24小时论文定制热线
24小时论文定制热线
摘要
秉持着完成由中国制造向中国智造转变的愿望,越来越多的工程机械的要求不仅仅停留在简单的完成规定动作,而是需要突破重载条件下液压机械臂稳定夹持、液压关键单元、功率匹配等关键技术,从而实现高精度控制的目的.论文以7自由度的重载机械臂为研究对象,针对其机械结构部分与液压驱动部分进行分析研究,机械部分是液压控制的前提,因此首先对机械部分进行分析后设计相关液压系统,并依据机械臂技术要求对液压系统进行优化.具体研究内容如下:
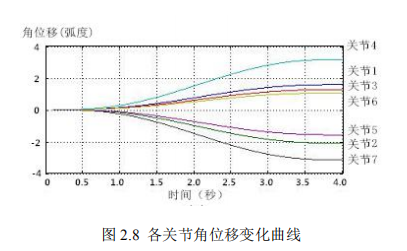
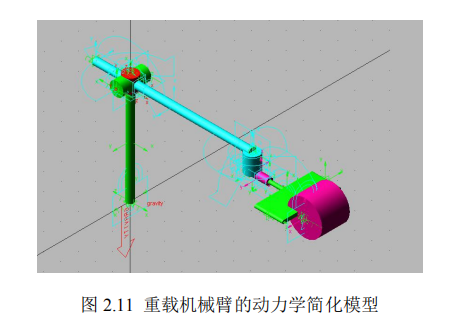
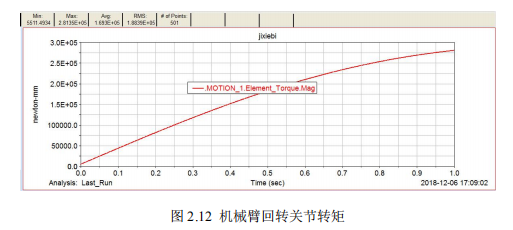
(1)对机械臂的实际工况进行分析,明确机械臂结构类型.在运动学分析上,运用D-H坐标法对机械臂结构与连杆参数进行分析,构建机械臂运动学方程,利用Matlab进行运动学仿真得到机械臂末端的运动轨迹曲线,速度曲线以及位移曲线等从而验证运动学方程建立的正确性.在动力学分析上,通过ADAMS软件进行动力学分析得到各关节转矩与功率曲线图,为后续液压系统设计的参数选取提供参考.
(2)研究液压系统基本回路的特点并根据对机械臂液压系统的技术要求,参考类似机械臂液压系统原理,设计符合液压重载机械臂工作要求的液压系统,并深入分析研究负载敏感技术原理,采用以负载的反馈压力控制变量泵的输出流量,使其随负载变化而变化的负载敏感泵控式系统,并分析其动态特性,建立数学模型,得到系统的传递函数框图和开环传递函数.
(3)采用AMESim对液压系统进行仿真,针对不同的技术要求使用不同的仿真模型进行仿真.通过建立位置反馈控制模型,得到输入信号与实际位移的对比曲线,验证系统位置反馈控制效果;通过建立负载敏感系统模型,得到负载敏感泵输出压力随负载变化的曲线,验证负载敏感系统对于整体系统的作用效果.
(4)运用AMESim软件中的二维机械库与液压库构建机液耦合系统模型,将机械臂机械部分与液压驱动部分的仿真联合在一起,为液压部分与机械部分整体的耦合仿真提供思路.
关键词:重载机械臂,液压系统,AMESim,软件仿真
Abstract
Holding the desire to realize the transformation from made in China to made with wisdom, more and more engineering machinery not only demands to complete the simple prescribed actions, but also requires breaking through the key technologies under the heavy load conditions, such as the stable holding of the hydraulic manipulator and the key hydraulic units, and power matching, etc, thus realizing the high precision control. This paper takes the 7 DOF heavy-duty manipulator as the research object and analyzes the mechanical structure part and the hydraulic drive part. The mechanical part is the premise of hydraulic control. Therefore, the paper firstly analyzes the mechanical part, and then designs the related hydraulic system which is optimized according to the technical requirements of the manipulator. The detailed research contents are as follows:
(1)Analyze the actual working conditions of the manipulator and define its structure type. In kinematics analysis, D-H coordinate method is used to analyze the structure and connecting rod parameters of the manipulator so as to construct the kinematics equation of the manipulator. The kinematics simulation based on Matlab is carried out to obtain the moving-track curve, the velocity curve and displacement curve of the end of the manipulator, which are used to validate the correctness of the kinematics equation. In dynamic analysis, each joint torque and power curve are obtained by dynamic analysis with ADAMS software, which provides a reference for the parameter selection of the subsequent hydraulic system design.
(2)Study the characteristics of the basic circuit of the hydraulic system. According to the technical requirements of the hydraulic system of the mechanical arm and referring to the similar principle of the hydraulic system of mechanical arm, the hydraulic system which meets the demands of the work of the hydraulic heavy duty manipulator is designed. The principle of load sensitive technology is deeply analyzed and studied. The output flow of variable pump is controlled by feedback pressure of load, which makes the load sensitive pump control system change with load, and its dynamic characteristic is analyzed, and the mathematical model is established to obtain block diagram of transfer function and open loop transfer function.
(3)Simulate hydraulic system with AMESim software and use different simulation models for different technical requirements to complete the process. Through establishing the position feedback control model, the contrast curve between the input signal and the actual displacement is obtained, and the effect of the system position feedback control is verified. Through establishing the load sensitive system model, the output pressure curve of the load sensitive pump with the load change is obtained, and the effect of the load sensitive system on the whole system is verified.
