24Сʱ���Ķ�������
24Сʱ���Ķ�������
ժҪ
������Բ��Ƭ�����ǹ辧Բ�ӹ��������������֮һ��������Բ��Ƭ��Ҫͨ����̨������Ϲ����˹������Ͻ����������Զ���ˮƽ�ϵͣ�Խ��Խ�������㵱����ҵ���������ĶԹ辧ԲƬ�������ڵ�ǰ��Բ��Ƭ��������״�������������Բ��Ƭ�������Զ���ˮƽΪ��ҪĿ�ģ������������о������� .
������1����Ե�ǰ��Բ��Ƭ�����Զ���ˮƽ�ϵ͵����⣬�����о���֤�������--��ȫ�µ���Բ��Ƭ������ʽ����ԭ�е���Բ��Ƭ�������Զ������죬����������Բ��Ƭ��Ԫ�����ɻ��飬���Ϊ����Ƶ��Զ������ϻ�е��ϵͳ�γ���ȫ�Զ���Ƭ������ȫ��������ʽ��
������2����ȷ��������е��ϵͳ��Ҫ��ɵĹ��������ݻ�е��ϵͳ�Ĺ���Ҫ��ȷ����е�ֵ�������ʽ�����Ի�е�ָ���Ĵ���������������ƣ�����ȷ���ĸ��ᴫ���������������е�ṹ��ƣ����ս������ɵĸ���ṹ�������ϣ��Ӷ������������е��ϵͳ�ṹ��
������3����PLCΪ���ƺ��Ľ����˻�е��ϵͳ�Ŀ��Ƴ������ƣ�����VS2017����������MFC��������λ���������ı�д��ͨ�������ĵ�����Ľ�������ʵ���˻�е��ϵͳ���Զ����ơ�
������������Ƶ�ȫ����Բ��Ƭ������ʽ�Լ������ɵ��Զ������ϻ�е��ϵͳ�ܹ���������Բ��Ƭ�������Զ���ˮƽ���о��ɹ����кܺõ�ʵ��Ӧ��ǰ����
�����ؼ��ʣ���Բ��Ƭ���Զ������ϣ���е�֣��ṹ��ƣ��Զ�����

Abstract
����Inner circle slicing technology is one of the mainstream technologies in the field of silicon wafer processing. Domestic inner circular slices are produced mainly by single machine cooperating with workers' manual feeding and unloading, it's low level of automation is increasingly unable to meet the rapidly growing demand for silicon wafers in today's industry. Based on the current situation of the production of inner circle slices, the research was carried out as follows aims at improving the automation level of the production of inner circle slices.
������1�� In view of the low level of automation in the production of inner circle slices, a new production mode of inner circle slices was designed: The automation transformation was carried out on the original inner circle slicing machine. then the reformed inner circle slicing unit was connected into a assembling unit to produce cooperate with the automatic feeding and unloading manipulator system designed for it.
������2�� The work of the whole manipulator system was clearly defined, the coordinate form of the manipulator was determined according to the functional requirements of the manipulator system, and the transmission schemes of the axes of the manipulator were designed. The mechanical structures of the axes were designed according to the determined transmission schemes. Finally, the overall structure design of the whole manipulator system was completed by Integrate the structure of each axis.
������3�� The control program of the manipulator system was designed with PLC as the control core, and the upper computer interface program is compiled with MFC under VS2015 environment. Through subsequent debugging and improvement, the automatic control of the manipulator system was finally realized. The new production form of inner circle slice and the designed automatic feeding and unloading manipulator system can greatly improve the automation level of inner circle slice production, and the research results have good practical application prospects.
����Keywords: Inner circular slice; Automatic feeding and unloading; Manipulator ;Structural design; Automatic control
Ŀ¼
������1������
����1.1���������
�����辧ԲƬ��ռ������IC������ϣ�Լռ����ɱ�������֮һ���ң�Ŀǰ90%���ϵ�оƬ�ʹ������ǻ��ڰ뵼�嵥����Ƭ�Ƴɣ�������ȫ��뵼���Ƭ���ǹ���Ӧ��ľ��棬����Gartner��Ԥ�⣬��Ƭ�г���ģ����2020��ﵽ110����Ԫ21.
