24小时论文定制热线
24小时论文定制热线
摘要
传统机械飞轮由于定转子之间存在接触,有摩擦力大、功耗高、寿命短和噪声大缺点。磁悬浮飞轮克服了传统机械飞轮缺点,还具有主动振动控制和振动抑制的优势。磁悬浮框架飞轮通过偏转磁轴承迫使高速转子偏转,改变转子转速方向,输出瞬间大力矩,驱动航天器平台快速机动。新型磁悬浮陀螺飞轮同时具备框架飞轮的大控制力矩输出和姿态敏感功能,即能利用偏转磁轴承迫使高速转子进动,输出大力矩,也可通过偏转磁轴承补偿干扰力矩,敏感航天器姿态。
新型磁悬浮陀螺飞轮的驱动电机和磁轴承的控制系统是其高精度力矩输出和姿态敏感的保障,控制器的优劣将直接影响到新型磁悬浮陀螺飞轮的运行状态。本文以新型磁悬浮陀螺飞轮为研究对象,对新型磁悬浮陀螺飞轮的驱动电机和磁轴承控制系统进行了设计,从以下四个方面进行了深入研究。
(1)介绍了新型磁悬浮陀螺飞轮的总体结构,新型磁悬浮陀螺飞轮的结构对于搭建的控制系统性能好坏有很大的影响。磁轴承和驱动电机作为被控对象,对其进行了详细的介绍,说明了其工作原理,建立了控制模型,为其高精度驱动做了铺垫。
(2)针对新型磁悬浮陀螺飞轮高精度转速控制的要求,对飞轮电机进行了分析,得到了转速误差的两个主要来源:一是电机本体结构,二是电机换相。重点对本体结构导致的误差进行了分析,提出了基于磁场测量的磁钢修正方案,设计了基于霍尔原理的磁场均匀性测量装置。最后,在搭建的装置上进行了磁场测量实验,实验证明:该装置能够对磁场均匀性进行测量,对电机磁钢装配具有很好的参考作用,提高驱动电机转速精度。
(3)针对高速驱动电机调速范围广、精度要求高的特点,提出了基于模糊自适应 PI 控制器的转速调节算法。以新型磁悬浮陀螺飞轮驱动电机为对象,设计了一套以 DSP 为控制核心的电机驱动器,完成了驱动器的原理图设计和 PCB 布线。最后,编写了电机转速控制代码,并在设计的驱动器上实现了速度调节,通过对采集的霍尔信号和反电动势的波形进行分析,结果表明,该驱动器和算法可较好的实现电机转速控制。
(4)磁轴承控制系统是一个多通道、高集成的控制系统,但由于单独的 DSP 因为资源有限不能满足该控制需求。因此,根据实际需求,设计了一种基于 DSP+FPGA 构型的集成化、低功耗的磁轴承数字控制系统,并完成了原理图设计和 PCB 布线。磁轴承控制系统整体架构是由控制芯片读取转子位移传感器的位置信号,获取转子的位置,输出数字量,控制 D/A 芯片输出控制电压,经过线性功放放大后完成位置闭环。其中,FPGA 负责整体时序控制,驱动 A/D 和D/A 芯片,DSP 完成磁轴承控制的位置闭环算法。最后,完成了磁轴承控制系统的搭建,并对其进行了实验验证。
关键词:磁悬浮陀螺飞轮,转速控制,电机驱动器设计,磁轴承控制系统设计,DSP+FPGA
ABSTRACT
Due to the contact between stator and rotor, traditional mechanical flywheels have the deficiency of large friction, high power consumption,short life and large noise. The deficiency of traditional mechanical flywheels is overcomed by the magnetic suspension flywheel. It also has the advantages of active vibration control and vibration suppression. The high-speed rotor of the magnetic suspension frame flywheel is deflected by deflection magnetic bearing, and the high torque is output by the way of changing the direction of the rotor speed, which drives the spacecraft platform to move quickly. The new type of magnetic suspension gyro flywheel has the function of a large control torque output and attitude sensitivity at the same time. The high-speed rotor precession is made by a deflection magnetic bearing, and output large torque. It can alse use the deflection magnetic bearing to compensate disturbance torque and sense the attitude of the spacecraft.