(4)Use the two-dimensional mechanical library and hydraulic storehouse he mechanical-liquid coupling system model in AMESim software to combine the simulation between the mechanical part of the manipulator and the hydraulic driving part, which provides the suggestion for the whole coupling simulation of the hydraulic part and the mechanical part.
Key words:Heavy-duty manipulator,hydraulic system,AMESim software simulation
目 录
第一章 绪论...............................................................................................................................1
1.1 研究背景及意义.................................................................................................... 1
1.1.1 研究背景.....................................................................................................1
1.1.2 研究意义.....................................................................................................2
1.2 重载机械臂研究现状............................................................................................ 3
1.2.1 国外研究现状.............................................................................................4
1.2.2 国内研究现状.............................................................................................4
1.3 主要研究内容....................................................................................................... 6
第二章 重载机械臂结构设计和运动学分析...........................................................................7
2.1 重载机械臂性能要求............................................................................................ 7
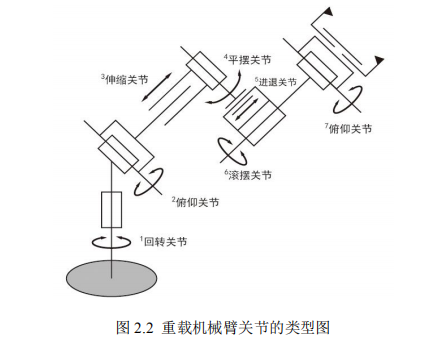
2.2 重载机械臂工作原理与结构组成........................................................................ 7
2.2.1 重载机械臂基本工况.................................................................................7
2.2.2 重载机械臂结构组成.................................................................................8
2.3 重载机械臂运动学分析与仿真............................................................................ 8
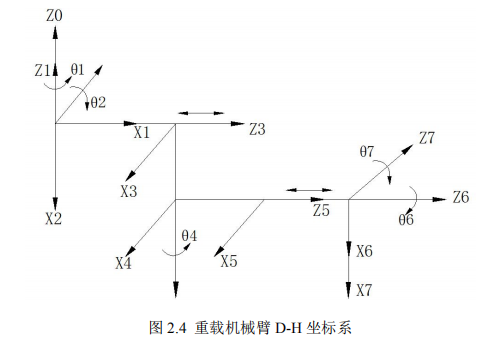
2.3.1 机械臂坐标系的建立及 D-H 参数.............................................................9
2.3.2 机械臂运动学方程的建立.......................................................................10
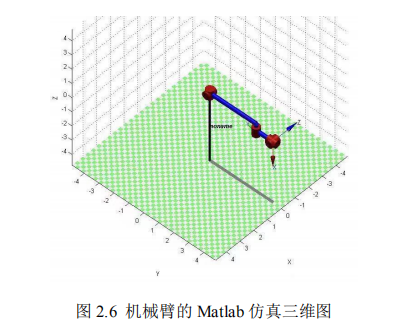
2.3.3 机械臂运动学建模...................................................................................14
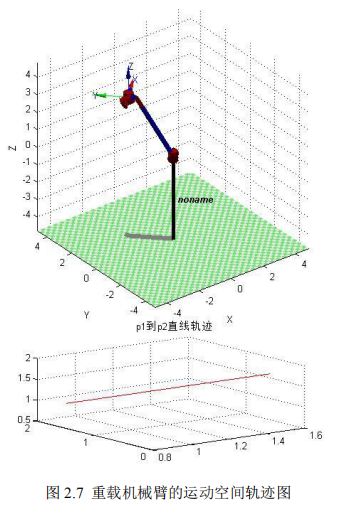
2.3.4 机械臂运动学仿真...................................................................................15
2.4 重载机械臂动力学仿真...................................................................................... 18
2.4.1 软件介绍...................................................................................................18
2.4.2 模型建立与仿真.......................................................................................18
2.5 本章小结.............................................................................................................. 22
第三章 重载机械臂液压系统设计与系统性能分析.............................................................23
3.1 重载机械臂液压系统原理的设计...................................................................... 23
3.1.1 液压系统技术要求...................................................................................24
3.1.2 液压系统原理分析...................................................................................24
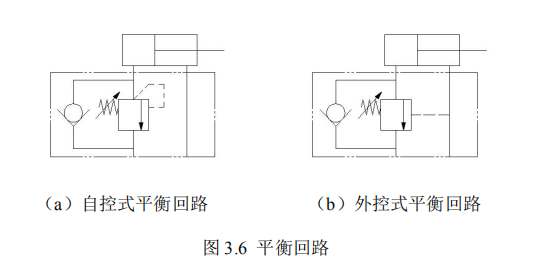
3.1.3 液压回路组成与分析...............................................................................24
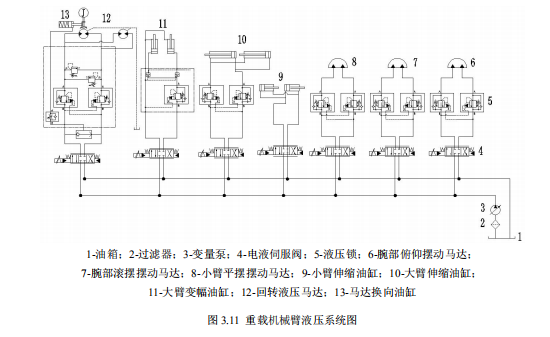
3.1.4 液压系统设计...........................................................................................30
3.2 液压系统数学模型的建立与分析...................................................................... 30
3.2.1 负载敏感泵控工作原理...........................................................................31
3.2.2 负载敏感泵的动态特性分析...................................................................33