�����辧ԲƬ�ӹ�����ʹ�õļ�������Բ��Ƭ������������Բ��Ƭ���Բ����и�����е��ڵİڶ������Կ��ơ������üӺ���ķ������ӵ�Ƭ�ն�ʱ���и��ͻ��úܿ�����ͻἫ����˷ѱ��в��ϣ������и������ϲ�辧ԲƬ�ĺ��Ҳ�Ƚϴ������Բ��Ƭ��������ͱ���Բ��Ƭ������ȡ������Բ��Ƭ�����������£����������Բ�п���������ת�˶����辧Բ������Բ�пھ����˶����н������Դ�ʵ�ֶԹ辧Բ����Ƭ�ӹ�����Բ��Ƭ������ʹ�õ���Բ��Ƭ�ȶ��Ժã�ͨ���Ž��ܹ�ʹ�ܱ��ĵ�Ƭ��ýϸߵĸ��ԣ������������ĥ���߾���Ƭ����һ�����ǰ뵼������и�����ؼ���Ӧ����Ϊ�㷺�ļ���������Բ��Ƭ������ȣ���Բ��Ƭ���������и����С���и�ȸߡ����и�ӹ��������ı��ʲ��١��и��ٶȿ졢����Ч�ʸߵ��ص������ȡ������Բ��Ƭ�������ڰ뵼������и��豸������ռ������Ҫ�ĵ�λ��
��������������Բ��Ƭ����Ҫ��ͨ����̨��������˹������Ͻ�����Ƭ�������������̲��������Ͷ�ǿ�Ƚϴ����˷��˴����˹��ɱ��������������Զ���ˮƽ�ϵ͡���ҵ���ѧ������������Ľ���ʹ�õ���ҵ�������Զ���ˮƽԽ��Խ�ߣ�����ȡ���˹�ʵ��ȫ��Ṥҵ������ȫ�Զ���Ҳ��Ϊ�˵�ǰ�ı�Ȼ����I6,��ˣ����������Բ��Ƭ����ģʽ���Զ���ˮƽ������Ч��Ҳ��Ϊ�˱�Ȼ��ѡ��
�����Զ�������һֱ���Զ�������������о��ȵ㡣�ںܶ�������ʽ�У���Ҫ���豸���������Ե����Ϻ����ϣ������ؼӹ������Լ�ʹ�ò��߽��д����������Ĺ�����������������ʽ���������˹������ϵķ�ʽ�����˵��Ͷ�ǿ�Ƚ���ܴ����������������൱�Ļ�е�������������豸���������Ĺ�������Ҫ���˽������ϲ���ʱ��Σ���Խ���ܸߡ�����Щ������ʽ�в����˹����������ϵı�ʮ��ͻ�����������Щ�����������û�е���Զ������������������������Ϊ���ʡ���������������ǰ��Ͷ��IJ����Լ������ȷ�������ƣ�ʹ�ù��ڹ����и��豸���������ϵĹ����������Ȼ���˹���ɣ���˺ܶ���ҵ�����������д���������Ч�ʵ͡����ȵ͡����˵��Ͷ�ǿ�ȴ������з�����ȫ�¹ʵ����ݵ�- - ϵ������718.
�������˹���������ȣ����û�е�������Ͼ�������ͻ�����ŵ㣺
������1���Զ������ϻ�е��װ�ö����������˶�����С��ͨ����ǿ�����ȸߣ����Գ�ʱ��������ҵ011,��2�����û�е��ϵͳ���������ϲ�������������ʹ��ҵ�������Զ���ˮƽ�����ߣ�ͬʱҲ�ܹ��������Ч�ʣ��ڼ����˹����Ͷ�ǿ�ȵ�ͬʱΪ��ҵ��ʡ�˴����˹��ɱ���
������е��ϵͳ�����Ϲ���ͳ-�淶�� �ܹ���֤��Ʒ��-���ԣ���֤�˲��������ȶ���ͬʱ�������ҵ����������1.
������3�����˹���������ȣ���е���Զ������ϸ��ܹ���Ӧ���ӵĹ����������������ȴ����������һЩ�ӹ������У���ʱ�乤��������ʹ��������ƣ������������Ӱ�칤�˵����彡��������Щ������ʹ�ò�֪ƣ�͡�����Σ�յĻ�е�ֽ��������ϲ����ܹ��ܺõؽ����Щ���⡣
���������ϵķ����п��Կ������û�е�ֽ����Զ��������ŵ�ͻ����������ȡ���˹�������Ҳ��һ�ֱ�Ȼ�����ơ�
�������������ԭ����Բ��Ƭ���������Բ��Ƭ������ϻ�е��ϵͳȫ�Զ������ĸ������Ƚ���������ʵ�����������ȫ�Զ���ȷ���ƣ���Ƴ�һ���Զ���ˮƽ���ߣ������������ָ�Ϊ�������������������ȫ�Զ���Բ��Ƭ�������顣��ԭ����Բ��Ƭ����ȣ���ȫ�Զ���Բ��Ƭ����������е��ŵ���ҪΪ��
�������˹�������Ϊ��е���Զ������ϣ��Զ���ˮƽ�����ߣ�����ؼ�������Բ��Ƭ�������̵��˹��ɱ����������̸�Ϊ��ȫ������Ч�ʸ��ߣ��������ָ�Ϊ������
����������Ʒ�����ȫΪԭ������ƣ�����Բ��Ƭ�ӹ�������-һ�����¡�����ƶ��ڸ�����Բ��Ƭ�����ӹ����Զ����̶ȡ��������Ч�ʡ����ٹ����Ͷ�ǿ�ȵȷ��涼���ż�Ϊ��Ҫ�����塣
����1.2��Բ��Ƭ���Ĺ� �����о���״
����������Ƭ������������������ʮ���ĩ������ʮ������ڣ�����Ƭ���ļӹ�����ֱ�����ﵽ��125mm��5 Ӣ�磩���ϣ���ʿ����������Ү��˾��������ʽ��Բ��Ƭ���ӹ���Բֱ�����ɴ�304.8mm��12 Ӣ�磩���ڰ�ʮ����к�����Բ��Ƭ���������Ʒ����
����1998��1�£��ձ����ս��ʯ��ҵ��˾�Ƴ�T-SM-300��Բ��Ƭ������־����Բ�и��Ȩ����һ���µ�̨�ף���������90���ĩ��ʼ��������Բ��Ƭ�����ķ�չͣ����ʮ����14.