The drive system of the new magnetic suspension gyro flywheel and the control system of the magnetic bearing are the guarantee of its high-precision torque output and attitude sensitivity. The advantages and disadvantages of the controller will directly affect the operating state of the new magnetic suspension gyro flywheel. The operating state of the new magnetic suspension gyro flywheel is affected directly by the advantages and disadvantages of the controller. This paper takes the new magnetic suspension gyro flywheel as the research object, designs the drive motor and magnetic bearing control system of the new magnetic suspension gyro flywheel, and conducts in-depth research from four aspects. The drive motor and magnetic bearing control system of the new magnetic suspension gyro flywheel is designed, and conducts in-depth research from four aspects.
(1) The overall structure of the new magnetic gyro flywheel is introduced. The structure of the new magnetic suspension gyro flywheel has a great influence on the performance of the control system. The magnetic bearing and the driving motor are introduced in detail as the controlled object, and the working principle is explained and the control model is set up to make the paving for its high precision drive.
(2) Aimming at the high precision speed control of the new magnetic suspension gyro flywheel, the source of the speed error is analyzed in two aspects, one is the structure of the motor and the two is the commutation of the motor. The emphasis is on the analysis of the error caused by the structure of the body. A magnetic steel correction scheme based on magnetic field measurement is proposed, and a magnetic field uniformity measurement device based on Holzer's principle is designed. Finally,magnetic field measurement experiments were carried out on the built device. The experiment shows that the device can measure the uniformity of the magnetic field, and has a good reference effect on the assembly of the motor magnetic steel. It has important engineering value and can improve the precision of the driving motor.
(3) Aiming at the wide speed range and high accuracy requirement of high-speed drive motor, a speed adjustment algorithm based on fuzzy adaptive PI controller is proposed. A new type of magnetic suspension gyro flywheel drive motor is taken as the object. A set of motor drives with DSP as the control core is designed. The schematic design and PCB wiring of the driver are completed. Finally, the motor speed control code is written, and the speed regulation is realized on the designed driver. The analysis of the hall signal and the anti electromotive force waveform is carried out. The result shows that the driver and the algorithm can realize the motor speed control better.
(4) The magnetic bearing control system is a multi channel and high integrated control system, however, due to the limited resources, the single DSP cannot meet the control requirement. Therefore, according to the actual needs, A kind of integrated and low power magnetic bearing digital control system based on DSP+FPGA configuration is designed,and the PCB routing is completed. The overall structure of the magnetic bearing control system is to read the position signal of the rotor displacement sensor by the control chip, and the position of the rotor is obtained, digital quantity is output , and the D/A chip control of the voltage is output, and complete the position closed loop after the amplifier is amplified by linear amplifier. Among them, FPGA is responsible for the whole timing control, the A/D chip is draven by the FPGA, and the position closed loop algorithm of the magnetic bearing control is completed by DSP. Finally, the control system of the magnetic bearing is completed and tested.