3.2.3 负载敏感系统部分液压元件选型...........................................................37
3.3 本章小结.............................................................................................................. 38
第四章 基于 AMESim 的液压系统仿真与分析.......................................................................39
4.1 系统仿真介绍...................................................................................................... 39
4.2 重载机械臂液压系统模型建立......................................................................... 39
4.2.1 液压原理图的优化..................................................................................39
4.2.2 液压系统模型搭建..................................................................................41
4.3 液压伺服系统位置控制仿真............................................................................. 41
4.4 负载敏感系统主要元件建模............................................................................. 43
4.4.1 负载敏感阀模型建立...............................................................................44
4.4.2 恒压阀模型建立......................................................................................45
4.4.3 变量泵机构模型建立..............................................................................46
4.4.4 压力补偿阀模型建立..............................................................................47
4.5 负载敏感系统整体 AMESim 建模仿真............................................................... 47
4.6 机液耦合系统仿真............................................................................................. 49
4.7 本章小结............................................................................................................. 51
第五章 总结与展望.................................................................................................................53
5.1 工作总结............................................................................................................. 53
5.2 工作展望............................................................................................................. 53
参考文献...................................................................................................................................55
发表论文和科研情况说明.......................................................................................................59
致 谢...................................................................................................................................60
第一章绪论
1.1研究背景及意义
1.1.1研究背景
近年来,在全球工业领域中的重型工件搬运、装配以及重型装备的维护作业等方面,重载机械臂呈现出越发重要的作用,为我国的航空工程,矿山冶金设备领域等提供了重要的技术支持以及关键的生产安全技术保障.重型机械臂也逐渐成为大负载,高强度的工业生产环境中所不可或缺的核心技术装备,它能够提高工业活动中的工作效率,降低风险发生率,在未来的工业发展中会逐渐取代大部分人力劳动[1,9-10].针对现在国内外的重载液压机械臂的研究状况,对高性能,高强度,大负载的重型液压机械臂的研究进展尚未达到一个较高的水平,尤其是针对机电液控制于一体的重型机械臂的研究还处在刚刚开始的部分,相关的研究资料与方法少之又少,考虑到机械臂的刚柔耦合效应,首要的是要对重载机械臂的刚柔耦合动力学模型完成建立,其中机构设计、动力匹配和重载条件下动态稳定夹持、主动安全等关键技术尚未取得突破,使得刚柔耦合效应的重载机械臂的研发处于瓶颈期[2].
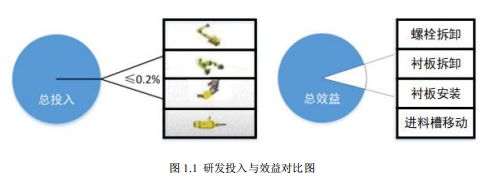
在凡事都讲求经济性与高回报率的当今社会,对某项技术的研究往往为利益所驱动,图1.1为澳大利亚RME公司所给出的对于球磨机更换衬板机械手的科研投入资金占总投入的比例与因该科研成果而获得的效益占总效益的比例的对比图,这种高回报率促使了更多的企业开始愿意将资金投入到对新技术的研发和对现有设备的升级改造之中,论文在此大环境下,针对于能提高效率带来经济效益的重载机械臂相关技术进行研究.
1.1.2研究意义
改革开放至今已有四十年有余,在这四十年期间,我国的工业化文明发展速度显著加快.在此期间,各种类型的机械臂为工业化的发展奠定扎实的基础,在各类的生产实践活动中,需要应用到不同种类的机械器材来代替人类生产活动,从而极大的提高了生产效率[3-4].作为各种机械器材的执行元件,机械臂同时也得了广泛的应用,在应用的过程中进行不断得改善和提高,正是由于机械臂的广泛普及,产品生产的工作精度以及工作效率都得到了质的提高.机械臂是一种在精密复杂的控制程序下,可以模仿人类手臂做多自由度运动的机械器材,在比较复杂,危险的工作环境中可以代替人的活动,这样不仅可以加快工作进度,还可以降低事故的发生几率,机械臂尤其适用于带有重复性性质的工作类型.当前我国的机械臂研究技术可以计算机仿真技术相互联系起来,用软件分析可以来验证机械臂的可行性和合理性.
重型工业在近些年来飞速成长,所以直接推动着重载机械臂的快速进步.在航天,军事工业上,重载机械臂起着至关重要的作用,它是在这样一个生产过程科技化演变的大趋势中发展起来的新装置.重载机械臂与一般的轻型机械臂有着本质的区别,重载机械臂具有高精度,多自由度运动等特点,轻型机械臂可以适应于工作环境较好,工作强度较低的工业场所.而重载机械臂需要面对恶劣的工作环境,同时还需要承受大载荷,高强度的工作压力,所以对于重载机械臂的设计及研究需要在保证完成质量和以提高效率的同时还需要考虑它的强度,刚度分析.又因为重载机械臂承受的载荷大,所以它的及驱动力比一般的轻型机械臂要大得多,故在设计研究时需要综合对其驱动装置进行分析[5].而如图1.2所示的具有多自由度的机器人,具有能在较小的空间完成各种姿态运动的特性.因此对多自由度重载机器人的研究针对于一些狭窄但要求重载的场合十分必要.

综上所述,论文针对7自由度重载机械臂的驱动机构与执行机构进行研究对于工业生产的现实情况是十分必要的,论文针对其工作原理工作特性,对其结构进行运动学动力学分析,并初步设计其液压系统,依靠AMESim进行仿真分析并依照其结果和技术要求对液压系统进行优化.