����ֱ�����ڣ�ȫ��Ƚ�������������Բ��Ƭ���ij��Ұ������ձ�Tokyo Semitsu ��ʽ���磬���������ΪTSKϵ�л�����ʿ��Meyer-BurgerAG��˾�����������ΪTSϵ�л����ձ�Disco��ʽ���磬���������ΪDVDϵ�л����¹�GN��˾�����������ΪIDSϵ�л�������STC ��˾�����������ΪSTCϵ�л�������Kayex��˾�����������ΪDSϵ�л�����Щ��������ŷ��TSϵ��Ϊ�������Զ��ǵ�TSKϵ��Ϊ�����γ���������Ƭ���������������ݡ��ӽṹ��ʽ����Բ��Ƭ����Ҫ��Ϊ��ʽ����ʽ������ʽ��������ʽ��Բ��Ƭ����Ҫ����������ʿ��������Ӣ�������������º��ձ�����������Բ��Ƭ����ҪΪ��ʽ�ṹ����ʽ��Բ��Ƭ���ĵ������ϰ�װ��ʽΪˮƽ��װ����Ƭ����ת�˶���������ֱƽ���ڡ���ʽ��Բ��Ƭ���İ�����Ϊ��ֱ��װ����Ƭ��ˮƽƽ������תʵ�������иĿǰȫ����Բ��Ƭ�����г��ݶ�ֶ�����ʽ�ṹ�Ļ�����ռ�ݡ�������Բ��Ƭ�������г��ֲ������������Ĺ�˾�����������䱾���г�����ʿ����Ƭ����Զ��������ء�Ӣ����˾�IJ�Ʒ�����������г�ת��ŷ�ޣ�����������������Բ��Ƭ��ռ�����ձ����г���ȫ��ʣ���г�������������ʿ��˾��֧��159.
������������1964��ʱ���Ѿ���ʼ����Բ��Ƭ�����������������Ϻ���ר�������������������������ң������������ʼ�����ձ��������ܹ�˾��������Ƭ��Ϊԭ�ͽ��з��Ʋ��������Լ��Ļ��͡���ʱ��Բ��Ƭ�����Ѿ�ȫ��ʵ���˹�����������������ˮƽ�Ա��ձ����������Ļ��ͺ���ѷɫ������������ʷԭ�˺��ʮ��ʱ�������Բ��Ƭ��������ˮƽͣ�Ͳ�ǰ������ʱ�ڹ����Ѿ��������˼ӹ���Բֱ����4��ij����豸����������⼼��ˮƽ�IJ�౻��������
��������ʮ���ĩ����ʮ������ڣ��뵼��ר���豸�����г�ƣ��������--ʱ�ڹ��������˴����Ĺ����Ƚ���Ƭ�����豸�������������Ƚ��豸ʱȱ���Ա���רҵ�豸����ҵ���б�����ʹ������Բ��Ƭ��������ˮƽ���»������Ա��ڹ��������2~3���������ڡ�
������ʱ���������賧'���������������Ƚ���Բ��Ƭ����Ϊ��Ҫ����װ����һԾ��Ϊ�������Ƚ����ܹ�����������ҡ�
�����˺�һֱ�������ͳ���ļ��꣬����רע��������Բ��Ƭ������Ȼ������Ϣ��ҵ�����ӵ���ʮ���о����Լ������ĸ��˳��ҡ���Ȼ��- -ʱ�ڹ�����������Բ��Ƭ�����ܼӹ��Ĺ辧Բ��Ƭ��ֱ����Χ�����˴�φ50��0200mm,�����似��ˮƽ���൱�ڹ����ʮ������ڵ�ˮƽ���˺���ڳ����˼ӹ�Ч�ʸ��ߵĶλ��Բ��Ƭ��1].��ʵ����ͼ1��ʾ��
����1.3��е��ϵͳ�������о���״
������е�ֵķ�չʼ��������50�����ֱ�������Ѿ���Ϊһ-�ֹ�Ϊ��֪�ĿƼ������ϸߵ��Զ�������е����е�ֱ�ͨ�����ؽ�֮�������ģ�����ֱ۵��˶����ܣ���ͨ���˶����Ƴ����е��˶�������������ץȡ�������Լ��Թ��ߵIJ�������е�ֵij��ּ���شٽ��˹�ҵ�����Զ����ͻ�е��ˮƽ����ߣ������˴��ظ������ص��Ͷ��н���˳������������Զ����о������е�һ����̱�171�������е��װ�ñ��㷺Ӧ���ڹ�ҵ�Զ��������ĸ��������У��������Ƕ����о��IJ������룬��е������Դ����ߣ��Ա��˹������������е���ѭ���ظ���������֪ƣ�롢���ӹ��������в���Σ�գ��ȶ��Ըߡ�ץ���غ����������ִ�������Ӧ�÷�Χ���һϵ���ص㣬 ʹ���ڸ��и�ҵ�����еĹ�ע��Խ��Խ�ߣ�Ӧ��ҲԽ��Խ�㷺191.