KEY WORDS: Magnetic suspension gyro flywheel, Speed control,Motor driver design, Magnetic bearing control system design,DSP+FPGA
随着我国飞行器应用技术的发展,特别是高分辨率和载人航天工程的快速发展,对航天器姿态控制系统的技术指标有了更高要求,其具体表现主要体现在以下几个层面:(1)姿态控制性能的提升,提高姿态控制指向精度和姿态稳定精度;(2)姿态控制能力的扩展;(3)姿态控制系统的寿命和稳定性的提高,保障其低故障率。姿态控制系统执行机构的可靠性将直接影响到整个飞行器的服役周期,因此对于姿态控制系统的可靠性提出了更高的要求。伴随着高分辨率对地观测卫星、载人航天工程以及航空航天技术的快速发展[1],研制新一代高精度、长寿命的飞轮、控制力矩陀螺以及惯性稳定平台成为航空航天技术发展的迫切需求。
根据空间飞行器作用原理的不同,其姿态控制执行机构主要分为三种[2]:第一种直接利用外部器件,改变力矩进而完成姿态调整;第二种为质量排出装置,根据力的相互作用原理,喷射出一定量的气体调节姿态;第三种为动量交换装置,最常见的是飞轮[3,4]。飞轮系统姿态控制精度较高,消耗电能,不消耗燃料,既可以用来对姿态进行稳定控制,又可以对姿态进行机动控制。飞轮作为姿控系统的主要部件,通过控制转子转速大小改变角动量实现力矩输出进而对航天器的姿态进行调整。传统的机械飞轮由于摩擦力矩的存在限制了控制力矩精度的提高[5-7],磁悬浮飞轮采用磁悬浮方式进行支承,具有无摩擦,精度高和线性度好的特点。磁悬浮飞轮根据其所处转速带划分为反作用飞轮[8],偏置动量轮[9]和姿控/储能两用飞轮[10]。
根据磁轴承转子的自由度数目的差异,使用磁轴承进行支承的飞轮可以分成五种形式,分别是单自由度、两自由度、三自由度、四自由度和五自由度[11]。五自由度主动悬浮陀螺飞轮可以实现五个自由度的主动控制,能够通过磁力的调节对转子不平衡引起的扰动力进行抑制,具有低扰动和控制精度高的特点,特别适合在高精度地球观测卫星和科学考察卫星的姿态控制系统中使用。利用其五个自由度都可以主动控制的特点,如果对旋转轴的偏转进行控制,可以输出瞬间大力矩,完成框架控制能力,利用其陀螺效应,可以降低数量,完成卫星三个自由度的姿态调整,大大减小姿控机构重量,提高姿控系统的稳定性,保障其长时间运行。另外,如果采取适当的方式,在磁悬浮飞轮的工作过程中,可以降低星体的主动振动。五自由度磁悬浮飞轮自身具有一系列优势,是目前磁悬浮飞轮发展的一个重要分支。磁悬浮飞轮的力矩输出具有很高的精度,但是力矩的值很小,不能使卫星瞬间完成姿态变换。磁悬浮陀螺飞轮通过偏转磁轴承改变高速旋转轴的方向,完成瞬间大力矩的输出,此外偏转磁轴承还可以对偏转干扰力矩进行补偿,使其兼具敏感功能[12]。