1.2重载机械臂研究现状
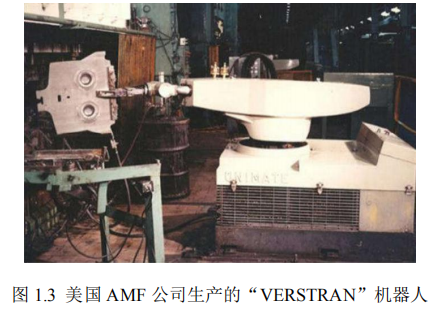
自六七十年前国内外就展开了对机械臂的理论研究及工程应用.20世纪60到70年代,工业生产中出现了可以按照设定程序完成重复性动作的点焊机器人,1962年美国AMF公司生产出"VERSTRAN"(中译为"万能搬运",如图1.3所示),Unimation推出的工业机器人"PUMA"(如图1.4所示)同样作为商业化的工业机器人,在全球范围内被广泛使用,促使全球范围内的对机器人与机器人研究的热情高涨[6].现如今,现代化的工业生产实践中经常会遇到大型负载,需要机械臂在附带重载的工况下作业;随着重载机械臂的应用范围逐渐拓宽,在生产实践时要求重载机械臂高速完成焊接、移动、堆码、装配等动作,国内外研究学者对各种工程重载机械臂的研究也在逐步推进.未来,伴随科学理论研究程度的深入和工程应用设备性能的全面提升,工程领域的相关研究将同机器人学、信息与通讯技术、人工智能和CAD技术等相关专业学科和技术相结合,将使得工程机械向着更高科技化的趋势前进.

1.2.1国外研究现状
国外的工程机械研究起步相对较早,其中设备的设计和开发研究过程大致分为以下三个部分:首先,结合计算机仿真软件,对工程机械结构进行有限元分析,对机构进行运动学和动力学仿真,或者对材料构件进行疲劳寿命计算;然后通过软件分析和算法优化计算,得出所设计机构的各项最优参数;最后根据仿真分析获得的相关结果,设计和制造实物样机.下面自四个方面介绍国外工程机械研究的重点:
(1)对于运动学相关方面的研究早在上个世纪80年代和90年代,就有学者通过分析机械臂的位置、速度、加速度等动态参数,对机械臂的空间轨迹进行优化及预测;之后,在21世纪初期,研究学者开始结合动力学模型,利用具体的工程机械设备,使针对机械臂的理论计算分析更接近实际的工程应用场景.综上所述,国外工程机械臂的研究较多的还是轨迹规划得问题[7-11].
(2)对于智能控制方法相关方面的研究国外研究学者利用角度、方向、激光、视觉等先进传感器设备,结合信号分析技术和智能控制算法,对机械臂空间轨迹进行动态路径规划的研究,使得机械臂在工程作业中,能够实时监测自身的位置和姿态,并反馈设备当前的各项动态数据,自适应调整其行为轨迹;与此同时,通过传感器感知自身的工作状态和周围的工作环境,结合故障诊断分析和自动避障算法,实现了机械臂设备的故障预警、障碍躲避等自动控制功能[12-15].
(3)对于强度寿命相关方面的研究国外研究学者结合工程结构力学和材料力学的内容和分析软件,对工程机械装置的机构强度寿命分析进行了很多研究,其中有限元法应用的较为广泛.学者在科研过程中采用有限元分析法,结合计算机辅助设计软件,得到了工程机械设备的最优工作结构和尺寸,并且还可以通过分析得到机械结构的应力集中区域等危险工作状态,如此一来就增加了设备的安全性与可靠性[16-17].
(4)对于液压控制系统设计相关方面的研究国外研究学者着眼于工业生产设备的工作可靠性、安全性、高效节能性等方面,通过研究压力控制系统和负载敏感系统,来提高压力利用效率,并以此节约能源消耗[17-20].
1.2.2国内研究现状
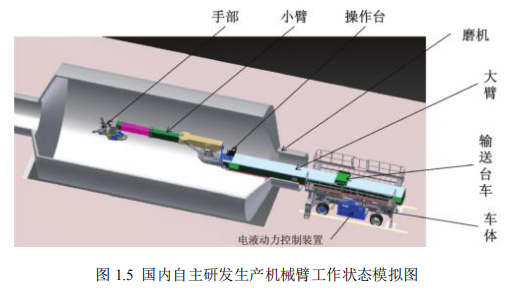
国内的工程机械研究相对于国外起步较晚,但因为基础工业的需求,重型机械臂的研究主要指在能够安全可靠完成指定动作即可,图1.5为国内自主研发生产的重载机械臂的工作状态模拟图.
研究主要以仿真或者软件联合仿真为主.常用的软件有ADAMS、OpenGL、AMESim、MATLAB/Simulink、ANSYS、UG、Pro/E和Solidworks等.国内许多高校及其他研究机构的学者利用计算机仿真软件,在重载机械臂运动学、动力学和控制系统设计等方面开展了广泛的研究,并能不断取得突破性的成果,这使得国内的整体研究水平正在不断向着发达国家靠拢.可以将针对开发出更智能更环保的机械臂的国内研究分为以下四个方面:
(1)运动学分析
在运动学分析方面,国内学者通过不同途径对机械臂轨迹规划进行研究.例如采用D-H表示法建立机器臂模型,得到机械臂的运动学正解和逆解,用以得出机械臂工作时空间位置和速度的映射关系;也有通过分析机械臂末端位置的轨迹变化,反求机械臂旋转关节角度和位移变化关系[21-26].