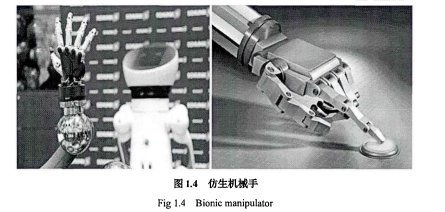
������е�������Ǵ�������ʼ���Ƶģ���-̨��е����1958 �굮�����������Ͽ��ƹ�˾����ṹ��Ϊ������ṹ�����������Լ���װ�ڻ����ϵ�һ����ת���ۣ��ֲ�ץȡ����ͨ����װ�ڳ��۶����ĵ�ſ�ʵ�ֶԹ�����ץȡ��������ʾ���͵Ŀ���ϵͳ���п��ơ�1962�꣬�ڵ�- -̨��е�ַ����Ļ����ϣ��������Ͽ��ƹ�˾���������ΪUnimate���������Զ�����е�ֵ����ƣ����������ʾ�������Ϳ���ϵͳ���п��ơ�������е�ֵ��˶�ϵͳ������̹����������Һѹ������е�ֱ۵������������Լ���ת���������ôŹ���Ϊ��������ϵͳ�Ĵ洢װ�ã��˿��е���Ǻ����������е�ֵķ�չ������ͬ�꣬��һ����ΪVewrsatran�Ļ�е��Ҳ��������е���칫˾���Ƴɹ����ÿ��е�ֵ�������������ʵ�������Լ���ת�˶�����ͬ������ʾ�������Ϳ���ϵͳ���п��ơ��˺�ȫ���е�ֵķ�չ���Դ������е����Ϊ������1962 �꣬����AMF��˾������������ȫ������Ϊ"������"�����ˣ��ǹ�ҵ��������������ԭ�ͻ�����֮һ121.1965�꣬ȫ����̨�ܹ�ͨ�������Ӿ�����ʶ���������ܹ�ʵ��λ�ñ�ʶ�Ļ�������������ʡ����ѧԺ���Ƴɹ�21.1978�꣬ - -����ΪUnimate-Vicarm���ܽ�װ����ҵ�������͵�+1���Ĺ�ҵ��е�ֱ�������ʡ����ѧԺ��˹̹����ѧ�Լ�Unimate ��˾�������Ƴɹ��������ϵͳ��һ̨С�͵��Ӽ������ͬһʱ�ڣ��¹�KuKa��˾���Ƴɹ���һ�ֲ��ùؽ�ʽ�ṹ���п��Ƶĵ㺸��е�֡�80��������ݴ�ѧ�����������ؽ�����������������˶�����Ϊԭ�����Ƴ���һ�������Ȼ����ˣ����Ȳ��ṹ���ý����͵��ɽ������ӣ��û����˿��������·���Ͽ������С��ڴ˻����ϣ���������ͨ����ͬ��˼·���Ƴɹ��˾߱����ֲ��ֹ��ܵĻ�е�֣������ô�������ģ�����ֵĴ�����֪���ܡ������������о��ɹ�Ϊ��е���Լ�������ѧ����о������ṩ��һ���µ�˼·������شٽ����ִ���ҵ��е��ϵͳ�ķ�չ��2005 �꣬�ձ��Ķ�����ѧ������Ա���Ƴ���һ���������ļ��֣���������5����ָ��ɣ�ÿһ����ָӵ��3���ؽڣ�ָ��ؽ�ͨ����������ʽ�˶������ؽ�ͨ���������2.2007�꣬Ӣ��David Gow���Ƴ���- -����Ϊi-Limb�������ٴ��ָ��ķ�����е��2����������е�ֵ��о��ǻ�е�ַ�չ�Ĵ����ơ�ͼ1.4Ϊ������е�ֵĽṹ��
�����ҹ���20����70�����ʼ���й�ҵ��е�ֵ����ơ�1972�꣬�Ϻ���ʼ�з����˵�һ̨��е�֣����ȫ�����ʡ��Ҳ��̿�ʼ�˻�е�ֵ��з�������ƻ��ڼ䣬�ҹ���ʼ���ӶԻ�е�ֵ��о���Ӧ�ã���Ͷ���˴����ʽ��ڴ��ڼ��о����ӹ��������һϵ�еĹ���ҵ��е�֣��籱����е�Զ����о����ɹ���������Ϳ�����˲��ɹ�Ӧ������Ϳ��ҵ��
�������ݻ����о����뱱�������о����������Ƴɹ��˵㺸�ͻ����ˣ����������о�����������з�����벻��������ˡ���һʱ�ڻ����˵Ŀ���ϵͳ�����϶����ɱ����Ƽ���ѧ�������о������й���ѧԺ�����Զ����о������Ͻ��п����ġ����ͬʱ��������ϵͳ����ʹ�õ�һ-ϵ�еĹؼ�������ֱ���ŷ������ר����У���������������ֵ�Ҳ�������˳���124.
�����ҹ���Ҫ�о������ֶ������������е�ֵ�Ӧ�÷�Χ�ϣ����з�ר�û�е�ֵ�ͬʱ��Ҳ���Ͻ���ͨ�û�е�ֵ����ƣ�����ȡ����- -Щ�еijɹ����ɹ����Ƴ��˰�����������ƻ�е�֡�ʾ�������ͻ�е�֡������ʽ��е�����ڵĶ������ͻ�е�֡��ҹ��Ŀ�����Ա�ڻ�е�ֵ����ƹ�����Ҳ�����ܽᣬ����е�ָ���Ҫ���͵��˶�������Ƴ�Ϊͨ�û������Ӷ��ܹ����ݲ�ͬ�Ĺ�������ѡ�ò�ͬ���ܵĻ�����װ����������蹤��Ҫ���ר�û�е�֣�ʹ��е�ֵĸ���Ҫ�㲿��ʵ����ͨ�ã��ȷ�����������죬��ʹ�豸��ά����ü�
����������Щ���ڻ�е�ַ�����з�Ͷ�룬�ҹ��ڻ�е�ֵ�Ӧ�ù��̷����Ѿ��߱���һ���Ŀ�����������������������-֧�˽���������ܹ�����ʵ�ʹ��������з����۸����������������ƹ�˾�����Ļ�е�־����Ļ�е�ֵ��з�����25].