磁悬浮陀螺飞轮主要两个系统构成,为磁轴承系统和高速电机系统[13,14]。磁轴承系统是其核心系统,其关键技术包括磁轴承电磁设计分析、机械结构设计、磁轴承控制器设计和电机驱动器设计。磁悬浮陀螺飞轮主要工作环境是在宇宙空间中,环境的特殊性决定了磁悬浮飞轮的设计必须遵循低功耗,小体积和可靠性的指标要求。磁轴承系统是磁悬浮飞轮最核心的部分,其性能对磁悬浮陀螺飞轮整机的性能起着决定性的作用。磁悬浮陀螺飞轮依靠磁力实现转子的悬浮,电磁之间的相互转换,导致其是一个不稳定的系统,由于电、磁、力之间存在耦合,必须采取一定的控制措施,才能够使控制系统正常工作。磁轴承控制系统性能的优劣将对新型磁悬浮陀螺飞轮的正常工作有重要影响。因此,评判一个磁悬浮陀螺飞轮系统的好坏的标准是磁轴承电磁分析设计、机械结构设计和控制系统三者之间相互配合程度的好坏。
为了缩短我国现有卫星平台与国外同平台相比的主要技术差距,如姿态控制精度低,机动能力不足,活动寿命短、可靠性低等。中国人民解放军航天工程大学、北京控制工程研究所、北京科技大学和北京石油化工学院等单位为了进一步提高磁悬浮陀螺飞轮的精度,提出了一种新型结构的磁悬浮陀螺飞轮[16-18],并已经完成原理样机的制作,现在已经开始进行调试,目前调试一切顺利,精度进一步提高。
目前国内外竞相掀起研究磁悬浮陀螺飞轮研究热潮。其中,国外如日本、美国、法国、瑞士、英国和德国等国家开始制定相应的研究计划,并取得了一定成就;国内以北京航空航天大学、国防科技大学等高校也都开展了相关领域的研究。
国内磁悬浮飞轮起步很晚。“十五”期间,中国的科研机构和高校才开始磁悬浮飞轮技术的研究,主要以中国航天科技集团 8 院 812 所,国防科技大学、北京航空航天大学等单位为核心。
北京航空航天大学是国内最早和唯一对磁悬浮控制力矩陀螺进行研究的单位,于从 20 世纪 90 年代末期,首先开始对大型空间站用单框架磁悬浮控制力矩陀螺进行论证,还继续研究了磁悬浮动量轮、磁悬浮反作用飞轮、磁悬浮姿控/储能两用飞轮[41-44]。北京航空航天大学已经掌握了磁悬浮飞轮和磁悬浮控制力矩陀螺系统总体设计[39]、低功耗永磁偏置磁轴承设计[40]等多项关键技术。
航天 8 院 812 所与高校进行合作,研制成功了纯电磁支撑的外转子结构的磁悬浮飞轮和轴向永磁被动悬浮的磁悬浮飞轮。图 1-11 所示为 812 所研制的磁悬浮飞轮原理样机。国防科技大学开展了两自由度主动控制型 MSFW 和四自由度主动控制型 MSMW 的研究。
新型磁悬浮陀螺飞轮驱动电机控制系统实验:
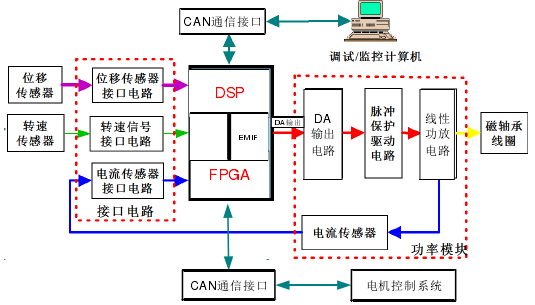
磁轴承控制系统结构图

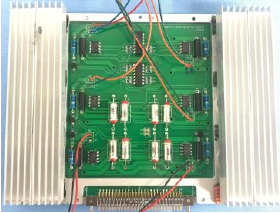
磁轴承控制板
偏转磁轴承功率板