(2)运动控制系统设计
在运动控制方面,国内侧重于研究控制系统精度及其本身是否稳定方面.国内学者采用模糊PID方法、补偿控制等多种方式算法,研究机械臂系统的轨迹跟踪策略,也有学者针对重载机械臂系统的抖振解决方案,采用模糊滑膜控制的方法,提升了其稳定特性及精度.在系统仿真的基础上,研究者结合传感器感知设备和通讯设备等硬件,实现了机械臂的无线信号传输、远程控制、自适应调参、实时故障报警等功能[27-33].
(3)液压控制系统的设计与改进
在液压方面,国内研究侧重在提升液压整体结构的合理性及参数优化.国内学者采用仿真软件AMESim,对各工程应用场景下的液压控制系统进行仿真实验,或采用AMESim与Simulink的联合仿真,应用AMESim构建完整的液压执行系统,基于Simulink搭建系统控制函数模型以及和AMESim融合的连接函数,最终构造出符合国内加工能力和要求的负载敏感系统,为液压控制方面的研究和工程上面的应用给出了思路[34-44].
(4)在液压负载敏感系统应用的研究方面
在负载敏感控制方面,国内研究侧重于分析系统稳定性,能源利用率,系统动态特性等理论研究.研究者通过研究管路、变量柱塞泵等原件的参数和特性对负载敏感系统的动态特性进行分析;同时结合掘进机等工程机械设备特点对不相同的工作状态时负载敏感系统的工作特性开展研究,最优化系统设计参数,以提高系统对负载的跟随性并减少系统波动[45-55].
1.3主要研究内容
液压重载机械臂主要由驱动部分、执行部分、检测反馈部分、传动部分等多系统结构组成.论文以重载机械臂的机械执行部分与液压驱动部分为对象,针对重载机械臂负载大,自由度多等特点,主要从两大方面进行研究,一是对机械执行部分的运动学动力学的研究,另一方面是对液压驱动部分的设计仿真研究.具体的研究内容如下:
(1)重载机械臂的性能要求分析及对其结构部分进行运动学、动力学分析.针对机械执行机构,需要根据不同工作对象的需求,设计出不同的执行方式.因此对于研究对象重载机械臂,了解了其工作状况下性能要求后,通过MATLAB和ADAMS分别完成运动学动力学的仿真分析.
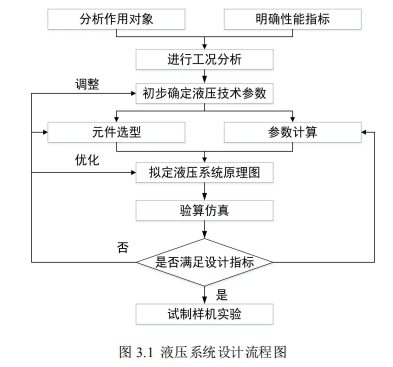
(2)重载机械臂液压驱动系统的技术要求的明确及液压部分原理的设计.针对重载机械臂的驱动机构,液压驱动的特点与其他驱动方式相比在工程机械应用领域中优势突出.分析介绍了液压基本回路的工作原理与特点,结合机械臂系统的总体方案,确定了其工况条件以及各种性能指标,得到液压系统的主要设计技术参数,从而初步设计出该液压系统原理图.
(3)重载机械臂液压系统的控制方法研究.在重载机械臂的控制方法研究中,不同控制目标采用不同控制策略.为提高能源的利用率,液压系统的输出需和负载所需相对应.研究分析了负载敏感方法的特点之后,决定采用该方法.使得系统本身能够接受到负载的变化信号,并转化为相应的液压参数的需要,将需求传递转换为敏感阀芯的移动,使得泵的工作状态发生改变,按照负载所需压力值、流量值等往系统供给相应的油液.
(4)液压驱动系统的仿真分析技术的研究.对于所设计的重载机械臂液压系统,现有的试验台无法达到实验验证的目的,所以结合计算机技术,通过仿真软件对液压驱动系统完成仿真,来证明之前构造的液压系统的功能性是否符合要求,分别证明位置反馈控制与负载敏感控制在整体系统中的作用与设想相符.
…………由于本文篇幅较长,部分内容省略,详细全文见文末附件
第五章总结与展望
5.1工作总结
论文针对重载机械臂机械执行部分与液压驱动部分,依据实际工况分析、技术要求与机械臂运动学动力学仿真,参考现有类似机械臂设备,设计出合理高效的液压系统图,以提高现有机械臂性能.
论文完成了以下内容:
(1)首先对实际工况进行研究明确所需自由度以及运动副类型.运用D-H法构建机械臂连杆坐标系,测量各连杆参数,得到机械臂运动学模型,并通过Matlab进行运动学仿真.在此基础上通过ADAMS软件进行动力学分析得到了各关节转矩与功率,为后续液压系统设计元件选型提供参考.
(2)根据对机械臂液压系统的技术要求与原理的了解,结合液压基本回路的相关知识,设计符合机械臂工作要求的液压系统,并深入学习负载敏感技术,完成动态特性分析并求得负载敏感系统传递函数框图与开环传递函数.
(3)由于机械臂对于定位的精度要求高,因而对液压系统进行优化,构建了机械臂液压缸位置控制模型,并通过AMESim软件进行仿真,得到通过位置控制的方法能取得较好的位移跟随特性.