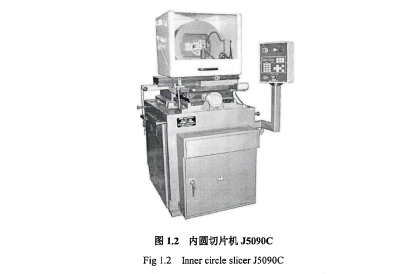
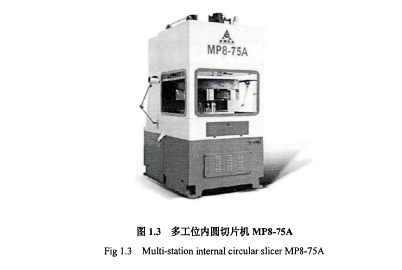
������ͼΪ��ҵ�����г����ļ��ֻ�е���豸��

�������⣬���Ź�ҵ�Զ����ķ�չ�����ʲ��ϱ�Խ��Խ���Ӧ���ڸ��ָ��ӻ�еϵͳ�IJ������ϣ�����ϱ��������ʾ����˲������ν����ϵͳ���������Ӱ�졣�ڴ˱����£�������һ�����͵Ļ�е��-���Ի�е�֡����Ի�е���봫ͳ�ĸ����ƶ���е����ȣ����и��������ȸߡ��ܺĵ͡������ɱ��͵��ŵ㡣���Ի�е�ֵ���Ƽ��о��Ѿ���Ϊ�˹������е���о�������ȵ�2612].
����1.4���������
��������Ϊֹ��������Բ��Ƭ��������ʽ- - ֱ���Ե�̨��������˹������Ͻ��������������Զ���ˮƽ�ϵͣ������Ͷ�ǿ�Ƚϴ������������̴���һ-���İ�ȫ�������������з���һ��ȫ�µ���Բ��Ƭ������ʽ�������ȶ�ԭ��С����Բ��Ƭ�������Զ������죬������������Բ��Ƭ�������ɻ��飬����Զ������ϵ�����������Ϊ��������Ƶ��Զ������ϻ�е��ϵͳ�����Բ��Ƭ��ȫ�Զ����������ı���ԭ����Բ��Ƭ���������л�е��������һ���һ-�� ��Σ���Ե��˹�������������ʽ�ıˣ�������������Բ��Ƭ���Զ���ˮƽ��������Բ��Ƭ��������ģʽ��ӱ�����岼�ֺ���������ԭ���Ƚ������кܺõ�Ӧ��ǰ����
����1.5������о����ݼ����� ����ṹ
�������ĵ���Ҫ�о����ݺ���������ṹ���£�
������1�£��Կ�����о������������������ϸ���ܣ�����������Բ��Ƭ�����Լ�����
����е��ϵͳ�Ĺ����ⷢչ��״����������Բ��Ƭ�����ķ�չ���ƣ�ͻ���˱��о�������ǰ�������塣
������2�£���������Բ��Ƭ������ͻ��ȱ��Ϊ���ݣ�����Բ��Ƭ�����Զ������췽����
�����Լ�������Բ��Ƭ����IJ��÷�����������ƣ����������Զ�����������е��ص���첿�֡�
������3�£�����˻�е������ṹ��ʽѡ���Լ����ᴫ��������ƣ�Ȼ��Ը��ᴫ�������������ϲ��������ṹ��ƣ��������е�ֽṹ����������˶���λ������������ʽ�����˷��������Ի�е��ϵͳ�еĹؼ��㲿��������ѡ�ͼ��㡣
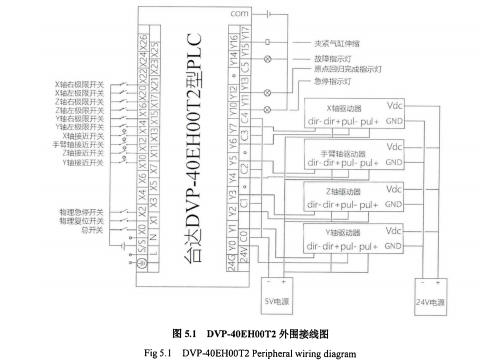
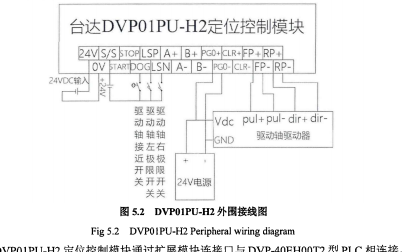
������4�£�����˻�е��ϵͳ����ϵͳ����ƣ���������ϵͳӲ��ѡ���������֡����Ƴ����ģ�鹦����Ƽ�ʵ�֣��Լ���λ�����������Ƶ����ݡ�
������5������˻�е�ֿ���ϵͳ��Ӳ��ϵͳ�Ĵ������ɿ���ϵͳ������λ��ͨѶ��ͬʱ�Կ��Ƴ���Ĺ���ʵ�ֽ����˵��ԡ�
������6�£��ܽ������о��������Ĺ����ɹ������Ժ������������ƽ�����չ����
������2����Բ��Ƭ���Զ������켰�������巽�����
����2.1ȫ����Բ��Ƭ���鷽����֤
����2.1.1���������Բ��Ƭ����ȱ��Ľ��������.
