2 泊车实验
5.4 本章小结
第六章 总结与展望
6.1 总结
6.2 展望
参考文献
致 谢
作者简介