(4)由于系统的功率损耗多,效率不高,因而为了完成优化,构建了负载敏感系统各元件模型并进行连接设置,并利用AMESim进行仿真,证明了负载敏感原理对系统的作用.
(5)构建了机液耦合一部分模型,并通过AMESim软件完成仿真,结果表明液压系统能够驱动机械部分完成规定动作,直观的证明了液压系统构建的正确性与有效性,并为整体液压部分与机械部分耦合仿真提供思路.
5.2工作展望
论文由于受到时间、硬件设备以及技术条件的限制,只初步的对重载机械臂的机械执行机构与液压驱动机构进行研究.研究限制在理论分析仿真部分,没有进行样机测试实验.因此,若要使得设计的液压重载机械臂能够真正的投入工程生产之中,对未来的工作重点主要是以下几个方面:
(1)系统建模与仿真技术随着计算机技术的迅猛发展,多学科多领域的联合仿真已经进入了实际应用阶段,AMESim提供了多种软件接口,在进一步研究中,可以利用Solidworks搭建3D模型导入ADAMS中,并对重载机械臂运动副关系完成设置,通过接口与AMESim搭建的模型完成联合仿真,能够获得更为精确的数据图形,可以用作重载机械臂整体优化依据.
(2)由于液压系统复杂程度很高,仿真中涉及的参数较多,仿真过程对计算机硬件要求过高,论文仿真仅针对于部分子系统进行仿真分析.若能将整体系统进行联动的仿真,所得结果之于工程实际将更具有意义.
(3)在液压系统位置控制的仿真中,仅使用位置传感器反馈控制,未加入如PID、模糊PID、神经网络等控制算法.若加入控制算法进行优化,控制精度可能更好.
(4)机械臂机械部分都假设为刚体模型.但实际液压重载机械臂中存在着如臂杆柔性、关节柔性与基座柔性等多柔性因素,因此在搭建模型时若考虑这些因素从而选择搭建起刚-柔耦合的有限元动力学模型,得到的结果将更加具有实用的可能.
致谢
本论文的工作是在我的导师郭津津教授的悉心指导下完成的,郭津津教授严谨的治学态度和科学的工作方法给了我极大的帮助和影响.在此衷心感谢三年来郭津津老师对我的关心和指导.
郭津津教授悉心指导我们完成了实验室的科研工作,在学习上和生活上都给予了我很大的关心和帮助,在此向郭津津老师表示衷心的谢意.
郭津津教授对于我的科研工作和论文都提出了许多的宝贵意见,在此表示衷心的感谢.
在实验室工作及撰写论文期间,毛龙锐、李震等同学对我论文中的机械臂动力学研究工作给予了热情帮助,在此向他们表达我的感激之情.
参考文献
[1] Lin C S, Chang P R, Luh J Y S. Formulation and optimization of cubic polynomial joint trajectories for industrial robots[J]. IEEE Transactions on Automatic Control, 1983, AC-28(12): 1066-1074.
[2] 工业机器人发展现状浅谈[J]. 自动化博览, 2007(1): 54-55.
[3] Koivo A J, Thoma M, Kocaoglan E, et al. Modeling and Control of Excavator Dynamics During Digging Operation[J]. Journal of Aerospace Engineering. 1996,9(1):10-18.
[4] Samuel Frimpong, Yafei Hu, Hilary Inyang. Dynamic Modeling of Hydraulic Shovel Excavators for Geomaterials[J]. International Journal of Geomechanics. 2008(8): 20-29.
[5] Ge S S, Lee T H, Harris C J. Adaptive Network Control of Robotic Manipulators[J]. IEEE Transactions on Robotics and Automation. 2003,19(3): 523-524.
[6] D A Bradley, D W Seward. Developing Real time Autonomous Excavation Proceeding of the 34th Conference on Decision & Control. New Orleans, France, 1995(5): 3028-3033.
[7] A S Hall, P R McAree. Robust Bucket Position Tracking for a Large Hydraulic excavator[M]. Mechanism and Machine Theory, 2005, Volume 40, Issue 1: 1-16.
[8] Kohmoto T, Taji T. Hydraulic Excavator Boom and Arm Strength Evaluation Method[J]. R&D, Research and Development(Kobe Steel, Ltd), 1981,31(2): 71-76.
[9] Y Yin, G Y Grondin, K H Obaia. Fatigue Life Prediction of Heavy Mining Equipment. Part 1: Fatigue load assessment and crack growth rate tests[J]. Journal of Constructional Steel Research 2007(63): 1494-1505.
[10] Martin Choux,Hamid Reza Karimi,Geir Hovland, et al, Robust Adaptive Backstepping Control Design for a Nonlinear Hydraulic-Mechanical System[R]. Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference Shanghai, P R China, December 16-18, 2009:2460-2467.
[11] Henrik Pettersson, PetterKrus, Arne Jansson, et al. The Design of Pressure Compensators for Load Sensing Hydraulic control system[R]. Control 96, UKACC International Conference on(Conf Publ No.427), 1996: 1456-1461.
[12] Yasuo Sakurai, Takeshi Nakada, Kazuhiro Tanaka. Design Method of an Intelligent Oil-hydraulic Control System(Load Sensing Oil-hydraulic Control System)[R]. Proceedings of the 2002 IEEE International Symposium on Intelligent Control Vancouver, Canada October 27-30. 2002: 626-630.
[13] Jong II Yoon Ahn Kyoung Kwan, Dinh Quang Truong. A Study on an Energy Saving Electro-Hydraulic Excavator[R]. ICROS-SICE International Joint Conference 2009, Fukuoka International Congress Center, Japan, August 18-21, 2009: 3825-3830.