����2.1.2�»��鷽���о����
����2.2�»����ϵͳ��ɼ����ܷ������о�
����2.3��Ҫ�ṹ���Զ��������о�
����2.3.1��Ƭ��������Ԫ��������о�
����2.3.2����ϵͳ���췽���о�
����2.4������
������3�������ϻ�е��ϵͳ���
����3.1�����ϻ�е�����巽�����
����3.1.1�����ϻ�е�ֹ�������
����3.1.2�����ϻ�е��ϵͳ����Ҫ��
����3.1.3��Բ��Ƭ������ɼ��豸����
����3.2.�����ϻ�е�ַ������
����3.2.1��е��ϵͳ����ṹ��Ʒ�����
����3.2.3��е�ָ��ᴫ���������
����3.3.�����ϻ�е����Ҫ�ṹ���
����3.3.1��ת��ṹ���
����3.3.2ˮƽ��Y�����
����3.33��ֱ��ṹ���
����3.3.4�ƶ���ṹ���
����3.3.5������ṹ���
����3.3.6���ϼܼ��ϲֽṹ���
����3.3.7��е��צ�ṹ���
����3.3.8��е��ϵͳ����ṹ
����3.4��Ҫ�ṹ�α�Ի�е��ϵͳ�˶����ȵ�Ӱ�����
����3.4.1֧�ܶ����α����
����3.4.2���ؼ��α����
����3.4.3�ϲ�֧���α����
����3.4.4���α�����Ķ�λ�˶����������ʽ����
����3.5.�����ϻ�е�ֹؼ��㲿�����㣬
����3.5.1��е�ָ���ؼ�����ȷ��
����3.5.2�н�����ѡ��
����3.5.3����˿��ѡ��
����3.6�����Y
������4�»�е�ֿ���ϵͳ���
����4.1��е�ֿ���ϵͳ�������
����4.2��е�ֿ���ϵͳӲ�����
����4.2.1��е��ϵͳ���������÷���
����4.2.2���������ܼ�ѡ��
����4.2.3����������ܼ�ѡ��
����4.3��е��ϵͳPLC���Ƴ������
����43.1PLC���Ƴ���M��
����4.3.2��ʼ���������
����4.3.3�˶�ģʽѡ��������
����4.3.4ԭ��ع�������
����4.3.5�ֶ����Ƴ������
����4.3.6�Զ����Ƴ������
����4.4����ϵͳ��λ�����濪��
����4.4.1�����������ṹ���
����4.4.2��������ģ�鹦��ʵ��
����4.5������
������5�¿���ϵͳ�������
����5.1����ϵͳ�轨
����5.1.1��ϵͳ����
����5.1.2���ƹ����
����5.2ϵͳ��
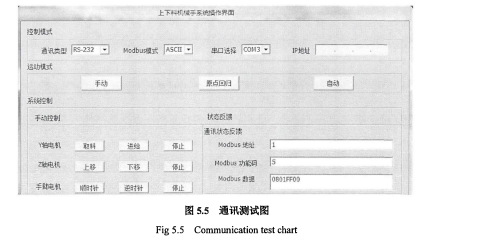
����5.2.1ͨѶ����
����5.2.2������ʵ�ֵ���
��6���ܽ���չ��
����6.1�о��ܽ�
������Բ��Ƭ���ǰ뵼��ӹ���ҵ�Ĺؼ��豸���ڹ辧Բ�ӹ�����ռ������Ҫ��λ�����ڵ���Բ��Ƭ��Ҫ�Ե�̨��������˹������Ͻ����������Զ���ˮƽ�ϵͣ���IC��ҵ���ٷ�չ���Թ辧ԲƬ����Խ��Խ��Ľ��죬����������ʽԽ��Խ�����������Թ�ƷԲƬ�����������-��ҵ��״����������Բ��Ƭ������ͻ��ȱ��Ϊ�����㣬�Թ������ڹ㷺ʹ�õ�С����Բ��Ƭ���������Զ������죬������������Բ��Ƭ��Ԫ�����ɻ��飬Ϊ��������������Զ������ϻ�е��ϵͳ��ʵ���˻�е��ϵͳ���Զ����ƣ������ɵ���Բ��Ƭ���鼰���Զ������ϻ�е��������������ռ�����������Բ��Ƭ�������Զ���ˮƽ�����������õ�Ӧ��ǰ����
�������ĵ���Ҫ�о��ɹ��ܽ����£�
������1�����������Բ��Ƭ������ʽ�Զ���ˮƽ�ϵ͵�ȱ�㣬�����е���Բ��Ƭ���������Զ������죬�����һ��ȫ�µ���Բ��Ƭ������ʽ��������������Բ��Ƭ�������ɻ��飬Ȼ�����Ϊ����Ƶ��Զ������ϻ�е��ϵͳ����ȫ�Զ�����Բ��Ƭ���������գ�ȷ������Բ��Ƭ�������岼�÷�����������Ƭ������ʽ��ϵͳ��ɣ���ȷ�˸�����еϵͳ����Ҫ��ɵĹ�����
������2������ȷ�˻�е��ϵͳ��Ҫʵ�ֵ���Ҫ���ܵĻ����ϣ����ݹ�������ȷ���˻�е��ϵͳ�Ľṹ��ʽ�ͽṹ��ɣ�����˻�е��ϵͳ���ᴫ���������о�����ƣ�������Ƶĸ��ᴫ�����������˸��ᴫ���Ľṹʵ�֣�ͬʱ�ڶ��ϲֵ������Ϸ�ʽ��ƵĻ�������������ϲֲ��ֽṹ����ƣ����ս������ɵĸ��ᴫ���ṹ�Լ��ϲֽṹ�������ϣ���������������ϻ�е��ϵͳ�Ľṹ��ƣ��������е�ֽṹ����������˶���λ������������ʽ�����˷��������Ի�е��ϵͳ����Ҫ�㲿��������ѡ����У�˼��㡣
������3������������е��ϵͳ��Ҫ��ɵĹ��ܶ�����ϵͳ���˶���ʽ�����˾��������滮�����ݹ滮�õ��˶��������������ϵͳ�����˶�ģʽ�¿��Ƴ���ı�д��ͬʱ���ݿ��Ƴ���ľ��幦������˻�е�ֿ���ϵͳ��λ���������ı�д��������λ�������и�����ģ��Ĺ��ܽ�����ʵ�֡�
������4������ȷ�˿���ϵͳӲ����ɵĻ������������������ϵͳ�Ĵ��ʵ������λ����PLC��ͨѶ��ͨ�������ĵ������˿��Ƴ����Լ��������IJ��㣬����ʵ���˻�е��ϵͳ���Զ����ƣ�Ϊ����ʵ�������п���ϵͳ��ʵ�ֺ͵����ṩ�����ۻ�����
����6.2չ��
���������о������һ���Զ������ϻ�е�������Բ��Ƭ��Ԫ��ȫ����Բ��Ƭ������ʽ��������˻�е��ϵͳ������ṹ��ƣ�ʵ���˻�е��ϵͳ���Զ����ƣ�������������Բ��Ƭ�������Զ���ˮƽ���������ˮƽ��ʱ��ľ��ޣ������о�����-Щ����֮������Ҫ�������в�������ƣ�
����1��������е��ϵͳ���������ṹ����Լ��㲿���Ľṹ��ƣ�����SolidWorks�н�����̓��װ�䣬�����������������ļӹ�����ԣ�����֤ϵͳʵ��Ӧ�ù����е�Э���ԺͿɿ��ԡ�
����2.��ʵ�����ж���������ϵͳ�����˵��ԣ����Կ��Ƴ������λ������IJ���֮���������ģ���������ϵͳ��������Ҫ�����ֳ��������ԣ�����֤��������ϵͳ��ʵ�ʹ����е��ȶ��ԡ������ֳ�����ʱ��������������Ƴ����ʵ���������������н�һ�����ĺ����ơ�
���������
����[1]��ƽ��ȫ��� ��ԲƬ�IJ�ҵ״������[J].���ɵ�·Ӧ�á�2017,��3���� 15-24.
����2] �γ�����Ӣ�������ΰ����Ψ�ӣ�siC��Ƭ�ӹ�������״������[].���ӹ�ҵר���豸��2016,��6���� 1-6, 54.
����[3] ����������Ƭ��Բ��Ƭ�����о�[D]. �Ϻ�������������ѧ˶ʿѧλ���ģ�2010.
����[4] W.I.Clark,AJ.Shih,C. W.Hardin,et al.Fixed abrasive diamond wire machining-partI:process monitoring and wire tension force[J].International Jourmal of MachineTools&Manufacture,2003,43:523-532.
����[5] �컪������ϣ�ܣ���Т��������ֱ��徵�����Զ���������������ϵͳ�Ŀ������[].��е��������죬201311���� 204-206.
����[6] Qinxia Dong, Renhe Ma. et al.Thinking and Practice of Building Itelligent Factoryand Realizing Machine Replacing People[]. Kitting Industries.2015,��No.2���� 42-45.
����[7] Ф�������ڣ���溡�����PLC���Զ����ϻ�е��[J].������������죬2011,��2���� 152~ 154.
����[8]���䴫�� �����ϻ�е�ֵ���ơ��켣�滮������о�[D].���գ����մ�ѧ˶ʿѧλ���ģ�2012
����[9] Dianyong Yu. Application of manipulator based on PLC and touch screencontrol[J]. Manufacturing Automation, 2009, 31��2���� 121~123.
����[10]��ѧ���ڹ��ԡ���������˲�ҵ��չ�ص����0.�����˼�����Ӧ�ã�2002,��3���� 8~9.
����[11] Jic Wan.Review of Knting Dyeing Machines on the 2016 China Intermational TextileMachinery Exhibition-ITMA Asia[J]. Knitting Industries.2016,��No.12���� 32-39.
����[12]������ ���˻�е���˶����Ƶ��о�[D].ɽ����̫ԭ�Ƽ���ѧ˶ʿѧλ���ģ� 2012.
����[13]��ս�У��ſ��������ޣ���ِ����������Զ������ϻ�е���˶�ѧ����������[].��е��������죬2012, ��5���� 244~246.
����[14]����Ĺ�Ƭ�и�����豸[��]����2008,0��19����46-47.
����[15] Y.Shiraishi, K. Takano, J. Matsubara. Growth of silicon crystal with a diameter of400mm and weight of 400kg []. Jourmnal ofCrystal Growth, 2001, 229: 17~21.
����[16]���������ҹ��и��豸����״��չ��[J].���ӹ�ҵר���豸202����11-13.
����[17]Ф�Ϸ塣���ܻ�����[M].���ݣ�����������ѧ�����磬2008.
����[18]�ڵ��£������塣����PLC�Ĺ�ҵ��е�ֿ����������̬���[J].����ҵ�Զ�����2011,33��18���� 86~89.
����[19] Design and Development In-Pipe Sewer Robot Based on Fuzzy LogicControl[J]Mechanical Engineering and Technology.2014: 18-25.
����[20] Chao Yu, Minghe Jin, Hong LiuAn. Analytical solution for inverse kinematic of7-DOF redundant manipulators with offset-wrist[J]. IEEE, 2012, 8��5���� 92~97.
����[21] TORGNY B . Present and future robot control development--An industrialperspective[J]. Annual Reviews in Control, 2007, 31: 69~79.
����[22] BERGAMASCO M,SCATTAREGGIA S M. The Mechanical Design of theMARCUS Prosthetic hand []. IEEE International Workshop on Robot and HumanCommunication [Z].0~ 7803~2904 ~x/95,1995: 356~372.
����[23] ISHIKAWA Y, YU W,YOKOI H, et al. Development of Robot Hands with anAdjustable Power Transmitting Mechanism [D]. Itelligent Engineering SystemsThrough Neural Networks, 2000�� 18����71~72.