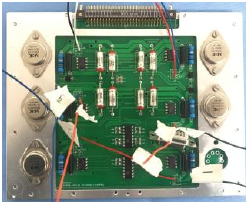
径、轴向磁轴承功率板

测试板
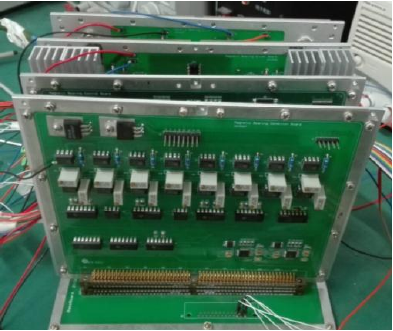
磁轴承控制系统实物图
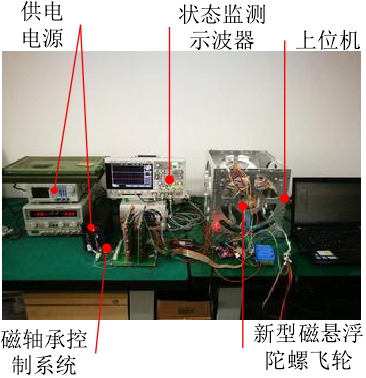
磁轴承控制系统测试台
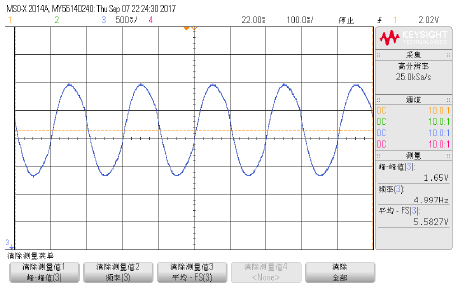
磁轴承控制系统输出 5Hz 的正弦波形
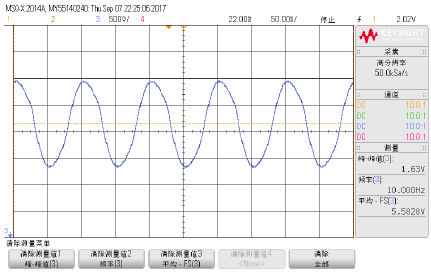
频率为 10Hz 正弦波形
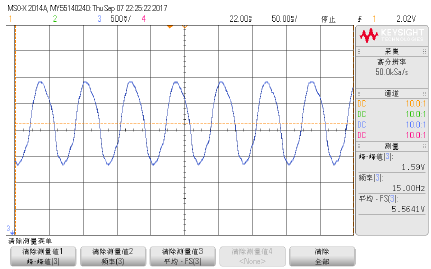
频率为 15Hz 正弦波形
对轴向磁轴承施加阶跃信号波形图
目 录
第一章 绪论
1.1 选题背景与研究意义
1.2 磁悬浮陀螺飞轮发展现状研究
1.2.1 磁悬浮陀螺飞轮国外研究现状
1.2.2 磁悬浮陀螺飞轮国内研究现状
1.3 磁悬浮陀螺飞轮控制系统研究现状
1.4 论文内容与工作安排
第二章 新型磁悬浮陀螺飞轮结构和控制模型
2.1 引言
2.2 新型磁悬浮陀螺飞轮结构
2.3 驱动电机结构
2.4 磁轴承结构
2.4.1 磁阻力磁轴承
2.4.2 洛伦兹力磁轴承
2.5 本章小结
第三章 驱动电机控制误差分析及磁场测量装置实现
3.1 引言
3.2 高速驱动电机控制精度误差分析
3.3 高速驱动电机磁场测量方案研究
3.3.1 高速电机磁场均匀性测试方案
3.3.2 线性霍尔传感器测量电路设计
3.4 磁场测量电路实验测试与结果分析
3.5 本章小结
第四章 模糊自适应 PI 控制算法及电机驱动器设计实现
4.1 引言
4.2 高速驱动电机高精度控制方法
4.2.1 高速驱动电机数学模型建立
4.2.2 高速驱动电机双闭环调速系统实现
4.3 基于自适应模糊 PI 的电机高精度控制
4.3.1 自适应模糊 PI 控制器方案
4.3.2 自适应模糊 PI 控制器设计
4.4 高速驱动电机测试环境搭建与实验
4.4.1 高速电机驱动器硬件设计
4.4.2 高速电机驱动器软件设计
4.4.3 实验研究
4.5 本章小结
第五章 磁轴承控制系统搭建与实验研究
5.1 引言
5.2 新型磁悬浮陀螺飞轮磁轴承控制系统设计
5.2.1 控制需求分析
5.2.2 控制方案确定
5.3 新型磁悬浮陀螺飞轮控制系统硬件设计
5.3.1 核心控制板设计
5.3.2 功率板设计
5.3.3 母板与测试板设计
5.3.4 硬件加工设计
5.4 新型磁悬浮陀螺飞轮控制系统软件设计
5.5 新型磁悬浮陀螺飞轮控制系统悬浮实验
5.6 本章小结
第六章 结论与展望
6.1 结论
6.2 展望
参 考 文 献
致 谢
研究成果及发表的学术论文
作者及导师简介
(如您需要查看本篇毕业设计全文,请您联系客服索取)