[14] 孙克义. 液压挖掘机工作装置的动力学分析与仿真[D].兰州理工大学,2014.
[15] 朱晓军. 液压挖掘机的主从控制研究[D].浙江大学,2012.
[16] 朱圣兵. 液压挖掘机器人轨迹跟踪综合控制策略方案研究[D].浙江大学,2006.
[17] 邓子龙,汪亮彬,张林艳,等.液压挖掘机工作装置多体系统动力学仿真研究[J].机械与电子,2009(1 2):33-35.
[18] 解培强. 模糊滑模控制在挖掘机控制中的应用[D].太原科技大学,2014.
[19] 孔德琴. 曲臂高空作业车液压系统的设计研究[D].合肥工业大学,2009.
[20] 赵遵平. SF33900 型电传动矿用自卸车液压系统设计与动态分析[D].中南大学,2008.
[21] 李永旭. 液压挖掘机工作装置与液压系统设计的研究[D].同济大学,2006.
[22] 王欣,曹保忠,宋晓光,等.负载敏感系统抗流量饱和控制仿真研究[J].机床与液压,2010,38(07):103-1 05+98.
[23] 付玉林,陈远玲,程志青,等.负载敏感技术在甘蔗联合收割机上的应用[J].农机化研究,2009,31(03): 14-17.
[24] 张鑫. 3-PSS 并联机构液压伺服系统的设计与研究[D].南京理工大学,2016.
[25] 纪绪. 大吨位履带起重机液压系统的动态特性研究[D].吉林大学,2013.
[26] 黄有义. 大型球磨机衬板更换机械手结构设计及有限元分析[D].吉林大学,2010.
[27] 阚超. 电液伺服与比例压力控制系统辨识与特性比较研究[D].燕山大学,2007.
[28] 周保根. 多自由度液压臂液压系统的研究与开发[D].合肥工业大学,2012.
[29] 王伟伟. 负载敏感系统动态特性与节能分析[D].燕山大学,2011.
[30] 梁学修. 工业机械臂交流伺服控制系统关键技术研究[D].中国农业机械化科学研究院,2017.
[31] 袁亮. 基于 ADAMS 和 AMEsim 的工程机械臂液压控制系统联合仿真研究[D].西南科技大 学,2016.
[32] 刘祚时,格海超,黄高荣.基于AMESim的磨机换衬板机械手液控系统仿真与分析[J].桂林理工大学 学报,2017,37(02):372-376.
[33] 孙 静 , 王 新 民 , 金 国 举 . 基 于 AMESim 的 液 压 位 置 控 制 系 统 动 态 特 性 研 究 [J]. 机 床 与 液 压,2012,40(11):120-122.
[34] 杜爱学. 基于 AMESim 的液压系统控制的建模与改进的仿真技术研究[D].天津理工大学,2018.
[35] 马丽. 基于 MATLAB 的小型码垛机器人机构设计与仿真的研究[D].天津科技大学,2016.
[36] 陈永清,徐其彬,徐新和.基于 Simulink 的液压闭环位置控制系统建模与仿真[J].机床与液 压,2013,41(21):138-142.
[37] 刘 祚 时 , 童 乐 , 黄 高 荣 . 磨 机 换 衬 板 机 械 手 结 构 设 计 及 运 动 学 分 析 [J]. 机 械 设 计 与 制 造,2016(07):85-88+92.
[38] 童乐. 磨机换衬板机械手虚拟样机设计及分析[D].江西理工大学,2016.
[39] 黄付延. 磨机换衬板专用机械手的拓扑优化设计[D].江西理工大学,2017.
[40] 格海超. 磨机换衬机械手液压系统控制与研究[D].江西理工大学,2016.
[41] 张会会. 某机械臂液压系统可靠性分析[D].南京理工大学,2015.
[42] 李飞. 某型六自由度机械臂的运动控制与仿真研究[D].武汉工程大学,2014.
[43] 高涵,张明路,张小俊,高柏军,黄晓辰.七自由度机械臂运动学分析[J].现代制造工程,2017(08):29-33 +77.
[44] 田宏亮. 全液压动力头式钻机液压系统动态分析及控制方法的研究[D].煤炭科学研究总院,2008.
[45] 郑洪波. 伺服直驱泵控液压系统及其节能机理研究[D].广东工业大学,2012.
[46] 刘权庆. 五自由度机械手轨迹规划研究及动力学分析[D].浙江理工大学,2017.
[47] 黄高荣. 新型磨机换衬板机械手运动控制系统设计与分析[D].江西理工大学,2016.
[48] 侯振忠. 液压驱动机械臂设计及其仿真研究[D].长安大学,2017.
[49] 郝鹏. 液压挖掘机动力系统匹配及节能控制研究[D].中南大学,2008.
[50] 李永旭. 液压挖掘机工作装置与液压系统设计的研究[D].同济大学,2006.
[51] 肖清. 液压挖掘机混合动力系统的控制策略与参数匹配研究[D].浙江大学,2008.
[52] 国香恩. 液压挖掘机节能模糊控制系统研究[D].吉林大学,2004.
[53] 胡志坚. 钻机负载自适应液压控制系统的研究[D].吉林大学,2007.
[54] 张鑫. 3-PSS 并联机构液压伺服系统的设计与研究[D].南京理工大学,2016.
[55] Lei Li,Hao Yan,Changchun Li. Research on Temperature Current Drift Characteristics Test of Force Feedback Hydraulic Servo Valve[J]. International Journal of Fluid Machinery and Systems. 2017. 10(4): 328-335.