����[24]�����ҵ��е���������е�Ӧ��[J].�й��Ƽ��ݺᣬ2010.��18��33[25]����Ԫ����Լǿ�����ˣ�����е�֣���չ��ǰ����Ӧ��[D.�й�ʳƷ��ҵ208,��10����47-48
����[26] WenChenDynamic modelingof multi- -linkflexible roboticmanipulators[J]. Computers and Stmemres, 2001��9���� 183~ 195. .
����[27] Subudhi B, MorrisA S. Dynamic modeling, simulation and control of a manipulatorwith flexible link and joins[]. Robotics and Aumnomous Systems, 2002. 41: 257~270.
����[28]��С������־��ȫ�Զ���Բ��Ƭ���������ϻ�е��ϵͳ����[]��ϻ������Զ����ӹ�������2019 ��01���� 94-96+100.
����[29]�쿥�ƶ������˲�����е����������[D].�Ͼ����Ͼ�������ѧ��2006[30]�����ף������������˶���ѧ����ָ�꼰���Ż�[].��е����ѧ����1989,25��2����9-14.
����[31]ʯ־�£�����壬�º������ȡ������˻�����ȫ������ָ���о�[]������205,27������420-422.
����[32]���磬��ѹ�������ϻ�е�ֵĿ������о�[D].���ݣ�����������ѧ��2015.
����[33]�η���ŷ���ơ�����Բ�����귽ʽ��С�ͻ�е�ֵ�PLC ����ϵͳ[J]����һ�廯��2003,9��1����47-49.
����[34] Yeh S S, Hsu P L. Analysis and design of integrated control for multi-axis motionsystems[J]. Control Systems Technology, IEEE Transactions on, 2003, 11��3���� 375-382.
����[3]���¡�����������ŷ�����ıȽ�[].��С��ҵ�����뼼���� 2010��34���� 311-312.
����[36] Renaud M. Geometric and kinematic models of a robot manipulator: calculation of theJacobian matrix and its inverse[C/Int. Symp, Industrial Robots, 1981: 453-465.
����[37]��־�����ۡ�����LabVIEW�����ͽ��ɰ���и��豸���з�[J].��е���������2018,��5���� 194-196.
����[38]��Ρ�������㣬�ӹ����Ľ��������ŷ������ѡ�������[].���缼����2017.��4����48-50,53.
����[39]�ξ�˧��ӡˢ��·��ץȡ��е�ֵ�������о�[PD].�� �����ൺ��ѧ��2018.
����[40] Bugaighis, Tarek. Guidelines for Ball Screw Sclection []Mcdical DesignTechnology.2007.
����[41]�����IJ�����ѧ[M].�ߵȽ��������硣2011, 290-303.
����[42]���࣬��Ƽ�����ľꡣ����PLC�������е�ֿ���ϵͳ�������ʵ��[].����ҵ�Զ�����2016��07���� 21-24.
����[43]�����ף���ٻ�����塣����PLC�Ĺܼ��Զ�����ϵͳ���[].����ҵ�Զ�����2016��05���� 72-75.
����[44]�д��ͨ��DVP-PLC Ӧ�ü����ֲ�[M].�д��ͨ�ɷ�����˾��2011.
����[45] DSP Control System Design Based on Coin Sorting Packaging Machine[].DynamicalSysterms and Control,2016: 61-69.
����[46]�ºƣ�����ȫ������֥����̼�����Ӧ�ð���M].��ѧ��ҵ�����磬2014.
����[47] Yongqi Ma. OBJECT-ORIENTED Finite Element Analysis and Programming In VC ++ [0]. Applied Mathematics and Mchanics2002,��No.12���� 1437-1443.
����[48] WAGO Corp. Modbus-based PLCs [].Plant Engineering2015, Vol.69��No.4���� 66.
����[49] Olivier Hersent David Boswarthick, Omar Elloumi. Modbus[J].EngineeredSystems.005,��No.3��
����[50] ��Ӣ���´���������־������LabVIEW��PLC�Ŀ���ʽ����ϵͳ��������ͨѶ���о�[J].��ϻ������Զ����ӹ������� 2012 ��07���� 49-53.
����[51]�д��ͨ��̨��DVPϵ��PLCͨѶЭ��[M].�д��ͨ�ɷ�����˾��2013.
��л
����æµ���о��������ѽӽ�β�����ڿ������ļ����ظ�֮�ʣ������˻�������ѧϰ�ڼ�������ҵ���ʦ��ͬѧ��������ϵĸ�л��
��������Ҫ��л���˾����ҵĵ�ʦ��־���ڣ����о������ij�ʼ��-ֱ���������ļ����ظ�֮�ʣ�����ʦ������������˽�Ĺ��ĺͰ��������������ڿ�ѧ�о���רע�����̬�ȣ����Ƕ�ѧ����ע��Ѫ����˽�̵��������������ҵ������ѧϰ̬�Ȳ�������̵�Ӱ�죬ʹ���������ࡣ
������Σ���Ҫ��лʵ����ͬ�����Լ��ҵ���������ѧϰ�������и����ҵ�֧�ֺ�������Ϊ�����ǣ��ҵ��о��������÷ḻ��ʡ�
���������Ҫ��л�ҵĸ�ĸ������������ĬĬ�ĸ����������ǵİ���֧�������ܹ�һֱ�ߵ����졣�ڽ��������У��һ����Ŭ�������������ǵ�������
��������Ҫ�鿴��ƪ��ҵ���ȫ�ģ�������ϵ�ͷ���ȡ��