[56] Dong Liu, Cheng Tang, Shicheng Ding, et al. CFD-DEM Simulation for Distribution and Motion Feature of Crystal Particles in Centrifugal Pump[J]. International Journal of Fluid Machinery and Systems. 2017. 10(4): 378-384.
[57] 李 勇 , 王 继 新 , 郝 万 军 , 等 .MLH2000 型 七 自 由 度 磨 机 换 衬 板 机 械 手 的 研 制 [J]. 矿 山 机 械,2009,37(05):67-70.
[58] Chunyu Jia, Xiuying Liu, Yancao Cui, et al. Modeling and Simulation of Hydraulic Roll Bending System Based on CMAC Neural Network and PID Coupling Control Strategy[J]. Journal of Iron & Steel Research, 2013, 20(10) :17-22.
[59] Jun Yan, Bo Li, Gang Guo, et al. Nonlinear Modeling Identification of the Electro-hydraulic Control System of an Excavator Arm Using BONL Model[J]. Chinese Journal of Mechanical Engineering. 2013, 26(6): 1212-1221.
[60] 程京华. 车载液压机械臂动态设计与研究[D].辽宁工业大学,2016.
[61] 方 秀 荣 , 孟 祥 焱 , 范 海 峰 .大 型 推 弯 式 弯 管 机 超 低 恒 速 液 压 控 制 系 统 研 究 [J]. 机 床 与 液 压,2017,45(19):61-64.
[62] 周保根. 多自由度液压臂液压系统的研究与开发[D].合肥工业大学,2012.
[63] 胡 玉 龙 , 刘 会 勇 , 罗 杨 , 等 . 负 载 敏 感 比 例 多 路 阀 的 建 模 与 仿 真 [J]. 机 床 与 液 压,2017,45(01):118-120+132.
[64] 陈 随 英 , 赵 建 军 , 毛 恩 荣 , 等 . 负 载 敏 感 变 量 泵 结 构 建 模 与 性 能 分 析 [J]. 农 业 工 程 学 报,2017,33(03):40-49.
[65] 刘 榛 , 卢 堃 , 陆 初 觉 .负 载 敏 感 变 量 泵 中 负 载 敏 感 阀 的 设 计 与 分 析 [J]. 兰 州 理 工 大 学 学 报,2005(06):55-58.
[66] 李建明,陈飞,渠立红.负载敏感液压系统仿真分析[J].煤矿机械,2011,32(07):53-56.
[67] 王振德,刘文东,张锋,等.负载敏感在采煤机液压系统中的应用[J].煤矿机械,2011,32(09):188-190.
[68] 耿令新,刘钊,吴仁智,等.工程机械负载敏感技术节能原理及应用[J].机械传动,2008(05):85-87.
[69] 张会会.供料机械臂液压系统动态可靠性研究[J].机械制造与自动化,2016,45(03):169-171.
[70] 张刚. 机器人机械臂的动力学分析及其拓扑优化设计[D].宁波大学,2012.
[71] 刘磊. 机械臂操作柔性负载系统柔顺控制方法研究[D].吉林大学,2009.
[72] 覃海强. 机械臂力/位置混合控制方法研究[D].重庆大学,2013.
[73] 袁士豪,殷晨波,刘世豪.机械负载敏感定量泵系统性能分析[J].农业工程学报,2013,29(13):38-45.
[74] 袁亮. 基于 ADAMS 和 AMEsim 的工程机械臂液压控制系统联合仿真研究[D].西南科技大 学,2016.
[75] 王光磊,同志学,张战平,等.基于 AMESim 的液压机械手负载敏感系统仿真研究[J].矿山机 械,2011,39(12):105-109.
[76] 吴 正 明 , 史 青 录 , 白 鹏 伟 , 等 . 基 于 AMESim 负 载 敏 感 系 统 的 仿 真 分 析 [J]. 工 程 机 械,2013,44(01):38-41+1.
[77] 仲作阳,孟光,荆建平,等.基于 Modelica 的泵车负载敏感型比例多路阀的建模与仿真[J].机床与液 压,2012,40(21):135-137+176.
[78] 张剑. 六自由度串联机械臂精度控制研究[D].重庆交通大学,2016.
[79] 宋海涛. 履带钻机负载敏感液压系统的研究[D].中国地质大学,2008.
[80] 黄 刚 , 汤 漾 平 , 李 小 平 . 面 向 对 象 的 液 压 系 统 的 描 述 及 原 理 图 的 自 动 识 别 [J]. 机 电 一 体 化,2000(06):51-53.
[81] 杨溢,耿洪臣.磨机换衬板机械手的发展情况[J].中国重型装备,2009(01):44-46.
[82] 刘健泉. 柔顺拆装机械臂研制及其动力学特性研究[D].哈尔滨工业大学,2015.
[83] 何谦.数字阀控重载机械臂液压同步举升系统设计与仿真[J].轻工科技,2014,30(01):36-37.
[84] 李建辉,柴博,刘娇.特种陶瓷液压机系统模糊 PID 控制的仿真[J].测控技术,2017,36(08):90-93.
[85] 唐维军.液压定向夹持机械臂及其液压系统分析[J].液压与气动,2012(11):10-12.
[86] 陈洪,曹江洪,王建林,等.一种更换球磨机衬板的装置:201120346971.3[P].2011-09-16.
[87] 杨丽新. 重载夹持装置动态夹持力分析及夹持驱动策略研究[D].中南大学,2011.
[88] 张莉. 重载冗余机械臂运动学力学分析及路径规划[D].哈尔滨工业大学,2014.